opencv hand openpose
使用opencv c++ 来调用caffemodel
使用opencv 得dnn 模块调用 caffemodel得程序,图片自己输入就行,不做过多得解释,看代码清单。


定义手指关节点
const int POSE_PAIRS[20][2] =
{
{0,1}, {1,2}, {2,3}, {3,4}, // thumb
{0,5}, {5,6}, {6,7}, {7,8}, // index
{0,9}, {9,10}, {10,11}, {11,12}, // middle
{0,13}, {13,14}, {14,15}, {15,16}, // ring
{0,17}, {17,18}, {18,19}, {19,20} // small
};
string protoFile = “hand/pose_deploy.prototxt”;
string weightsFile = “hand/pose_iter_102000.caffemodel”;
int nPoints = 22;
代码清单
#include <opencv2/dnn.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
#include <iostream>using namespace std;
using namespace cv;
using namespace cv::dnn;
#ifdef _DEBUG
#pragma comment(lib,"opencv_world455d.lib")
#else
#pragma comment(lib,"opencv_world455.lib")
#endifconst int POSE_PAIRS[20][2] =
{{0,1}, {1,2}, {2,3}, {3,4}, // thumb{0,5}, {5,6}, {6,7}, {7,8}, // index{0,9}, {9,10}, {10,11}, {11,12}, // middle{0,13}, {13,14}, {14,15}, {15,16}, // ring{0,17}, {17,18}, {18,19}, {19,20} // small
};string protoFile = "hand/pose_deploy.prototxt";
string weightsFile = "hand/pose_iter_102000.caffemodel";int nPoints = 22;int main(int argc, char **argv)
{string imageFile = "qianbo2.jpg";// Take arguments from commmand lineif (argc == 2){imageFile = argv[1];}float thresh = 0.01;Mat frame = imread(imageFile);Mat frameCopy = frame.clone();int frameWidth = frame.cols;int frameHeight = frame.rows;float aspect_ratio = frameWidth / (float)frameHeight;int inHeight = 368;int inWidth = (int(aspect_ratio*inHeight) * 8) / 8;cout << "inWidth = " << inWidth << " ; inHeight = " << inHeight << endl;double t = (double)cv::getTickCount();Net net = readNetFromCaffe(protoFile, weightsFile);Mat inpBlob = blobFromImage(frame, 1.0 / 255, Size(inWidth, inHeight), Scalar(0, 0, 0), false, false);net.setInput(inpBlob);Mat output = net.forward();int H = output.size[2];int W = output.size[3];// find the position of the body partsvector<Point> points(nPoints);for (int n = 0; n < nPoints; n++){// Probability map of corresponding body's part.Mat probMap(H, W, CV_32F, output.ptr(0, n));resize(probMap, probMap, Size(frameWidth, frameHeight));Point maxLoc;double prob;minMaxLoc(probMap, 0, &prob, 0, &maxLoc);if (prob > thresh){circle(frameCopy, cv::Point((int)maxLoc.x, (int)maxLoc.y), 8, Scalar(0, 255, 255), -1);cv::putText(frameCopy, cv::format("%d", n), cv::Point((int)maxLoc.x, (int)maxLoc.y), cv::FONT_HERSHEY_COMPLEX, 1, cv::Scalar(0, 0, 255), 2);}points[n] = maxLoc;}int nPairs = sizeof(POSE_PAIRS) / sizeof(POSE_PAIRS[0]);for (int n = 0; n < nPairs; n++){// lookup 2 connected body/hand partsPoint2f partA = points[POSE_PAIRS[n][0]];Point2f partB = points[POSE_PAIRS[n][1]];if (partA.x <= 0 || partA.y <= 0 || partB.x <= 0 || partB.y <= 0)continue;line(frame, partA, partB, Scalar(0, 255, 255), 8);circle(frame, partA, 8, Scalar(0, 0, 255), -1);circle(frame, partB, 8, Scalar(0, 0, 255), -1);}t = ((double)cv::getTickCount() - t) / cv::getTickFrequency();cout << "Time Taken = " << t << endl;imshow("Keypoints", frameCopy);imshow("Skeleton", frame);imwrite("out.jpg", frame);waitKey();return 0;
}
相关文章:
opencv hand openpose
使用opencv c 来调用caffemodel 使用opencv 得dnn 模块调用 caffemodel得程序,图片自己输入就行,不做过多得解释,看代码清单。 定义手指关节点 const int POSE_PAIRS[20][2] { {0,1}, {1,2}, {2,3}, {3,4}, // thumb {0,5}, {5,6}, {6,7}…...

