leetcode657. 机器人能否返回原点
- 题目描述
- 解题思路
- 执行结果
题目描述
-
机器人能否返回原点
在二维平面上,有一个机器人从原点 (0, 0) 开始。给出它的移动顺序,判断这个机器人在完成移动后是否在 (0, 0) 处结束。
移动顺序由字符串 moves 表示。字符 move[i] 表示其第 i 次移动。机器人的有效动作有 R(右),L(左),U(上)和 D(下)。
如果机器人在完成所有动作后返回原点,则返回 true。否则,返回 false。
注意:机器人“面朝”的方向无关紧要。 “R” 将始终使机器人向右移动一次,“L” 将始终向左移动等。此外,假设每次移动机器人的移动幅度相同。
示例 1:
输入: moves = "UD" 输出: true 解释:机器人向上移动一次,然后向下移动一次。所有动作都具有相同的幅度,因此它最终回到它开始的原点。因此,我们返回 true。 示例 2:
输入: moves = "LL" 输出: false 解释:机器人向左移动两次。它最终位于原点的左侧,距原点有两次 “移动” 的距离。我们返回 false,因为它在移动结束时没有返回原点。
提示:
1 <= moves.length <= 2 * 104 moves 只包含字符 'U', 'D', 'L' 和 'R'
解题思路
法1
模拟\
模拟行动过程,使用变量x,y来记录当前的位置,
左右移动x进行加减,
上下移动y进行加减
最后检查x,y是否同时为0
-
时间复杂度(O(n)) -
空间复杂度(O(1))
执行结果
法1
func judgeCircle(moves string) bool {
x, y := 0, 0 //记录起始状态
for _, v := range moves {
if v == 'U' {
y++
} else if v == 'D' {
y--
} else if v == 'R' {
x++
} else if v == 'L' {
x--
}
}
if x == 0 && y == 0 {
return true
}
return false
}
执行结果: 通过 显示详情 查看示例代码 添加备注
执行用时: 4 ms , 在所有 Go 提交中击败了 87.96% 的用户 内存消耗: 3 MB , 在所有 Go 提交中击败了 71.30% 的用户 通过测试用例: 76 / 76 炫耀一下:
进阶:如果可以移动多步的情况怎么办?
如果可以运动多步,那么步数无限制,就是l与r同时出现,D与U同时都有的时候才为真,单独出现为假
func judgeCircle(moves string) bool {
x, y := 0, 0 //记录起始状态
for _, v := range moves {
if (v == 'U' || v == 'D') && y < 2 {
if v == 'U' && y == 0 {
y = 1
} else if v == 'U' && y == -1 {
y = 2
} else if v == 'D' && y == 0 {
y = -1
} else if v == 'D' && y == 1 {
y = 2
}
} else if (v == 'L' || v == 'R') && x < 2 {
if v == 'R' && x == 0 {
x = 1
} else if v == 'R' && x == -1 {
x = 2
} else if v == 'L' && x == 0 {
x = -1
} else if v == 'L' && x == 1 {
x = 2
}
}
}
if x == 1 || x == -1 || y == 1 || y == -1 {
return false
}
return true
}
本文由 mdnice 多平台发布
相关文章:

leetcode657. 机器人能否返回原点
题目描述解题思路执行结果 leetcode657. 机器人能否返回原点 题目描述 机器人能否返回原点 在二维平面上,有一个机器人从原点 (0, 0) 开始。给出它的移动顺序,判断这个机器人在完成移动后是否在 (0, 0) 处结束。 移动顺序由字符串 moves 表示。字符 mov…...

