三、从官方源码精简出第1个FreeRTOS
1、官方源码下载
(1)进入FreeRTOS官网:FreeRTOS官网
(2)点击下载FreeRTOS。

(3)选择待示例的项目进行下载。

2、删减目录
(1)下载后解压的FreeRTOS文件如下图所示。
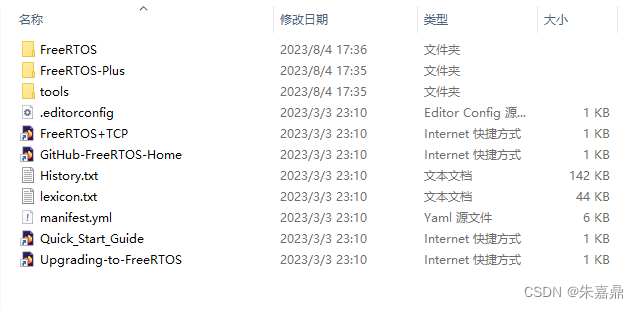
(2)删除下图中红框勾选的文件。

(3)删除"FreeRTOSv202212.01\FreeRTOS\Demo"目录下用不到的示例工程。

(4)删除“FreeRTOS-Plus”整个文件,FreeRTOS的生态文件,非比需的。

(5)删除“tools”整个文件,这里面是亚马逊相关的文件,我们也不需要。

(6)"FreeRTOSv202212.01\FreeRTOS\Source\portable"目录下只保留如下两个文件夹,其他全部删掉。

(7)"FreeRTOSv202212.01\FreeRTOS\Source\portable\RVDS"目录下只保留如下一个文件夹,其他全部删掉。
 (8)删除后文件后,部分文件目录如下。(由目录树生成工具zDirTree生成)。、
(8)删除后文件后,部分文件目录如下。(由目录树生成工具zDirTree生成)。、
E:\RTOS\官方源码\FreeRTOSv202212.01
├FreeRTOS
│ ├Demo // 预先制作好的示例工程
│ │ ├CORTEX_STM32F103_Keil // STM32F103在keil环境下的工程文件
│ │ │ ├FreeRTOSConfig.h
│ │ │ ├...
│ ├License
│ ├Source
│ │ ├croutine.c // 核心文件
│ │ ├event_groups.c // 核心文件
│ │ ├list.c // 核心文件
│ │ ├queue.c // 核心文件
│ │ ├stream_buffer.c // 核心文件
│ │ ├tasks.c // 核心文件
│ │ ├timers.c // 核心文件
│ │ ├include
│ │ ├portable // 移植时需要实现的文件
│ │ │ ├MemMang // 内存管理
│ │ │ │ ├heap_1.c
│ │ │ │ ├heap_2.c
│ │ │ │ ├heap_3.c
│ │ │ │ ├heap_4.c
│ │ │ │ ├heap_5.c
│ │ │ │ ├ReadMe.url
│ │ │ ├RVDS // IDE为RVD或keil
│ │ │ │ ├ARM_CM3 // CortexM3架构
│ │ │ │ │ ├port.c
│ │ │ │ │ ├portmacro.h
│ ├Test3、编译
3.1、首次编译
(1)打开工程。
 (2)弹出如下对话框,说明该工程是用KeilMDK4创建的。点击“Migrate to Device Pack”更新为KeilMDK5。
(2)弹出如下对话框,说明该工程是用KeilMDK4创建的。点击“Migrate to Device Pack”更新为KeilMDK5。

