ROS开发之如何使用RPLidar A1二维激光雷达?
文章目录
- 0.引言
- 1.创建工作空间
- 2.获取rplidar_ros包并编译
- 3.检查雷达端口
- 4.启动launch显示雷达扫描结果
0.引言
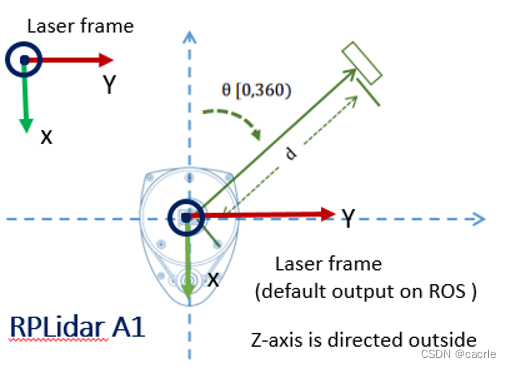
笔者研究课题涉及多传感器融合,除了前期对ROS工具的学习,还需要用雷达获取数据,进行点云处理。虽然激光雷达已经应用很广泛,但在一些专门的测量领域还需要改进设备才能应用,结合消费级的二维激光雷达和其他传感器建立对象的三维模型,并进行变形分析。本文介绍雷达的使用,RPLIDAR是低成本的二维雷达解决方案,由SlamTec公司的RoboPeak团队开发,本次学习采用RPLidar A1型号激光雷达,它能扫描360°,6米半径的范围它适合用于构建地图,SLAM,和建立3D模型,其固定方案如下如:
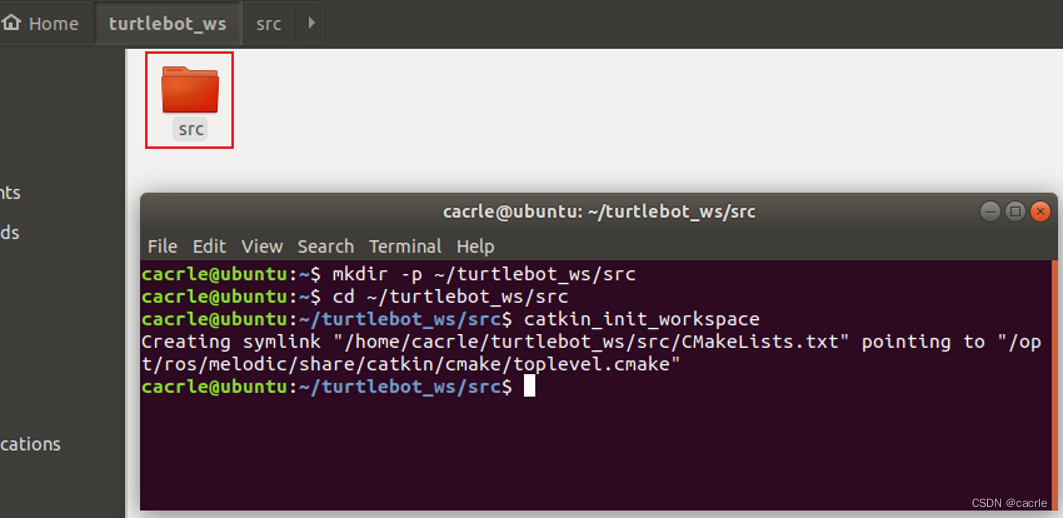
1.创建工作空间
mkdir -p ~/turtlebot_ws/src
cd ~/turtlebot_ws/src
catkin_init_workspace
2.获取rplidar_ros包并编译
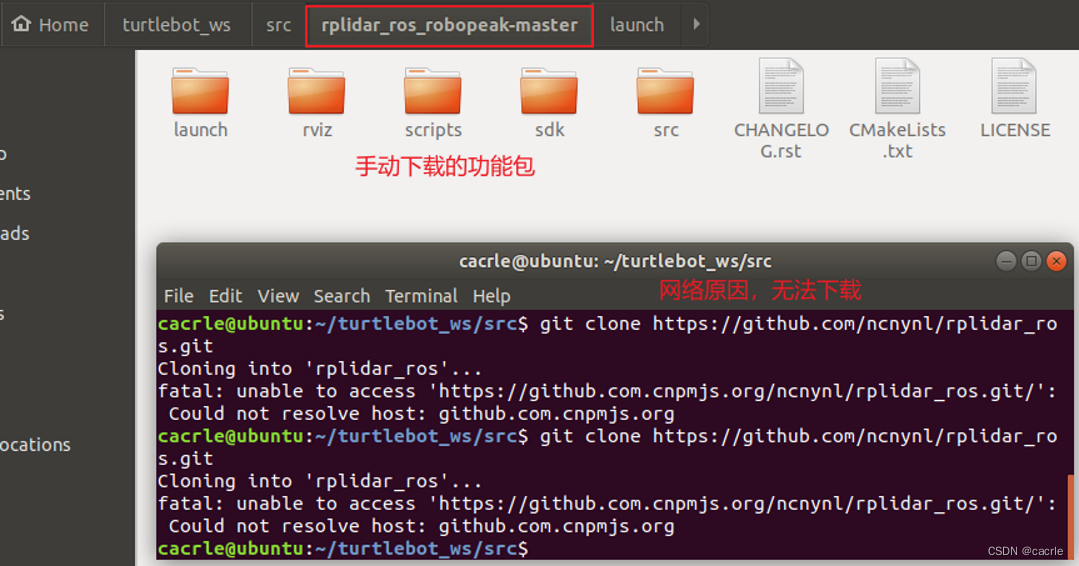
cd ~/turtlebot_ws/src
//下载rplidar_ros包
git clone [https://github.com/ncnynl/rplidar_ros.git](https://github.com/ncnynl/rplidar_ros.git)