flutter fl_chart 柱状图 柱条数量较多 实现左右滑动 固定y轴
一、引入插件 pub.dev:fl_chart package - All Versions 根据项目版本,安装可适配的 fl_chart 版本 二、官网柱状图示例 github参数配置:(x轴、y轴、边框、柱条数据、tooltip等) https://github.com/imaNNeo/fl_c…...

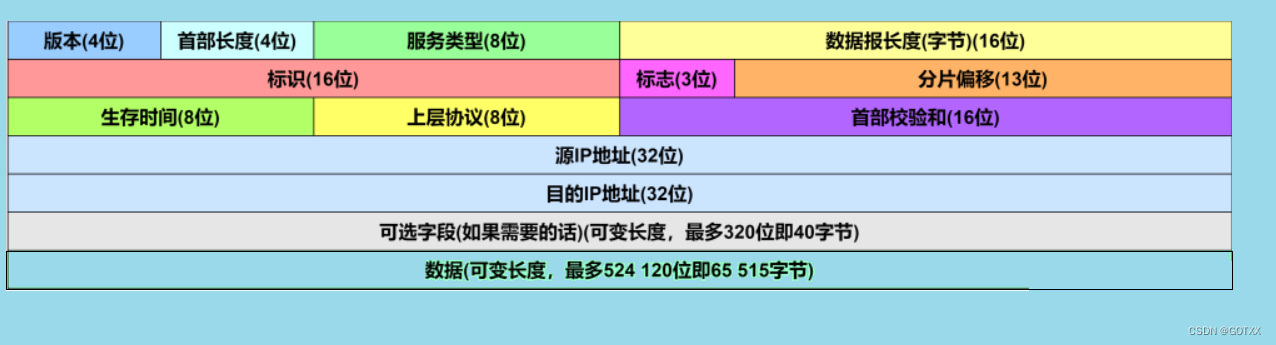
CAN学习笔记1:计算机网络
计算机网络 1 概述 计算机网络就是把多种形式的计算机用通信线路连接起来,并使其能够互相进行交换的系统。实际上,计算机网络包括了计算机、各种硬件、各种软件、组成网络的体系结构、网络传输介质和网络通信计数。因此,计算机网络是计算机…...

NAND flash的坏块
NAND flash的坏块 1.为什么会出现坏块 由于NAND Flash的工艺不能保证NAND的Memory Array(由NAND cell组成的阵列)在其生命周期中保持性能的可靠(电荷可能由于其他异常原因没有被锁起来。因此,在NAND的生产中及使用过程中会产生坏…...