(3)弹出对话框,点击“确定”。
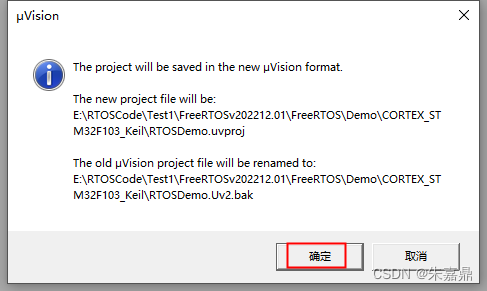
(4)更新后,关闭工程再重新打开。编译情况如下。
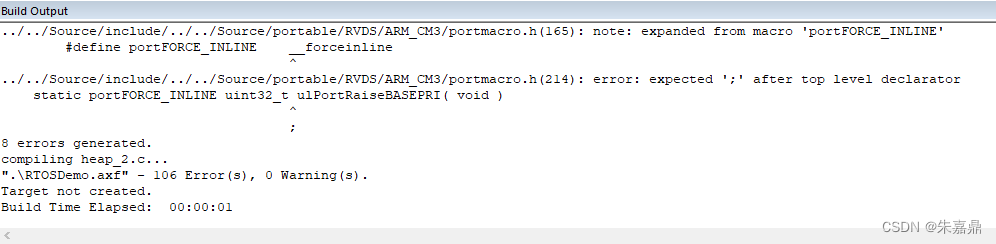
(5)编译后报错106,明显不正常。该程序原本是Keil4MDK中编写的,更新为KeilMDK5出现的问题。
3.2、IDE更新后程序报错
(1)KeilMDK4中使用的编译器是"Missing: Compiler Version 5",而KeilMDK5中该编译器默认是不安装的。解决思路就是安装该编译器在编译试试。(ARM Comliler是ARM编译器的意思)

(2)V5编译器的下载,参考链接。
- 我使用阿里云盘无法创建分享链接
- 可以从安装了KeilMDK4的电脑上找,查找路径后下文安装路径相同
- 网上搜索查找下载
(3)将下载“ARMCC文件”拷贝至Keil安装路径下的“ARM”文件夹中。

(4)打开一个Keil工程,点击如下图标。
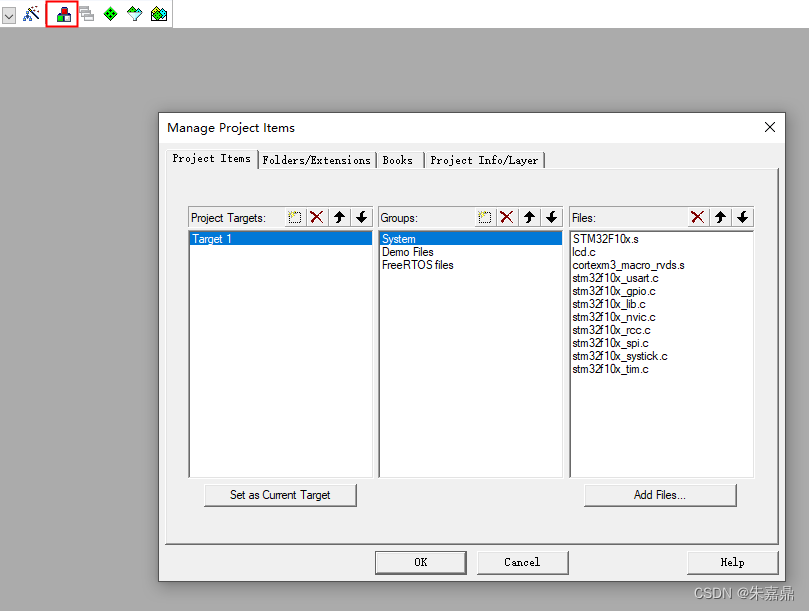
(5)点击“Folders/Extensions”,在点击“...”,出现右侧弹窗。
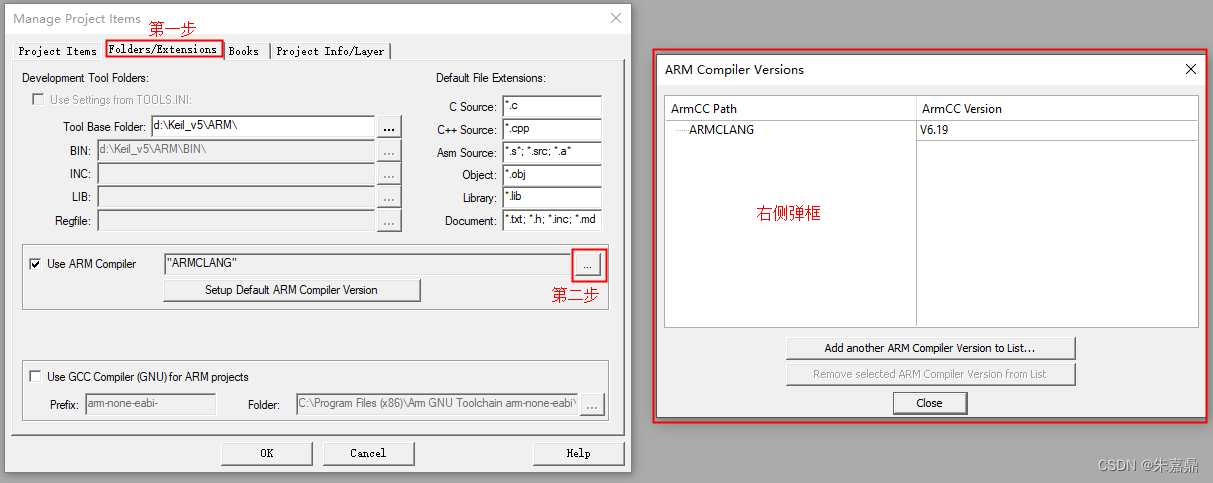 (6)点击“Add another...”,找到我们Keil安装路径下的ARMCC文件,点击“确定”。
(6)点击“Add another...”,找到我们Keil安装路径下的ARMCC文件,点击“确定”。

