【2023年电赛】运动目标控制与自动追踪系统(E 题)最简单实现
本方案的思路是最简单的不涉及复杂算法:识别矩形框,标记矩形框,输出坐标和中心点,计算长度,控制舵机移动固定长度!仅供完成基础功能参考,不喜勿喷!
# 实现运动目标控制与自动追踪系统
## 任务概述
本文将介绍如何使用OpenMV开发板和舵机构建一个运动目标控制与自动追踪系统。该系统包括模拟目标运动的红色光斑位置控制系统和指示自动追踪的绿色光斑位置控制系统。通过本文的实现,我们可以在图像中识别目标,控制舵机沿着目标移动,并输出目标矩形框的中心位置和长度。
## 硬件准备
1. OpenMV H7 Plus开发板
2. 红色和绿色激光笔
3. 两个舵机(连接到OpenMV开发板)
## 硬件连接
将两个舵机分别连接到OpenMV开发板的舵机引脚(根据实际引脚选择)。
## 相机设置
在代码中,我们将相机设置为QVGA分辨率和RGB565格式。
import sensor, image, math, pyb# 初始化相机
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time=2000)# 其他代码...
## 目标检测与跟踪(目标检测部分代码实测过!)
### 寻找矩形函数
为了在图像中识别目标矩形框,我们需要编写一个寻找矩形函数。该函数将返回第二大的矩形区域,以便我们可以找到目标的位置。
# 寻找矩形函数,返回第二大的矩形区域
def find_second_largest_rectangle(blobs):max_area = 0max_blob = Nonesecond_max_area = 0second_max_blob = Nonefor blob in blobs:area = blob.area()if area > max_area:second_max_area = max_areasecond_max_blob = max_blobmax_area = areamax_blob = blobelif area > second_max_area:second_max_area = areasecond_max_blob = blobreturn second_max_blob
## 主循环
在主循环中,我们将不断获取图像并进行目标检测和跟踪。
while True:img = sensor.snapshot() # 获取图像blobs = img.find_blobs([black_threshold], pixels_threshold=200, area_threshold=200)if blobs:# 寻找第二大的矩形区域second_max_blob = find_second_largest_rectangle(blobs)if second_max_blob:img.draw_rectangle(second_max_blob.rect(), color=(255, 0, 0), thickness=4) # 绘制第二大的矩形框,颜色为红色# 其他代码...
## 舵机控制
为了实现目标跟踪,我们需要控制舵机使其沿着矩形框移动一圈,并回到中心点。这里我们使用了`pyb.Servo()`来控制舵机运动。
# 舵机参数
servo_pan_pin = 1 # 舵机1的引脚编号
servo_tilt_pin = 2 # 舵机2的引脚编号
servo_pan = pyb.Servo(servo_pan_pin) # 初始化舵机1
servo_tilt = pyb.Servo(servo_tilt_pin) # 初始化舵机2