代码随想录算法训练营第二十五天 | 读PDF复习环节3
读PDF复习环节3 本博客的内容只是做一个大概的记录,整个PDF看下来,内容上是不如代码随想录网站上的文章全面的,并且PDF中有些地方的描述,是很让我疑惑的,在困扰我很久后,无意间发现,其网站上的讲…...
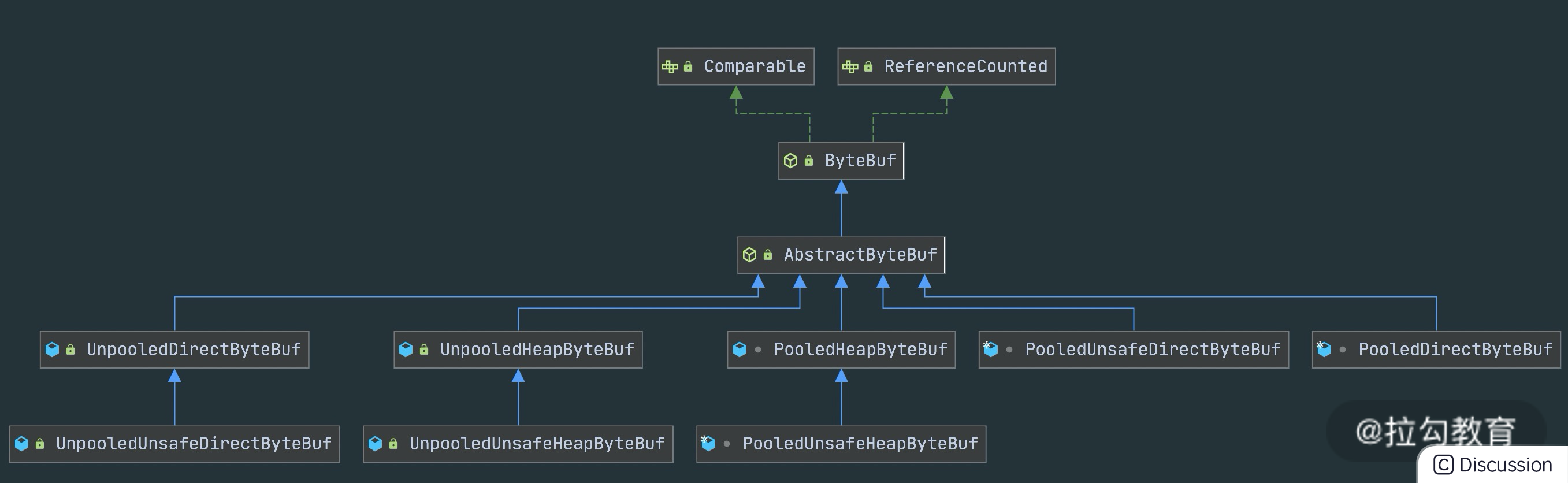
18.Netty源码之ByteBuf 详解
highlight: arduino-light ByteBuf 是 Netty 的数据容器,所有网络通信中字节流的传输都是通过 ByteBuf 完成的。 然而 JDK NIO 包中已经提供了类似的 ByteBuffer 类,为什么 Netty 还要去重复造轮子呢?本节课我会详细地讲解 ByteBuf。 JDK NIO…...
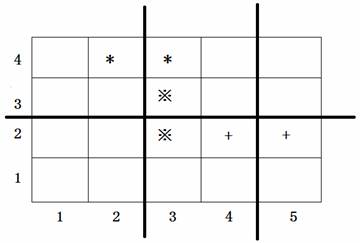
#P0999. [NOIP2008普及组] 排座椅
题目描述 上课的时候总会有一些同学和前后左右的人交头接耳,这是令小学班主任十分头疼的一件事情。不过,班主任小雪发现了一些有趣的现象,当同学们的座次确定下来之后,只有有限的 DD 对同学上课时会交头接耳。 同学们在教室中坐…...

Sentinel 容灾中心的使用
Sentinel 容灾中心的使用 往期文章 Nacos环境搭建Nacos注册中心的使用Nacos配置中心的使用 熔断/限流结果 Jar 生产者 spring-cloud-alibaba:2021.0.4.0 spring-boot:2.6.8 spring-cloud-loadbalancer:3.1.3 sentinel:2021.0…...

深度学习中简易FC和CNN搭建
TensorFlow是由谷歌开发的PyTorch是由Facebook人工智能研究院(Facebook AI Research)开发的 Torch和cuda版本的对应,手动安装较好 全连接FC(Batch*Num) 搭建建议网络: from torch import nnclass Mnist_NN(nn.Module):def __i…...

