open3d io操作
目录
1. read_image, write_image
2. read_point_cloud, write_point_cloud
3. 深度相机IO操作
4. Mesh文件读取
1. read_image, write_image
读取jpg. png. bmp等文件
image_io.py
import open3d as o3dif __name__ == "__main__":img_data = o3d.data.JuneauImage()print(f"Reading image from file: Juneau.jpg stored at {img_data.path}")# 1. readimg = o3d.io.read_image(img_data.path) # JuneauImage.jpgprint(img) # open3d.geometry.Image. Image of size 800x489, with 3 channels.print("Saving image to file: copy_of_Juneau.jpg")# 2. writeo3d.io.write_image("copy_of_Juneau.jpg", img) # open3d.geometry.Image
2. read_point_cloud, write_point_cloud
读写点云pcd, ply等文件
point_cloud_io.py
import open3d as o3dif __name__ == "__main__":pcd_data = o3d.data.PCDPointCloud()print(f"Reading pointcloud from file: fragment.pcd stored at {pcd_data.path}")# 1. read PointCloud.pcdpcd = o3d.io.read_point_cloud(pcd_data.path) print(pcd)print("Saving pointcloud to file: copy_of_fragment.pcd")# 2. write PointCloudo3d.io.write_point_cloud("copy_of_fragment.pcd", pcd)3. 深度相机IO操作
读取深度相机
realsense_io.py
"""Demonstrate RealSense camera discovery and frame capture"""import open3d as o3dif __name__ == "__main__":o3d.t.io.RealSenseSensor.list_devices()rscam = o3d.t.io.RealSenseSensor() # 深度相机,比如D435irscam.start_capture()print(rscam.get_metadata())for fid in range(5):rgbd_frame = rscam.capture_frame()o3d.io.write_image(f"color{fid:05d}.jpg", rgbd_frame.color.to_legacy()) # 彩色图像. tensor转o3d.io.write_image(f"depth{fid:05d}.png", rgbd_frame.depth.to_legacy()) # 深度图像print("Frame: {}, time: {}s".format(fid, rscam.get_timestamp() * 1e-6))rscam.stop_capture()4. Mesh文件读取
读取mesh网格数据,ply等文件
triangle_mesh_io.py
import open3d as o3dif __name__ == "__main__":knot_data = o3d.data.KnotMesh()print(f"Reading mesh from file: knot.ply stored at {knot_data.path}")mesh = o3d.io.read_triangle_mesh(knot_data.path) # TriangleMeshprint(mesh)print("Saving mesh to file: copy_of_knot.ply")o3d.io.write_triangle_mesh("copy_of_knot.ply", mesh)相关文章:
open3d io操作
目录 1. read_image, write_image 2. read_point_cloud, write_point_cloud 3. 深度相机IO操作 4. Mesh文件读取 1. read_image, write_image 读取jpg. png. bmp等文件 image_io.py import open3d as o3dif __name__ "__main__":img_data o3d.data.JuneauIma…...
【Linux】Linux安装Redis(图文解说详细版)
文章目录 前言第一步,下载安装包第二步,上传安装包到/opt下(老规矩了,安装包在opt下)第三步,解压安装包第四步,编译第五步,安装第六步,配置redis第七步,设置开…...

setTimeout不准时,CSS精准实现计时器功能
实际开发过程中,我们会经常遇到,首次进入页面进行相应提示,然后指定时间后自动消失或者前端时钟展示等需求。 按照传统方案,我们可以使用 setTimeout 实现。但其存在:实际延时比设定值更久的情况。 setTimeout 不准时…...

单细胞跨模态分析综述
单细胞技术的最新进展使跨模态和组织位置的细胞高通量分子分析成为可能。单细胞转录组数据现在可以通过染色质可及性、表面蛋白表达、适应性免疫受体库分析和空间信息进行补充。跨模态单细胞数据的可用性越来越高,推动出新的计算方法,以帮助科学家获得生…...
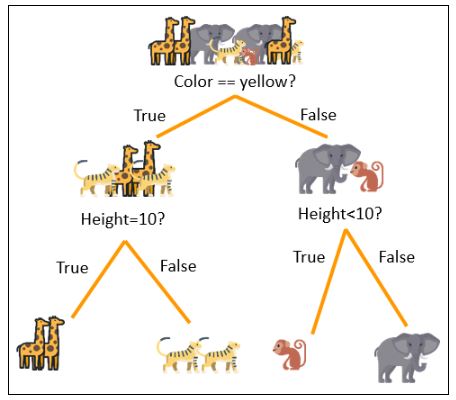
【零基础学机器学习 1】什么是机器学习?
机器学习的社会应用 1. 金融风控 机器学习在金融风控方面的应用非常广泛,可以用于预测借款人的信用风险、欺诈行为等。通过收集大量的历史数据,构建机器学习模型,可以对借款人的信用风险进行预测,从而帮助金融机构降低风险。 2…...
软开基础(一))
ARM处理器与中断——嵌入式(驱动)软开基础(一)
1 CPU的内部结构? CPU的内部结构大致可以分为: (1)控制单元(指令寄存器、指令译码器、操作控制器)。 (2)运算单元(算术逻辑单元)。 (3)存储单元(专用寄存器和通用寄存器) (4)时钟。 2 CPU跟内存、虚拟内存、硬盘的关系? (1)CPU要调用的程序和数据来自…...

