ST官方基于米尔STM32MP135开发板培训课程(一)
本文将以Myirtech的MYD-YF13X以及STM32MP135F-DK为例,讲解如何使用STM32CubeMX结合Developer package实现最小系统启动。

1.开发准备
1.1 Developer package准备
a.Developer package下载:
https://www.st.com/en/embedded-software/stm32mp1dev.html
b.解压后进入source目录:

c.源码准备(可以根据每一个source目录下的README.HOW_TO.txt中第三点准备):
-
TFA源码
$> cd tf-a-stm32mp-v2.6-stm32mp-r2-r0
$> tar xf tf-a-stm32mp-v2.6-stm32mp-r2-r0.tar.xz
$> cd tf-a-stm32mp-v2.6-stm32mp-r2
$> for p in `ls -1 ../*.patch`; do patch -p1 < $p; done-
OP-TEE源码
$> cd optee-os-stm32mp-3.16.0-stm32mp-r2-r0
$> tar xf optee-os-stm32mp-3.16.0-stm32mp-r2-r0.tar.xz
$> cd optee-os-stm32mp-3.16.0-stm32mp-r2
$> tar xf ../fonts.tar.gz
$> for p in `ls -1 ../*.patch`; do patch -p1 < $p; done-
U-Boot源码
$> cd u-boot-stm32mp-v2021.10-stm32mp-r2-r0
$> tar xf u-boot-stm32mp-v2021.10-stm32mp-r2-r0.tar.xz
$> cd u-boot-stm32mp-v2021.10-stm32mp-r2
$> for p in `ls -1 ../*.patch`; do patch -p1 < $p; done -
Kernel源码
$> cd linux-stm32mp-5.15.67-stm32mp-r2-r0
$> tar xf linux-5.15.67.tar.xz
$> cd linux-5.15.67
$> for p in `ls -1 ../*.patch`; do patch -p1 < $p; done1.2 SDK安装
请阅读WIKI完成 Install_the_SDK。
1.3 STM32CubeProgrammer安装
请根据WIKI给出的命令/步骤安装 CubeProgrammer and libusb installation。
2.原理框图
首先看一下Myirtech的原理图框架:

从原理框图中可以得出以下硬件配置信息:
1.STM32MP135DAF7
2.DDR3L
3.分离式电源设计
4.支持QSPI NAND,SD卡启动
5.双千兆以太网口
6.USB Host
7.USB OTG (烧录用)
8.UART4 debug串口
9.外部时钟源,HSE(24MHz),LSE(32.768KHz)
3. STM32CubeMX项目创建
打开STM32CubeMX, 根据芯片的part number选择正确的芯片封装开始项目创建,例如:Myirtech使用的是STM32MP135DAF7,