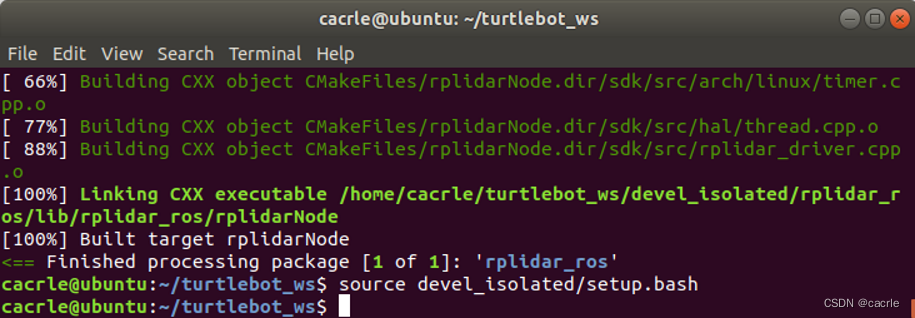
cd ~/turtlebot_ws
catkin_make
或
catkin_make_isolated
source devel/setup.bash
或
source devel_isolated/setup.bash
注:有时因网络原因,可能下载不了ros包,可以换手机wifi尝试,若wifi也无法下载,可以根据地址:https://github.com/ncnynl/rplidar_ros.git,手动下载,并将功能包放入src目录下。本文使用手动下载。
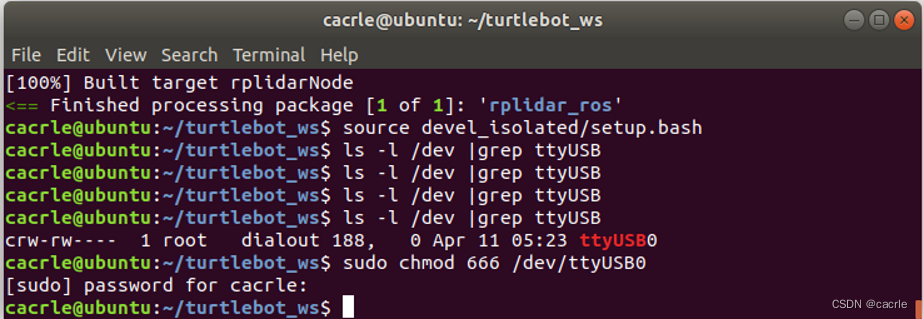
3.检查雷达端口
ls -l /dev |grep ttyUSB
sudo chmod 666 /dev/ttyUSB0
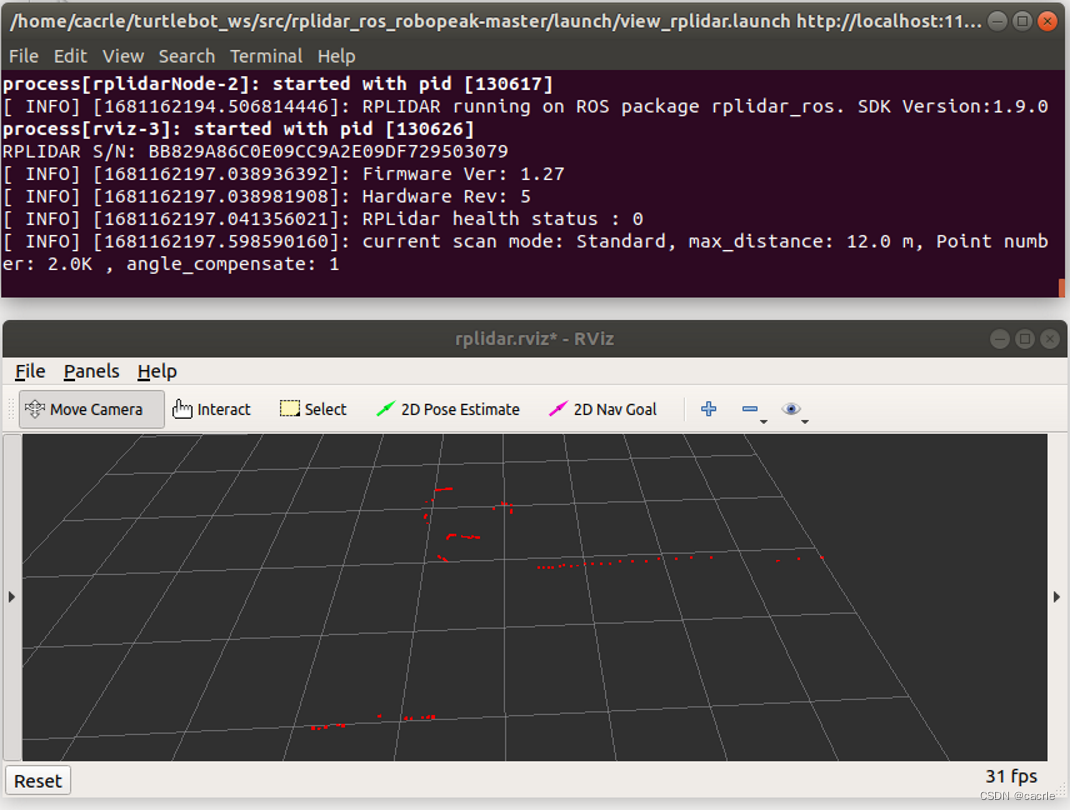
4.启动launch显示雷达扫描结果
cd ~/turtlebot_ws
source devel/setup.bash
或
source devel_isolated/setup.bash
roslaunch rplidar_ros view_rplidar.launch
参考资料:
[1] Eric_奋斗. [ROS学习笔记]ROS中使用激光雷达(RPLIDAR); 2018-01-23 [accessed 2023-04-11].
[2] Irving.Gao. ROS——树莓派4B使用思岚A1激光雷达和乐视深度相机; 2021-02-24 [accessed 2023-04-11].
