PX4中的DroneCAN的实现库Libuavcan及基础功能示例
简介
Libuavcan是一个用C++编写的可移植的跨平台库,对C++标准库的依赖小。它可以由几乎任何符合标准的C++编译器编译,并且可以在几乎任何体系结构/OS上使用。
在 DroneCAN 中,Libuavcan 有一个 DSDL 编译器,将 DSDL 文件转换为 hpp 头文件。编译器名为 libuavcan_dsdlc,调用方式如下:
libuavcan_dsdlc source_dir
其中 source_dir 是包含要编译的数据类型定义的根命名空间目录,例如 dsdl/uavcan。
在编译应用程序和/或库之前,必须在构建过程中调用DSDL编译器来生成头文件。
PX4中DSDL编译流程
结合上述的编译命令,再结合《UAVCAN_V1的实现库libcanard与数据格式DSDL》中 uavcan_v1 调用脚本生成头文件的过程。在 PX4 中,可以看出 DroneCAN 在 PX4 中的编译方式:
在 uavcan 模块的 CMakeLists 文件中,先设置 DSDL 文件的路径以及输出头文件的路径,之后调用 libuavcan_dsdlc 命令生成响应的文件:


节点初始化和启动
为了将UAVCAN功能添加到应用程序中,我们必须创建UAVCAN::node类的节点对象,这是库 调用 API 函数的基础。该类需要访问 CAN 底层驱动程序和系统时钟,这是特定于平台的组件,因此它们通过以下接口与库隔离:
uavcan::ICanDriver //CAN驱动
uavcan::ICanIface //CAN实例
uavcan::ISystemClock //系统时钟
具体在 PX4 中的体现,在 uavcannode 进程中的 uavcannode 类,在创建节点的时候,都会获取 can 设备以及系统时钟:

在 STM32 底层的 can 驱动中,会调用 ICanIface 类来获取实例:

