【空地协同技术教程:概念与技术手段解析】
空地协同技术教程:概念与技术手段解析
一、空地协同的概念与核心价值
定义
空地协同(Air-Ground Collaboration)是指通过无人机(UAV)与无人车(UGV)等异构平台的跨域协作,利用各自的感知、运动与任务执行优势,实现复杂环境下的高效任务完成。其核心理念是通过功能互补,提升系统的环境适应性、任务执行效率和智能化水平。
应用场景
- 军事领域:战场侦察、目标追踪、协同打击(如“三位一体”巡逻模式)。
- 灾害救援:快速构建灾区三维地图、物资投送、生命探测。
- 智慧城市:交通监控、管道检测、森林防火。
- 工业检测:地下设施巡检、大型设备维护。
二、关键技术手段
协同感知与地图构建
-
多传感器融合
结合激光雷达(LiDAR)、IMU、摄像头等多源数据,构建多层次地图(如点云地图、栅格地图),并通过自适应算法(如随机采样一致性算法)修正地图倾斜问题。
示例:空中机器人提供全局俯视地图,地面机器人补充盲区细节。 -
实时SLAM技术
基于视觉或激光SLAM实现动态环境中的同步定位与地图构建,并通过增量式优化算法提升实时性。例如,单目视觉SLAM结合GPS定位生成地理信息地图。 -
路网与目标检测
利用深度学习模型(如改进的YOLOv5+CBAM注意力机制)识别小目标,提取路网信息辅助地面导航。
通信与协同控制
-
异构网络通信
采用5G、Wi-Fi、LoRa等多模通信协议,支持动态路由管理,确保空地平台间数据实时传输。例如,地面站通过自组网协调UAV与UGV任务。 -
编队与路径规划
- 空中编队:基于群智涌现理论优化无人机集群的避障与任务分配。
- 地面导航:使用Dijkstra算法与动态窗口法(DWA)规划UGV路径,结合代价地图实时避障。
任务规划与决策
-
数据融合与智能决策
通过多模态数据融合(如激光雷达+视觉),结合强化学习或规则引擎生成任务策略。例如,无人机发现目标后,地面车辆自动规划接近路径。 -
动态追捕与协作
在追捕任务中,UAV负责全局目标定位,UGV执行拦截,通过协同定位算法(如扩展卡尔曼滤波)提高定位精度。
协同定位与校准
- 跨域标定
利用地面标记物或无线电测距,实现UGV与UAV的联合定位。例如,UGV作为参考点修正UAV的GPS误差。
技术难点:解决异构平台坐标系差异与时延问题。
三、典型技术框架
系统架构
- 控制层:中央决策模块协调任务优先级。 负责全局任务规划与调度,通过中央决策模块协调异构平台的任务优先级。例如,无人机提供空中全局视野,无人车执行地面精细操作,形成“全局指挥+局部执行”的协同模式。控制中心支持远程指令下发与实时监控,确保任务高效执行 。
- 感知层:UAV(全局视角)与UGV(局部细节)协同感知。 结合多模态传感器(如激光雷达、视觉相机、超声波传感器)实现环境感知。无人机提供俯视视角的广域覆盖,无人车补充地面细节与盲区信息,通过多源数据融合生成统一的环境地图(如点云地图、栅格地图) 。
- 执行层:无人机投送物资、无人车执行精细操作。 根据任务需求动态分配异构平台的执行动作。例如,无人机投送物资或执行侦察,无人车进行障碍物避障或设备维护,无人船负责水域监测,形成“空中-地面-水面”立体化协作 。
案例:洛马公司K-MAX无人机吊运无人车至危险区域执行检测。
软件工具链与支撑平台
- 开源框架:ROS(机器人操作系统)支持多机通信与任务调度。 基于ROS/Gazebo或AirSim搭建高保真协同仿真环境,支持算法验证与快速迭代。开源框架(如OpenCV、PCL)提供数据处理与算法开发基础 。
- 商业平台:PCS系统实现跨平台控制策略优化。
- 硬件与能源管理:无人机搭载高性能计算单元(如NVIDIA Orin-Nano)支持边缘计算,无人车采用模块化设计适应复杂地形。能源优化技术(如动态功率分配)延长任务时间 。
四、挑战与未来方向
当前挑战
