MSP432自主开发笔记4:DS3115舵机的0~180全角度驱动
芯片使用:MSP432P401R.
今日学习一款全角度15KG大扭力舵机的驱动,最近电赛学习任务紧,更新一篇比较水的文章:
文章提供原理解释,全部代码,整体工程:
目录
舵机驱动原理:
这是舵机DS3115MG:
全角度反馈编程设计:
初始化定时器TA3:
设计转角函数:
整体测试工程下载:
测试成功视频:
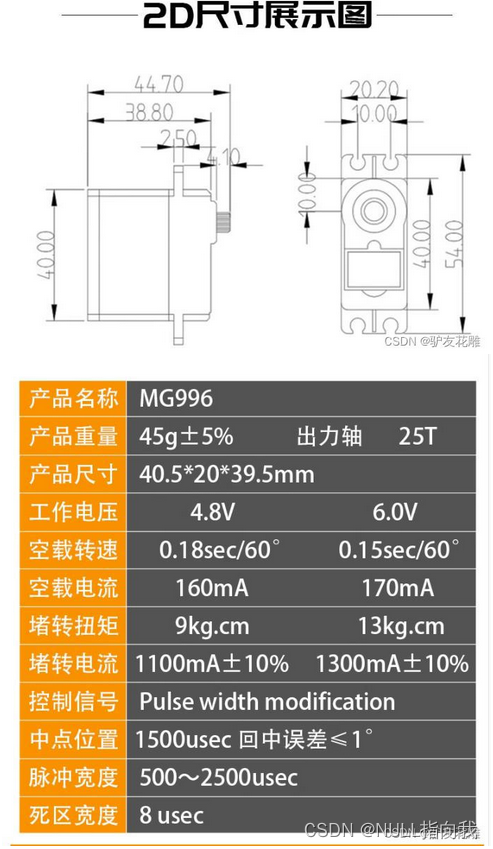
提示:这个代码对MG996R舵机同样适用
舵机驱动原理:
目前我所接触到的舵机,9g舵机,以及本文将要介绍的DS3115MG,它们作为舵机,一般接有三根线,其中俩根是供电使用,还有一根是信号线,供电需要我们对照产品手册选择合适的电源,而信号线则是重点学习的地方:
之前我有一篇文章讲过9g舵机的驱动:
MSP432学习笔记8:定时器A_PWM驱动舵机_NULL指向我的博客-CSDN博客
而我们今日学习的主角:DS3115MG,它的驱动原理与之大同小异,我们需要给信号线一个相应频率PWM的信号,让其知道有控制信号要到来,然后同时调整PWM的占空比即可调整其旋转角度
(这里信号的频率与占空比先不仔细说,后文会一起查阅介绍,手把手编程驱动)
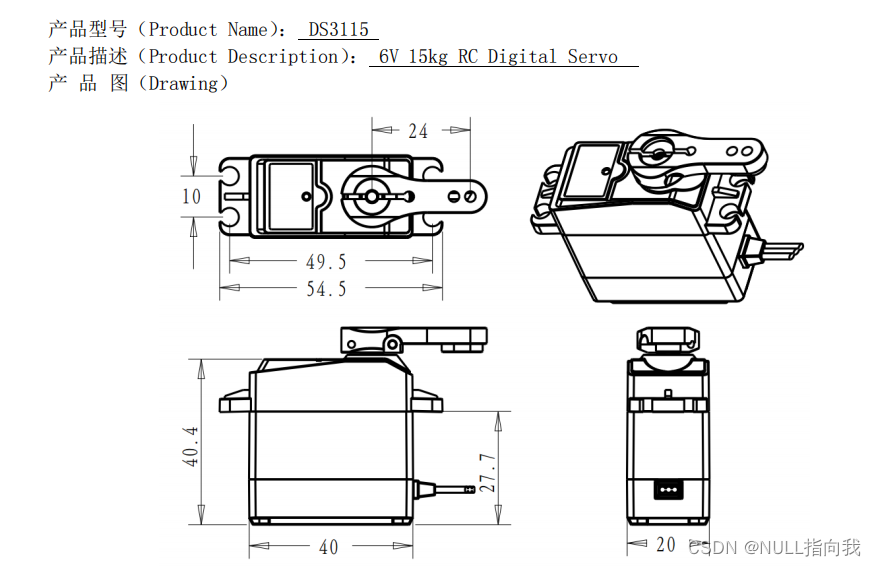
这是舵机DS3115MG:

我们看到它的手册,挖掘有用信息:
我们需要知道的大致有三个重要点:1、电压电流 2、PWM频率 3、识别占空比范围
第一张图告诉我们,这个产品是有15KG的扭力的,而且预计可能要最大6V的供电:
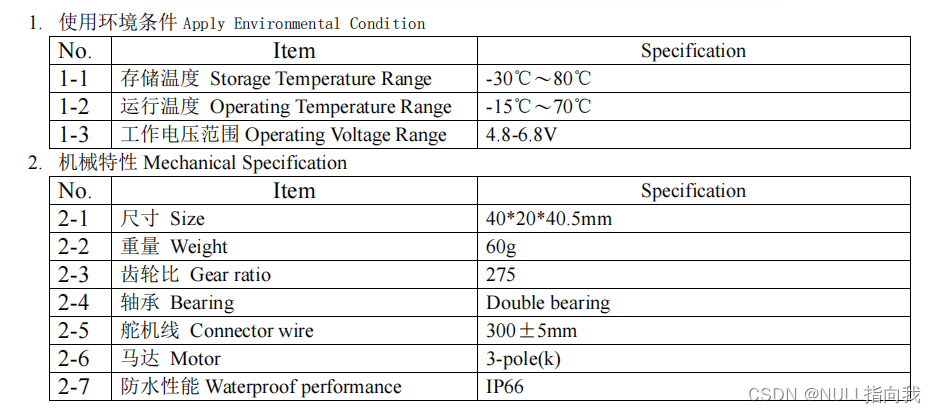
第二张图介绍基本机械特性与性能,使用机械电子产品应在合理的环境条件下
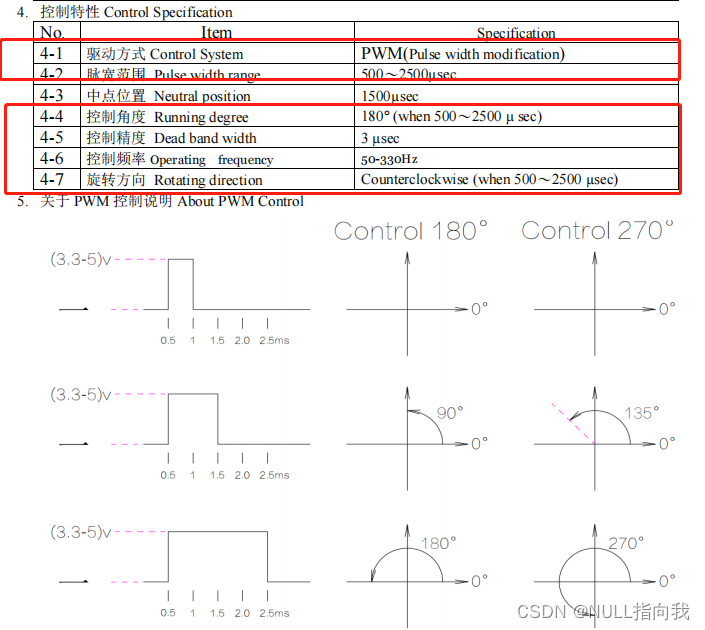
这张图便是有我们需要的参数:
1.PWM频率范围50~330Hz
2.脉宽范围是500~2500 us
3.精度是3us
4.旋转方向是顺时针
全角度反馈编程设计:
实验目标:
0.初始化定时器A的PWM模式
1.舵机缓慢从0~180全角度转动
2.反馈当前高电平占空比
首先我们有输出PWM的需求,因此这时少不了MSP432的定时器A,他作为瑞士军刀级别的多功能定时器模块,它有PWM输出的功能
初始化定时器TA3:
//定时器A3 PWM 初始化
void TimerA3_PWM_inint(void)
{//1.配置GPIO复用GPIO_setAsPeripheralModuleFunctionOutputPin(GPIO_PORT_P9,GPIO_PIN2,GPIO_PRIMARY_MODULE_FUNCTION);//2.配置结构体Timer_A_PWMConfig TimA3_PWMConfig; //定义一个名为 TimA1_PWMConfig的结构体TimA3_PWMConfig.clockSource=TIMER_A_CLOCKSOURCE_SMCLK; //时钟源TimA3_PWMConfig.clockSourceDivider=48; //时钟分频 范围1~64TimA3_PWMConfig.timerPeriod=3333; //自动重载值TimA3_PWMConfig.compareRegister=TIMER_A_CAPTURECOMPARE_REGISTER_3;//通道一(与引脚相关联)TimA3_PWMConfig.compareOutputMode=TIMER_A_OUTPUTMODE_TOGGLE_SET; //输出模式TimA3_PWMConfig.dutyCycle=1; //此处可初始调占空比//初始化定时器:Timer_A_generatePWM(TIMER_A3_BASE,&TimA3_PWMConfig);}