也就是说,创建一个 uavcan 节点,必须包含上面的这三个类。
内存管理
Libuavcan 不使用堆。
动态内存
动态内存分配由恒定时间的无碎片块内存分配器管理。专用于块分配的内存池的大小通过节点类uavcan::node 的模板参数来定义。如果未提供模板参数,则节点将期望应用程序向构造函数提供对自定义分配器的引用。
库使用动态内存完成的功能为:
1)为接收多帧传输分配临时缓冲器;
2)保持接收器状态;
3)保存传输ID映射;
4)优先发送队列。
内存池大小的计算
通常,内存池的大小在 4KB(对于简单节点)和 512KB(对于非常复杂的节点)之间。
内存池的最小安全大小可以计算为以下值总和的两倍:
对于每个传入的数据类型,将其最大序列化长度乘以可能发布它的节点数,并将结果相加。
将所有传出数据类型的最大串行化长度相加,乘以节点可用的CAN接口数加1。
示例:
| CAN 实例数 | 2 |
|---|---|
| 传入数据类型 A 的发布节点数 | 3 |
| 传入数据类型 A 的序列化后最大字节数 | 100 bytes |
| 传入数据类型 B 的发布节点数 | 32 |
| 传入数据类型 B 的序列化后最大字节数 | 24 bytes |
| 传出数据类型 X 的序列化后最大字节数 | 256 bytes |
| 传出数据类型 Z 的序列化后最大字节数 | 10 bytes |
最终需要分配的内存大小为:
2 * ((3 * 100 + 32 * 24) + (2 + 1) * (256 + 10)) = 3732 bytes
线程
从线程的角度来看,可以使用以下配置:
单线程 ---完全在一个线程中运行。
多线程 ---在两个线程中运行:
主线程,适用于硬实时、低延迟通信;
辅助线程,适用于阻塞、I/O密集型或CPU密集型任务,但不适用于实时任务。
单线程配置
在单线程配置中,库的线程应该在 Node<>::spin() 内阻塞。或者周期性地调用 Node<>::spin() 或Node<>::spinOnce()。
典型示例:
for (;;)
{/*线程调用时间 100ms*/const int error = node.spin(uavcan::MonotonicDuration::fromMSec(100));if (error < 0){std::cerr << "Transient error: " << error << std::endl; // 处理发送错误}
}
Node<>::spin() 和 Node<>::spinOnce() 之间的区别如下:
spin() ---阻塞超时,然后返回,即使某些CAN帧或计时器事件仍在等待处理。
spinOnce() ---在处理完所有可用的CAN帧和计时器事件后,它立即返回,而不是阻塞。
应用示例
以下举出了常用功能的示例:
1)发布与订阅
2)服务类消息
3)时间同步
4)固件升级
还有许多其余的例程,可以进入官网查看相关的解释:https://dronecan.github.io/Implementations/Libuavcan/Tutorials/10._Dynamic_node_ID_allocation/
发布与订阅
以下为一个示例,发布与订阅调试主题的消息。
发布
#include <iostream>
#include <cstdlib>
#include <unistd.h>
#include <uavcan/uavcan.hpp>
//将使用uavcan.protocol.debug.KeyValue类型的消息来进行测试
#include <uavcan/protocol/debug/KeyValue.hpp> // uavcan.protocol.debug.KeyValue
extern uavcan::ICanDriver& getCanDriver(); //获取CAN驱动
extern uavcan::ISystemClock& getSystemClock(); //获取系统时钟
constexpr unsigned NodeMemoryPoolSize = 16384;
typedef uavcan::Node<NodeMemoryPoolSize> Node;
static Node& getNode()
{static Node node(getCanDriver(), getSystemClock());return node;
}
int main(int argc, const char** argv)
{if (argc < 2){std::cerr << "Usage: " << argv[0] << " <node-id>" << std::endl;return 1;}const int self_node_id = std::stoi(argv[1]);auto& node = getNode();node.setNodeID(self_node_id);node.setName("org.uavcan.tutorial.publisher");//启动节点const int node_start_res = node.start();if (node_start_res < 0){throw std::runtime_error("Failed to start the node; error: " + std::to_string(node_start_res));}//创建对应的消息类对象发布器uavcan::Publisher<uavcan::protocol::debug::KeyValue> kv_pub(node);const int kv_pub_init_res = kv_pub.init();if (kv_pub_init_res < 0){throw std::runtime_error("Failed to start the publisher; error: " + std::to_string(kv_pub_init_res));}//设置发布时间间隔kv_pub.setTxTimeout(uavcan::MonotonicDuration::fromMSec(1000));//设置优先级kv_pub.setPriority(uavcan::TransferPriority::MiddleLower);//运行节点node.setModeOperational();while (true){//创建进程,阻塞时间设置为1秒(1秒调用一次)const int spin_res = node.spin(uavcan::MonotonicDuration::fromMSec(1000));if (spin_res < 0){std::cerr << "Transient failure: " << spin_res << std::endl;}//创建消息实例对象uavcan::protocol::debug::KeyValue kv_msg; // Always zero initializedkv_msg.value = std::rand() / float(RAND_MAX);//设置消息kv_msg.key = "a"; // "a"kv_msg.key += "b"; // "ab"kv_msg.key += "c"; // "abc"//发布消息const int pub_res = kv_pub.broadcast(kv_msg);if (pub_res < 0){std::cerr << "KV publication failure: " << pub_res << std::endl;}}
}
订阅
#include <iostream>
#include <cstdlib>
#include <unistd.h>
#include <uavcan/uavcan.hpp>
#include <uavcan/protocol/debug/KeyValue.hpp>
#include <uavcan/protocol/debug/LogMessage.hpp>
extern uavcan::ICanDriver& getCanDriver();
extern uavcan::ISystemClock& getSystemClock();
constexpr unsigned NodeMemoryPoolSize = 16384;
typedef uavcan::Node<NodeMemoryPoolSize> Node;
static Node& getNode()
{static Node node(getCanDriver(), getSystemClock());return node;
}
int main(int argc, const char** argv)
{if (argc < 2){std::cerr << "Usage: " << argv[0] << " <node-id>" << std::endl;return 1;}const int self_node_id = std::stoi(argv[1]);auto& node = getNode();node.setNodeID(self_node_id);node.setName("org.uavcan.tutorial.subscriber");//运行节点const int node_start_res = node.start();if (node_start_res < 0){throw std::runtime_error("Failed to start the node; error: " + std::to_string(node_start_res));}/**订阅uavcan.protocol.debug.LogMessage类型的标准日志消息。*收到的消息将通过回调传递给应用程序。*回调参数的类型可以是以下两种类型之一:*-T&*-uavcan::接收数据结构<T>&*对于第一个选项,ReceivedDataStructure<T>&将隐式转换为T&。*类uavcan::ReceivedDataStructure使用从*传输层,如源节点ID、时间戳、传输ID、冗余接口的索引提取*/uavcan::Subscriber<uavcan::protocol::debug::LogMessage> log_sub(node);const int log_sub_start_res = log_sub.start([&](const uavcan::ReceivedDataStructure<uavcan::protocol::debug::LogMessage>& msg){//消息流以 YAML 格式传输std::cout << msg << std::endl;});if (log_sub_start_res < 0){throw std::runtime_error("Failed to start the log subscriber; error: " + std::to_string(log_sub_start_res));}/**订阅uavcan.protocol.debug.KeyValue类型的消息。*这一次,设置另一种类型的消息订阅,采用另一种回调参数类型*则将只是T&而不是uavcan::ReceivedDataStructure<T>&。*回调将通过std::cout(也可参考uavcan::OStream)以YAML格式打印消息。*/uavcan::Subscriber<uavcan::protocol::debug::KeyValue> kv_sub(node);const int kv_sub_start_res =kv_sub.start([&](const uavcan::protocol::debug::KeyValue& msg) { std::cout << msg << std::endl; });if (kv_sub_start_res < 0){throw std::runtime_error("Failed to start the key/value subscriber; error: " + std::to_string(kv_sub_start_res));}//运行节点node.setModeOperational();while (true){//创建线程const int res = node.spin(uavcan::MonotonicDuration::getInfinite());if (res < 0){std::cerr << "Transient failure: " << res << std::endl;}}
}
服务类型消息
以下是服务类型消息的代码示例:
服务端 ---提供固件升级 uavcan.protocol.file.BeginFirmwareUpdate 类型的服务消息。
客户端 ---在指定节点上调用相同的服务类型。服务器的节点 ID 作为 main 函数的命令行参数提供给应用程序。
服务端
#include <cstdio>
#include <iostream>
#include <unistd.h>
#include <uavcan/uavcan.hpp>
#include <uavcan/protocol/file/BeginFirmwareUpdate.hpp>
extern uavcan::ICanDriver& getCanDriver();
extern uavcan::ISystemClock& getSystemClock();
constexpr unsigned NodeMemoryPoolSize = 16384;
typedef uavcan::Node<NodeMemoryPoolSize> Node;
static Node& getNode()
{static Node node(getCanDriver(), getSystemClock());return node;
}
int main(int argc, const char** argv)
{if (argc < 2){std::cerr << "Usage: " << argv[0] << " <node-id>" << std::endl;return 1;}const int self_node_id = std::stoi(argv[1]);auto& node = getNode();node.setNodeID(self_node_id);node.setName("org.uavcan.tutorial.server");const int node_start_res = node.start();if (node_start_res < 0){throw std::runtime_error("Failed to start the node; error: " + std::to_string(node_start_res));}/**创建服务器。 此程序中,服务器只是接收请求,没有做其他的处理程序*服务回调接受两个参数:*-对请求结构(输入)的引用*-对默认初始化响应结构(输出)的引用*输入的类型可以是以下两种之一:*-T::请求&*-uavcan::ReceivedDataStructure<T::Request>&*输出的类型严格为T::Response&。*注意,对于服务数据结构,不可能实例化T本身*/using uavcan::protocol::file::BeginFirmwareUpdate;uavcan::ServiceServer<BeginFirmwareUpdate> srv(node);const int srv_start_res = srv.start([&](const uavcan::ReceivedDataStructure<BeginFirmwareUpdate::Request>& req, BeginFirmwareUpdate::Response& rsp){std::cout << req << std::endl;rsp.error = rsp.ERROR_UNKNOWN;rsp.optional_error_message = "Our sun is dying";});if (srv_start_res < 0){std::exit(1); // 错误处理}//开启节点node.setModeOperational();while (true){const int res = node.spin(uavcan::MonotonicDuration::fromMSec(1000));if (res < 0){std::printf("Transient failure: %d\n", res);}}
}
客户端
#include <iostream>
#include <unistd.h>
#include <uavcan/uavcan.hpp>
#include <uavcan/protocol/file/BeginFirmwareUpdate.hpp>
extern uavcan::ICanDriver& getCanDriver();
extern uavcan::ISystemClock& getSystemClock();
constexpr unsigned NodeMemoryPoolSize = 16384;
typedef uavcan::Node<NodeMemoryPoolSize> Node;
static Node& getNode()
{static Node node(getCanDriver(), getSystemClock());return node;