空地协同技术在实际应用中面临通信、感知、任务规划、定位、硬件、安全、标准化和法律等多方面的挑战。解决这些问题需要跨学科的技术创新与系统优化,同时也需要政策法规的支持与规范。随着技术的不断进步,空地协同有望在更多领域实现规模化应用。空地协同技术在实际应用中面临诸多具体挑战,主要包括以下几个方面:
1. 通信与协同控制
-
通信时延与稳定性
空地协同依赖于实时数据传输,但无线通信(如Wi-Fi、5G)在复杂环境中容易受到干扰,导致通信时延或中断。例如,城市环境中的建筑物遮挡或电磁干扰会显著降低通信质量。 -
异构网络整合
UAV与UGV可能使用不同的通信协议或频段,导致数据交换困难。如何实现异构网络的无缝整合是一个技术难点。 -
协同控制精度
由于通信时延和平台动态特性差异,协同控制的精度可能受到影响,尤其是在高速运动或复杂任务中。
2. 感知与地图构建
-
多传感器数据融合
UAV与UGV搭载的传感器类型和数据格式可能不同,如何高效融合多源数据并生成一致的环境地图是一个挑战。 -
实时性与精度平衡
实时SLAM技术在动态环境中可能面临计算资源不足的问题,导致地图构建精度下降或实时性不足。 -
盲区与视角差异
UAV的俯视视角与UGV的平视视角可能导致感知盲区,特别是在复杂地形或密集障碍物环境中。
3. 任务规划与决策
-
动态环境适应性
在动态环境中(如移动障碍物或突发任务),如何快速调整任务规划并保证协同效率是一个难题。 -
异构平台任务分配
UAV与UGV的功能差异可能导致任务分配不均衡,如何根据平台特性优化任务分配策略需要深入研究。 -
智能决策能力
当前的决策算法(如规则引擎或强化学习)在复杂场景中可能表现不佳,如何提升系统的自主决策能力是一个关键问题。
4. 协同定位与校准
-
坐标系差异
UAV与UGV的坐标系可能不一致,如何实现跨域标定并保证定位精度是一个技术难点。 -
定位误差累积
在长时间任务中,定位误差可能逐渐累积,尤其是在GPS信号弱或缺失的环境中(如室内或地下)。 -
动态校准
在任务执行过程中,平台的位置和姿态可能发生变化,如何实现动态校准以保证协同精度是一个挑战。
5. 硬件与能源限制
-
平台负载能力
UAV的负载能力有限,可能无法搭载高性能传感器或计算设备,限制了感知与计算能力。 -
能源效率
UAV与UGV的能源消耗模式不同,如何优化能源管理以延长任务时间是一个实际问题。 -
环境适应性
在极端环境(如高温、高湿或强风)中,平台的可靠性和性能可能显著下降。
6. 安全与可靠性
-
避障与路径冲突
在复杂环境中,UAV与UGV可能面临路径冲突或碰撞风险,如何实现高效避障是一个技术难题。 -
系统容错性
当某个平台出现故障时,如何保证系统的整体任务执行能力是一个挑战。 -
隐私与安全
在智慧城市等应用中,空地协同系统可能涉及隐私数据或关键基础设施,如何保证数据安全与系统可靠性是一个重要问题。
7. 标准化与成本
-
标准化缺失
目前缺乏统一的通信协议、接口规范和测试标准,导致系统开发与集成成本较高。 -
高昂的开发成本
空地协同系统的研发和部署需要大量资金投入,限制了其在中小规模项目中的应用。
8. 法律与伦理问题
-
空域管理
UAV的飞行可能受到空域管理法规的限制,特别是在城市或敏感区域。 -
伦理与责任
在军事或灾害救援等高风险场景中,如何界定系统决策的责任归属是一个伦理难题。
未来趋势
- 智能化:AI驱动的自主任务分配(如群智涌现理论)。
- 标准化:统一通信协议与接口规范(如数字空间共同体框架)。
- 扩展应用:向海陆空全域协同(如无人船+无人机+无人车)演进。
五、实践建议
开发流程
- 需求分析 → 硬件选型(传感器/通信模块) → 算法开发(SLAM/路径规划) → 仿真测试 → 实地验证。
工具推荐
- 仿真平台:Gazebo、AirSim
- 算法库:OpenCV、PCL(点云处理)
案例学习
- 参考美军“黑骑士”无人坦克与无人机协同作战案例,优化火力与侦察协作。
通过上述技术整合,空地协同系统可显著提升复杂任务执行效率,成为未来低空经济与智能城市建设的关键支撑。
相关文章:

【空地协同技术教程:概念与技术手段解析】
空地协同技术教程:概念与技术手段解析 一、空地协同的概念与核心价值 定义 空地协同(Air-Ground Collaboration)是指通过无人机(UAV)与无人车(UGV)等异构平台的跨域协作,利用各自的…...

【2025小黑课堂】计算机二级WPS精选系列20G内容(可下载:真题+预测卷+软件+选择题)
2025年3月全国计算机等级考试即将于3月29日至31日举行。为了帮助广大考生高效备考,小编特意收集并整理了最新版(备考2025年3月)的小黑课堂计算机二级WPS 电脑题库软件,助力考生在考试中游刃有余,轻松通关! …...

蓝桥杯备赛:炮弹
题目解析 这道题目是一道模拟加调和级数,难的就是调和级数,模拟过程比较简单。 做法 这道题目的难点在于我们在玩这个跳的过程,可能出现来回跳的情况,那么为了解决这种情况,我们采取的方法是设定其的上限步数。那么…...

kotlin高级用法总结
Kotlin 是一门功能强大且灵活的编程语言,除了基础语法外,它还提供了许多高级特性,可以帮助你编写更简洁、高效和可维护的代码。以下是 Kotlin 的一些高级用法,涵盖了协程、扩展函数、属性委托、内联类、反射等内容。 协程&#x…...
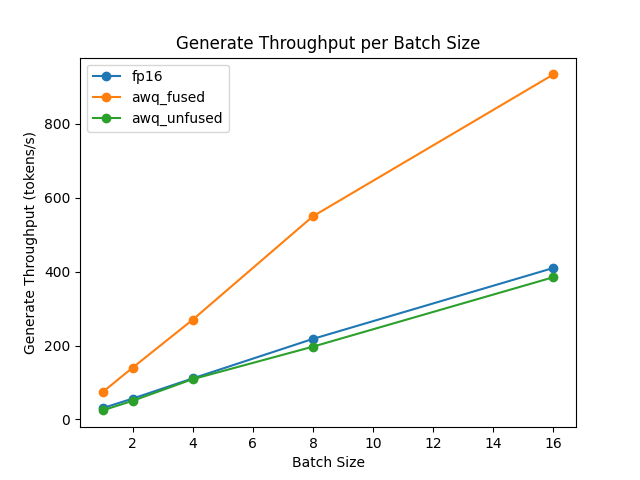
transformers - AWQ
本文翻译整理自:https://huggingface.co/docs/transformers/main/en/quantization/awq 文章目录 一、引言二、加载 autoawq 量化的模型三、Fused modules支持的架构不受支持的架构 四、ExLlamaV2五、CPU 一、引言 Activation-aware Weight Quantization (AWQ) 激活…...

mysql下载与安装、关系数据库和表的创建
一、mysql下载: MySQL获取: 官网:www.mysql.com 也可以从Oracle官方进入:https://www.oracle.com/ 下载地址:https://downloads.mysql.com/archives/community/ 选择对应的版本和对应的操作系统ÿ…...

在华为设备上,VRRP与BFD结合使用可以快速检测链路故障并触发主备切换
在华为设备上,VRRP与BFD结合使用可以快速检测链路故障并触发主备切换。以下是VLAN接口下配置VRRP与BFD的步骤: 目录 1. 配置BFD会话 2. 配置VLAN接口 3. 配置VRRP 4. 验证配置 5. 保存配置 1. 配置BFD会话 在两台设备之间配置BFD会话,…...