[3] Eric_奋斗. [ROS学习笔记]ROS中使用激光雷达(RPLIDAR); 2018-01-23 [accessed 2023-04-11].
[4] nomil9. 树莓派&ROS:驱动EAI的激光雷达YDLIDAR-X4; 2018-12-03 [accessed 2023-04-11].
[5] Eric_奋斗. ROS学习笔记——先锋机器人P3-DX 的连接与控制; 2018-01-22 [accessed 2023-04-11].
[6] 星辰和大海都需要门票. rplidar的安装与使用; 2020-08-04 [accessed 2023-04-11].
[7] zkk9527. Rplidar 报错提示:Error, operation time out. RESULT_OPERATION_TIMEOUT!; 2020-10-20 [accessed 2023-04-11].
[8] 五月-Amber. 解决:minicom: can not open /dev/USB0:没有那个文件或目录; 2018-09-24 [accessed 2023-04-11].
[9] WisdomXLH. RPlidar(一)——雷达试用; 2018-06-02 [accessed 2023-04-11].
[10] 银时大魔王. 激光雷达初体验 - Ubuntu 18.04 + 思岚科技 RPLIDAR A1M8 + hector_slam 建图; 2020-09-11 [accessed 2023-04-11].
[11] 俊俊岑. 思岚rplidar A1激光点云数据读取; 2019-10-16 [accessed 2023-04-11].