点击“Generate Code”之后会生成一个近乎空的project,设备树结构:
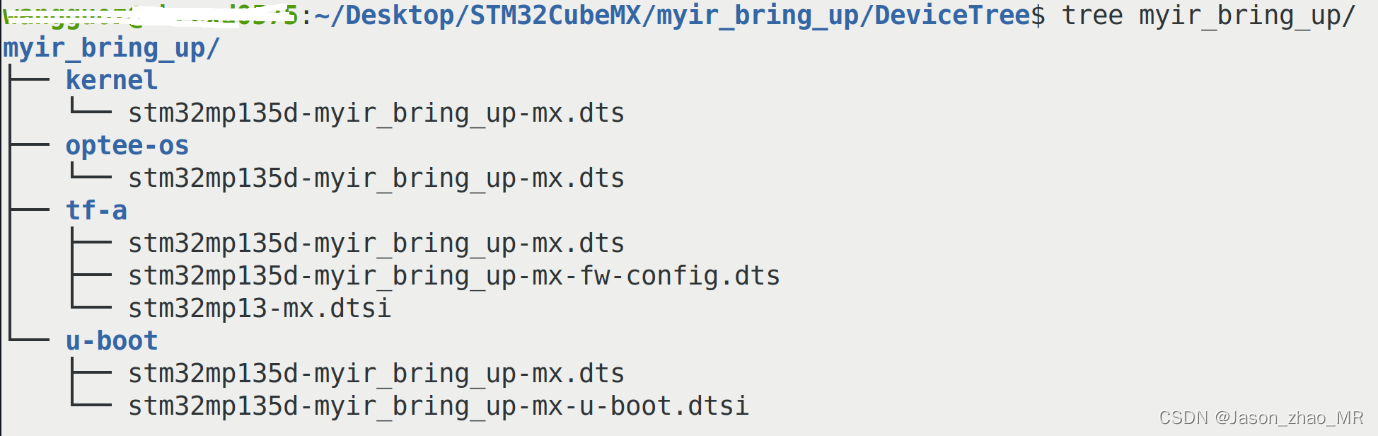
Note: STM32CubeMX的规则是先生成Kernel的dts, 然后将生成的dts文件拷贝到u-boot目录下,也就是说u-boot的设备树stm32mp135d-myir_bring_up-mx.dts是从kernel目录拷贝过来的,所以在U-Boot阶段修改设备树,添加User code时,请同步修改kernel的设备树或者将修改好的设备树拷贝到Kernel目录,防止下次使用CubeMX生成设备树的时候,u-boot部分的修改被kernel未修改的设备树覆盖。
创建设备树软链接:
-
TFA:
PC $> cd
PC $> ln -s /local/home/xxx/Desktop/STM32CubeMX/myir_bring_up/DeviceTree/myir_bring_up/tf-a/* fdts/-
OP-TEE:
PC $> cd
PC $> ln -s /local/home/xxx/Desktop/STM32CubeMX/myir_bring_up/DeviceTree/myir_bring_up/optee-os/* core/arch/arm/dts/-
U-Boot:
PC $> cd
PC $> ln -s /local/home/xxx/Desktop/STM32CubeMX/myir_bring_up/DeviceTree/myir_bring_up/u-boot/* arch/arm/dts/培训资料未完,请关注下一期文章。
相关文章:
ST官方基于米尔STM32MP135开发板培训课程(一)
本文将以Myirtech的MYD-YF13X以及STM32MP135F-DK为例,讲解如何使用STM32CubeMX结合Developer package实现最小系统启动。 1.开发准备 1.1 Developer package准备 a.Developer package下载: https://www.st.com/en/embedded-software/stm32mp1dev.ht…...
组件(lvs,keeplive,orm,mysql,分布式事务)
lvs LVS 已经集成到Linux内核系统中,ipvsadm 是 LVS 的命令行管理工具。 目前有三种 IP 负载均衡技术( VS/NAT 网络地址转换 、VS/TUN IP 隧道技术实现虚拟服务器 和 VS/DR 直接路由); 八种调度算法:轮询 …...

《视觉SLAM十四讲》报错信息和解决方案
文章目录 ch4-Sophus编译报错ch5/imageBasics安装opencv4.x报错ch5/joinMap/CMakeLists.txt编译报错ch5/joinMap-pcl_viewer map.pcd报错 ch4-Sophus编译报错 报错信息: error: lvalue required as left operand of assignmentunit_complex_.real() 1.;^~ error:…...

golang 设置http请求代理
tinypoxy 搭建http代理服务可参考:tinyproxy搭建http代理_wangxiaoangg的博客-CSDN博客 需求背景: 项目需要访问一国外服务接口,地址被墙。购买香港ecs服务器,并在上面搭建http代理服务。 一 使用http和https代理 func main() {pr…...
我的会议(会议通知)
前言: 我们在实现了发布会议功能,我的会议功能的基础上,继续来实现会议通知的功能。 4.1实现的特色功能: 当有会议要参加时,通过查询会议通知可以知道会议的内容,以及当前会议状态(未读) 4.2思路…...
css实现水平居中
代码示例 <div class"box"><div class"box1"></div> </div>1.弹性布局:(推荐) display:flex; 这些要添加在父级的,是父级的属性 //父级添加display:flex; //父级添加jus…...
c刷题(一)
目录 1.输出100以内3的倍数 2.将3个数从大到小输出 3.打印100~200素数 方法一 方法二 4.显示printf的返回值 最大公约数 试除法 辗转相除法 九九乘法表 求十个数的最大值 1.输出100以内3的倍数 法一: int n 0; while (n*3 < 100){printf("%d &q…...