【多模态】20、OVR-CNN | 使用 caption 来实现开放词汇目标检测
文章目录 一、背景二、方法2.1 学习 视觉-语义 空间2.2 学习开放词汇目标检测 三、效果 论文:Open-Vocabulary Object Detection Using Captions 代码:https://github.com/alirezazareian/ovr-cnn 出处:CVPR2021 Oral 一、背景 目标检测数…...
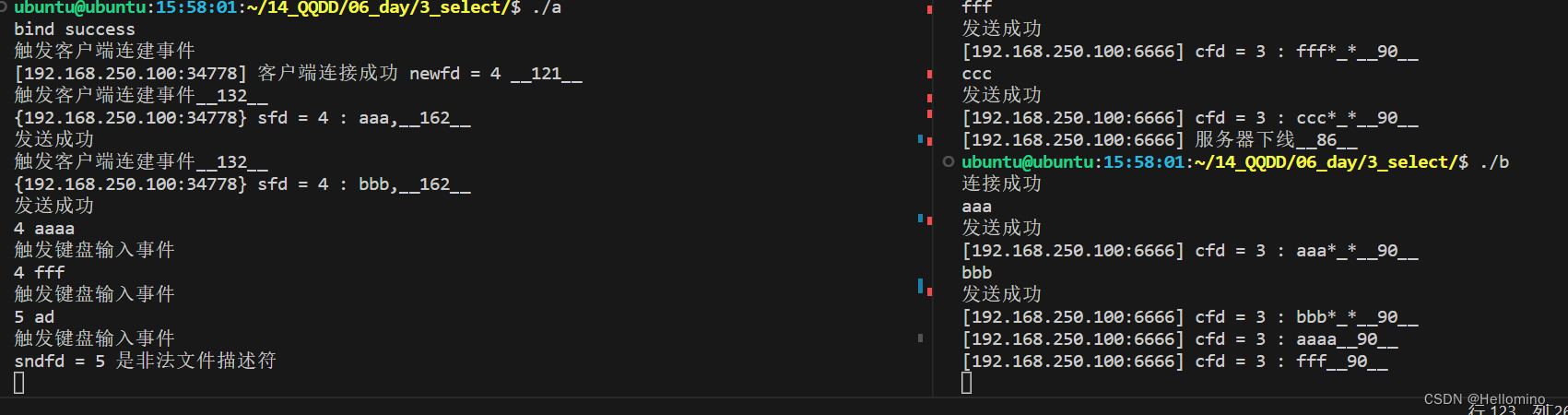
网络编程 IO多路复用 [select版] (TCP网络聊天室)
//head.h 头文件 //TcpGrpSer.c 服务器端 //TcpGrpUsr.c 客户端 select函数 功能:阻塞函数,让内核去监测集合中的文件描述符是否准备就绪,若准备就绪则解除阻塞。 原型: #include <sys/select.…...
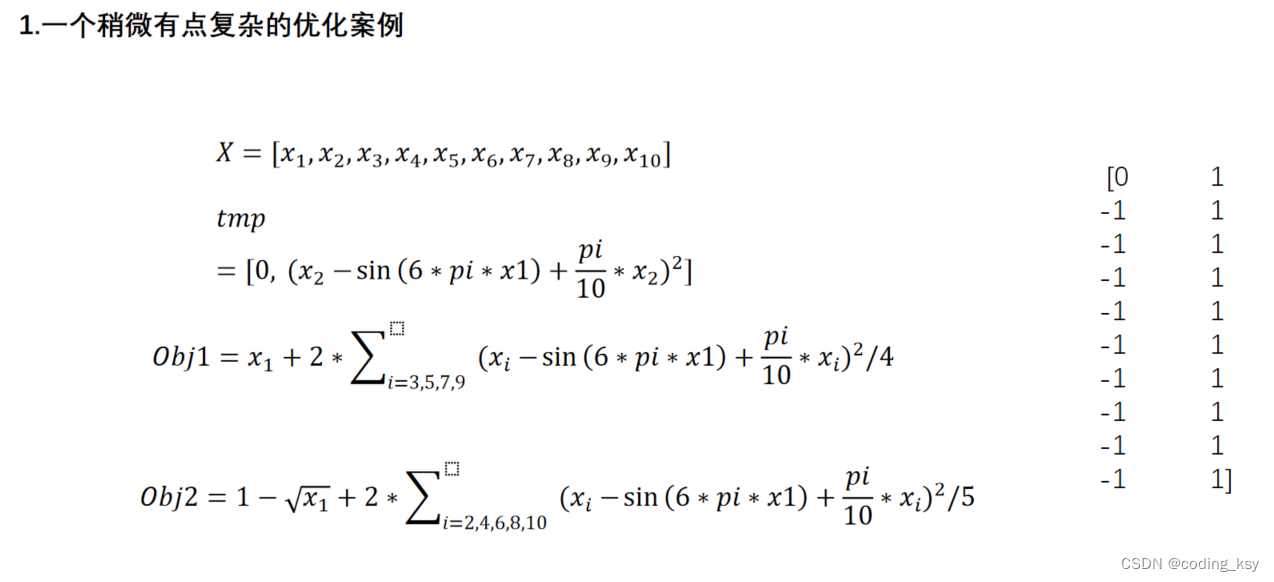
数学建模学习(7):单目标和多目标规划
优化问题描述 优化 优化算法是指在满足一定条件下,在众多方案中或者参数中最优方案,或者参数值,以使得某个或者多个功能指标达到最优,或使得系统的某些性能指标达到最大值或者最小值 线性规划 线性规划是指目标函数和约束都是线性的情况 [x,fval]linprog(f,A,b,Aeq,Beq,LB,U…...
Element UI如何自定义样式
简介 Element UI是一套非常完善的前端组件库,但是如何个性化定制其中的组件样式呢?今天我们就来聊一聊这个 举例 就拿最常见的按钮el-button来举例,一般来说默认是蓝底白字。效果图如下 可是我们想个性化定制,让他成为粉底红字应…...