[12] dori_z. ros中rviz查看激光雷达数据 hokuyo; 2019-08-22 [accessed 2023-04-11].
[13] TensorME. RVIZ中的fixed frame选项以及“For frame [XX]: Fixed Frame [map] does not exist”; 2019-01-20 [accessed 2023-04-11].
相关文章:
ROS开发之如何使用RPLidar A1二维激光雷达?
文章目录0.引言1.创建工作空间2.获取rplidar_ros包并编译3.检查雷达端口4.启动launch显示雷达扫描结果0.引言 笔者研究课题涉及多传感器融合,除了前期对ROS工具的学习,还需要用雷达获取数据,进行点云处理。虽然激光雷达已经应用很广泛&#x…...
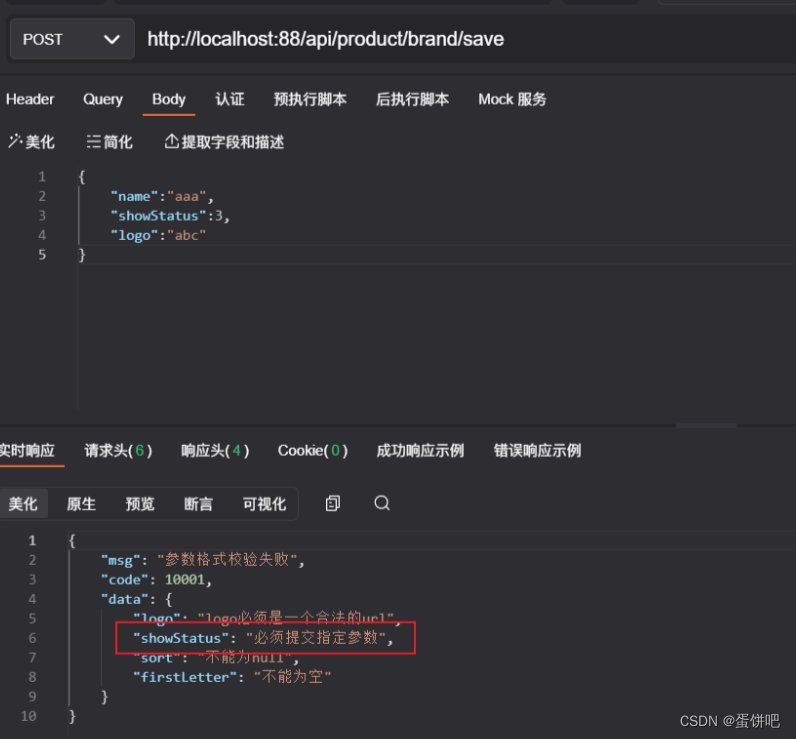
【谷粒商城之JSR303数据校验和集中异常处理】
本笔记内容为尚硅谷谷粒商城JSR303数据校验和集中异常处理部分 目录 一、简介 二、SR303数据校验使用步骤 1、引入依赖 2、给参数对象添加校验注解 常见的注解 3、接口参数前增加Valid 开启校验 三、异常的统一处理 四、分组解决校验 1、创建Groups 2、添加分组 …...
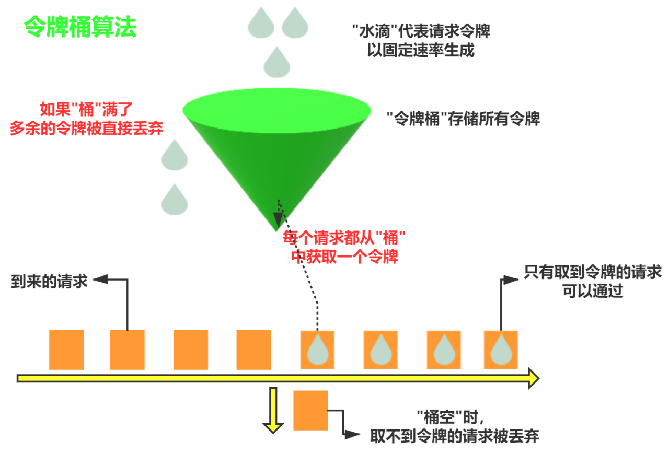
限流算法(计数器、滑动时间窗口、漏斗、令牌)原理以及代码实现
文章目录前言1、计数器(固定时间窗口)算法原理代码实现存在的问题2、滑动时间窗口算法原理代码实现存在的问题3、漏桶算法原理代码实现存在的问题4、令牌桶算法原理代码实现最后本文会对这4个限流算法进行详细说明,并输出实现限流算法的代码示…...