webpack
文章目录 webpack概念打包的场景为什么要打包在打包之外 - 翻译在打包之外 - 小动作 课程重点模块化利用立即执行函数来改变 作用域模块化的优点模块化方案的进化史AMD(成型比较早,应用不是很广泛)COMMONJSES6 MODULE webpack 的打包机制webp…...

反复 Failed to connect to github.com port 443 after xxx ms
前提:使用了代理,浏览器能稳定访问github,但git clone一直超时 解决方案: 1. git config --global http.proxy http://127.0.0.1:1080 2. 代理设置端口1080 3. 1080可自定义 感谢来自这篇博客和评论区的提醒:解决…...

ARM裸机-11
1、安装交叉编译工具工具 1.1、windows中装软件的特点 windows中装软件使用安装包,安装包解压后有两种情况:一种是一个安装文件 (.exe/.msi),双击进行安装,下一步直到安装完毕。安装完毕后会在桌面上生成快捷方式,我们平时使用快…...

centos7升级glibc
作者:吴业亮 博客:wuyeliang.blog.csdn.net 安装bison: yum install bison -y安装wget、bzip2、gcc、gcc-c和glibc-headers: yum -y install wget bzip2 gcc gcc-c glibc-headers安装make-4.2.1: wget http://ftp.…...