WX小程序 - 2
条件渲染: wx:if "{{ newlist.length 0 }}" wx:else 跳路由:绑定点击事件,执行跳转页面 bindtap data-id"{{ item.id }}" 添加id wx.navigateTo 跳路由并传参, 下一个路由 onLoad生命周期可以获得参数…...

开源之夏2023 | 欢迎申请openEuler Embedded SIG开发任务
关于开源之夏 开源之夏是开源软件供应链点亮计划下的暑期活动,由中科院软件研究所与openEuler社区联合主办,旨在鼓励在校学生积极参与开源软件的开发维护,促进优秀开源软件社区的蓬勃发展。 活动联合各大开源社区,针对重要开源软件…...
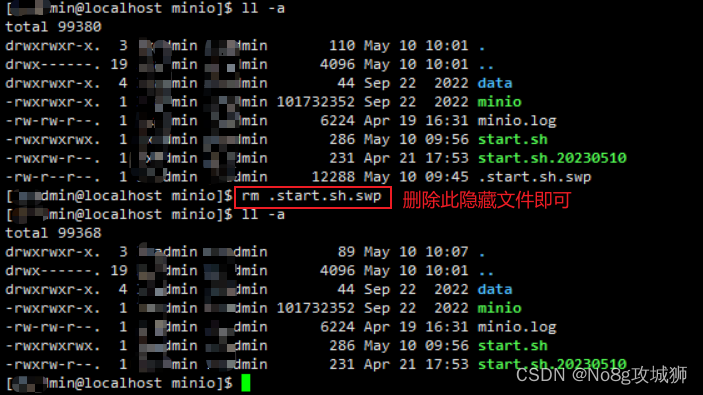
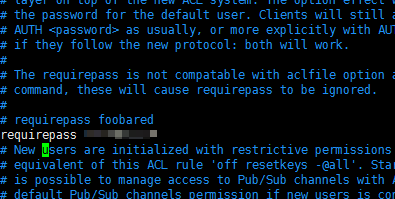
【异常解决】vim编辑文件时提示 Found a swap file by the name “.start.sh.swp“的解决方案
vim编辑文件时提示 Found a swap file by the name ".start.sh.swp"的解决方案 一、问题描述二、原因说明三、解决方案3.1 方案1 删除即可3.2 方案2 禁止生成swp文件 一、问题描述 vim编辑文件时提示 Found a swap file by the name “.start.sh.swp”,如…...