protobuf入门实践2
如何在proto中定义一个rpc服务? syntax "proto3"; //声明protobuf的版本package fixbug; //声明了代码所在的包 (对于C来说就是namespace)//下面的选项,表示生成service服务类和rpc方法描述, 默认是不生成的 option cc_generi…...

adb shell使用总结
文章目录 日志记录系统概览adb 使用方式 adb命令日志过滤按照告警等级进行过滤按照tag进行过滤根据告警等级和tag进行联合过滤屏蔽系统和其他App干扰,仅仅关注App自身日志 查看“当前页面”Activity文件传输截屏和录屏安装、卸载App启动activity其他 日志记录系统概…...
-Tag的含义、Tag类型与其他的转换)
UG NX二次开发(C++)-Tag的含义、Tag类型与其他的转换
文章目录 1、前言2、Tag号的含义3、tag_t转换为int3、TaggedObject与Tag转换3.1 TaggedObject定义3.2 TaggedObject获取Tag3.3 根据Tag获取TaggedObject4.Tag与double类型的转换1、前言 在UG NX中,每个对象对应一个tag号,C++中,其类型是tag_t,一般是5位或者6位的int数字,…...
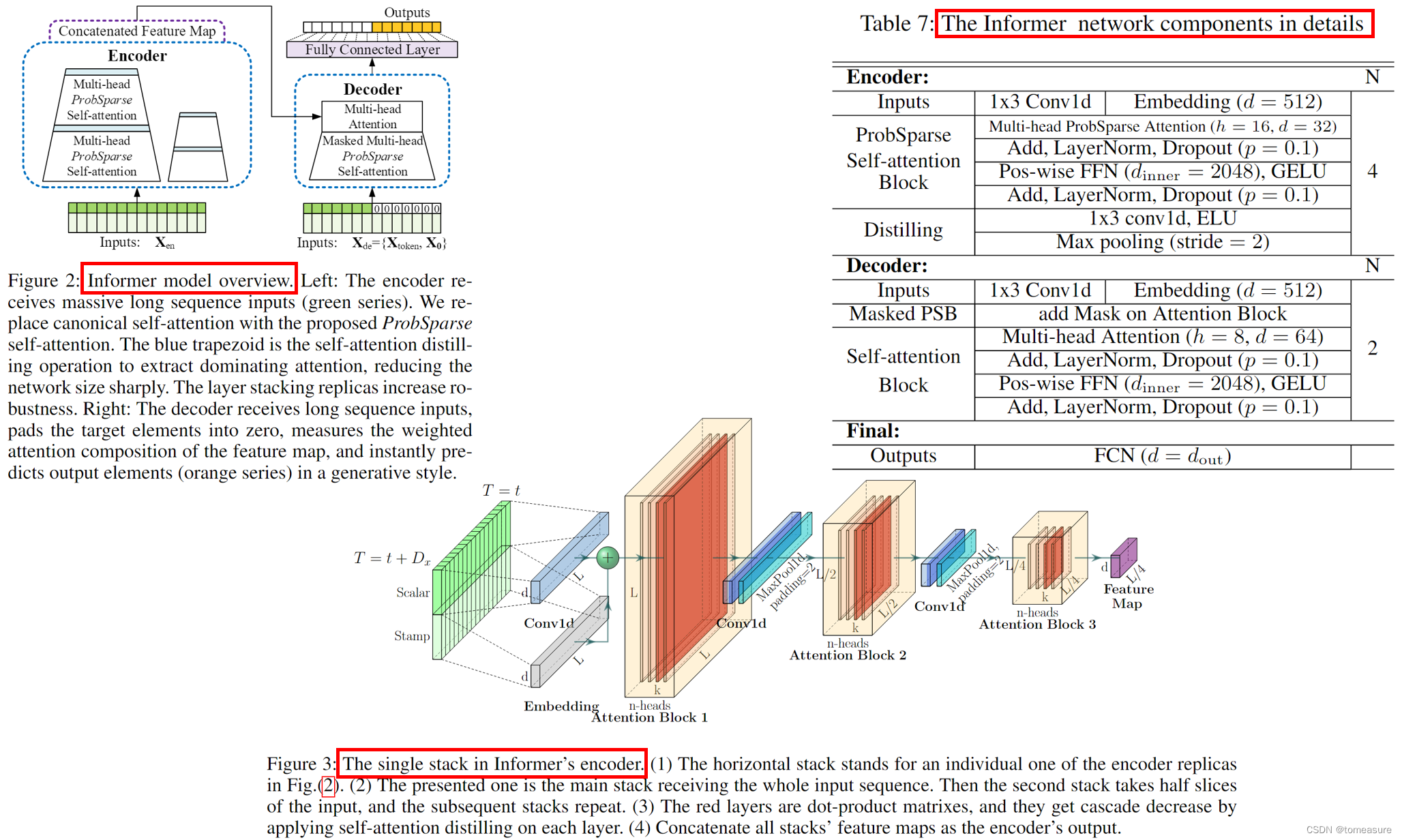
Informer 论文学习笔记