【OnnxRuntime】在linux下编译并安装C++版本的onnx-runtime
目录 安装C接口的onnx-runtime安装依赖项:下载源文件构建ONNX Runtime安装ONNX Runtime 安装C接口的onnx-runtime 安装依赖项: 安装CMake:可以通过包管理器(如apt、yum等)安装CMake。 安装C编译器:确保系…...
 的 fftshift, ifftshift 函数的实现)
C#基于OpenCv(OpenCvSharp) 的 fftshift, ifftshift 函数的实现
本文实现基于OpenCv(OpenCvSharp) 的 fftshift, ifftshift 函数。 fftshift 函数将信号频谱的零频分量移动到数组中心, 本质是分别对调一三象限数据。 ifftshift完成相反的操作,本质是二四象限的数据块。 OpenCV中没有这两个函数如果使用需要自己实现。 实现代码如下: …...
【SpringBoot】笔记2
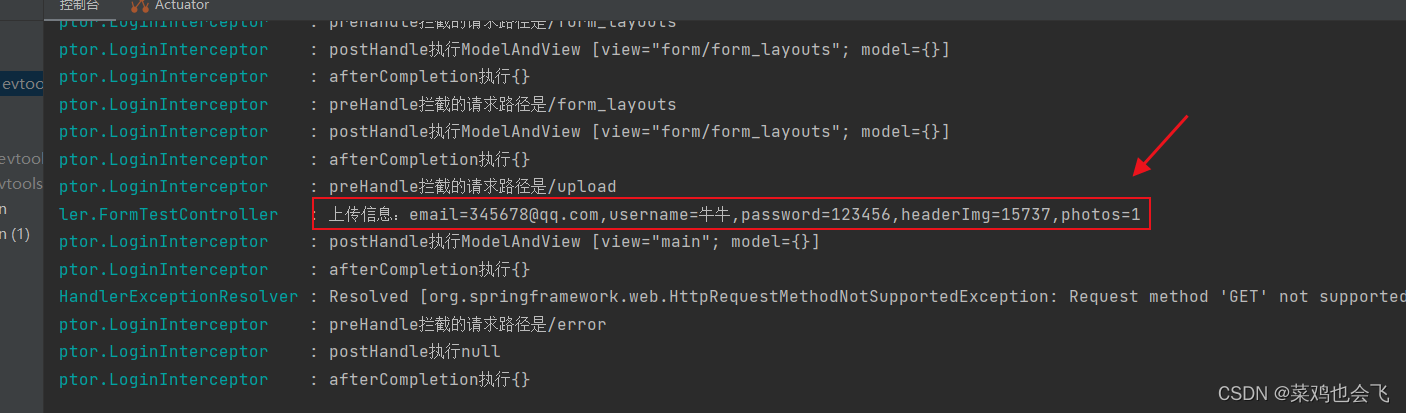
文章目录 45、web实验-抽取公共页面46、web实验-遍历数据与页面bug修改47、视图解析-【源码分析】-视图解析器与视图[暂时没看]48、拦截器-登录检查与静态资源放行49、拦截器-【源码分析】-拦截器的执行时机和原理50、文件上传-单文件与多文件上传的使用51、文件上传-【源码流程…...
Spring事务传播机制详细讲解
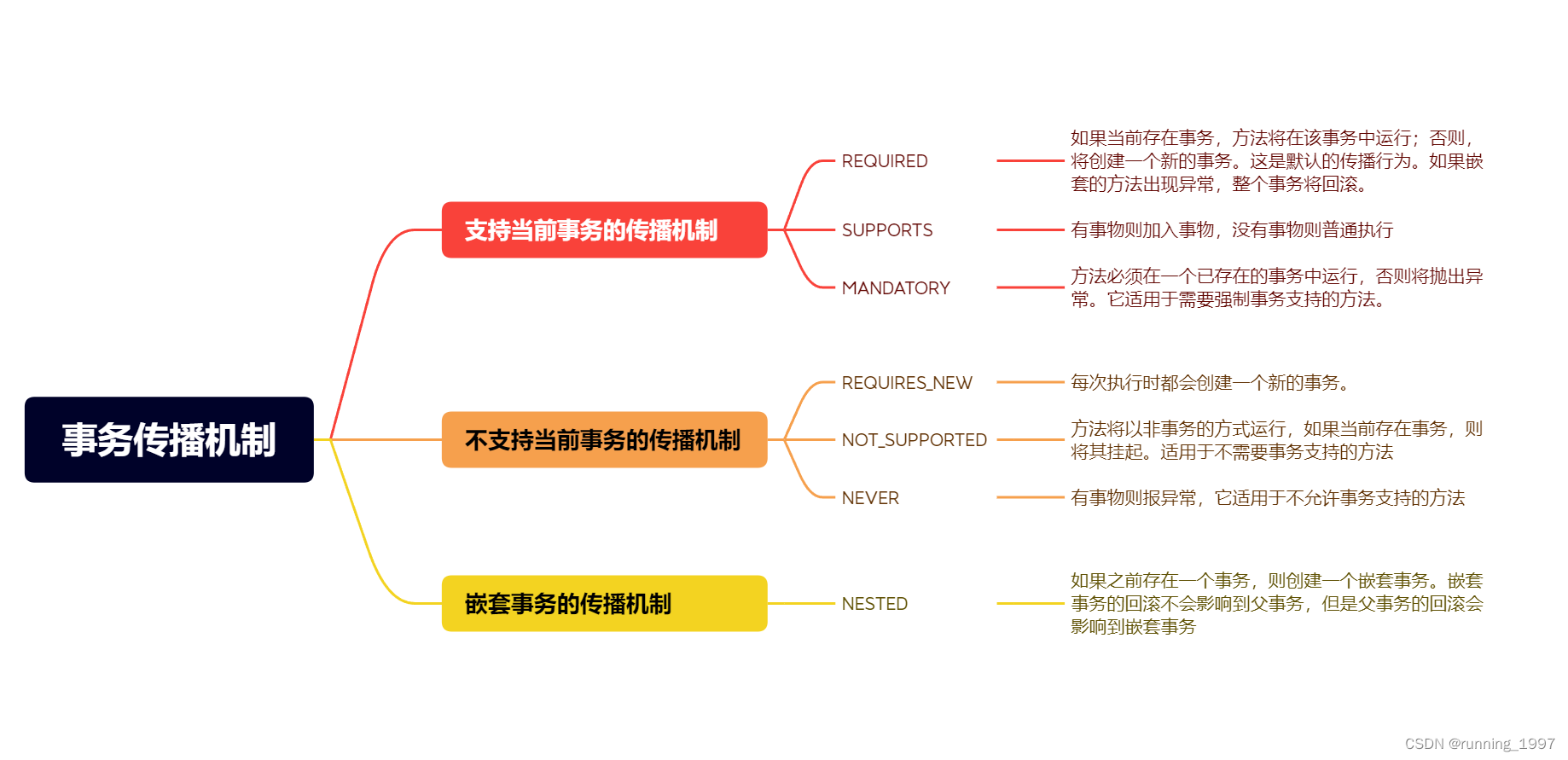