servo_speed = 50 # 舵机转动速度(0-100,越大越快)
servo_pan_range = (0, 180) # 舵机1转动范围(角度)
servo_tilt_range = (0, 180) # 舵机2转动范围(角度)# 控制舵机沿着矩形框移动一圈,并回到中心点
for angle in range(servo_pan_range[0], servo_pan_range[1], servo_speed):servo_pan.angle(angle) # 控制舵机1水平旋转servo_tilt.angle(angle) # 控制舵机2垂直旋转pyb.delay(100) # 延时一段时间,控制舵机转动速度# 将舵机回到中心点
servo_pan.angle((servo_pan_range[0] + servo_pan_range[1]) // 2)
servo_tilt.angle((servo_tilt_range[0] + servo_tilt_range[1]) // 2)
## 结果输出
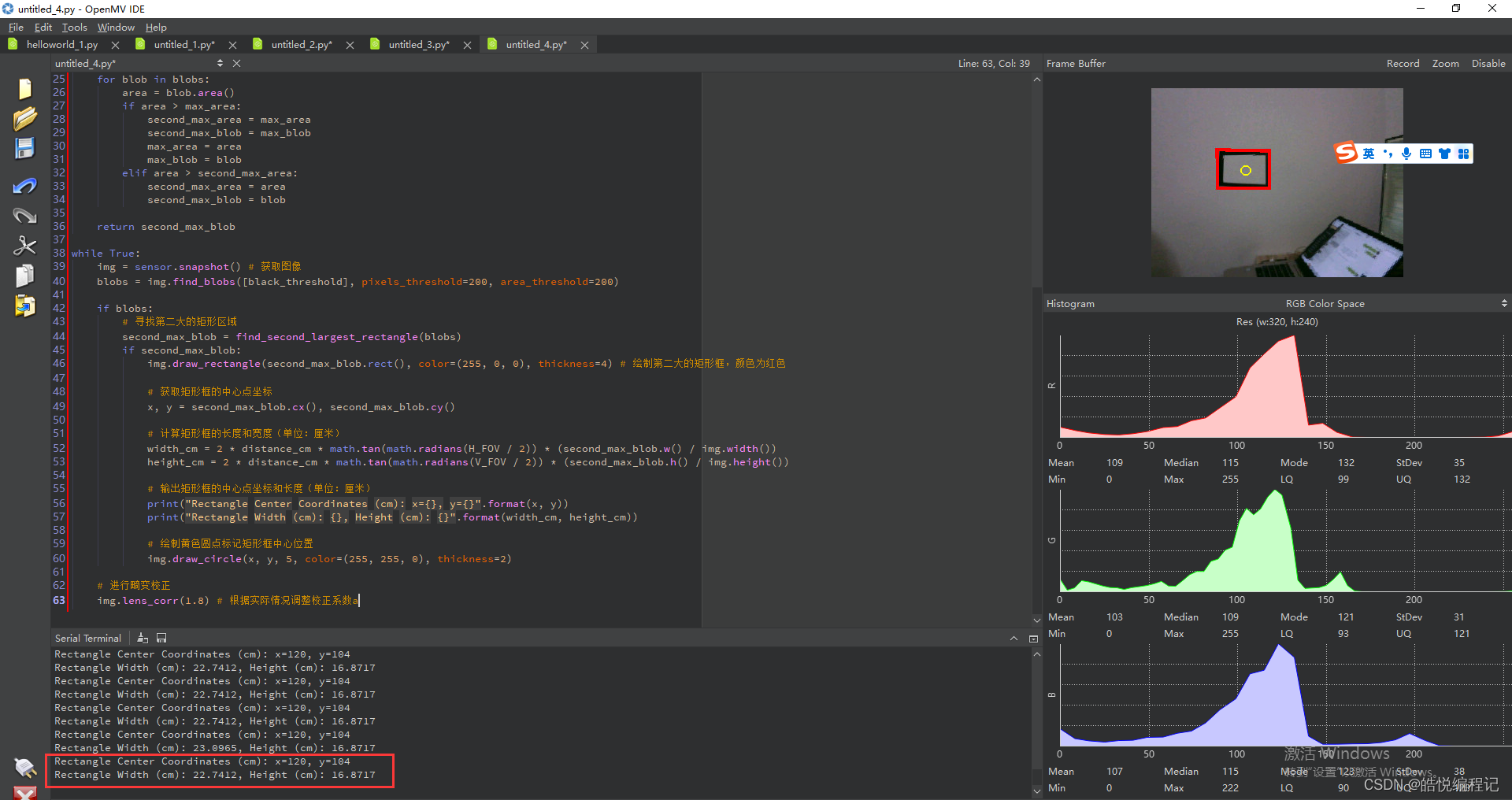
在检测到目标后,我们将输出目标矩形框的中心位置和长度。同时,我们会在图像中标记出矩形框的位置。(测试坐标和长度还是比较准备 )
# 获取矩形框的中心点坐标
x, y = second_max_blob.cx(), second_max_blob.cy()# 计算矩形框的长度和宽度(单位:厘米)
width_cm = 2 * distance_cm * math.tan(math.radians(H_FOV / 2)) * (second_max_blob.w() / img.width())
height_cm = 2 * distance_cm * math.tan(math.radians(V_FOV / 2)) * (second_max_blob.h() / img.height())# 输出矩形框的中心点坐标和长度(单位:厘米)
print("Rectangle Center Coordinates (cm): x={}, y={}".format(x, y))
print("Rectangle Width (cm): {}, Height (cm): {}".format(width_cm, height_cm))# 绘制黄色圆点标记矩形框中心位置
img.draw_circle(x, y, 5, color=(255, 255, 0), thickness=2)
## 运行效果
将硬件连接好后,上传代码到OpenMV开发板,并调整舵机参数和位置。运行代码后,你将看到舵机沿着目标矩形框移动,并在图像中标记出矩形框的位置和中心点。
## 结束语
通过本文的实现,我们成功搭建了一个运动目标控制与自动追踪系统。通过使用OpenMV开发板和舵机,我们能够在图像中识别目标,并控制舵机使其跟踪目标。
## 参考链接
1. OpenMV官方网站: https://openmv.io/
2. Pyb Servo文档: https://docs.openmv.io/library/pyb.Servo.html
欢迎大家提出宝贵的意见和建议,共同探讨学习和改进。谢谢阅读!
相关文章:
【2023年电赛】运动目标控制与自动追踪系统(E 题)最简单实现
本方案的思路是最简单的不涉及复杂算法:识别矩形框,标记矩形框,输出坐标和中心点,计算长度,控制舵机移动固定长度!仅供完成基础功能参考,不喜勿喷! # 实现运动目标控制与自动追踪系…...