这段代码分为几个步骤来初始化定时器TA3:
1.配置GPIO复用
2.配置初始化结构体:
我此处的时钟源SMCLK是配置的48Mhz,48分频,
TimA3_PWMConfig.timerPeriod=3333; 是自动重载值,是根据需要频率计算的:
计算公式如下:
PWM频率 = 时钟源频率 / ((时钟源除数值“时钟分频”) *(CCR0值“自动重载值” + 1))
此处我需要的是300HZ的信号,因此我的计算过程如下:
300=48 000 000/(48*(CCR0+1))
计算出CCR0约为3333
设计转角函数:
因为这个项目仅仅只需让这个舵机转就行了,所以这部分做的比较粗糙,使用了延时函数以及扔进主循环的诸多粗糙做法:
大致思路是定义好其最大与最小占空比,在定义其每次转角占空比增加的最小分度 ,让i从500~2500之间每次加三在变化,同时向上位机打印当前角度的i值:
#include "main.h"#define DIV 3
#define DIV_MAX 2500
#define DIV_MIN 500uint16_t i=0;int main(void)
{inint_all(); //初始化所有模块while (1){if(i<DIV_MIN){i=DIV_MIN;}i+=DIV;printf("%d\r\n",i);delay_ms(50);MAP_Timer_A_setCompareValue(TIMER_A3_BASE,TIMER_A_CAPTURECOMPARE_REGISTER_3,i);if(i>=DIV_MAX){i=DIV_MIN;}}
}整体测试工程下载:
https://download.csdn.net/download/qq_64257614/88111224?spm=1001.2014.3001.5503
测试成功视频:
·
DS3115舵机的0~180全角度驱动
提示:这个代码对MG996R舵机同样适用