C++回溯算法---图的m着色问题01
C回溯算法---图的m着色问题 图的m着色问题是指给定一个图以及m种不同的颜色,尝试将每个节点涂上其中一种颜色,使得相邻的节点颜色不相同。这个问题可以转化为在解空间树中寻找可行解的问题,其中每个分支结点都有m个儿子结点,最底层…...
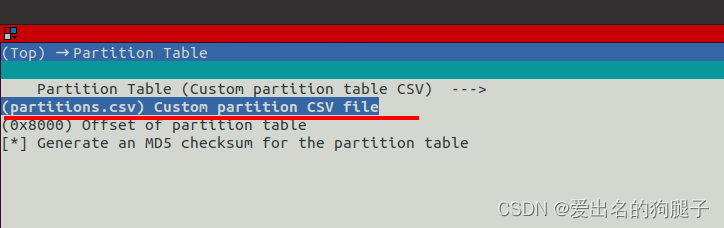
ESP32 分区表
ESP32 分区表 1. 分区表概述 ESP32 针对 flash 进行划分,划分为不同的区域用作不同的功能,并在flash的 0x8000 位置处烧写了一张分区表用来描述分区信息。 分区表可以根据自己的需要进行配置,每一个分区都有其特定的作用,可根据…...

JJJ-2 init_IRQ
void __init init_IRQ(void) {int ret;if (IS_ENABLED(CONFIG_OF) && !machine_desc->init_irq)irqchip_init();else // init_irq成员定义为imx6ul_init_irq,会走这个分支machine_desc->init_irq(); if (IS_ENABLED(CONFIG_OF) && IS_ENABLED…...