文章目录 一、事务传播机制1. REQUIRED:2. SUPPORTS:3. MANDATORY:4. REQUIRES_NEW:5. NOT_SUPPORTED:6. NEVER:7. NESTED: 二、事务传播机制分类1. 支持当前事务的传播机制:REQUIRE…...
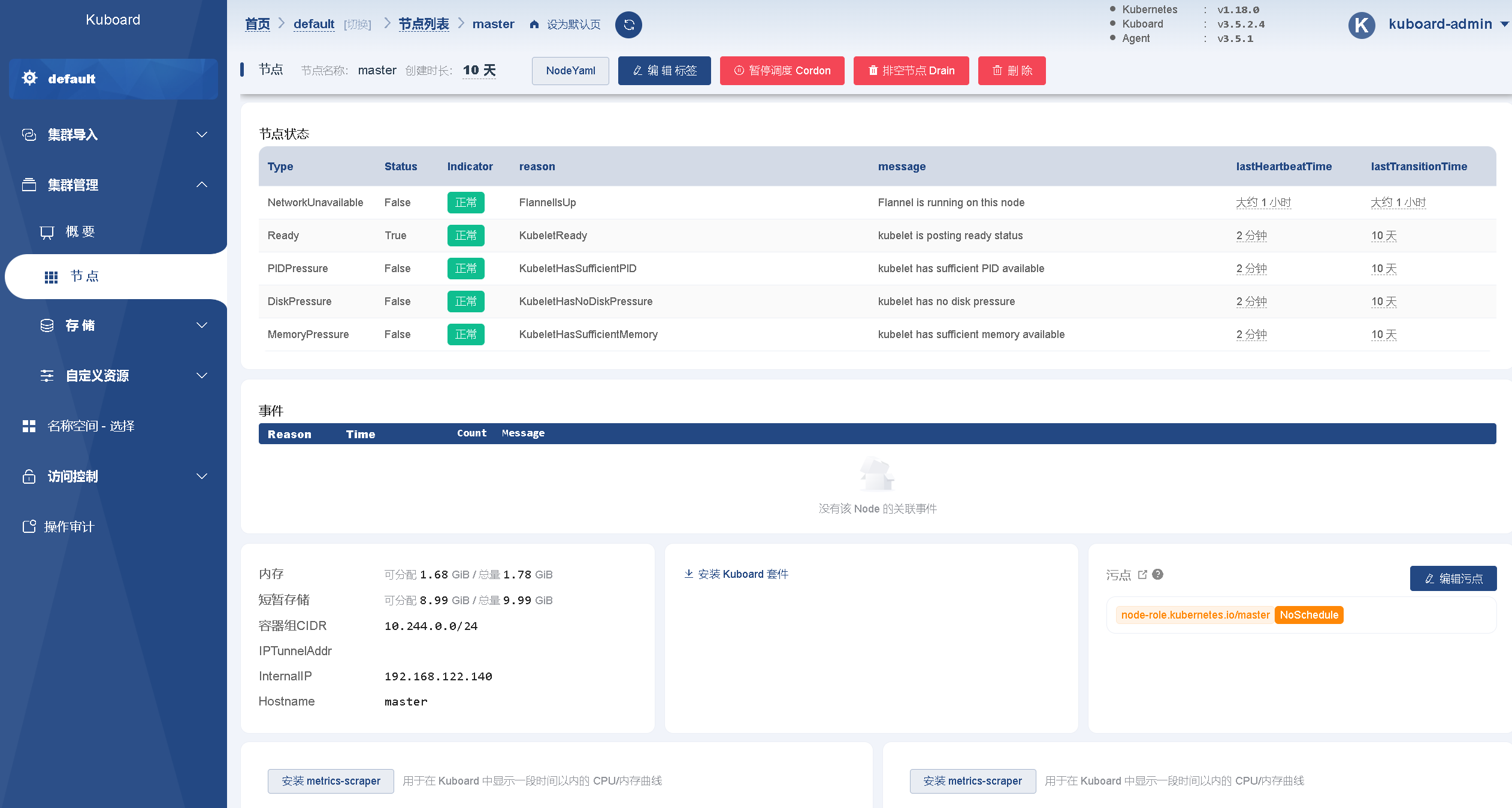
kubernetes 集群搭建(kubeadm 方式)
目前生产部署 Kubernetes 集群主要有两种方式: (1) kubeadm Kubeadm 是一个 Kubernetes 官方提供的命令行工具,可以用来部署和管理 Kubernetes 集群。它主要用于在新的 Kubernetes 环境中初始化集群、添加或删除节点等操作。 K…...