相关文章:
MSP432自主开发笔记4:DS3115舵机的0~180全角度驱动
芯片使用:MSP432P401R. 今日学习一款全角度15KG大扭力舵机的驱动,最近电赛学习任务紧,更新一篇比较水的文章: 文章提供原理解释,全部代码,整体工程: 目录 舵机驱动原理: 这是舵机DS3115MG:…...
)
【Matlab】基于卷积神经网络的时间序列预测(Excel可直接替换数据)
【Matlab】基于卷积神经网络的时间序列预测(Excel可直接替换数据) 1.模型原理2.数学公式3.文件结构4.Excel数据5.分块代码6.完整代码7.运行结果1.模型原理 基于卷积神经网络(Convolutional Neural Network,CNN)的时间序列预测是一种用于处理时间序列数据的深度学习方法。…...

Ansible安装部署与应用
文章目录 一、ansible简介二、ansible 环境安装部署三、ansible 命令行模块3.1 command 模块3.2 shell 模块3.3 cron 模块3.4 user 模块3.5 group 模块3.6 copy 模块3.7 file 模块3.8 hostname 模块3.9 ping 模块3.10 yum 模块3.11 service/systemd 模块3.12 script 模块3.13 m…...
重生之我要学C++第四天
这篇文章的主要内容是类的默认成员函数。如果对大家有用的话,希望大家三连支持,博主会继续努力! 目录 一.类的默认成员函数 二.构造函数 三.析构函数 四.拷贝构造函数 五.运算符重载 一.类的默认成员函数 如果一个类中什么成员都没有&…...
创建一个简单的 Servlet 项目
目录 1.首先创建一个 Maven 项目 2.配置 maven 仓库地址 3.添加引用 4.配置路由文件 web.xml 5.编写简单的代码 6.配置 Tomcat 7.写入名称,点击确定即可 8.访问 1.首先创建一个 Maven 项目 2.配置 maven 仓库地址 3.添加引用 https://mvnrepository.com/ 中央仓库地址…...

godot引擎c++源码深度解析系列一
许久没有使用c开发过项目了,如果按照此时单位的入职要求,必须拥有项目经验的话,那我就得回到十多年前,大学的时代,哪个时候真好,电脑没有这么普及,手机没有这么智能,网络没有这么发达…...
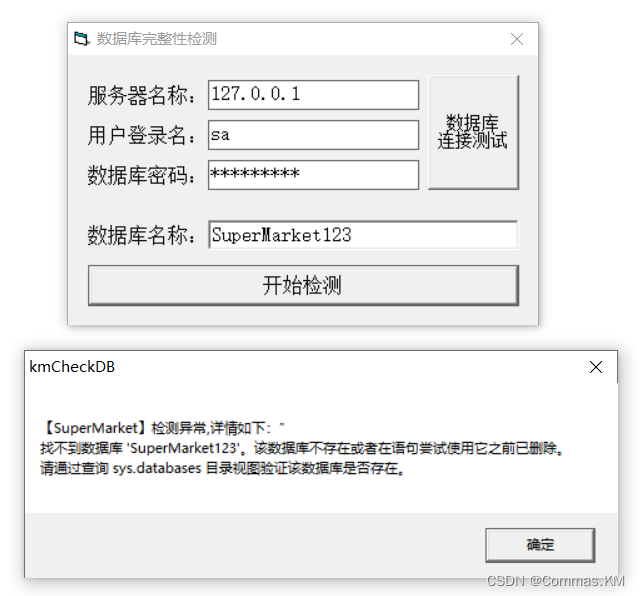
【VB6|第21期】检查SqlServer数据库置疑损坏的小工具(含源码)
日期:2023年7月25日 作者:Commas 签名:(ง •_•)ง 积跬步以致千里,积小流以成江海…… 注释:如果您觉得有所帮助,帮忙点个赞,也可以关注我,我们一起成长;如果有不对的地方…...

React的hooks---useCallback useMemo
useCallback 和 useMemo 结合 React.Memo 方法的使用是常见的性能优化方式,可以避免由于父组件状态变更导致不必要的子组件进行重新渲染 useCallback useCallback 用于创建返回一个回调函数,该回调函数只会在某个依赖项发生改变时才会更新,…...
05. 容器资源管理
目录 1、前言 2、CGroup 2.1、是否开启CGroup 2.2、Linux CGroup限制资源能使用 2.2.1、创建一个demo 2.2.2、CGroup限制CPU使用 2.3、Linux CGroup限制内存使用 2.4、Linux CGroup限制IO 3、Docker对资源的管理 3.1、Docker对CPU的限制 3.1.1、构建一个镜像 3.1.2…...
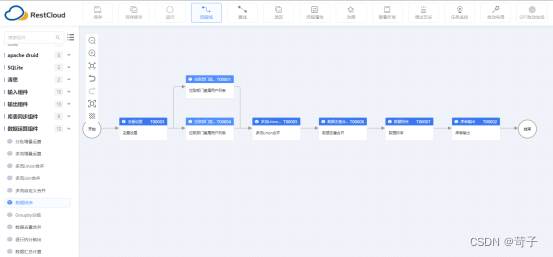
通过ETL自动化同步飞书数据到本地数仓
一、飞书数据同步到数据库需求 使用飞书的企业都有将飞书的数据自动同步到本地数据库、数仓以及其他业务系统表的需求,主要是为了实现飞书的数据与业务系统进行流程拉通或数据分析时使用,以下是一些具体的同步场景示例: 组织架构同步&#…...