DAY 48 Nginx的 location与rewrite模块
[正则表达式] 常用的[Nginx] 正则表达式 $ :匹配输入字符串的结束位置* :匹配前面的字符零次或多次。如“ol*”能匹配“o”及“ol”、“oll” :匹配前面的字符一次或多次。如“ol”能匹配“ol”及“oll”、“olll”,但不能匹配“…...
Linux 常用操作技巧
Linux 操作技巧大全 Linux是一种强大的操作系统,掌握各种操作技巧可以帮助我们惬意地使用它。在这篇博客中,我们将分享一些实用的Linux技巧,希望能对您有所帮助! 1. 使用Tab进行自动补全 在输入命令时,按下Tab键可…...
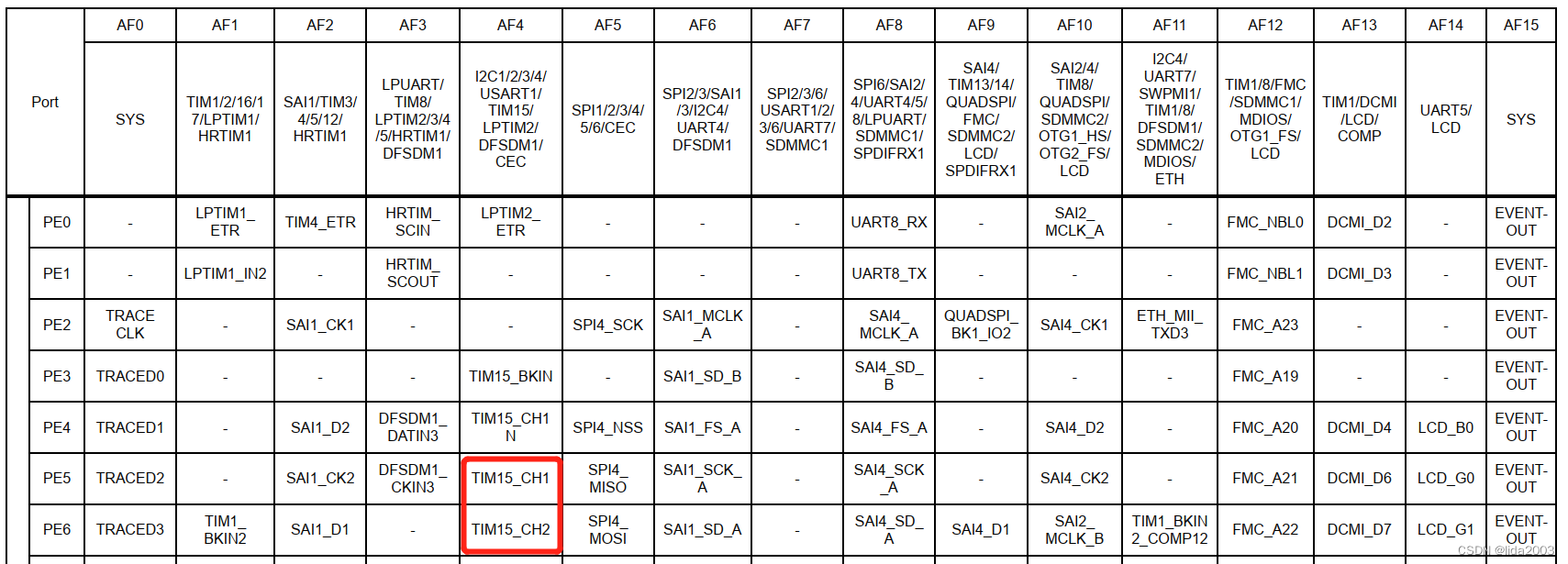
BetaFlight统一硬件配置文件研读之timer命令
BetaFlight统一硬件配置文件研读之timer命令 1. 源由2. 代码分析3. 实例分析4. 配置情况4.1 AFn配置查表4.2 timer4.3 timer show4.4 timer pin list 5. 参考资料 统一硬件配置文件的设计是一种非常好的设计模式,可以将硬件和软件的工作进行解耦。 1. 源由 cli命令…...
码出高效:Java开发手册笔记(java对象四种引用关系及ThreadLocal)
码出高效:Java开发手册笔记(java对象四种引用关系及ThreadLocal) 前言一、引用类型二、ThreadLocal价值三、ThreadLocal副作用 前言 “水能载舟,亦能覆舟。”用这句话来形容 ThreadLocal 最贴切不过。ThreadLocal 初衷是在线程并…...