「企业应用架构」应用架构概述
在信息系统中,应用架构或应用架构是构成企业架构(EA)支柱的几个架构域之一 应用架构描述了业务中使用的应用程序的行为,重点是它们如何相互之间以及如何与用户交互。它关注的是应用程序消费和生成的数据,而不是它们的内…...
ePWM模块(3)
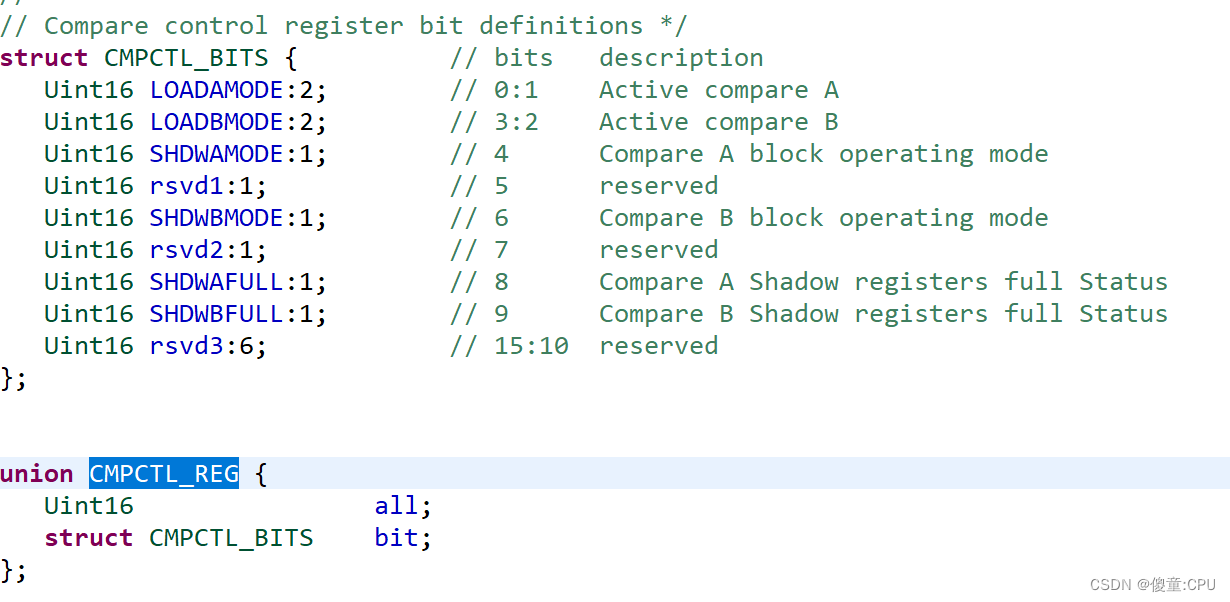
比较模块 CMPA:比较寄存器A,其值与TBCTR值比较,相同时,事件发送到动作模块。 CMPB:比较寄存器B,其值与TBCTR值比较,相同时,事件发送到动作模块。 CMPCTL:控制寄存器(重要) SHDWAFULL(或SHDWBFULL):CMPA(或B)阴影寄存器满标志位 0:未满 1:满了 SHDWAMODE(或…...

【笔试强训选择题】Day11.习题(错题)解析
作者简介:大家好,我是未央; 博客首页:未央.303 系列专栏:笔试强训选择题 每日一句:人的一生,可以有所作为的时机只有一次,那就是现在!!! 文章目录…...

JVM知识
垃圾收集器就是内存回收的具体实现 Serial Serial收集器是最基本的,发展历史最悠久的收集器。在JDK1.3之前是虚拟机新生代收集的唯一选择。是一种单线程收集器,只会使用一个CPU或者一条收集线程去完成垃圾收集工作,在进行垃圾收集的时候需要…...
操作系统第二章——进程与线程(中)
和光同尘,与时舒卷 文章目录 2.2.1 调度的概念,层次知识总览调度的基本概念高级调度低级调度中级调度三层调度的联系,对比进程的挂起态和七状态模型知识回顾 2.2.2 进程调度的时机,切换与过程,方式知识总览进程调度的时…...

AlphaFold的极限:高中生揭示人工智能在生物信息学挑战中的缺陷
人工智能程序AlphaFold (AlphaFold2开源了,不是土豪也不会编程的你怎么蹭一波?),通过预测蛋白质结构解决了结构生物信息学的核心问题。部分AlphaFold迷们声称“该程序已经掌握了终极蛋白质物理学,其工作能力已超越了最初的设计”。…...

RocketMQ双主双从环境搭建
环境要求 64位操作系统,推荐 Linux/Unix/macOS 64位 JDK 1.8 服务器准备 准备4台服务器两台master两台slave,如果服务器紧凑,则至少需要两台服务器相互master-slave IP HOSTS 172.*******.120 rocketmq-nameserver1 rocketmq-master1 …...

next.js博客搭建_初始化next项目(第一步)
文章目录 ⭐前言⭐next初始化TypeScript 开发项目安装react的ui框架(tDesign)设计布局 ⭐结束 ⭐前言 大家好,我是yma16,本期给大家分享next项目搭建博客的开始。 背景 因为我的博客网站https://yongma16.xyz是基于vue2搭建的&am…...
ACM - 其他算法 - 基础(前缀和 + 差分)
ACM- 其他算法 一、前缀和模板例题1、区间余数求K倍区间个数:AcWing 1230. K倍区间例题2、前缀和哈希求最长个数平分子串:Leetcode 面试题 17.05 字母与数字 二、差分1、一维差分2、二维差分 一、前缀和 模板 //一维前缀和 S[i] a[1] a[2] ... a[i] a[l] ... …...
备考大全》【冲刺10】《软考高项常见工具口语化解释》)
No.056<软考>《(高项)备考大全》【冲刺10】《软考高项常见工具口语化解释》
《软考高项常见工具口语化解释》 序号工具名称口语化属于哪个过程1模板、表格和标准就是用之前的项目的模版、表格、标准,结合本项目进行了修改,在编制一些计划、方案的时候就可以采用这个工具和技术。可以拿来就用的,节约时间、提高质量的。…...
:表分区和分库分表)
MySQL原理(九):表分区和分库分表
前言 上一篇介绍了 MySQL 的存储过程和触发器,这一篇将介绍表分区和分库分表相关的内容。 表分区 原本的表文件都是以完整的形式存储在磁盘中,而表分区则是指将一张表的数据拆分成多个磁盘文件,然后放到磁盘中存储。 做了表分区之后&…...