RK3588开发笔记-fiq_debugger: cpu 0 not responding, reverting to cpu 3问题解决
目录 前言 一、FIQ Debugger介绍 二、rockchip平台配置方法 三、问题分析定位 IRQF_NOBALANCING 的含义 总结 前言 在进行 RK3588 开发的过程中,我们可能会遇到各种棘手的问题。其中,“fiq_debugger: cpu 0 not responding, reverting to cpu 3” 这个错误出现在RK3588的…...

新能源汽车充电综合解决方案:安科瑞电气助力绿色出行
安科瑞 华楠 18706163979 随着新能源汽车的迅猛发展,充电基础设施的建设成为了推动行业进步的关键。然而,充电技术滞后、运营效率低下、车桩比失衡等问题,依然困扰着广大车主和运营商。今天,我们要为大家介绍一款新能源汽车充电…...

大语言模型进化论:从达尔文到AI的启示与展望
文章大纲 引言大语言模型中的“进化论”思想体现遗传变异过度繁殖和生存斗争大模型“过度繁殖”与“生存竞争”机制解析**一、过度繁殖:技术迭代的指数级爆发****二、生存竞争:计算资源的达尔文战场****三、生存竞争胜出关键要素****四、行业竞争格局演化趋势**核心结论自然选…...

Spring Boot与Axon Framework整合教程
精心整理了最新的面试资料和简历模板,有需要的可以自行获取 点击前往百度网盘获取 点击前往夸克网盘获取 简介 Axon Framework是一个用于构建CQRS(命令查询职责分离)和事件溯源(Event Sourcing)应用的框架࿰…...

深度学习Dropout
一、概念 Dropout是为了解决过拟合,当层数加深,就有可能过拟合,这个时候模型太复杂就会过拟合,那么可以让模型变得简单一点,所以就可以随机挑一些神经元,让某些神经元的输出是0,只保留部分神经…...

2025华为OD机试真题E卷 - 螺旋数字矩阵【Java】
题目描述 疫情期间,小明隔离在家,百无聊赖,在纸上写数字玩。他发明了一种写法:给出数字个数 n (0 < n ≤ 999)和行数 m(0 < m ≤ 999),从左上角的 1 开始,按照顺时针螺旋向内写方式,依次写出2,3,…,n,最终形成一个 m 行矩阵。小明对这个矩阵有些要求: 1、…...

DeepSeek 助力 Vue3 开发:打造丝滑的表格(Table)示例3: 行选择
前言:哈喽,大家好,今天给大家分享一篇文章!并提供具体代码帮助大家深入理解,彻底掌握!创作不易,如果能帮助到大家或者给大家一些灵感和启发,欢迎收藏关注哦 💕 目录 Deep…...
)
Linux驱动开发(1.基础创建)
序言:从高层逻辑到底层硬件的回归 在当今的软件开发中,我们习惯于用高级语言构建抽象层——通过框架、库和云服务快速实现功能。这种“软逻辑”的便利性让开发效率倍增,却也逐渐模糊了我们对计算机本质的认知:一切代码终将落地为…...

mmseg
系列文章目录 文章目录 系列文章目录bug bug File "/public/home/rsinfo/project/mmsegmentation/mmseg/__init__.py", line 61, in <module>assert (mmcv_min_version < mmcv_version < mmcv_max_version), \ AssertionError: MMCV2.2.0 is used but i…...

LangChain核心概念
下面整理的LangChain部分核心概念: 聊天模型【Chat models】:通过聊天 API 暴露的大语言模型(LLMs),将消息序列作为输入,并输出一条消息。消息【Messages】:聊天模型中的通信单元,…...

阿里巴巴全新推理模型QwQ-32B:性能比肩DeepSeek-R1,开源引领未来
摘要 阿里巴巴集团于深夜正式发布全新推理模型QwQ-32B,其性能与DeepSeek-R1完整版相当。该模型已通过Apache 2.0开源协议在Hugging Face和ModelScope平台发布。用户可通过Qwen Chat平台直接体验QwQ-32B的强大功能。这一举措不仅展示了阿里巴巴在人工智能领域的技术实…...