【NLP实战】基于Bert和双向LSTM的情感分类【下篇】
文章目录前言简介第一部分关于pytorch lightning保存模型的机制关于如何读取保存好的模型完善测试代码第二部分第一次训练出的模型的过拟合问题如何解决过拟合后记前言 本文涉及的代码全由博主自己完成,可以随意拿去做参考。如对代码有不懂的地方请联系博主。 博主…...
程序设计方法学
体育竞技分析 问题分析 体育竞技分析 需求:毫厘是多少? 如何科学分析体育竞技比赛? 输入:球员的水平 输出:可预测的比赛成绩 体育竞技分析:模拟N场比赛 计算思维:抽象 自动化 模拟&am…...

Hadoop之Yarn篇
目录 编辑 Yarn的工作机制: 全流程作业: Yarn的调度器与调度算法: FIFO调度器(先进先出): 容量调度器(Capacity Scheduler): 容量调度器资源分配算法࿱…...

Spring Cloud Nacos使用总结
目录 安装Nacos服务器 服务发现与消费 服务发现与消费-添加依赖 服务发现-配置文件 服务发现-注解 服务发现-Controller 服务消费-配置文件 服务消费-注解与Ribbon消费代码 服务消费-运行 配置管理 配置管理-添加依赖 配置管理-配置文件 配置管理-注解 配置管理-…...
目标检测框架yolov5环境搭建
目前,目标检测框架中,yolov5 是很火的,它基于pytorch框架,集成opencv等框架,项目地址:https://github.com/ultralytics/yolov5,对我来说,机器学习、深度学习才开始接触,本…...
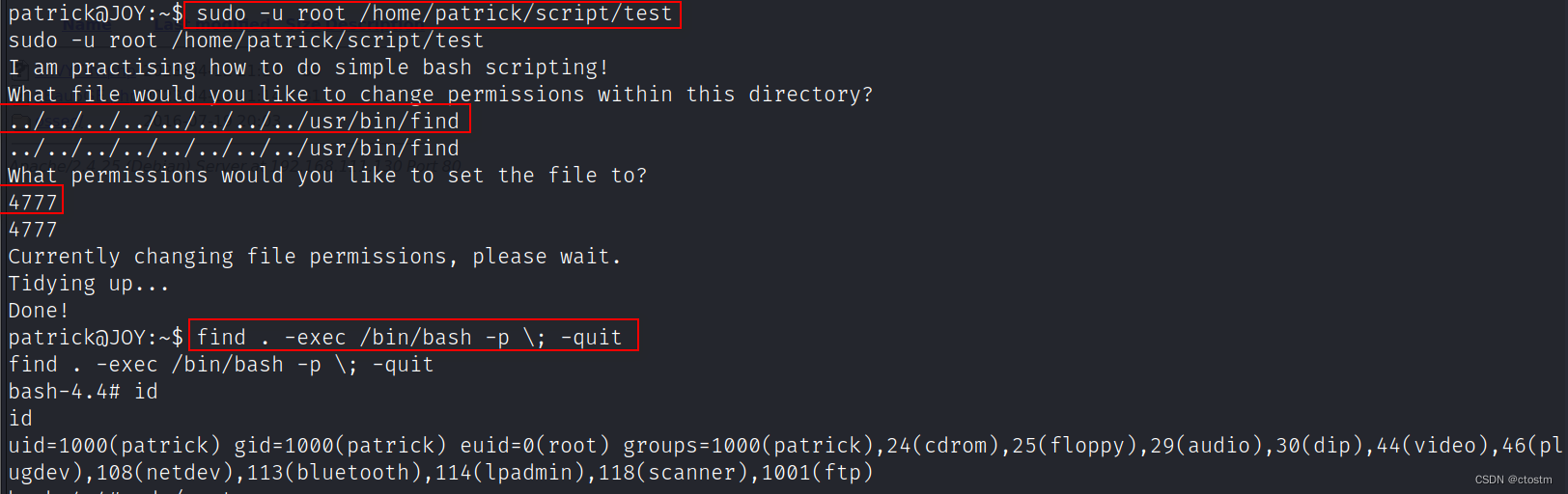
Vulnhub:Digitalworld.local (JOY)靶机
kali:192.168.111.111 靶机:192.168.111.130 信息收集 端口扫描 nmap -A -v -sV -T5 -p- --scripthttp-enum 192.168.111.130 使用enum4linux枚举目标smb服务,发现两个系统用户 enum4linux -a 192.168.111.130 ftp可以匿名登陆ÿ…...
STL源码剖析-六大部件, 部件的关系,复杂度, 区间表示
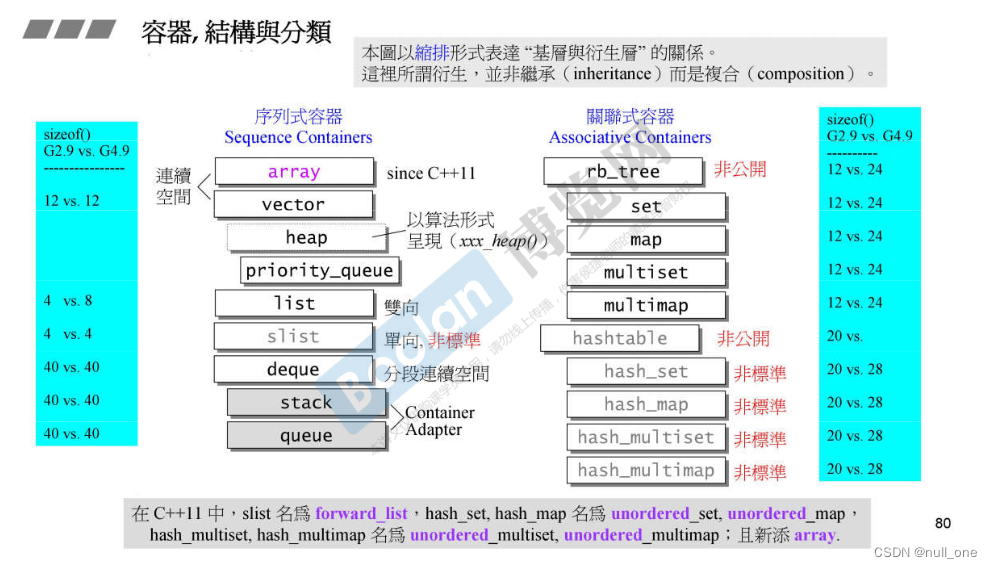
C标准库-体系结构与内核分析 根据源代码来分析 介绍 自学C侯捷老师的STL源码剖析的个人笔记,方便以后进行学习,查询。 为什么要学STL?按侯捷老师的话来说就是:使用一个东西,却不明白它的道理,不高明&…...

总有一个可用的连接,metaIPC1.2进入智能连接新时代
概述 metaIPC有1.0和2.0两个产品系列,2.0版本是可视对讲IPC,1.0新版本1.2在全面兼容ICE规范基础上进行了扩展,使metaIPC1.2进入智能化连接新时代。 metaIPC1.2在host/stun/turn/srs/zlm/janus/freeswitch等p2p/sfu/mcu进行全方位连通测试&a…...

棋盘问题c
在一个给定形状的棋盘(形状可能是不规则的)上面摆放棋子,棋子没有区别。要求摆放时任意的两个棋子不能放在棋盘中的同一行或者同一列,请编程求解对于给定形状和大小的棋盘,摆放k个棋子的所有可行的摆放方案C。 Input …...