【DeepSeek-R1代码相似度引擎解密】:3层语义比对机制、Token归一化偏差修正与Jaccard阈值黄金分割点
更多请点击: https://kaifayun.com 第一章:DeepSeek代码重复检测 DeepSeek-R1 模型在训练过程中引入了严格的代码去重机制,其核心目标是消除训练语料中语义等价或高度相似的代码片段,从而提升模型对真实编程模式的学习能力与泛化…...

硬件答辩问题总结
一、电源纹波是什么,为什么LDO的小,DCDC的大1.电源纹波电源纹波 是指直流电源输出电压上叠加的 交流波动成分,表现为电压在理想直流值附近上下波动。2.LDO 纹波小原理LDO 内部是一个 调整管(可变电阻) 串联在输入和输出…...

独立站内容分层:一层给 SEO,一层给 GEO
你的内容在喂两个完全不同的"阅读者" 你的博客文章,从来都不只有一个读者。 传统认知里,独立站内容的读者只有两类:真人访客和搜索引擎爬虫。SEO 优化的一切工作,本质上都是在讨好后者,顺带服务前者。 但…...
)
Unity事件系统实战:用事件驱动重构你的金币拾取逻辑(告别硬编码)
Unity事件系统实战:用事件驱动重构你的金币拾取逻辑(告别硬编码)在游戏开发中,我们经常会遇到这样的场景:玩家拾取金币后,需要更新UI、播放音效、解锁成就、保存数据……如果把这些逻辑全部写在金币拾取的代…...

淘宝淘金币自动化脚本终极指南:如何每天节省25分钟实现智能任务管理
淘宝淘金币自动化脚本终极指南:如何每天节省25分钟实现智能任务管理 【免费下载链接】taojinbi 淘宝淘金币自动执行脚本,包含蚂蚁森林收取能量,芭芭农场全任务,解放你的双手 项目地址: https://gitcode.com/gh_mirrors/ta/taoji…...

php有什么版本,php语言有几个版本
php有什么版本,php语言有几个版本PHP的大版本主要分四支:PHP4/PHP5/PHP6/PHP7 其中,PHP4由于太古老、对OO支持不力已基本被淘汰,请无视PHP4。 PHP6由于基本没有生产线上的应用,还基本只是一款概念产品,很多功能已在PHP…...

告别枯燥理论!用Unity脚本生命周期与预制体玩转一个“会变身的敌人”
用Unity打造会变身的敌人:脚本生命周期与预制体的实战应用在游戏开发中,敌人AI的行为设计往往是新手开发者最感兴趣也最容易感到困惑的部分。Unity的脚本生命周期和预制体系统为这类需求提供了强大支持,但教科书式的讲解常常让学习者陷入枯燥…...

03 - 变量与数据类型
03 - 变量与数据类型 变量是编程里最基础的概念,相当于你往电脑里存东西的"容器"。这章我们把变量的命名规则、Python 的几种基本数据类型都过一遍。 变量是什么 说白了,变量就是一个有名字的盒子。你往里面放个东西,以后想用这个…...
)
DeepSeek代码风格检查避坑指南(内部审计报告首次披露:37个被忽略的合规红线)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek代码风格检查的合规性本质与审计背景 DeepSeek代码风格检查并非单纯的技术偏好约束,而是嵌入研发治理链条中的合规性控制节点。其本质是将编程实践与组织级安全策略、行业监管要求&…...

Log4Shell漏洞深度解析:Spring Boot日志注入原理与四层修复方案
1. 这个漏洞不是“远程执行代码”那么简单——它是一次对Java生态信任链的系统性击穿Log4j CVE-2021-44228,业内常简称为“Log4Shell”,2021年12月爆发时,我正在给一家金融客户的Spring Boot微服务集群做灰度发布前的安全加固。凌晨三点收到告…...