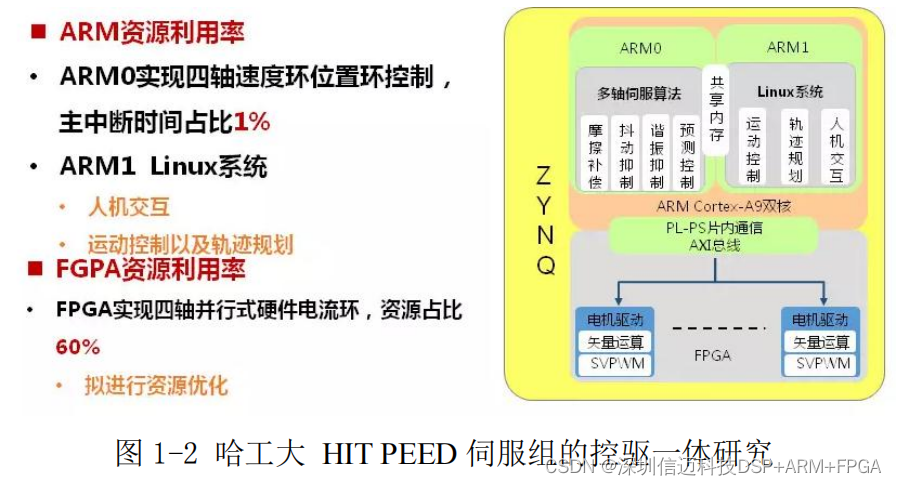
基于ARM+FPGA的驱控一体机器人控制器设计
目前市场上工业机器人,数控机床等多轴运动控制系统普遍采用运动控制器加 伺服驱动器的分布式控制方式。在这种控制方式中,控制器一方面完成人机交互,另 一方面进行 NC 代码的解释执行,插补运算,继而将计算出来的位…...
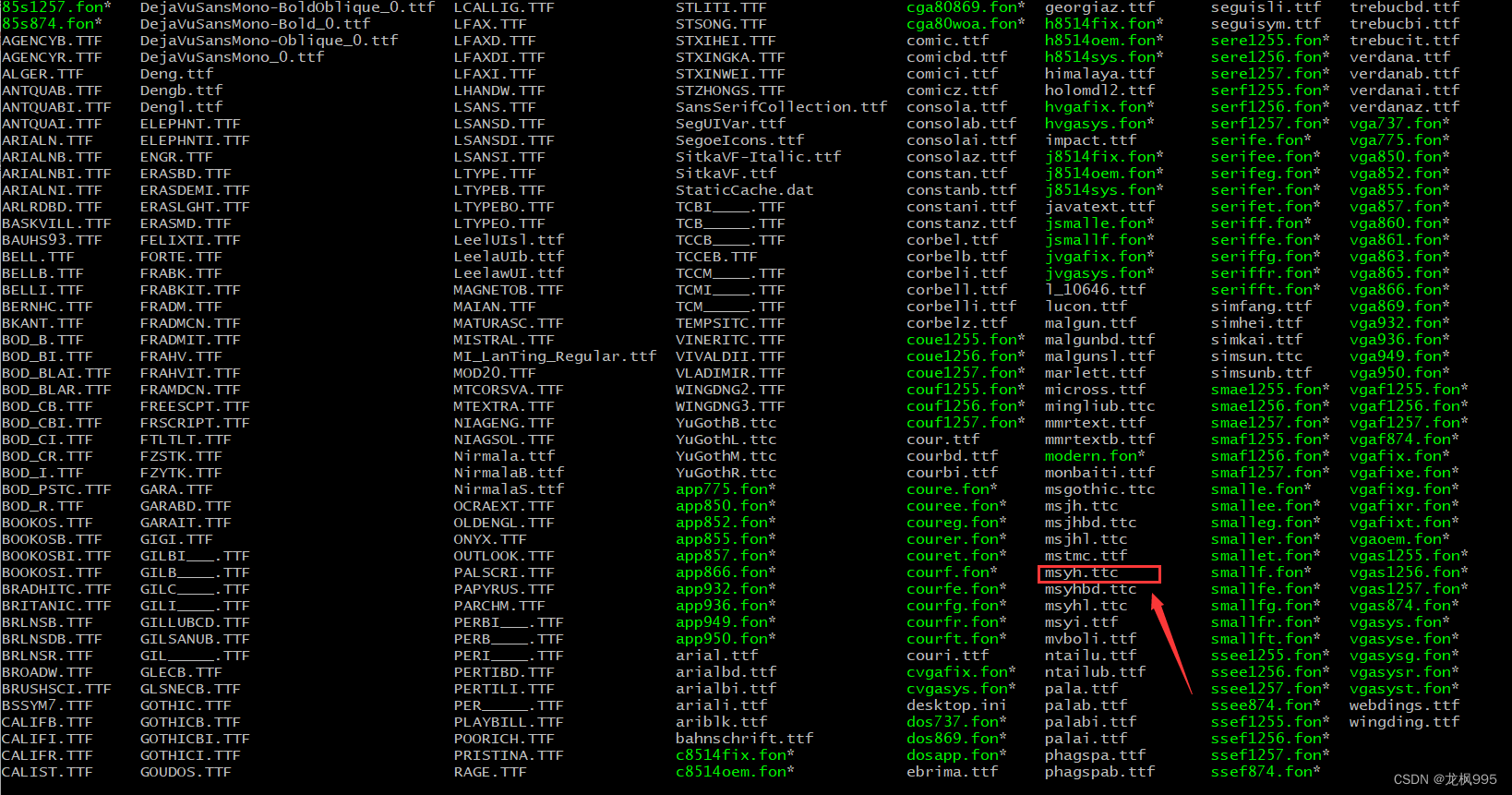
docker 安装 字体文件
先说一下我当前的 场景 及 环境,这样同学们可以先评估本篇文章是否有帮助。 环境: dockerphp8.1-fpmwindows 场景: 来了个需求,有一个默认背景图,可以理解为背景图是一个 "相框",相框里面就会放…...