论文:《Informer: Beyond Efficient Transformer for Long Sequence Time-Series Forecasting》 代码:https://github.com/zhouhaoyi/Informer2020 地址:https://arxiv.org/abs/2012.07436v3 特点: 实现时间与空间复杂度为 O ( …...
c语言位段知识详解
本篇文章带来位段相关知识详细讲解! 如果您觉得文章不错,期待你的一键三连哦,你的鼓励是我创作的动力之源,让我们一起加油,一起奔跑,让我们顶峰相见!!! 目录 一.什么是…...
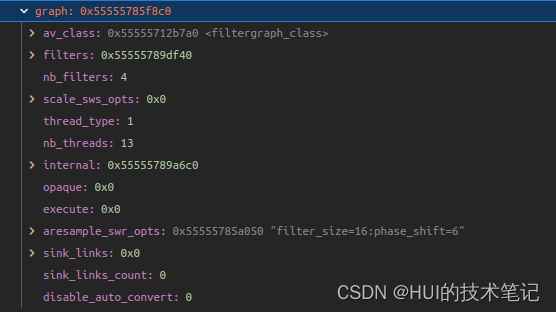
FFmpeg aresample_swr_opts的解析
ffmpeg option的解析 aresample_swr_opts是AVFilterGraph中的option。 static const AVOption filtergraph_options[] {{ "thread_type", "Allowed thread types", OFFSET(thread_type), AV_OPT_TYPE_FLAGS,{ .i64 AVFILTER_THREAD_SLICE }, 0, INT_MA…...
CAN学习笔记3:STM32 CAN控制器介绍
STM32 CAN控制器 1 概述 STM32 CAN控制器(bxCAN),支持CAN 2.0A 和 CAN 2.0B Active版本协议。CAN 2.0A 只能处理标准数据帧且扩展帧的内容会识别错误,而CAN 2.0B Active 可以处理标准数据帧和扩展数据帧。 2 bxCAN 特性 波特率…...