华纳云:Linux系统下怎么创建普通用户并更改用户组
本篇内容主要讲解“Linux系统下怎么创建普通用户并更改用户组”,感兴趣的朋友不妨来看看。本文介绍的方法操作简单快捷,实用性强。下面就让小编来带大家学习“Linux系统下怎么创建普通用户并更改用户组”吧! 要求 项目做权限管理,不用root部…...

「她时代」背后的欧拉力量
2018年大热电视剧《北京女子图鉴》,讲述了一群在北京打拼的职业女性,她们背井离乡,被现实包裹,被压力、责任困扰,但依旧用倔强的个性、不屈的进取心和深厚的知识技能努力营造、交织出一片励志的天空,既激昂…...

kubespray v2.21.0 在线部署 kubernetes v1.24.0 集群【2】
文章目录创建 虚拟机模板虚拟机名称配置静态地址配置代理yum 配置配置主机名安装 git安装 docker安装 ansible配置内核参数安装 k8s定制安装新增节点配置主机名配置代理配置互信更新 inventory报错kubespray v2.21.0 部署 kubernetes v1.24.0 集群 【1】在 Rocky linux 8.7 使用…...

聚焦运营商信创运维,美信时代监控易四大亮点值得一试!
2021年11月《“十四五”信息通信行业发展规划》提出,到2025年,我国将建立高速泛在、集成互联、智能绿色、安全可靠的新型数字基础设施体系。 此《规划》让我国运营商信创进一步加速,中国移动、中国电信、中国联通等都先后加入信创大军&#x…...

[python刷题模板] 博弈入门-记忆化搜索/dp/打表
[python刷题模板] 博弈入门-记忆化搜索/dp/打表 一、 算法&数据结构1. 描述2. 复杂度分析3. 常见应用4. 常用优化二、 模板代码1. 打表贪心的博弈2. 464. 我能赢吗3. Nim游戏--最最基础版n1。三、其他四、更多例题五、参考链接一、 算法&数据结构 1. 描述 博弈一直没…...

JavaQuestPlayer终极指南:5大核心功能让你的QSP游戏开发与运行变得简单高效
JavaQuestPlayer终极指南:5大核心功能让你的QSP游戏开发与运行变得简单高效 【免费下载链接】JavaQuestPlayer 项目地址: https://gitcode.com/gh_mirrors/ja/JavaQuestPlayer 还在为QSP游戏的跨平台兼容性而烦恼吗?还在为游戏开发调试效率低下而…...
)
告别Python依赖!用SpringBoot+LangChain4j从零搭建企业级RAG知识库(附避坑指南)
告别Python依赖!用SpringBootLangChain4j从零搭建企业级RAG知识库(附避坑指南) 在AI技术快速落地的今天,检索增强生成(RAG)已成为企业知识管理的热门解决方案。然而,当大多数团队都在Python生态…...