为什么要进行数据决策?数据决策对企业而言有何重要意义?
“大数据”几乎已成为时下最时髦的词汇,不夸张地说,当今各行各业无不对大数据充满了向往,希望自己在新一轮的大数据营销中抢占先机。同时,从大数据中引申出的数据挖掘、数据分析、数据安全等数据运用技术也成为人们热捧的焦点。 …...

2. Java 异常体系
2.1 Throwable java.lang.Throwable 类是 Java 程序执行过程中发生的异常事件对应的类的根父类。 Throwable 中的常用方法: public void printStackTrace():打印异常的详细信息。 包含了异常的类型、异常的原因、异常出现的位置、在开发和调试阶段都得…...

如何学好STM32,需要哪些步骤?
学习STM32应用于项目开发需要以下步骤: 学习STM32的基本知识:包括STM32的架构、寄存器、外设等,理解STM32的工作原理和基本操作方法。 学习嵌入式系统和RTOS的基础知识:了解嵌入式系统的概念、RTOS的基本原理和使用方法ÿ…...
)
武忠祥老师每日一题||不定积分基础训练(四)
∫ d x 1 x 3 \int \frac{\rm dx}{1x^3} ∫1x3dx 解法一: 待定系数法: ∫ d x 1 x 3 \int \frac{dx}{1x^3} ∫1x3dx ∫ d x ( 1 x ) ( x 2 − x 1 ) \int \frac{dx}{(1x)(x^2-x1)} ∫(1x)(x2−x1)dx 1 3 ∫ ( 1 x 1 − x 2 x 2 − x …...

记一次产线打印json导致的redis连接超时
服务在中午十一点上线后,服务每分钟发出三到四次redis连接超时告警。错误信息为: Dial err:dial tcp: lookup xxxxx: i/o timeout 排查过程 先是检查redis机器的情况,redis写入并发数较大,缓存中保留了一小时大概400w条数据。red…...

FPGA入门系列12--RAM的使用
文章简介 本系列文章主要针对FPGA初学者编写,包括FPGA的模块书写、基础语法、状态机、RAM、UART、SPI、VGA、以及功能验证等。将每一个知识点作为一个章节进行讲解,旨在更快速的提升初学者在FPGA开发方面的能力,每一个章节中都有针对性的代码…...

【三十天精通Vue 3】第二十六天 Vue3 与 TypeScript 最佳实践
✅创作者:陈书予 🎉个人主页:陈书予的个人主页 🍁陈书予的个人社区,欢迎你的加入: 陈书予的社区 🌟专栏地址: 三十天精通 Vue 3 文章目录 引言一、为什么使用TypeScript?二、Vue 3和TypeScript…...