}
int main(int argc, const char** argv)
{if (argc < 3){std::cerr << "Usage: " << argv[0] << " <node-id> <server-node-id>" << std::endl;return 1;}const uavcan::NodeID self_node_id = std::stoi(argv[1]);const uavcan::NodeID server_node_id = std::stoi(argv[2]);auto& node = getNode();node.setNodeID(self_node_id);node.setName("org.uavcan.tutorial.client");const int node_start_res = node.start();if (node_start_res < 0){throw std::runtime_error("Failed to start the node; error: " + std::to_string(node_start_res));}//创建客户端using uavcan::protocol::file::BeginFirmwareUpdate;uavcan::ServiceClient<BeginFirmwareUpdate> client(node);const int client_init_res = client.init();if (client_init_res < 0){throw std::runtime_error("Failed to init the client; error: " + std::to_string(client_init_res));}//设置回调client.setCallback([](const uavcan::ServiceCallResult<BeginFirmwareUpdate>& call_result){if (call_result.isSuccessful()) // Whether the call was successful, i.e. whether the response was received{// The result can be directly streamed; the output will be formatted in human-readable YAML.std::cout << call_result << std::endl;}else{std::cerr << "Service call to node "<< static_cast<int>(call_result.getCallID().server_node_id.get())<< " has failed" << std::endl;}});//设置请求时间间隔client.setRequestTimeout(uavcan::MonotonicDuration::fromMSec(200));//设置优先级client.setPriority(uavcan::TransferPriority::OneHigherThanLowest);//调用远程服务,设置固件路径BeginFirmwareUpdate::Request request;request.image_file_remote_path.path = "/foo/bar";/* 可以使用一个客户端执行多个请求的回调* int call(NodeID server_node_id, const RequestType& request)* 初始化一个新的请求回调** int call(NodeID server_node_id, const RequestType& request, ServiceCallID& out_call_id)* 启动新的非阻塞调用并通过引用返回其ServiceCallID描述符。* 描述符允许查询呼叫进度或稍后取消呼叫。** void cancelCall(ServiceCallID call_id)* 使用描述符取消回调** void cancelAllCalls()* 取消所有回调** bool hasPendingCallToServer(NodeID server_node_id) const* 客户端对象当前是否对给定服务器有挂起的调用。** unsigned getNumPendingCalls() const* 返回当前挂起的回调总数。** bool hasPendingCalls() const* 客户端对象当前是否有任何挂起的回调。*/const int call_res = client.call(server_node_id, request);if (call_res < 0){throw std::runtime_error("Unable to perform service call: " + std::to_string(call_res));}//创建线程node.setModeOperational();while (client.hasPendingCalls()) // 是否有回调产生被挂起还未执行const int res = node.spin(uavcan::MonotonicDuration::fromMSec(10));if (res < 0){std::cerr << "Transient failure: " << res << std::endl;}}return 0;
}
时间同步
以下示例演示了如何使用 libuavcan 实现网络范围的时间同步。
包含两个应用程序:
时间同步从机 ---一个非常简单的应用程序,用于将本地时钟与网络时间同步。
时间同步主机 ---功能齐全的主机,可以与同一网络中的其他冗余主机一起工作。
时间同步中的主机逻辑稍微复杂了一些: 如果当前模块是主机的话,会同时再创建一个从机运行,这是做的一个冗余机制,当检测到网络中有更高优先级的主机时,当前节点会启用从机 (suppress(false)),之后与新主机进行同步。
从机
#include <iostream>
#include <cstdio>
#include <unistd.h>
#include <uavcan/uavcan.hpp>
/**标准应用程序级函数的实现位于uavcan/protocol/中。*同一路径还包含标准数据类型uavcan.procol.*。*/
#include <uavcan/protocol/global_time_sync_slave.hpp>
extern uavcan::ICanDriver& getCanDriver();
extern uavcan::ISystemClock& getSystemClock();
constexpr unsigned NodeMemoryPoolSize = 16384;
int main(int argc, const char** argv)
{if (argc < 2){std::cerr << "Usage: " << argv[0] << " <node-id>" << std::endl;return 1;}const int self_node_id = std::stoi(argv[1]);uavcan::Node<NodeMemoryPoolSize> node(getCanDriver(), getSystemClock());node.setNodeID(self_node_id);node.setName("org.uavcan.tutorial.time_sync_slave");const int node_start_res = node.start();if (node_start_res < 0){throw std::runtime_error("Failed to start the node; error: " + std::to_string(node_start_res));}//创建时间同步从设备 每个节点只能存在一个时间同步从设备//每次从设备能够确定时钟相位误差时,它都会调用//平台驱动程序方法 //uavcan::ISystemClock::adjustUtc(uavcan::UtcDuration adjustment)。//通常从设备每1-2秒调整一次,不过取决于主设备的广播时间uavcan::GlobalTimeSyncSlave slave(node);const int slave_init_res = slave.start();if (slave_init_res < 0){throw std::runtime_error("Failed to start the time sync slave; error: " + std::to_string(slave_init_res));}//创建线程node.setModeOperational();while (true){const int spin_res = node.spin(uavcan::MonotonicDuration::fromMSec(1000));if (spin_res < 0){std::cerr << "Transient failure: " << spin_res << std::endl;}//每秒打印一次从设备状态const bool active = slave.isActive(); //是否可以与主机进行同步const int master_node_id = slave.getMasterNodeID().get(); // 如果 (active == false),则返回无效节点const long msec_since_last_adjustment = (node.getMonotonicTime() - slave.getLastAdjustmentTime()).toMSec();std::printf("Time sync slave status:\n"" Active: %d\n"" Master Node ID: %d\n"" Last clock adjustment was %ld ms ago\n\n",int(active), master_node_id, msec_since_last_adjustment);/** 注意,libuavcan使用两种不同的时间尺度:** 1.单调时间-由类uavcan::MonotonicTime和uavcan::MonotomicDuration表示。*这个时间是稳定和单调的;它测量了一些从过去未指定的开始的时间量,它通常不会跳跃或*明显改变速率。*在Linux上,它通过clock_gettime(clock_MONOTONIC,…)访问。**2.UTC时间-由类uavcan::UtcTime和uavcan::UtcDuration表示。*这是可以(但不一定)与网络时间同步的实时时间。*这个时间不是稳定单调的,因为它可以改变速率并前后跳跃,以消除与全球网络时间的差异。*请注意,尽管它的名称是UTC,但这个时间刻度不需要严格是UTC时间,不过建议使用UTC。*在Linux上,它可以通过gettimeofday(…)访问。**这两个时钟都可以通过方法INode::getMonotonicTime()和INode::getUtcTime()访问。*注意,时间表示是类型安全的,因为不可能在同一表达式中混合UTC和单调时间(编译将失败)。*/uavcan::MonotonicTime mono_time = node.getMonotonicTime();uavcan::UtcTime utc_time = node.getUtcTime();//打印当前时间std::printf("Current time in seconds: Monotonic: %s UTC: %s\n",mono_time.toString().c_str(), utc_time.toString().c_str());//从 1234 us 开始计时,加上此时计算后的时间mono_time += uavcan::MonotonicDuration::fromUSec(1234);utc_time += uavcan::UtcDuration::fromUSec(1234);//打印从 1234 us 计时之后计算的时间std::printf("1234 usec later: Monotonic: %s UTC: %s\n",mono_time.toString().c_str(), utc_time.toString().c_str());}
}
fromUSec 函数用于设置从哪个 us 时间开始计时,即设置开始时间点。
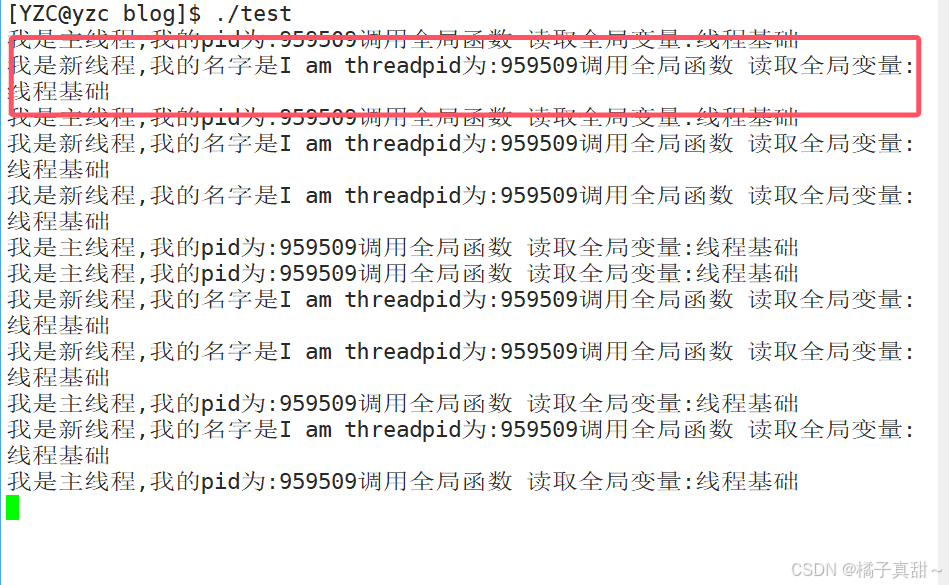
主机
#include <iostream>
#include <cstdio>
#include <unistd.h>
#include <uavcan/uavcan.hpp>
#include <uavcan/protocol/global_time_sync_master.hpp>
#include <uavcan/protocol/global_time_sync_slave.hpp>
extern uavcan::ICanDriver& getCanDriver();
extern uavcan::ISystemClock& getSystemClock();
constexpr unsigned NodeMemoryPoolSize = 16384;
int main(int argc, const char** argv)
{if (argc < 2){std::cerr << "Usage: " << argv[0] << " <node-id>" << std::endl;return 1;}const int self_node_id = std::stoi(argv[1]);uavcan::Node<NodeMemoryPoolSize> node(getCanDriver(), getSystemClock());node.setNodeID(self_node_id);node.setName("org.uavcan.tutorial.time_sync_master");const int node_start_res = node.start();if (node_start_res < 0){throw std::runtime_error("Failed to start the node; error: " + std::to_string(node_start_res));}//初始化时间同步主机,每个节点最多只能存在一个时间同步主机uavcan::GlobalTimeSyncMaster master(node);const int master_init_res = master.init();if (master_init_res < 0){throw std::runtime_error("Failed to start the time sync master; error: " + std::to_string(master_init_res));}//再创建了一个时间同步从机,这是做了一个冗余机制,如果发现总线中有优先级//更高的主机,则此节点由主机变为从机,与新主机进行同步,每个节点也最多只有//一个从机。uavcan::GlobalTimeSyncSlave slave(node);const int slave_init_res = slave.start();if (slave_init_res < 0){throw std::runtime_error("Failed to start the time sync slave; error: " + std::to_string(slave_init_res));}//创建一个定时器,每秒发布一次时间同步主题消息uavcan::Timer master_timer(node);master_timer.setCallback([&](const uavcan::TimerEvent&){//检查网络中是否由优先级更高的主机,如果有,则节点切换到从机if (slave.isActive()) // "Active" means that the slave tracks at least one remote master in the network{if (node.getNodeID() < slave.getMasterNodeID()){//当前节点是最高优先级的主机 调用 suppress 函数,压制从机模式slave.suppress(true); // SUPPRESSstd::cout << "I am the highest priority master; the next one has Node ID "<< int(slave.getMasterNodeID().get()) << std::endl;}else{//当前网络有更高优先级的主机,不再压制从机模式,slave.suppress(false); // UNSUPPRESSstd::cout << "Syncing with a higher priority master with Node ID "<< int(slave.getMasterNodeID().get()) << std::endl;}}else{//当前节点主机是唯一时钟源slave.suppress(true);std::cout << "No other masters detected in the network" << std::endl;}//发布同步消息const int res = master.publish();if (res < 0){std::cout << "Time sync master transient failure: " << res << std::endl;}});master_timer.startPeriodic(uavcan::MonotonicDuration::fromMSec(1000));//创建线程node.setModeOperational();while (true){const int spin_res = node.spin(uavcan::MonotonicDuration::getInfinite());if (spin_res < 0){std::cerr << "Transient failure: " << spin_res << std::endl;}}