【IMX6ULL驱动开发学习】22.IMX6ULL开发板读取ADC(以MQ-135为例)
IMX6ULL一共有两个ADC,每个ADC都有八个通道,但他们共用一个ADC控制器 1.设备树 在imx6ull.dtsi文件中已经帮我们定义好了adc1的节点部分信息 adc1: adc02198000 {compatible "fsl,imx6ul-adc", "fsl,vf610-adc";reg <0x0219…...

宝塔安装ModStart,快速开启高效开发之旅!
宝塔面板是一款强大的服务器管理工具,而ModStart则是基于Laravel的模块化快速开发框架,二者的结合将为您的项目开发带来前所未有的便利和高效。在这篇文章中,我们将为您详细介绍如何在宝塔面板上安装ModStart,让您快速搭建功能丰富…...
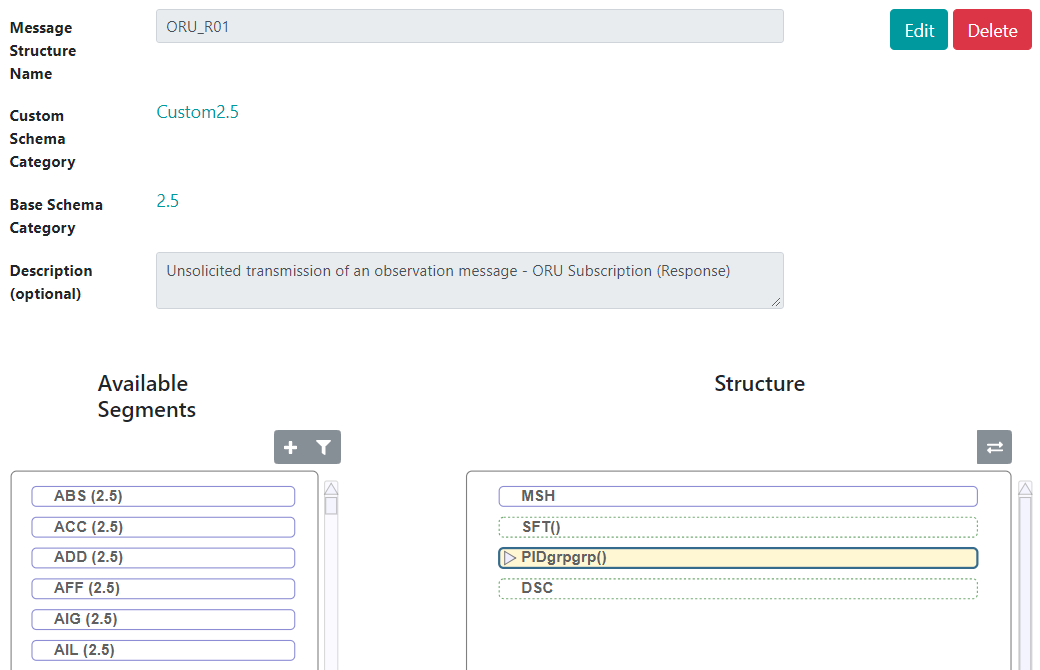
第六章 HL7 架构和可用工具 - 定义新的消息类型和结构类型
文章目录 第六章 HL7 架构和可用工具 - 定义新的消息类型和结构类型编辑数据结构和代码表 第六章 HL7 架构和可用工具 - 定义新的消息类型和结构类型 消息类型标识消息并与 HL7 MSH:9 字段中的值匹配。定义消息类型时,指定发送消息结构类型(可能与消息类…...