ffmpeg-mov-metadate不识别Bug修复
文章目录 BUG起因类似问题反馈问题解决具体步骤: 阅读过文章ffmpeg命令行解析调试流程记录movenc.c源码分析 BUG起因 在ffmpeg参数默认可识别的metadata参数如下: 具体可见libavformat/movenc.c->mov_write_udta_tag() mov_write_string_metadata(s,…...
(8.6) 引导程序更新)
(8)(8.6) 引导程序更新
文章目录 前言 1 我在哪里可以下载最新的引导程序? 2 使用任务规划器进行升级...
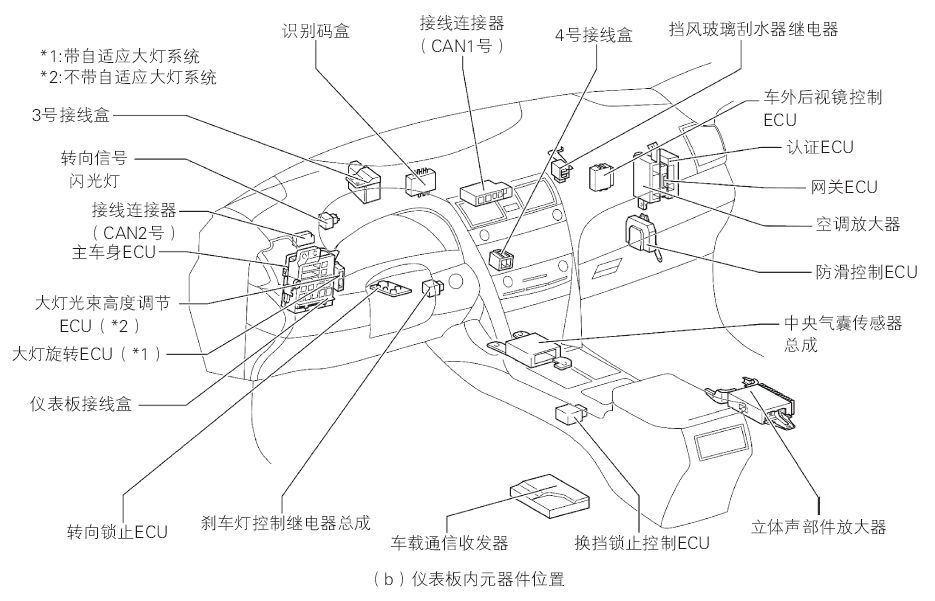
汽车电路图、原理框图、线束图、元器件布置图的识读技巧与要点
摘要: 想要读懂汽车电路图就必须把电的通路理清楚,即某条线是什么信号,该信号是输入信号、输出信号还是控制信号以及信号起什么作用,在什么条件下有信号,从哪里来,到哪里去。 一、汽车电路图的识读技巧 1.…...

( 数组和矩阵) 667. 优美的排列 II ——【Leetcode每日一题】
❓667. 优美的排列 II 难度:中等 给你两个整数 n 和 k ,请你构造一个答案列表 answer ,该列表应当包含从 1 到 n 的 n 个不同正整数,并同时满足下述条件: 假设该列表是 answer [a1, a2, a3, ... , an] ࿰…...

【python基础语法七】python内置函数和内置模块
内置全局函数 abs 绝对值函数 print(abs(-1)) # 1 print(abs(100)) # 100round 四舍五入 """奇进偶不进(n.5的情况特定发生)""" res round(3.87) # 4 res round(4.51) # 5 # res round(2.5) # 2 # res round(3.5) # 4 res round(6.5) # …...

81. read readline readlines 读取文件的三种方法
81. read readline readlines 读取文件的三种方法 文章目录 81. read readline readlines 读取文件的三种方法1. 读取文件的三种方法2. read方法3. readline方法4. readlines方法5. 代码总结5.1 read方法读取全部内容5.2 readline方法读取一行,返回字符串5.3 readli…...

【社区图书馆】【图书活动第四期】
目录 一、前言 二、作者简介 三、《PyTorch高级机器学习实战》内容简介 四、书目录 一、前言 今天,偶尔逛到csdn社区图书馆,看到有活动 “【图书活动第四期】来一起写书评领实体奖牌红包电子勋章吧!”(活动到今天结束…...
)
webpack学习指南(上)
构建流程 Webpack 的构建流程可以分为以下几个步骤: 解析配置文件:Webpack 会读取项目中的 webpack.config.js 文件,并解析其中的配置项。 解析入口文件:Webpack 通过配置文件中设置的 entry 入口,递归地解析出所有依…...

Kubernetes多租户架构设计与实践
Kubernetes多租户架构设计与实践 一、引言 多租户是指在同一个Kubernetes集群中为多个用户或团队提供隔离的资源和环境。本文将深入探讨Kubernetes多租户架构的核心概念、实现方法和最佳实践。 二、多租户架构设计 2.1 多租户参考架构 ┌────────────────…...