使用Arduino和ESP8266进行基于物联网的垃圾箱监控
使用 Arduino 和 ESP8266 的基于 IOT 的垃圾箱监控系统 在这个 DIY 中,我们将制作一个基于 IOT 的垃圾箱/垃圾监控系统,该系统将通过网络服务器告诉我们垃圾桶是空的还是满的,并且您可以通过互联网从世界任何地方了解“垃圾桶”或“垃圾箱”的状态。它将非常有用,可以安装…...
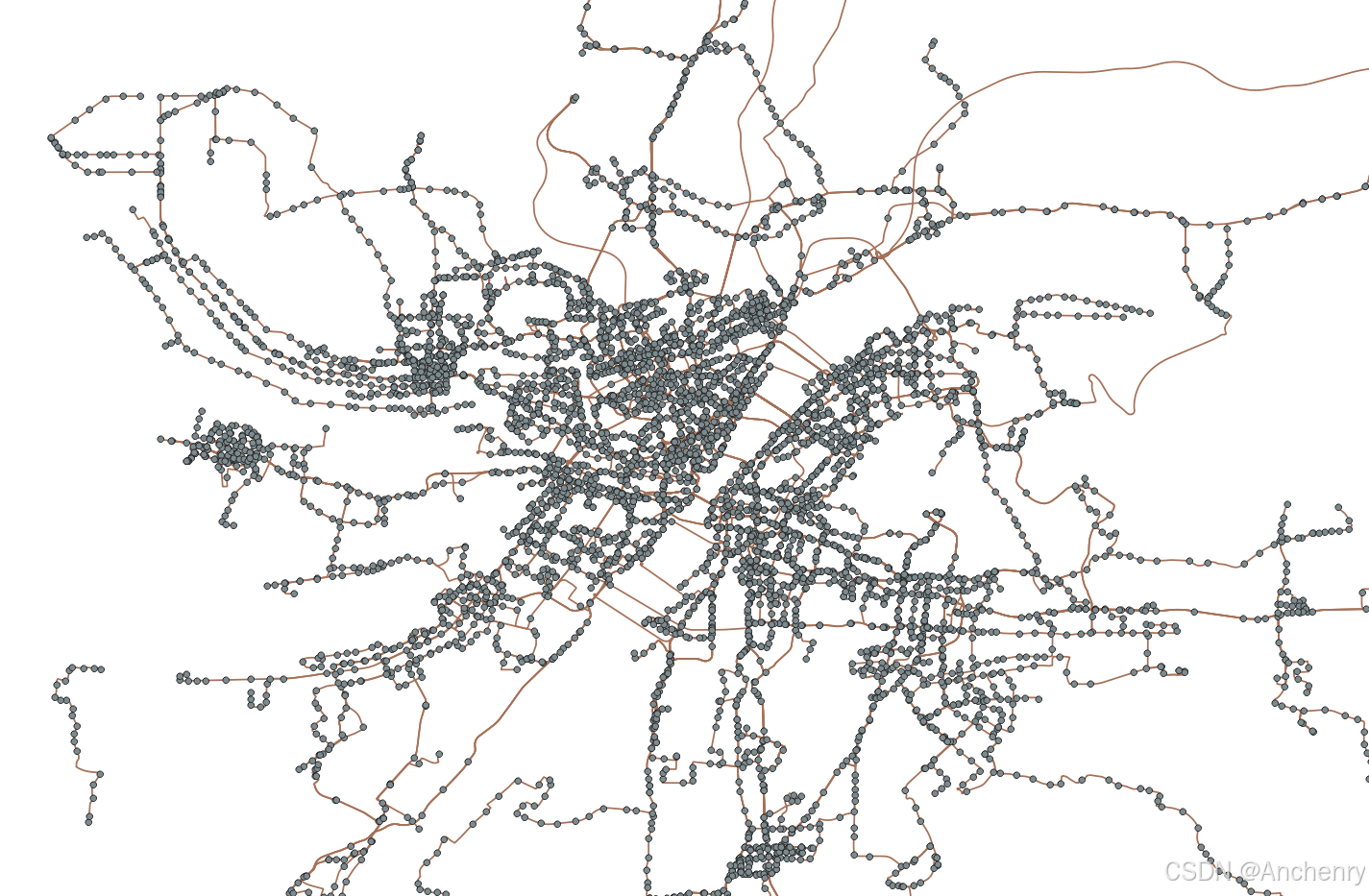
【Python爬虫】爬取公共交通路网数据
程序来自于Github,以下这篇博客作为完整的学习记录,也callback上一篇爬取公共交通站点的博文。 Bardbo/get_bus_lines_and_stations_data_from_gaode: 这个项目是基于高德开放平台和公交网获取公交线路及站点数据,并生成shp文件,…...