}
固件升级
固件升级分两个模块,一个是升级固件模块(类比飞控),另一个是被升级模块(类比电调)。
升级固件模块 ---此模块运行活动节点监视器,当远程节点响应 uavcan.protocol.GetNodeInfo请求时,模块会检查其固件映像是否比当前运行的节点固件版本更新。如果是这种情况,应用程序会向节点发送 uavcan.protocol.file.BeginFirmwareUpdate 类型的请求。该模块还实现了文件服务器,用于固件更新过程。
被升级模块 ---响应 uavcan.protocol.file.BeginFirmwareUpdate 类型的请求,以及使用服务uavcan.propertiesfile.Read 下载文件。
升级固件模块
#include <iostream>
#include <cstdlib>
#include <cctype>
#include <vector>
#include <algorithm>
#include <unistd.h>
#include <uavcan/uavcan.hpp>
#include <uavcan/protocol/firmware_update_trigger.hpp> // uavcan::FirmwareUpdateTrigger
#include <uavcan/protocol/node_info_retriever.hpp> // uavcan::NodeInfoRetriever (see tutorial "Node discovery")
//需要使用 POSIX 标准函数
#include <uavcan_posix/basic_file_server_backend.hpp>
#include <glob.h> // POSIX glob() function
extern uavcan::ICanDriver& getCanDriver();
extern uavcan::ISystemClock& getSystemClock();/*
工作方式如下:uavcan::FirmwareUpdateTrigger通过接口 uavcan::INodeInfoListener
订阅来自 uavcan::NodeInfoRetriever 的节点信息报告。
每当 FirmwareUpdateTrigger 接收到有关新节点的信息时,它都会通过
界面 uavcan::IFirmwareVersionChecker将此信息转发给应用程序。
然后,应用程序将使用提供的信息检查节点是否需要固件更新,并将检查结果
报告回 FirmwareUpdateTrigger。如果节点需要更新,FirmwareUpdateTrigger将向其
发送请求 uavcan.protocol.file.BeginFirmwareUpdate;否则该节点将被忽略,
直到它重新启动或重新出现在总线上。如果节点未响应更新请求,FirmwareUpdateTrigger
将重试。
如果节点响应错误,FirmwareUpdateTrigger 将使用相同的接口询问应用程序是否需要重试。
*/
class ExampleFirmwareVersionChecker final : public uavcan::IFirmwareVersionChecker
{/*** 当类获得对GetNodeInfo请求的响应时,将调用此方法。* @param node_id 从中接收此GetNodeInfo响应的节点ID。* @param node_info 实际节点信息结构* @param out_firmware_file_path 通过此参数返回固件路径* 注意,必须通过uavcan.protocol.file.Read服务访问此路径。* @return True - 开始发送更新请求* False - 改节点被忽略*/bool shouldRequestFirmwareUpdate(uavcan::NodeID node_id,const uavcan::protocol::GetNodeInfo::Response& node_info,FirmwareFilePath& out_firmware_file_path)override{//需要根据输入来决定节点是否需要更新。//PX4和APM都利用libuavcan的POSIX平台驱动程序提供的类-//uavcan_posix::FirmwareVersionChecker-实现通用固件版本检查算法。//该算法的工作原理如下://1. 检查文件系统是否具有给定节点的固件文件。//2. 将给定节点的本地固件映像的CRC与该节点当前正在运行的固件的CRC进行比较//(后者可通过该方法中的节点信息参数获得)。//3. 如果CRC不匹配,则请求更新,否则不要请求更新。 std::cout << "Checking firmware version of node " << int(node_id.get()) << "; node info:\n"<< node_info << std::endl;/** 正在查找匹配的固件*/auto files = findAvailableFirmwareFiles(node_info);if (files.empty()){std::cout << "No firmware files found for this node" << std::endl;return false;}std::cout << "Matching firmware files:";for (auto x: files){std::cout << "\n\t" << x << "\n" << parseFirmwareFileName(x.c_str()) << std::endl;}/** 查找具有最高版本号的固件*/std::string best_file_name;unsigned best_combined_version = 0;for (auto x: files){const auto inf = parseFirmwareFileName(x.c_str());const unsigned combined_version = (unsigned(inf.software_version.major) << 8) + inf.software_version.minor;if (combined_version >= best_combined_version){best_combined_version = combined_version;best_file_name = x;}}std::cout << "Preferred firmware: " << best_file_name << std::endl;const auto best_firmware_info = parseFirmwareFileName(best_file_name.c_str());/** 将最新固件与实际固件进行比较,如果两者不同,才会更新*/if (best_firmware_info.software_version.major == node_info.software_version.major &&best_firmware_info.software_version.minor == node_info.software_version.minor &&best_firmware_info.software_version.vcs_commit == node_info.software_version.vcs_commit){std::cout << "Firmware is already up-to-date" << std::endl;return false;}/**固件文件路径:不得超过40个字符。*当前使用的固件文件名格式可能会导致超过长度限制,因此*通过计算哈希CRC64 并将其用作固件文件的符号链接的名称来解决。*/out_firmware_file_path = makeFirmwareFileSymlinkName(best_file_name.c_str(), best_file_name.length());(void)std::remove(out_firmware_file_path.c_str());const int symlink_res = ::symlink(best_file_name.c_str(), out_firmware_file_path.c_str());if (symlink_res < 0){std::cout << "Could not create symlink: " << symlink_res << std::endl;return false;}std::cout << "Firmware file symlink: " << out_firmware_file_path.c_str() << std::endl;return true;}/***当节点以错误响应更新请求时,将调用此方法。如果请求只是超时,则不会调用此方法。*注意,如果在响应到达时节点已被删除,则不会调用此方法。*特殊情况:如果节点以ERROR_IN_PROGRESS响应,则类将假定不再需要进一步的请求。*不会调用此方法。** @param node_id 返回错误的节点ID * @param error_response 错误响应内容* @param out_firmware_file_path 固件路径,如果需要设置新的路径,则设置,如果* 还是旧路径,则采用原来的值 * @return True - 该类将继续发送具有新固件路径的更新请求。* False - 改节点将忽略*/bool shouldRetryFirmwareUpdate(uavcan::NodeID node_id,const uavcan::protocol::file::BeginFirmwareUpdate::Response& error_response,FirmwareFilePath& out_firmware_file_path)override{/** 如果节点响应错误,则取消更新*/std::cout << "The node " << int(node_id.get()) << " has rejected the update request; file path was:\n"<< "\t" << out_firmware_file_path.c_str()<< "\nresponse was:\n"<< error_response << std::endl;return false;}/*** 当节点响应更新请求并进行确认时,将调用此节点。* @param node_id 确认请求的节点ID* @param response 实际响应*/void handleFirmwareUpdateConfirmation(uavcan::NodeID node_id,const uavcan::protocol::file::BeginFirmwareUpdate::Response& response)override{std::cout << "Node " << int(node_id.get()) << " has confirmed the update request; response was:\n"<< response << std::endl;}//计算固件的符号链接的名称static FirmwareFilePath makeFirmwareFileSymlinkName(const char* file_name, unsigned file_name_length){uavcan::DataTypeSignatureCRC hash;hash.add(reinterpret_cast<const std::uint8_t*>(file_name), file_name_length);auto hash_val = hash.get();static const char Charset[] = "0123456789abcdefghijklmnopqrstuvwxyz";static const unsigned CharsetSize = sizeof(Charset) - 1;FirmwareFilePath out;while (hash_val > 0){out.push_back(Charset[hash_val % CharsetSize]);hash_val /= CharsetSize;}out += ".bin";return out;}//从固件中提取版本信息static uavcan::protocol::GetNodeInfo::Response parseFirmwareFileName(const char* name){// 必须使用静态变量避免堆分配static const auto extract_uint8 = [](unsigned& pos, const char* name){std::uint8_t res = 0;pos++;while (std::isdigit(name[pos])){res = res * 10 + int(name[pos] - '0');pos++;}return res;};uavcan::protocol::GetNodeInfo::Response res;unsigned pos = 0;while (name[pos] != '-'){res.name.push_back(name[pos]);pos++;}res.hardware_version.major = extract_uint8(pos, name);res.hardware_version.minor = extract_uint8(pos, name);res.software_version.major = extract_uint8(pos, name);res.software_version.minor = extract_uint8(pos, name);pos++;res.software_version.vcs_commit = ::strtoul(name + pos, nullptr, 16);res.software_version.optional_field_flags = res.software_version.OPTIONAL_FIELD_FLAG_VCS_COMMIT;return res;}//返回可用于给定节点信息结构的固件文件static std::vector<std::string> findAvailableFirmwareFiles(const uavcan::protocol::GetNodeInfo::Response& info){std::vector<std::string> glob_matches;const std::string glob_pattern = std::string(info.name.c_str()) + "-" +std::to_string(info.hardware_version.major) + "." +std::to_string(info.hardware_version.minor) + "-*.uavcan.bin";auto result = ::glob_t();const int res = ::glob(glob_pattern.c_str(), 0, nullptr, &result);if (res != 0){::globfree(&result);if (res == GLOB_NOMATCH){return glob_matches;}throw std::runtime_error("Can't glob()");}for(unsigned i = 0; i < result.gl_pathc; ++i){glob_matches.emplace_back(result.gl_pathv[i]);}::globfree(&result);return glob_matches;}
};
int main(int argc, const char** argv)