通向架构师的道路之Tomcat性能调优
一、总结前一天的学习 从“第三天”的性能测试一节中,我们得知了决定性能测试的几个重要指标,它们是: 吞吐量 Responsetime Cpuload MemoryUsage 我 们也在第三天的学习中对Apache做过了一定的优化,使其最优化上…...

vue03 es6中对数组的操作,vue对数据监控的原理(分别对对象和数组的监控)
在js中,对数组的操作一般都是固定的模式:常用的函数,具体的方法在这个文章中去看: http://t.csdn.cn/Fn1Ik 一般会用到的函数有: pop() 这个函数是表示把数组中的元素(数组ÿ…...

微信小程序 - 解析富文本插件版们
一、html2wxml 插件版 https://gitee.com/qwqoffice/html2wxml 申请使用注意事项 插件版本解析服务是由 QwqOffice 完成,存在不稳定因素,如对稳定性有很高的要求,请自行搭建解析服务,或在自家服务器上直接完成解析。对于有关插…...
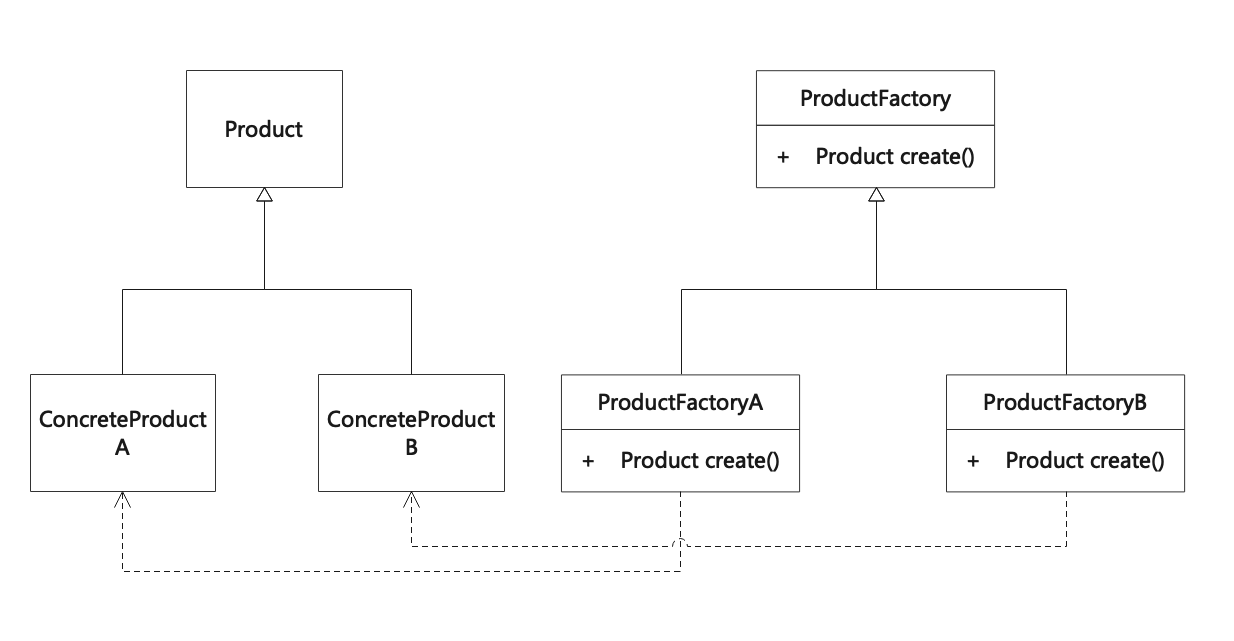
工厂方法模式(Factory Method)
工厂方法模式就是定义一个用于创建对象的接口,让子类决定实例化哪一个类。工厂方法模式将类的实例化(具体产品的创建)延迟到工厂类的子类(具体工厂)中完成,即由子工厂类来决定该实例化哪一个类。 Define a…...

js如何将图片转成BASE64编码,网页跟uniapp开发的app的区别?
Base64是一种用64个字符来表示任意二进制数据的方法,这篇文章主要为大家介绍了如何实现将图片转为base64格式,感兴趣的小伙伴可以学习一下 前言 前段时间在写我的VUE全栈项目的时候,遇到要把前端的照片上传到后端,再由后端存到数…...