(7)出现如下图所示V5编译器,点击一下红框,在点“Close”,至此ARMV5编译器安装完成。

(8)选择V5编译器,再次编译项目,编译结果如下。
 3.3、Common目录错误解决
3.3、Common目录错误解决
(1)根据上图,说明Common目录不能删除。Common目录下是独立与demo的通用代码,大部分已经弃用。
(2)重新把它添加回去。

(3)添加后如下。
(4)重新编译。
4、添加串口打印功能
4.1、去掉无关代码
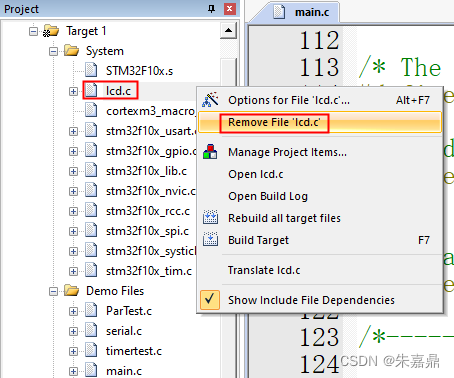
(1)去掉LCD代码。
(2)Demo Files文件下只保留“serial.c和main.c”文件,其他都删掉。


(3)编译
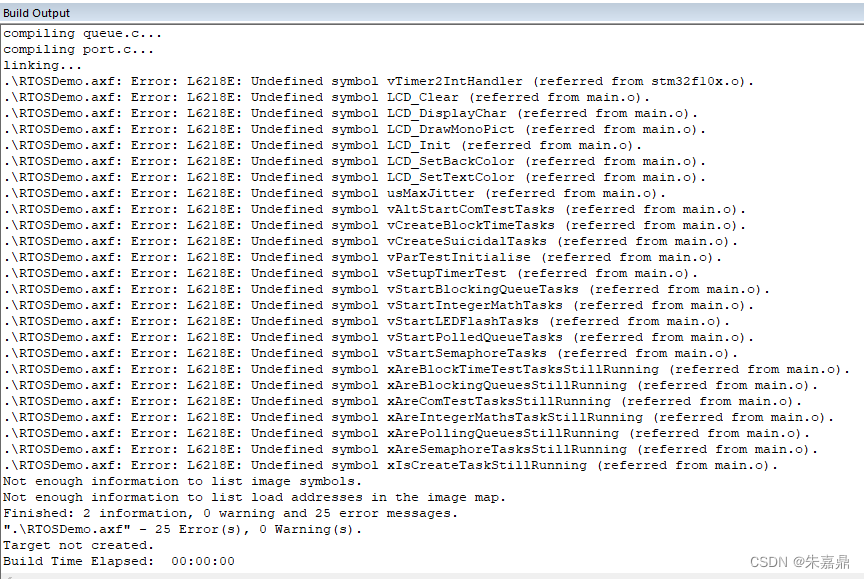 4.2、删除未定义报错内容
4.2、删除未定义报错内容
(1)在文件STM32F10x.s中,删除如下内容。
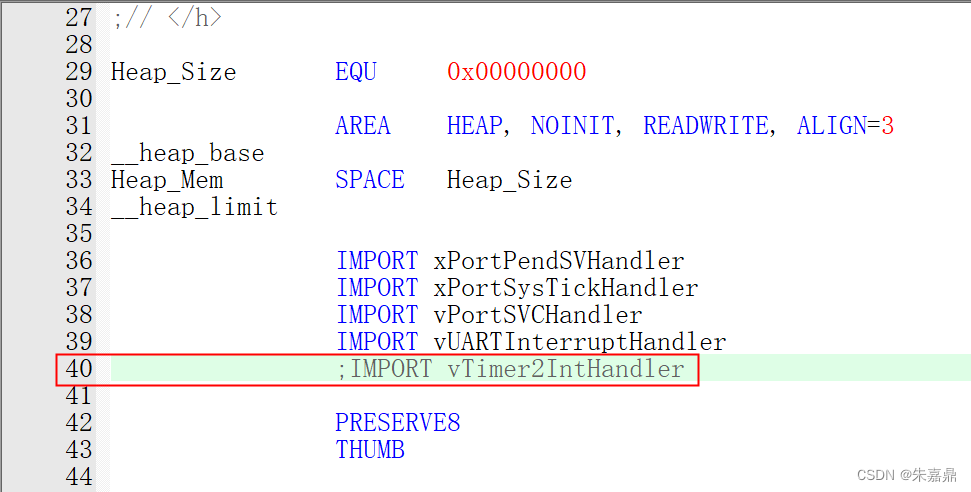