{if (argc < 2){std::cerr << "Usage: " << argv[0] << " <node-id>" << std::endl;return 1;}const int self_node_id = std::stoi(argv[1]);/** 初始化节点*通常,充当固件更新器的节点还将实现动态节点ID分配器。**在大多数实际应用程序中,依赖于阻塞API的功能(例如此固件更新功能)*必须在辅助线程中实现,以便不干扰主线程的实时处理。*在该固件更新程序的情况下,干扰可能由相对密集的处理*和阻止对文件系统API的调用引起。*/uavcan::Node<16384> node(getCanDriver(), getSystemClock());node.setNodeID(self_node_id);node.setName("org.uavcan.tutorial.updater");const int node_start_res = node.start();if (node_start_res < 0){throw std::runtime_error("Failed to start the node; error: " + std::to_string(node_start_res));}/** 初始化节点信息检索器* 它将由固件版本检查器来调用*/uavcan::NodeInfoRetriever node_info_retriever(node);const int retriever_res = node_info_retriever.start();if (retriever_res < 0){throw std::runtime_error("Failed to start the node info retriever: " + std::to_string(retriever_res));}/** 初始化固件更新触发器**此类监视uavcan::NodeInfoRetriever的输出,并使用该输出决定哪些节点需要*更新固件。当检测到需要更新的节点时,该类发送服务请求*uavcan.protocol.file.BeginFirmware 更新。*/ExampleFirmwareVersionChecker checker;uavcan::FirmwareUpdateTrigger trigger(node, checker);const int trigger_res = trigger.start(node_info_retriever);if (trigger_res < 0){throw std::runtime_error("Failed to start the firmware update trigger: " + std::to_string(trigger_res));}/** 初始化文件服务器*/uavcan_posix::BasicFileServerBackend file_server_backend(node);uavcan::FileServer file_server(node, file_server_backend);const int file_server_res = file_server.start();if (file_server_res < 0){throw std::runtime_error("Failed to start the file server: " + std::to_string(file_server_res));}std::cout << "Started successfully" << std::endl;/** 创建进程,运行节点*/node.setModeOperational();while (true){const int res = node.spin(uavcan::MonotonicDuration::getInfinite());if (res < 0){std::cerr << "Transient failure: " << res << std::endl;}}
}
被升级模块
#include <iostream>
#include <cstdlib>
#include <vector>
#include <iomanip>
#include <unistd.h>
#include <uavcan/uavcan.hpp>
#include <uavcan/protocol/file/BeginFirmwareUpdate.hpp>
#include <uavcan/protocol/file/Read.hpp>
extern uavcan::ICanDriver& getCanDriver();
extern uavcan::ISystemClock& getSystemClock();
/*** 此类将从指定位置下载固件到内存*/
class FirmwareLoader : private uavcan::TimerBase
{
public:/*** 状态转换过程* 正在进行 ---[后台工作中]----> 成功* \ --> 失败*/enum class Status{InProgress,Success,Failure};
private:const uavcan::NodeID source_node_id_;const uavcan::protocol::file::Path::FieldTypes::path source_path_;std::vector<std::uint8_t> image_;typedef uavcan::MethodBinder<FirmwareLoader*,void (FirmwareLoader::*)(const uavcan::ServiceCallResult<uavcan::protocol::file::Read>&)>ReadResponseCallback;uavcan::ServiceClient<uavcan::protocol::file::Read, ReadResponseCallback> read_client_;Status status_ = Status::InProgress;void handleTimerEvent(const uavcan::TimerEvent&) final override{if (!read_client_.hasPendingCalls()){uavcan::protocol::file::Read::Request req;req.path.path = source_path_;req.offset = image_.size();const int res = read_client_.call(source_node_id_, req);if (res < 0){std::cerr << "Read call failed: " << res << std::endl;}}}void handleReadResponse(const uavcan::ServiceCallResult<uavcan::protocol::file::Read>& result){if (result.isSuccessful() &&result.getResponse().error.value == 0){auto& data = result.getResponse().data;image_.insert(image_.end(), data.begin(), data.end());if (data.size() < data.capacity()) // Termination condition{status_ = Status::Success;uavcan::TimerBase::stop();}}else{status_ = Status::Failure;uavcan::TimerBase::stop();}}
public:/*** 创建对象后开始下载* 销毁对象可以取消进程*/FirmwareLoader(uavcan::INode& node,uavcan::NodeID source_node_id,const uavcan::protocol::file::Path::FieldTypes::path& source_path) :uavcan::TimerBase(node),source_node_id_(source_node_id),source_path_(source_path),read_client_(node){image_.reserve(1024); // 任意值/** 响应优先级等于请求优先级* 通常情况下,文件 IO 执行的优先级应设置得非常低*/read_client_.setPriority(uavcan::TransferPriority::OneHigherThanLowest);read_client_.setCallback(ReadResponseCallback(this, &FirmwareLoader::handleReadResponse));/** 设置频率进行限速*/uavcan::TimerBase::startPeriodic(uavcan::MonotonicDuration::fromMSec(200));}/*** 此函数可以用于检测是否完成下载*/Status getStatus() const { return status_; }/*** 返回下载的固件镜像*/const std::vector<std::uint8_t>& getImage() const { return image_; }
};
/*** This function is used to display the downloaded image.*/
template <typename InputIterator>
void printHexDump(InputIterator begin, const InputIterator end)
{struct RAIIFlagsSaver{const std::ios::fmtflags flags_ = std::cout.flags();~RAIIFlagsSaver() { std::cout.flags(flags_); }} _flags_saver;static constexpr unsigned BytesPerRow = 16;unsigned offset = 0;std::cout << std::hex << std::setfill('0');do{std::cout << std::setw(8) << offset << " ";offset += BytesPerRow;{auto it = begin;for (unsigned i = 0; i < BytesPerRow; ++i){if (i == 8){std::cout << ' ';}if (it != end){std::cout << std::setw(2) << unsigned(*it) << ' ';++it;}else{std::cout << " ";}}}std::cout << " ";for (unsigned i = 0; i < BytesPerRow; ++i){if (begin != end){std::cout << ((unsigned(*begin) >= 32U && unsigned(*begin) <= 126U) ? char(*begin) : '.');++begin;}else{std::cout << ' ';}}std::cout << std::endl;}while (begin != end);
}
int main(int argc, const char** argv)
{if (argc < 2){std::cerr << "Usage: " << argv[0] << " <node-id>" << std::endl;return 1;}const int self_node_id = std::stoi(argv[1]);/** 初始化节点* 软件版本与硬件版本在固件更新中至关重要*/uavcan::Node<16384> node(getCanDriver(), getSystemClock());node.setNodeID(self_node_id);node.setName("org.uavcan.tutorial.updatee");uavcan::protocol::HardwareVersion hwver; // TODO initialize correct valueshwver.major = 1;node.setHardwareVersion(hwver);uavcan::protocol::SoftwareVersion swver; // TODO initialize correct valuesswver.major = 1;node.setSoftwareVersion(swver);const int node_start_res = node.start();if (node_start_res < 0){throw std::runtime_error("Failed to start the node; error: " + std::to_string(node_start_res));}/** 固件下载的存储对象*/uavcan::LazyConstructor<FirmwareLoader> fw_loader;/** 初始化 BeginFirmwareUpdate 服务.*/uavcan::ServiceServer<uavcan::protocol::file::BeginFirmwareUpdate> bfu_server(node);const int bfu_res = bfu_server.start([&fw_loader, &node](const uavcan::ReceivedDataStructure<uavcan::protocol::file::BeginFirmwareUpdate::Request>& req,uavcan::protocol::file::BeginFirmwareUpdate::Response resp){std::cout << "Firmware update request:\n" << req << std::endl;if (fw_loader.isConstructed()){resp.error = resp.ERROR_IN_PROGRESS;}else{const auto source_node_id = (req.source_node_id == 0) ? req.getSrcNodeID() : req.source_node_id;fw_loader.construct<uavcan::INode&, uavcan::NodeID, decltype(req.image_file_remote_path.path)>(node, source_node_id, req.image_file_remote_path.path);}std::cout << "Response:\n" << resp << std::endl;});if (bfu_res < 0){throw std::runtime_error("Failed to start the BeginFirmwareUpdate server: " + std::to_string(bfu_res));}/** 运行节点(后台运行)*/while (true){if (fw_loader.isConstructed()){node.setModeSoftwareUpdate();if (fw_loader->getStatus() != FirmwareLoader::Status::InProgress){if (fw_loader->getStatus() == FirmwareLoader::Status::Success){auto image = fw_loader->getImage();std::cout << "Firmware download succeeded [" << image.size() << " bytes]" << std::endl;printHexDump(std::begin(image), std::end(image));// TODO: save the firmware image somewhere.}else{std::cout << "Firmware download failed" << std::endl;// TODO: handle the error, e.g. retry download, send a log message, etc.}fw_loader.destroy();}}else{node.setModeOperational();}const int res = node.spin(uavcan::MonotonicDuration::fromMSec(500));if (res < 0){std::cerr << "Transient failure: " << res << std::endl;}}
}相关文章:
PX4中的DroneCAN的实现库Libuavcan及基础功能示例
简介 Libuavcan是一个用C编写的可移植的跨平台库,对C标准库的依赖小。它可以由几乎任何符合标准的C编译器编译,并且可以在几乎任何体系结构/OS上使用。 在 DroneCAN 中,Libuavcan 有一个 DSDL 编译器,将 DSDL 文件转换为 hpp 头…...