MySQL基础扎实——MySQL中各种数据类型之间的区别
在MySQL中,有各种不同的数据类型可供选择来存储不同类型的数据。下面是一些常见的数据类型以及它们之间的区别: 整数类型: TINYINT:1字节,范围为-128到127或0到255(无符号)。SMALLINT࿱…...

每天五分钟机器学习:多项式非线性回归模型
本文重点 在前面的课程中,我们学习了线性回归模型和非线性回归模型的区别和联系。多项式非线性回归模型是一种用于拟合非线性数据的回归模型。与线性回归模型不同,多项式非线性回归模型可以通过增加多项式的次数来适应更复杂的数据模式。在本文中,我们将介绍多项式非线性回…...

ETH网络学习
概要 ETH网络是一个P2P网络,整个网络又区分为“执行层”与“共识层”。“执行层”节点负责交易交换,“共识层”节点负责区块打包、区块验证、区块同步和链同步。 执行层 执行层分为“服务发现”与“DevP2P”,两者共同并行执行。 服务发现…...

01-将函数参数化进行传递
项目源码:https://github.com/java8/ 1 应对不断变化的需求 在我们进行开发中,经常需要面临需求的不断变更,我们可以将行为参数化以适应不断变更的需求。 行为参数化就是可以帮助我们处理频繁变更的需求的一种软件开发模式 我们可以将代码…...
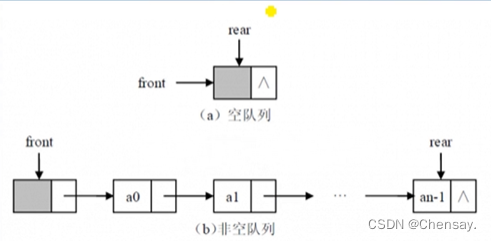
数据结构【栈和队列】
第三章 栈与队列 一、栈 1.定义:只允许一端进行插入和删除的线性表,结构与手枪的弹夹差不多,可以作为实现递归函数(调用和返回都是后进先出)调用的一种数据结构; 栈顶:允许插入删除的那端&…...
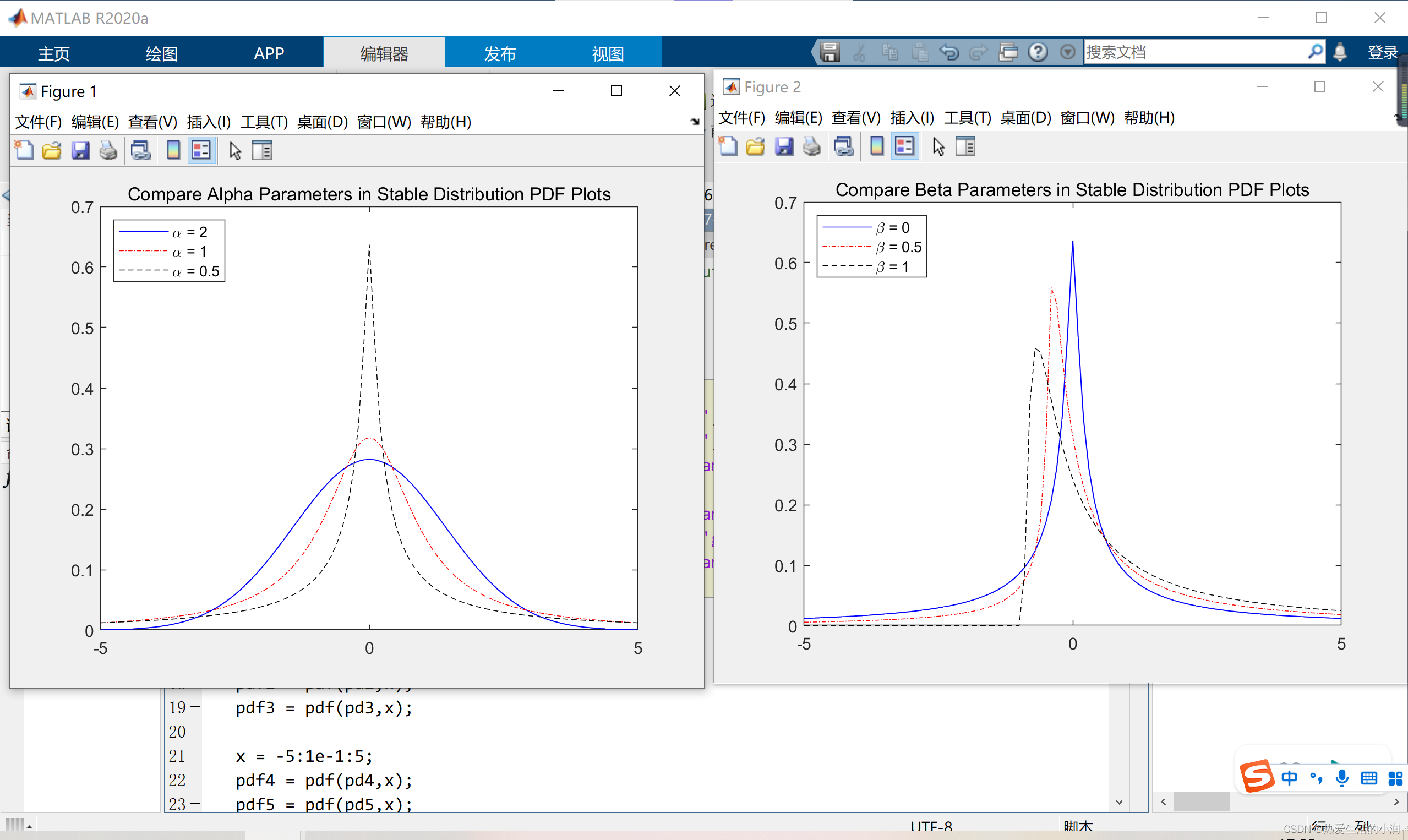
MATLAB | 产生阿尔法稳定分布噪声并作出概率密度函数
一、问题描述 想产生不同特征参数的α稳定随机变量,并且作出其概率密度函数进行对比。 二、解决思路 运行了MATLAB的官方实例代码: openExample(‘stats/ComparePDFsOfStableDistributionsExample’) (1)使用makedist()函数生成…...