Tessent Shell双Pass插入策略深度解读:为什么MemoryBIST要先于EDT/OCC插入?
Tessent Shell双Pass插入策略:MemoryBIST优先于EDT/OCC的技术本质解析 在芯片测试领域,Tessent Shell的双Pass插入流程(Two-Pass Insertion Process)是一个被广泛采用却鲜少深入探讨的核心方法论。当工程师首次接触"先Memory…...

NoFences:重构桌面空间的区域化引擎
NoFences:重构桌面空间的区域化引擎 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 副标题:三步打造个性化桌面系统 痛点分析:你的桌面是…...

Qwen3-32B-Chat中文优化:提升OpenClaw本地任务理解准确率
Qwen3-32B-Chat中文优化:提升OpenClaw本地任务理解准确率 1. 为什么需要优化本地模型的中文理解能力 去年冬天,当我第一次尝试用OpenClaw自动化整理电脑上的文件时,遇到了一个令人哭笑不得的场景。我对它说"把上周下载的PDF文件按日期…...

Fish Speech-1.5多语种支持实战:阿拉伯语右向文本语音生成注意事项
Fish Speech-1.5多语种支持实战:阿拉伯语右向文本语音生成注意事项 1. 引言 语音合成技术正在改变我们与数字世界的交互方式,而多语言支持更是让这项技术真正走向全球化。Fish Speech-1.5作为一款强大的文本转语音模型,支持包括阿拉伯语在内…...

告别手动切图:用快马ai生成脚本,自动化ps设计稿导出与标注
作为一名长期与PS打交道的设计师,我深知重复性切图标注的痛苦。每次设计稿调整后,手动导出图层、记录样式、测量间距的过程不仅枯燥,还容易出错。最近尝试用InsCode(快马)平台的AI辅助生成自动化脚本,意外发现效率提升显著。以下是…...

终极指南:如何利用MMKV在电商应用中实现高并发存储优化
终极指南:如何利用MMKV在电商应用中实现高并发存储优化 【免费下载链接】MMKV Tencent/MMKV: MMKV 是一个高效的键值对存储库,用于 Android 和 iOS 应用程序,具有高速,紧凑和易用的特点。 项目地址: https://gitcode.com/gh_mir…...

解密革命性构建工具:PoeCharm如何突破传统限制实现高效角色规划
解密革命性构建工具:PoeCharm如何突破传统限制实现高效角色规划 【免费下载链接】PoeCharm Path of Building Chinese version 项目地址: https://gitcode.com/gh_mirrors/po/PoeCharm 在流放之路的复杂游戏生态中,角色构建往往成为玩家面临的最大…...

避开Unity动态合批的坑:为什么你的Dynamic Batching不生效?
深度剖析Unity动态合批失效的六大技术陷阱与实战解决方案 当你在Unity项目中精心设计了数百个低多边形道具,却发现性能面板中的Draw Calls居高不下时,动态合批(Dynamic Batching)很可能正在暗中失效。本文将揭示那些官方文档未曾详…...

LoRA训练助手实际作品集:50+真实图片描述→高质量英文Tag转化示例
LoRA训练助手实际作品集:50真实图片描述→高质量英文Tag转化示例 1. 工具简介与核心价值 LoRA训练助手是一个专门为AI绘画爱好者设计的智能标签生成工具。无论你是想要训练自己的Stable Diffusion模型,还是需要为FLUX模型准备训练数据,这个…...

FreeMoCap终极指南:如何用普通摄像头实现专业级3D动作捕捉
FreeMoCap终极指南:如何用普通摄像头实现专业级3D动作捕捉 【免费下载链接】freemocap Free Motion Capture for Everyone 💀✨ 项目地址: https://gitcode.com/GitHub_Trending/fr/freemocap 还在为专业动作捕捉设备的高昂价格而烦恼吗ÿ…...