Hot 3D 人体姿态估计 HPE Demo复现过程
视频讲解 Hot 3D 人体姿态估计 HPE Demo复现过程 标题:Hourglass Tokenizer for Efficient Transformer-Based 3D Human Pose Estimation论文地址:https://arxiv.org/abs/2311.12028代码地址:https://github.com/NationalGAILab/HoT 使用con…...
Linux操作系统6- 线程1(线程基础,调用接口,线程优缺点)
上篇文章:Linux操作系统5- 补充知识(可重入函数,volatile关键字,SIGCHLD信号)-CSDN博客 本篇Gitee仓库:myLerningCode/l27 橘子真甜/Linux操作系统与网络编程学习 - 码云 - 开源中国 (gitee.com) 目录 一.…...

每周一个网络安全相关工具——MetaSpLoit
一、Metasploit简介 Metasploit(MSF)是一款开源渗透测试框架,集成了漏洞利用、Payload生成、后渗透模块等功能,支持多种操作系统和硬件平台。其模块化设计(如exploits、auxiliary、payloads等)使其成为全球…...

MAC-禁止百度网盘自动升级更新
通过终端禁用更新服务(推荐) 此方法直接移除百度网盘的自动更新组件,无需修改系统文件。 步骤: 1.关闭百度网盘后台进程 按下 Command + Space → 输入「活动监视器」→ 搜索 BaiduNetdisk 或 UpdateAgent → 结束相关进程。 2.删除自动更新配置文件 打开终端…...