深入浅出Pytorch函数——torch.softmax/torch.nn.functional.softmax
分类目录:《深入浅出Pytorch函数》总目录 相关文章: 机器学习中的数学——激活函数:Softmax函数 深入浅出Pytorch函数——torch.softmax/torch.nn.functional.softmax 深入浅出Pytorch函数——torch.nn.Softmax 将Softmax函数应用于沿dim的…...

Vue2学习笔记
vue是根据数据来构建用户界面的一套框架 创建一个vue实例 <!-- 1.创建一个容器 2.引入vue.js开发版本(全局的) 3.创建实例对象 4.配置选项 > 完成渲染 --> <div id"app">{{ msg }} </div> <script srcvue.js><…...
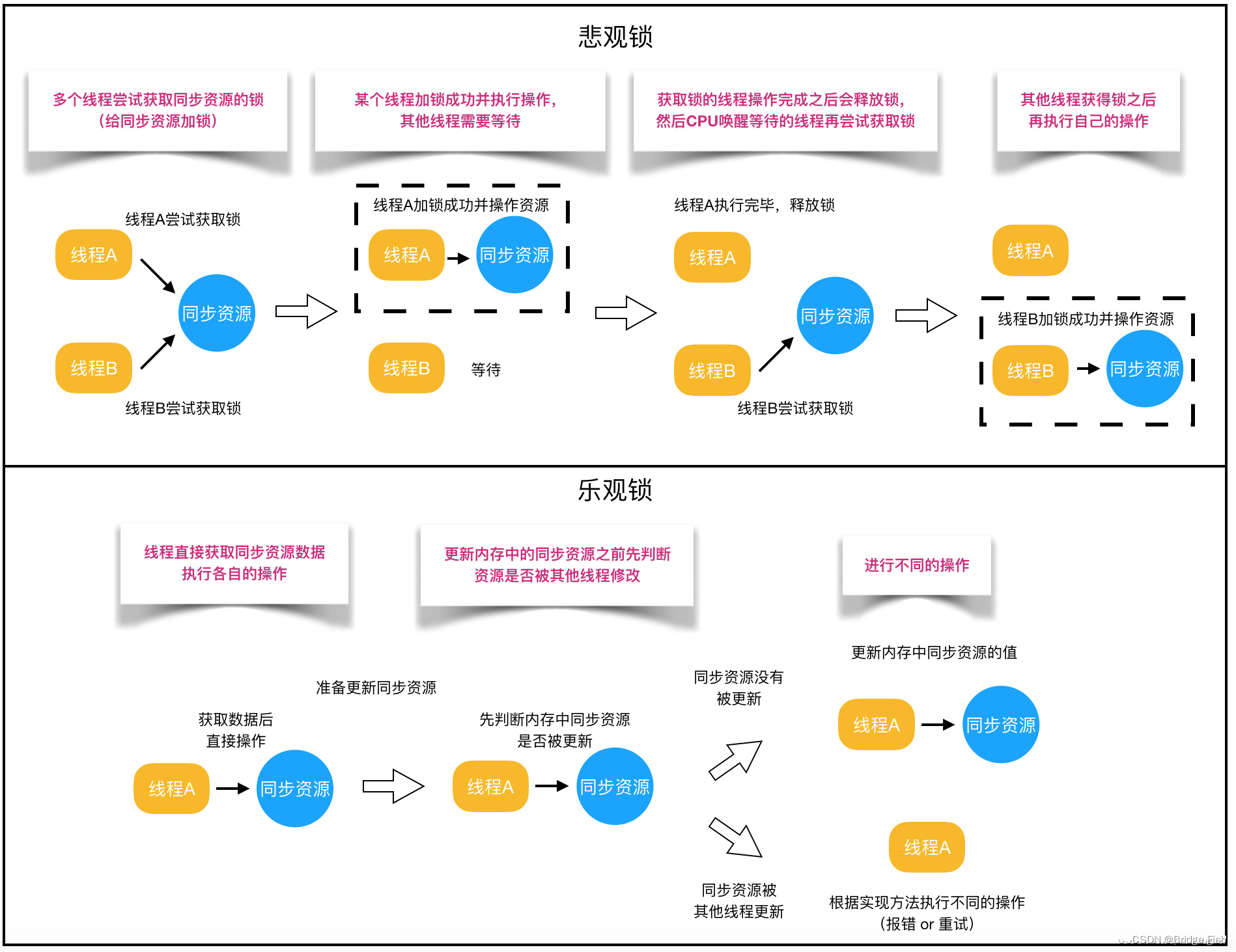
Java 悲观锁 乐观锁
锁可以从不同的角都分类。其中乐观锁和悲观锁是一种分类方式 一、悲观锁、乐观锁定义 悲观锁就是我们常说到的锁。对于悲观锁来说,他总是认为每次访问共享资源时会发生冲突,所以必须每次数据操作加上锁,以保证临界区的程序同一时间只能有一个…...
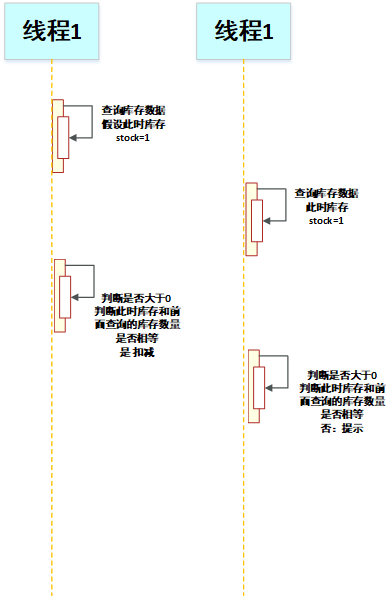
优惠券秒杀(二)
库存超卖问题分析 库存超卖问题其本质就是多个线程操作共享数据产生的线程安全问题,即当一个线程在执行操作共享数据的多条代码的过程中,其他线程也参与了进来,导致了线程安全问题的产生。例如:线程1发送请求,查询库存…...