1400*C. Computer Game
Example input 6 15 5 3 2 15 5 4 3 15 5 2 1 15 5 5 1 16 7 5 2 20 5 7 3 output 4 -1 5 2 0 1 解析: k个电, 第一种为 k>a 时,只玩游戏 k-a; 第二种,k>b,一边玩一边充电 k-b 问完成n轮游戏的情况下,优先第…...
)
windows10访问Ubuntu 18.04共享目录(已验证)
1、Ubuntu 18.04安装samba sudo apt-get install samba 2、创建一个共享目录文件夹,并设置777权限 ubt1804是用户名 mkdir/home/ubt1804/lsk sudo chmod 777 /home/ubt1804/lsk 3、添加用户及密码 sudo smbpasswd -a [用户名] 比如用户名为test sudo sm…...

Linux安装redis执行make命令报错:gcc not found和*** [adlist.o] Error 1
目录 第一章、问题分析与解决1.1)报错11.2)报错2 友情提醒 先看文章目录,大致了解文章知识点结构,点击文章目录可直接跳转到文章指定位置。 第一章、问题分析与解决 1.1)报错1 报错问题1:gcc: Command n…...

R语言glmnet包详解:横截面数据建模
R语言glmnet包详解:横截面数据建模 glmnet适用的模型glmnet建模补充glmnet适用的模型 glmnet程序包即适用于线性模型,也适用于添加惩罚项项的线性模型。如果数据中的变量个数大于样本量并且想用线性模型解决问题,那么glmnet再合适不过了! 根据glmnet函数中参数family的指定…...
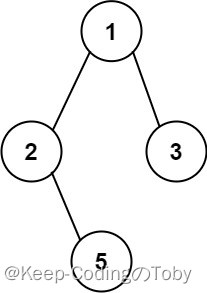
LeetCode257. 二叉树的所有路径
257. 二叉树的所有路径 文章目录 257. 二叉树的所有路径一、题目二、题解方法一:深度优先搜索递归方法二:迭代 一、题目 给你一个二叉树的根节点 root ,按 任意顺序 ,返回所有从根节点到叶子节点的路径。 叶子节点 是指没有子节点…...

ajax、axios、fetch的区别
ajax、axios、fetch 的区别 参考答案: ajax 是指一种创建交互式网页应用的网页开发技术,并且可以做到无需重新加载整个网页的情况下,能够更新部分网页,也叫作局部更新。 使用 ajax 发送请求是依靠于一个对象,叫 XmlHtt…...
Liunx开发工具
Liunx开发工具 1.Linux编辑器-vim使用1.1vim的基本概念1.2vim的基本操作1.3命令模式命令集1.3.1光标定位1.3.2光标移动1.3.3文本复制1.3.4文本操作 1.4插入模式命令集1.5底行模式命令集 2.vim配置3.sudo配置4.Linux编辑器-gcc/g使用4.1背景知识4.2gcc如何操作 5.函数库5.1函数库…...

Docker入门之运行Nginx案例
运行镜像 如果你直接安装会比较慢, 建议参照附录内容配置镜像之后再执行 # 执行命令过程一:下载容器镜像 docker run -d nginx:latest 命令解释 docker run 启动一个容器 -d 把容器镜像中需要执行的命令以daemon(守护进程)的方式运行 nginx…...
【深度学习环境】安装anaconda、tensorflow、pycharm
目录 1.安装anaconda 2.安装tensorflow-gpu 3.安装pycharm 4.VNC操作 5.安装Pytorch PS: linux下常见的操作: 1.Linux下强制关闭程序: 2.导出环境 2.1.pip导出 2.2.conda导出 2.3.其他 3.windows下的环境安装 & pycharm远程配置 4.bash…...

mockery 模拟
composer地址:mockery/mockery - Packagist github地址:地址 文档地址:Mockery — Mockery Docs 1.0-alpha documentation 根据文档介绍,mockery是php mock对象框架。根据js的mock框架的作用,估计mockery也是通过创…...
汽车后视镜反射率检测系统
随着社会的快速发展和物质生活的提供,机动车越来越普及,道路行车安全日益重要。为了保障机动车辆和行人的安全,在行车时不断观察后方和两侧的图像尤为重要。机动车后视镜通过反射镜面可以提供在规定视野内后方和两侧的图像,从而提…...