【C语言】自定义类型:结构体,联合,枚举(上)
前言:在C语言中除了我们经常使用的数据(int,float,double类型)等这些类型以外,还有一种类型就是自定义类型,它包括结构体,联合体,枚举类型。为什么要有这种自定义类型呢?假设我们想描…...

SQLiteStudio:一款免费跨平台的SQLite管理工具
SQLiteStudio 是一款专门用于管理和操作 SQLite 数据库的免费工具。它提供直观的图形化界面,简化了数据库的创建、编辑、查询和维护,适合数据库开发者和数据分析师使用。 功能特性 SQLiteStudio 提供的主要功能包括: 免费开源,可…...
配置参数说明)
Mysql配置文件My.cnf(my.ini)配置参数说明
一、my.cnf 配置文件路径:/etc/my.cnf,在调整了该文件内容后,需要重启mysql才可生效。 1、主要参数 basedir path # 使用给定目录作为根目录(安装目录)。 datadir path # 从给定目录读取数据库文件。 pid-file filename # 为mysq…...

聊天模型集成指南
文章目录 聊天模型集成指南Anthropic聊天模型集成PaLM2聊天模型PaLM2API的核心功能OpenAl聊天模型集成聊天模型集成指南 随着GPT-4等大语言模型的突破,聊天机器人已经不仅仅是简单的问答工具,它们现在广泛应用于客服、企业咨询、电子商务等多种场景,为用户提供准确、快速的反…...

搭建农产品管理可视化,助力农业智能化
利用图扑 HT 搭建农产品管理可视化平台,实现从生产到销售的全流程监控。平台通过物联网传感器实时采集土壤湿度、温度、光照等数据,支持智慧大棚的灌溉、施肥、病虫害防治等功能。同时,农产品调度中心大屏可展示市场交易数据、库存状态、物流…...

tee命令
tee 是一个在 Unix/Linux 系统中常用的命令,它用于读取标准输入(stdin),并将其内容同时输出到标准输出(stdout)和文件中。它常用于将命令的输出保存到文件的同时,也显示在终端屏幕上。 基本语法…...