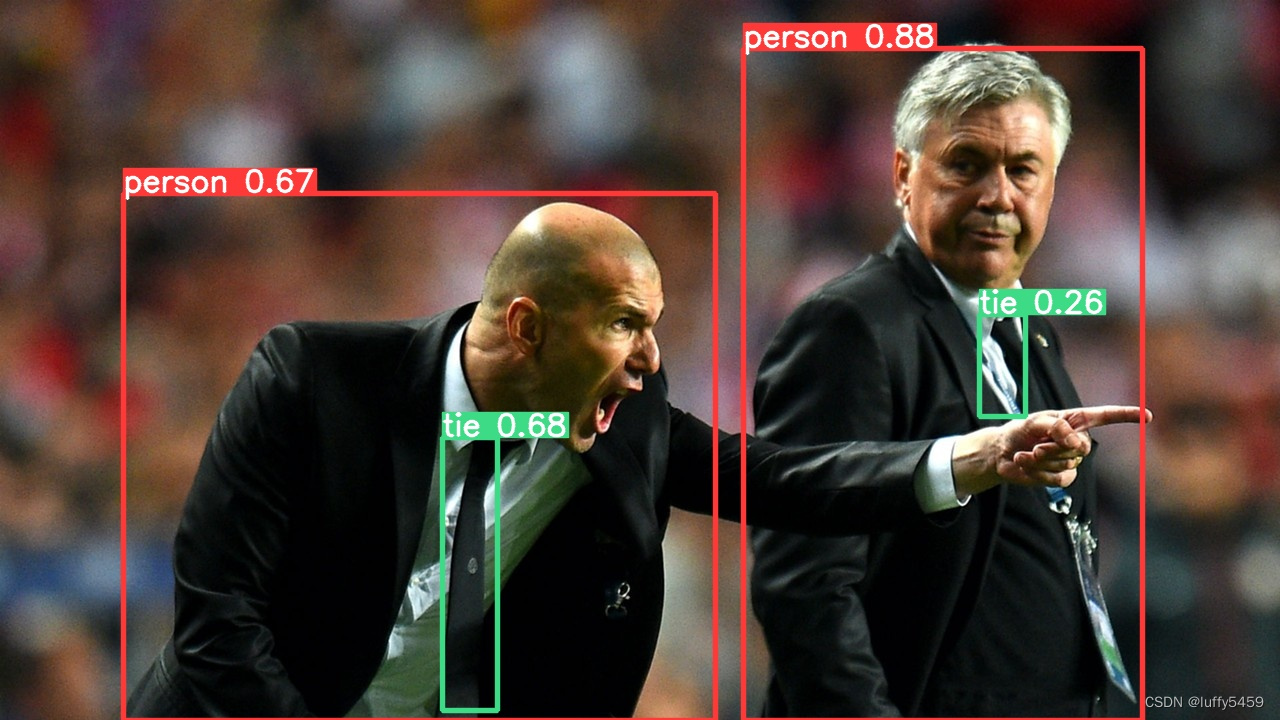
YOLOv5-6.1单通道图像训练实战:从代码修改到ONNX模型转换全解析
1. 为什么需要单通道图像训练? 在工业视觉和医学影像领域,我们经常会遇到单通道图像数据。比如X光片、红外热成像图、工业CT扫描结果等,这些图像通常都是灰度图,只包含亮度信息而没有颜色信息。传统的YOLOv5默认处理的是三通道RGB…...
)
用8086汇编和8255芯片,手把手带你复刻一个80年代的键盘显示器(含完整代码与接线图)
用8086汇编和8255芯片复刻80年代键盘显示器:一场穿越时空的硬件考古 在数字技术飞速发展的今天,回望上世纪80年代的计算机硬件,就像打开一本泛黄的技术百科全书。那个时代的工程师们,用简单的芯片和精妙的电路设计,构建…...
别再只盯着Transformer了!用PyTorch手把手复现加性注意力(Additive Attention),理解注意力机制的起点
从加性注意力到Transformer:PyTorch实战与演进逻辑解析 在Transformer架构横扫NLP领域的今天,回望2014年提出的加性注意力机制(Additive Attention),犹如在摩天大楼顶端俯瞰地基。这个由Bahdanau在神经机器翻译中首次提…...

极域电子教室防控制软件JiYuTrainer:重获学习自主权的智能解决方案
极域电子教室防控制软件JiYuTrainer:重获学习自主权的智能解决方案 【免费下载链接】JiYuTrainer 极域电子教室防控制软件, StudenMain.exe 破解 项目地址: https://gitcode.com/gh_mirrors/ji/JiYuTrainer 你是否曾在计算机课堂上被极域电子教室的全屏广播限…...

告别Unity WebGL的模糊UI:用Vue3重构前端界面,手把手教你实现双向通信
Unity WebGL与Vue3的完美联姻:打造高清交互界面的实战指南 1. 为什么需要重构Unity WebGL的UI系统? 许多Unity开发者都曾经历过这样的困境:当我们将精心制作的3D项目发布为WebGL版本时,原生UGUI在浏览器中的表现往往不尽如人意。模…...

终极CAD数据解放方案:深度解析LibreDWG开源DWG转换工具实战指南
终极CAD数据解放方案:深度解析LibreDWG开源DWG转换工具实战指南 【免费下载链接】libredwg Official mirror of libredwg. With CI hooks and nightly releases. PRs ok 项目地址: https://gitcode.com/gh_mirrors/li/libredwg 在当今数字化设计时代…...

安装部署Keystone
一、以下命令安装了Keystone组件的必要软件包。 [rootcontroller ~]# yum -y install openstack-keystone httpd mod_wsgi 二、MariaDB数据库配置 [rootcontroller ~]# mysql -uroot -p000000 查看当前已有数据库: show databases;第2步,新建“keyston…...
)
CodeWave项目导出实战:从云端到本地的完整避坑指南(含数据库配置与端口冲突解决)
CodeWave项目导出实战:从云端到本地的完整避坑指南(含数据库配置与端口冲突解决) 当开发者完成CodeWave平台上的应用构建后,如何将项目顺利迁移至本地环境往往成为新的挑战。不同于云端的一键部署,本地化过程涉及环境差…...