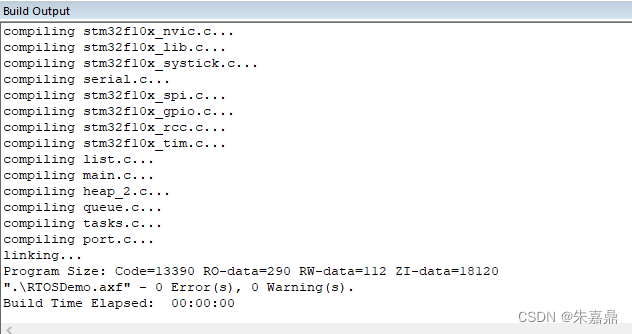
(2)删除其他未定义的相关内容,再次编译。
(3)报错的内容均删除或者注释,直到没错为止。
4.2、增加串口打印功能。
4.2.1、初始化串口。
(1)修改serial.c文件中的xSerialPortInitMinimal函数,删除其余用不到的内容。
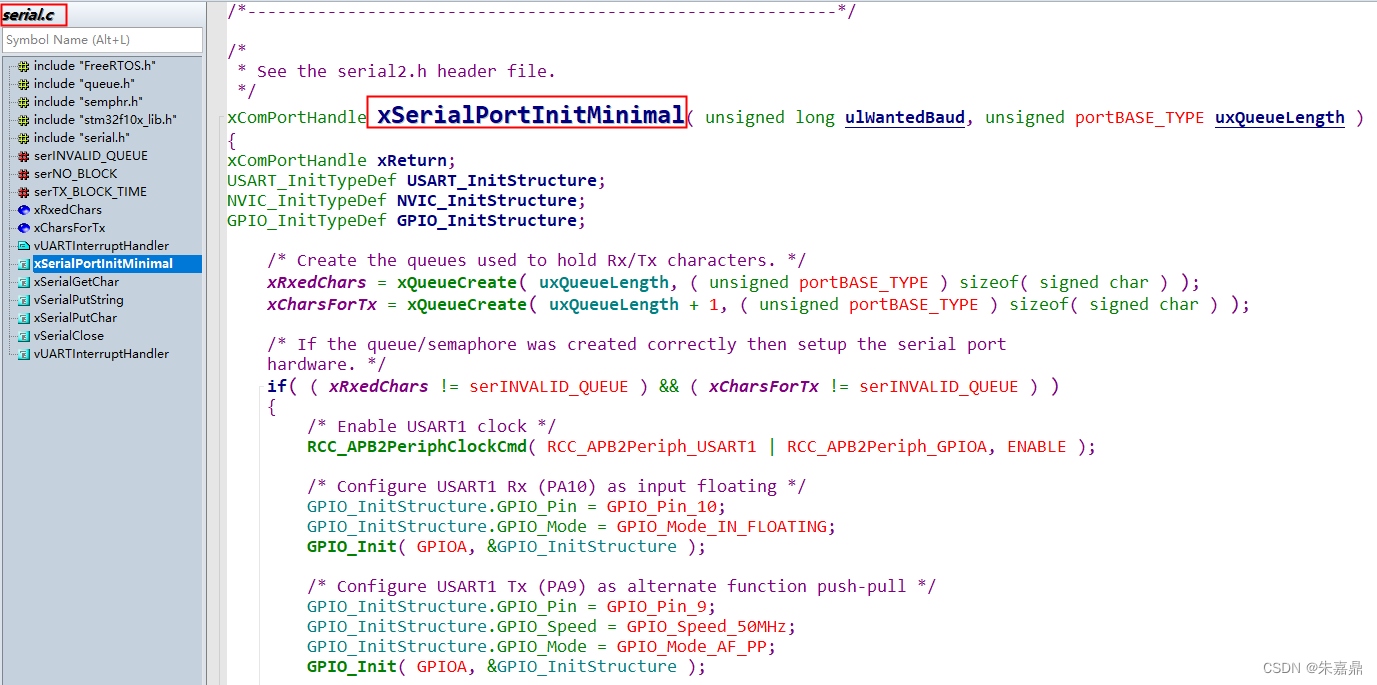
(2)修改后serial.c文件。
/** FreeRTOS V202212.01* Copyright (C) 2020 Amazon.com, Inc. or its affiliates. All Rights Reserved.** Permission is hereby granted, free of charge, to any person obtaining a copy of* this software and associated documentation files (the "Software"), to deal in* the Software without restriction, including without limitation the rights to* use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of* the Software, and to permit persons to whom the Software is furnished to do so,* subject to the following conditions:** The above copyright notice and this permission notice shall be included in all* copies or substantial portions of the Software.** THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS* FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR* COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER* IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.** https://www.FreeRTOS.org* https://github.com/FreeRTOS**//*BASIC INTERRUPT DRIVEN SERIAL PORT DRIVER FOR UART0.
*//* Scheduler includes. */
#include "FreeRTOS.h"
#include "queue.h"
#include "semphr.h"/* Library includes. */
#include "stm32f10x_lib.h"/* Demo application includes. */
#include "serial.h"
/*-----------------------------------------------------------*//** See the serial2.h header file.* 功能:串口初始化* 注:* 波特率:115200*/
void SerialPortInit(void)
{USART_InitTypeDef USART_InitStructure;GPIO_InitTypeDef GPIO_InitStructure;/* Enable USART1 clock */RCC_APB2PeriphClockCmd( RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE );/* Configure USART1 Rx (PA10) as input floating */GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init( GPIOA, &GPIO_InitStructure );/* Configure USART1 Tx (PA9) as alternate function push-pull */GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Init( GPIOA, &GPIO_InitStructure );USART_InitStructure.USART_BaudRate = 115200;USART_InitStructure.USART_WordLength = USART_WordLength_8b;USART_InitStructure.USART_StopBits = USART_StopBits_1;USART_InitStructure.USART_Parity = USART_Parity_No ;USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;USART_InitStructure.USART_Clock = USART_Clock_Disable;USART_InitStructure.USART_CPOL = USART_CPOL_Low;USART_InitStructure.USART_CPHA = USART_CPHA_2Edge;USART_InitStructure.USART_LastBit = USART_LastBit_Disable;USART_Init( USART1, &USART_InitStructure );USART_ITConfig( USART1, USART_IT_RXNE, ENABLE );USART_Cmd( USART1, ENABLE );
}
/*-----------------------------------------------------------*/(3)修改后serial.h文件。
/** FreeRTOS V202212.01* Copyright (C) 2020 Amazon.com, Inc. or its affiliates. All Rights Reserved.** Permission is hereby granted, free of charge, to any person obtaining a copy of* this software and associated documentation files (the "Software"), to deal in* the Software without restriction, including without limitation the rights to* use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of* the Software, and to permit persons to whom the Software is furnished to do so,* subject to the following conditions:** The above copyright notice and this permission notice shall be included in all* copies or substantial portions of the Software.** THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS* FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR* COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER* IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.** https://www.FreeRTOS.org* https://github.com/FreeRTOS**/#ifndef SERIAL_COMMS_H
#define SERIAL_COMMS_Htypedef void * xComPortHandle;typedef enum
{serCOM1,serCOM2,serCOM3,serCOM4,serCOM5,serCOM6,serCOM7,serCOM8
} eCOMPort;typedef enum
{serNO_PARITY,serODD_PARITY,serEVEN_PARITY,serMARK_PARITY,serSPACE_PARITY
} eParity;typedef enum
{serSTOP_1,serSTOP_2
} eStopBits;typedef enum
{serBITS_5,serBITS_6,serBITS_7,serBITS_8
} eDataBits;typedef enum
{ser50,ser75,ser110,ser134,ser150,ser200,ser300,ser600,ser1200,ser1800,ser2400,ser4800,ser9600,ser19200,ser38400,ser57600,ser115200
} eBaud;void SerialPortInit(void); #endif /* ifndef SERIAL_COMMS_H */
(4)修改后编译。报未定义vUARTInterruptHandler。
- 找到vUARTInterruptHandler,注释掉相关内容。
- 在STM32F10x.s文件中
- DCD 0;vUARTInterruptHandler ; USART1
- ;IMPORT vUARTInterruptHandler
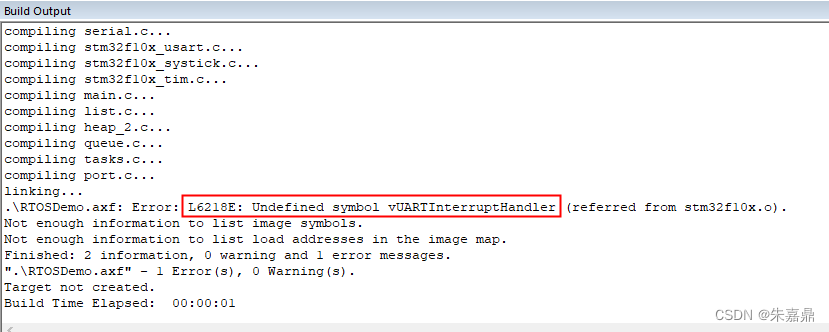
(5)修改后编译。