国自然面上项目|基于海量多模态影像深度学习的肝癌智能诊断研究|基金申请·25-03-07
小罗碎碎念 今天和大家分享一个国自然面上项目,执行年限为2020.01~2023.12,直接费用为65万元。 该项目旨在利用多模态医学影像,通过深度学习技术,解决肝癌诊断中的难题,如影像的快速配准融合、海量特征筛选…...

「勾芡」和「淋明油」是炒菜收尾阶段提升菜品口感和观感的关键操作
你提到的「勾芡」和「淋明油」是炒菜收尾阶段提升菜品口感和观感的关键操作,背后涉及食品科学中的物理化学变化。以下从原理到实操的深度解析: 一、勾芡:淀粉的“精密控温游戏” 1. 科学原理 淀粉糊化(Gelatinization࿰…...

ROS云课三分钟-差动移动机器人导航报告如何撰写-及格边缘疯狂试探
提示词:基于如上所有案例并结合roslaunch teb_local_planner_tutorials robot_diff_drive_in_stage.launch和上面所有对话内容,设计一个差速移动机器人仿真实验,并完成报告的全文撰写。 差速移动机器人导航仿真实验报告 一、实验目的 验证 T…...

应用案例 | 精准控制,高效运行—宏集智能控制系统助力SCARA机器人极致性能
概述 随着工业4.0的深入推进,制造业对自动化和智能化的需求日益增长。传统生产线面临空间不足、效率低下、灵活性差等问题,尤其在现有工厂改造项目中,如何在有限空间内实现高效自动化成为一大挑战。 此次项目的客户需要在现有工厂基础上进行…...
蓝桥备赛(16)- 树
一、树的概念 1.1 树的定义 1)树型结构(一对多)是⼀类重要的非线性数据结构 2 )有⼀个特殊的结点,称为根结点,根结点没有前驱结点 3)除了根节点外 , 其余结点被分成 M(M…...
黑马测试mysql基础学习
视频来源:软件测试工程师所需的MySQL数据库技术,mysql系统精讲课后练习_哔哩哔哩_bilibili 环境准备: 虚拟机Linux服务器安装mysql数据库。本机安装Navicat。使Navicat连接虚拟机的数据库。(麻烦一点的是Navicat连接虚拟机的数据…...

ROS2-话题学习
强烈推荐教程: 《ROS 2机器人开发从入门到实践》3.2.2订阅小说并合成语音_哔哩哔哩_bilibili 构建功能包 # create package demo_python_pkg ros2 pkg create --build-type ament_python --license Apache-2.0 demo_python_pkg 自己写的代码放在./demo_python_pkg/…...

C++指针的基本认识
1.数组做函数参数 首先,所有传递给函数的参数都是通过传值方式进行的,传递给函数的都是参数的一份拷贝。 接着,当传递的参数是一个指向某个变量的指针时,函数将对该指针执行间接访问操作(拷贝指针,并访问所指向的内容),则函数就可以修改指向的变量。 2.一维数组 数组名…...

TypeScript系列06-模块系统与命名空间
1. ES 模块与 CommonJS 互操作性 1.1 模块解析策略 TypeScript 提供多种模块解析策略,每种策略针对不同的运行环境和开发场景优化: // tsconfig.json {"compilerOptions": {"moduleResolution": "node16", // 或 "…...

Python基础语法:常用内置函数
round():四舍五入 # 省略 ndigits print(round(3.14)) # 输出 3(int) print(round(3.66)) # 输出 4# 指定 ndigits print(round(3.14159, 2)) # 输出 3.14(float) print(round(3.666, 2)) # 输出 3.67# …...

3分钟掌握HashCalculator:你的文件完整性守护专家
3分钟掌握HashCalculator:你的文件完整性守护专家 【免费下载链接】HashCalculator 哈希值计算工具,批量计算/批量校验/查找重复文件/改变哈希值等,支持集成到系统右键菜单 项目地址: https://gitcode.com/gh_mirrors/ha/HashCalculator …...

终极键盘重映射解决方案:3分钟实现职业级游戏操作精度
终极键盘重映射解决方案:3分钟实现职业级游戏操作精度 【免费下载链接】socd Key remapper for epic gamers 项目地址: https://gitcode.com/gh_mirrors/so/socd 在激烈的游戏对抗中,你是否曾因键盘按键冲突而错失关键操作?当同时按下…...

基于雷达与光敏传感器的低功耗智能窗防设备设计与实现
1. 项目概述:一个基于雷达与光敏的智能窗防设备几年前,我因为一次短暂的出差,家里空置了几天,回来后就一直琢磨着怎么给家里的窗户加点“动静”。市面上的智能安防摄像头固然好,但要么需要复杂的布线,要么云…...

3分钟解锁网易云音乐NCM文件:ncmdumpGUI小白也能懂的完整教程
3分钟解锁网易云音乐NCM文件:ncmdumpGUI小白也能懂的完整教程 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 你是否曾经下载了网易云音乐的歌曲&a…...

ShrinkBox后门攻击:如何让自动驾驶模型“看错”距离,威胁ML-ADAS安全
1. 项目概述在自动驾驶和高级驾驶辅助系统(ADAS)领域,基于机器学习的目标检测模型,如YOLO系列,已成为感知环境、实现碰撞预警的核心组件。这些模型通过实时识别和定位道路上的车辆、行人等目标,为后续的距离…...

如何快速上手Redux Dynamic Modules:5分钟完成Redux模块化改造
如何快速上手Redux Dynamic Modules:5分钟完成Redux模块化改造 【免费下载链接】redux-dynamic-modules Modularize Redux by dynamically loading reducers and middlewares. 项目地址: https://gitcode.com/gh_mirrors/re/redux-dynamic-modules Redux Dyn…...

AutoPentest:面向红队的渗透测试决策引擎架构解析
1. 这不是又一个“自动化扫描器”,而是一套能替你做决策的渗透测试工作流引擎AutoPentest这个名字,第一眼容易让人联想到Nmap加个for循环、或者Burp Suite里点几下Intruder——但实际用过的人很快会意识到:它根本不在同一个维度上。我第一次在…...

Taotoken的Token Plan套餐如何帮助项目更可控地预估成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken的Token Plan套餐如何帮助项目更可控地预估成本 对于项目管理者或独立开发者而言,在集成大模型能力时…...

3步开启Windows 11安卓应用新体验:WSA完整使用指南
3步开启Windows 11安卓应用新体验:WSA完整使用指南 【免费下载链接】WSA Developer-related issues and feature requests for Windows Subsystem for Android 项目地址: https://gitcode.com/gh_mirrors/ws/WSA Windows Subsystem for Android(简…...