内网环境下Win7系统批量离线补丁部署实战指南
1. 内网Win7补丁部署的挑战与解决方案老旧Win7系统在内网环境中的安全隐患就像漏雨的屋顶,看似不影响日常使用,但随时可能引发严重后果。我经手过几十家单位的系统加固项目,发现这些场景存在三个典型痛点:首先是补丁来源问题&…...

解密高校教师必会的Gemini 3.1 Pro五大科研隐藏技能:从论文评估到创新点锁定
各位同仁好,我是七哥。一个在高校里从事人工智能相关领域研究,钻研用大模型AI实操的学术人。可以和七哥交流学术写作或Gemini、GPT、Claude等大模型学术实操相关问题,多多交流,相互成就,共同进步。 科研路上,有人发完顶刊顺利晋升,有人还在为创新点抓耳挠腮。 大多数教…...

约束感知图缩减算法在量子优化中的应用
1. 约束感知图缩减算法概述在量子计算领域,资源受限一直是制约算法实际应用的主要瓶颈。以当前主流的超导量子计算机为例,其量子比特数通常在50-100个之间,且存在显著的噪声干扰。这种硬件限制使得许多经典优化问题难以直接映射到量子设备上求…...

操作符从浅入深的讲解
1. 操作符的分类 2. ⼆进制和进制转换 3. 原码、反码、补码 4. 移位操作符 5. 位操作符:&、|、^、~ 6. 单⽬操作符 7. 逗号表达式 8. 下标访问[]、函数调⽤() 9. 结构成员访问操作符 10. 操作符的属性:优先级、结合性 11. 表达式求值1.操作符的分类以…...
)
告别KITTI!用TartanAir数据集在Unreal Engine仿真环境里“虐”你的VSLAM算法(附保姆级下载与使用指南)
用TartanAir数据集在Unreal Engine中打造VSLAM算法的"极限考场"当你的视觉SLAM算法在KITTI数据集上跑出98%的准确率时,是否意味着它已经准备好应对真实世界的复杂场景?现实往往会给乐观的开发者当头一棒——实验室里的"优等生"在遇到…...

Claude Code + LM Studio + CC-Switch 本地自动化编程部署指南
Claude Code LM Studio CC-Switch 本地自动化编程部署指南 本指南汇总了在 Windows 本地环境下,使用 Claude Code 配合 LM Studio 本地模型、CC-Switch 代理进行自动化编程开发的完整配置方案。 目录 硬件与模型选型LM Studio 本地模型部署CC-Switch 代理配置Cla…...

ThingLinks-IoT:一站式物联网平台解决方案
ThingLinks-IoT 物联网平台 | 多协议接入物模型告警联动视频接入AI 助手 一体化方案 一个面向项目交付与企业生产场景的国产物联网中台——把"设备接入 → 数据处理 → 告警联动 → 业务集成"这条链路上的通用能力一次性做完做稳,让你只关心自己的业务。 …...

终极鼠标连点器MouseClick:5分钟免费获取完整使用指南
终极鼠标连点器MouseClick:5分钟免费获取完整使用指南 【免费下载链接】MouseClick 🖱️ MouseClick 🖱️ 是一款功能强大的鼠标连点器和管理工具,采用 QT Widget 开发 ,具备跨平台兼容性 。软件界面美观 ,…...

AI写文章,你的创作新伙伴
你有没有想过,有一天写文章这件事可以变得像聊天一样轻松?别急着摇头,前阵子我在一个写作论坛里翻到一篇帖子,楼主问大家每天写稿累不累,结果底下好多人分享说,他们现在都靠工具来辅助了。而其中被提到最多…...

如何通过Equalizer APO实现Windows系统级音频均衡器专业调校:从快速上手到高级校准的完整指南
如何通过Equalizer APO实现Windows系统级音频均衡器专业调校:从快速上手到高级校准的完整指南 【免费下载链接】equalizerapo Equalizer APO mirror 项目地址: https://gitcode.com/gh_mirrors/eq/equalizerapo Equalizer APO是一款功能强大的Windows系统级开…...