2026数字营销专业学数据分析的职业优势
一、数字营销与数据分析的融合趋势2026年数字营销领域将进一步依赖数据驱动决策。随着消费者行为数字化程度加深,企业需通过数据分析实现个性化营销、动态定价和实时优化。复合型人才需同时掌握营销策略与数据建模能力,以应对跨渠道归因、隐私安全等复杂…...

Ryujinx模拟器完整指南:在PC上免费畅玩Switch游戏的终极解决方案
Ryujinx模拟器完整指南:在PC上免费畅玩Switch游戏的终极解决方案 【免费下载链接】Ryujinx 用 C# 编写的实验性 Nintendo Switch 模拟器 项目地址: https://gitcode.com/GitHub_Trending/ry/Ryujinx 你是否曾经梦想在电脑上体验《塞尔达传说:王国…...

工业防爆监控技术解析与选型方案 —— 以吉林高危场景为例
一、引言在石油化工、矿山开采、海上作业等工业高危场景中,环境存在易燃易爆、高腐蚀、高粉尘、极端温度等特性,普通安防设备无法满足安全要求。防爆监控作为场景安全防控的核心终端,其技术设计、硬件选型、功能配置直接决定高危场景的风险防…...

AI答案优化效果可以靠哪些第三方数据验证?
先给结论:AI答案优化效果要做三层交叉验证AI 答案优化、GEO 服务的效果,不应只听服务商自述,也不适合只靠单张 AI 回答截图判断。更稳妥的做法,是用三层数据交叉验证:AI回答层数据:看品牌是否被提及、位置是…...

初创公司如何利用Taotoken快速构建多模型AI应用原型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 初创公司如何利用Taotoken快速构建多模型AI应用原型 对于资源有限的初创团队而言,验证一个AI产品想法的关键在于速度与…...

超聚变冲刺创业板:年营收582亿,净利10亿 拟募资80亿,估值超400亿
雷递网 雷建平 5月22日超聚变数字技术股份有限公司(简称:“超聚变”)日前递交招股书,准备在深交所创业板上市。超聚变计划募资80亿。其中,40.8亿用于新一代算力基础设施研发及产业化项目,20.3亿用于超聚变智…...

戴森球计划工厂蓝图架构深度解析:构建高效星际生产线的核心策略
戴森球计划工厂蓝图架构深度解析:构建高效星际生产线的核心策略 【免费下载链接】FactoryBluePrints 游戏戴森球计划的**工厂**蓝图仓库 项目地址: https://gitcode.com/GitHub_Trending/fa/FactoryBluePrints FactoryBluePrints 项目作为戴森球计划游戏中最…...

ABAP系统实现OAuth 2.0最小权限控制的原生方案
1. 这不是一次“配个Token就完事”的集成——为什么ABAP系统里OAuth 2.0落地总卡在“权限过宽”这道坎上你有没有遇到过这样的场景:前端调用SAP Fiori应用,后端ABAP系统需要校验用户身份和操作权限;团队决定上OAuth 2.0,理由很充分…...
)
【稀缺首发】全球仅12家头部科技公司验证的AI Agent机器学习架构(附可复用决策树模板)
更多请点击: https://kaifayun.com 第一章:AI Agent机器学习应用的范式跃迁 传统机器学习系统通常以静态模型为中心,依赖人工特征工程、离线训练与固定推理流程。而AI Agent的兴起正推动一场根本性范式跃迁:从“被动预测”转向“…...

GitHub加速终极指南:5分钟告别访问卡顿,让开发效率翻倍
GitHub加速终极指南:5分钟告别访问卡顿,让开发效率翻倍 【免费下载链接】FastGithub github定制版的dns服务,解析访问github最快的ip 项目地址: https://gitcode.com/gh_mirrors/fa/FastGithub 你是否经历过这样的场景:在关…...