Vue.js与ASP.NET的结合,实现企业级应用的开发和部署
在当今快速发展的互联网技术领域,企业级应用的开发和部署变得越来越重要。Vue.js和ASP.NET是两个在前端和后端开发中广泛使用的技术,将它们结合起来可以为企业级应用的开发和部署带来诸多优势。本文将通过代码示例介绍如何使用Vue.js和ASP.NET进行企业级…...

Uncaught SyntaxError: ‘‘ string literal contains an unescaped line break
今天在修改前端页面的时候,页面报错了,提示了这个信息 Uncaught SyntaxError: string literal contains an unescaped line break 问题指向这行代码,这就是通过JS渲染一个easyui的搜索框,仔细确认之后,发现没有任何问…...

ngx_http_read_request_header
1 定义 ngx_http_read_request_header 函数 定义在 ./nginx-1.24.0/src/http/ngx_http_request.cstatic ssize_t ngx_http_read_request_header(ngx_http_request_t *r) {ssize_t n;ngx_event_t *rev;ngx_connection_t *c;ngx_http_…...

2026届最火的五大AI论文助手推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 由于人工智能生成内容也就是AIGC被广泛运用,互联网里到处都是由AI生成的&#x…...

内容做了一大堆,流量就是起不来?初创公司低成本获流的真实解法
内容做了一大堆,流量就是起不来?初创公司低成本获流的真实解法 我见过太多这样的团队:每周雷打不动三篇公众号,两条短视频,外加若干条推特,数据面板安安静静,后台没有咨询,评论区只…...

LibreOffice Online 终极指南:如何在浏览器中实现免费办公协作
LibreOffice Online 终极指南:如何在浏览器中实现免费办公协作 【免费下载链接】online Read-only Mirror - no pull request (use https://gerrit.libreoffice.org instead) 项目地址: https://gitcode.com/gh_mirrors/onl/online 还在为昂贵的在线办公软件…...

Claude Code出质量事故了?Anthropic发了一篇有诚意的复盘|AI新岗位FDE爆火
每天更新,带你读懂科技圈。 今日看点: Anthropic 正式回应 Claude Code 质量下降的社区讨论,披露三条幕后原因;FDE(Forward Deployed Engineer)正在成为 AI 公司争抢的新岗位;Figma 自研 Redis …...

从网站点击到疾病预测:泊松回归模型在5个真实业务场景下的应用拆解与避坑指南
从网站点击到疾病预测:泊松回归模型在5个真实业务场景下的应用拆解与避坑指南 在数据驱动的商业决策中,计数型数据的分析往往被忽视。想象一下:电商平台每天需要决定发送多少条推送通知,客服中心要预测每小时可能接到的投诉电话数…...

3步零编程定制你的Windows系统:Windhawk终极指南
3步零编程定制你的Windows系统:Windhawk终极指南 【免费下载链接】windhawk The customization marketplace for Windows programs: https://windhawk.net/ 项目地址: https://gitcode.com/gh_mirrors/wi/windhawk 想要个性化Windows界面却不懂编程ÿ…...

ITK-SNAP医学图像分割:精准医疗影像分析的利器
ITK-SNAP医学图像分割:精准医疗影像分析的利器 【免费下载链接】itksnap ITK-SNAP medical image segmentation tool 项目地址: https://gitcode.com/gh_mirrors/it/itksnap 面对复杂的医学影像数据,如何快速准确地进行三维解剖结构分割ÿ…...

SysML v2系统建模语言:2025年模型驱动系统工程实战指南
SysML v2系统建模语言:2025年模型驱动系统工程实战指南 【免费下载链接】SysML-v2-Release The latest incremental release of SysML v2. Start here. 项目地址: https://gitcode.com/gh_mirrors/sy/SysML-v2-Release SysML v2系统建模语言作为新一代系统工…...

Spring Boot安全脚手架:openclaw-security-starter核心架构与实战指南
1. 项目概述:一个面向开发者的安全脚手架最近在梳理团队内部的安全开发规范时,发现一个普遍痛点:每个新项目启动,安全相关的配置总是东拼西凑,从依赖扫描、密钥管理到API安全策略,都得重新来一遍࿰…...