强化学习在并行机构人形机器人控制中的应用
1. 项目概述在机器人控制领域,强化学习(RL)正逐渐成为解决复杂动力学系统问题的有力工具。然而,当面对具有并行驱动机构的人形机器人时,传统RL训练方法往往面临一个关键挑战:大多数仿真环境无法准确模拟闭环运动链(Closed Kinemat…...

Kerberos身份认证原理与企业级排错实战指南
1. 这不是“另一个登录框”,而是一套精密运转的身份验证齿轮系统很多人第一次听说 Kerberos,是在公司内网登录邮箱或访问内部系统时,看到那个带小盾牌图标的弹窗——“正在使用 Kerberos 协议进行身份验证”。于是下意识觉得:“哦…...

AMLP:基于大语言模型的自动化机器学习势函数构建平台
1. 项目概述:当AI遇见原子模拟,AMLP如何重塑机器学习势函数构建在计算材料科学和化学物理领域,分子动力学模拟是我们窥探微观世界动态行为的“显微镜”。无论是研究新材料的相变过程,还是探索生物大分子的折叠机制,其核…...
)
用Python+OpenCV手把手实现Prewitt边缘检测(附完整代码与效果对比图)
用PythonOpenCV手把手实现Prewitt边缘检测(附完整代码与效果对比图) 边缘检测是计算机视觉中最基础也最关键的预处理步骤之一。想象一下,当你需要让计算机"看清"一张照片中的物体轮廓时,边缘检测算法就是它的"视觉…...

2026年HR招聘偏好白皮书:这5项附加技能出现频率暴涨
2026 年的招聘市场,正在从“看你会什么岗位技能”,转向“看你能不能把岗位做得更智能”。HR筛简历时,越来越关注候选人的AI应用能力、数据化思维和业务落地能力。人社部近年发布的新职业中,已经出现生成式人工智能系统应用员、人工…...

[智能体-69]:重新认知MCP:协议不生产智能,只是AI全域交互的标准化基石
MCP只是提供了大模型、编排调度、外部工具能够进行结构化交流的标准,而整个系统的智能主要依赖编排调度,与外部软件系统的交互取决于外部工具,包括外部语音交互、视觉交互、数字化交互。当下MCP(Model Context Protocol࿰…...

飞书远程控机:OpenClaw配置全攻略
本文详细介绍如何通过 OpenClaw 工具对接飞书开放平台,配置智能机器人实现 Windows 电脑的远程控制。主要内容涵盖文件管理和程序启动等核心功能的实现方法,并提供完整的配置指南与常见问题解决方案。 一、使用前提说明 1. 系统要求 仅适用于 Windows…...

FM3773 低功耗离线式恒流/恒压 PSR 控制器
概述 FM3773 是一种高性能的交流/直流用于电池充电器和适配器的电源控制器,内置 850V 功率三极管。该设备采用脉冲频率调制(PFM)的方法来建立非连续导通模式(DCM)反激式电源。 FM3773 提供精确的恒定电压,恒…...

炉石传说自动对战助手:5分钟上手,彻底解放双手的终极指南
炉石传说自动对战助手:5分钟上手,彻底解放双手的终极指南 【免费下载链接】Hearthstone-Script Hearthstone script(炉石传说脚本) 项目地址: https://gitcode.com/gh_mirrors/he/Hearthstone-Script 还在为每天重复的炉石…...

终极歌词同步神器LRCGET:5分钟为你的音乐库添加完美歌词
终极歌词同步神器LRCGET:5分钟为你的音乐库添加完美歌词 【免费下载链接】lrcget Utility for mass-downloading LRC synced lyrics for your offline music library. 项目地址: https://gitcode.com/gh_mirrors/lr/lrcget 你是否厌倦了在听歌时手动搜索歌词…...