MATLAB 2018a/2023b实测:Libsvm安装后如何用自带数据集快速验证与跑通第一个模型
MATLAB 2018a/2023b实战:Libsvm安装后快速验证与模型跑通全流程 当你第一次在MATLAB中成功安装Libsvm后,那种兴奋感可能很快会被"接下来该做什么"的迷茫所取代。别担心,这篇文章将带你用Libsvm自带的heart_scale数据集,…...

别再傻傻分不清了!MIPI DPHY和CPHY到底怎么选?从带宽、成本和PCB布线给你讲透
MIPI DPHY与CPHY工程选型实战指南:从理论到PCB布局的完整决策框架 在移动设备硬件设计中,MIPI接口的选择往往成为影响项目成败的关键决策点。当面对新一代图像传感器规格书上的DPHY/CPHY双模支持标识时,资深工程师的眉头总会不自觉地皱起——…...

别再死记公式了!用“信号与系统”的视角,5分钟看懂卡尔曼滤波与互补滤波的本质区别
从频域视角解析卡尔曼滤波与互补滤波的本质差异 在机器人控制和姿态估计领域,数据融合算法始终是工程师们关注的焦点。当我们面对陀螺仪和加速度计这两种各具特色的传感器数据时,如何有效融合它们的长处,同时规避各自的短板,成为构…...

从老式收音机到现代Wi-Fi:聊聊AM调幅技术为何还没被淘汰?
从老式收音机到现代Wi-Fi:AM调幅技术的百年生存法则 清晨六点,美国中西部农场主约翰习惯性拧开那台1947年产的Zenith Trans-Oceanic收音机,沙沙声中传来农业气象预报;与此同时,东京秋叶原的工程师山田正用软件无线电接…...

告别卡顿与臃肿:两种高效获取MATLAB Online账号的实战指南
1. 为什么你需要MATLAB Online? 如果你正在读这篇文章,大概率是因为你的电脑跑不动桌面版MATLAB了。我完全理解这种痛苦——当年我的老笔记本打开MATLAB要三分钟,运行个简单脚本风扇就狂转,更别提安装时那令人绝望的20GB硬盘占用…...

如何快速上手Unitree Go2 ROS2 SDK:模块化机器人开发完整指南
如何快速上手Unitree Go2 ROS2 SDK:模块化机器人开发完整指南 【免费下载链接】go2_ros2_sdk Unofficial ROS2 SDK support for Unitree GO2 AIR/PRO/EDU 项目地址: https://gitcode.com/gh_mirrors/go/go2_ros2_sdk Unitree Go2 ROS2 SDK是为宇树科技GO2系列…...

Zotero Duplicates Merger:5分钟搞定文献库重复问题
Zotero Duplicates Merger:5分钟搞定文献库重复问题 【免费下载链接】ZoteroDuplicatesMerger A zotero plugin to automatically merge duplicate items 项目地址: https://gitcode.com/gh_mirrors/zo/ZoteroDuplicatesMerger 还在为Zotero文献库中堆积如山…...

HEIF Utility:Windows平台HEIF格式兼容性完整解决方案实战
HEIF Utility:Windows平台HEIF格式兼容性完整解决方案实战 【免费下载链接】HEIF-Utility HEIF Utility - View/Convert Apple HEIF images on Windows. 项目地址: https://gitcode.com/gh_mirrors/he/HEIF-Utility 对于使用iPhone或iPad的Windows用户而言&a…...

5分钟解锁浏览器Markdown阅读新体验:告别文档查看烦恼
5分钟解锁浏览器Markdown阅读新体验:告别文档查看烦恼 【免费下载链接】markdown-viewer Markdown Viewer / Browser Extension 项目地址: https://gitcode.com/gh_mirrors/ma/markdown-viewer 你是否经常需要查看技术文档、API说明或学习笔记,却…...