4.2.2、实现fputc。
(1)fputc函数移动到serial.c文件中。
int fputc( int ch, FILE *f )
{USART_TypeDef *USARTx = USART1;while( (USARTx->SR & (1<<7)) == 0); // 等待上次的数据发送完成USARTx->DR = ch;return ch;
}(2)串口初始化函数SerialPortInit在函数prvSetupHardware中调用;prvSetupHardware函数在main中调用。
(3)在main.c使用printf打印"Hello World.\r\n"
5、实验现象和程序下载
5.1、使用Keil模拟器查看实验现象

5.2、修改后完整工程下载地址
(1)完整工程存储在码云。
(2)FreeRTOS_CSDN: 用来保存FreeRTOS学习使用中用到的程序

相关文章:
三、从官方源码精简出第1个FreeRTOS
1、官方源码下载 (1)进入FreeRTOS官网:FreeRTOS官网 (2)点击下载FreeRTOS。 (3)选择待示例的项目进行下载。 2、删减目录 (1)下载后解压的FreeRTOS文件如下图所示。 (2)删除下图中红框勾选的文件。 (3)删除"FreeRTOSv202212.01\FreeRTOS\Demo"目录下用…...

__call__函数的用法
__call__的用法 在 Python 中,类可以通过定义特殊方法 call 来使其实例对象可调用,就像调用普通的函数一样。当你在实例对象后面加上括号并传递参数时,Python 会自动调用这个对象的 call 方法。这使得你可以将类的实例对象当作函数来使用。 下…...

golang定时任务库cron实践
简介 cron一个用于管理定时任务的库,用 Go 实现 Linux 中crontab这个命令的效果。之前我们也介绍过一个类似的 Go 库——gron。gron代码小巧,用于学习是比较好的。但是它功能相对简单些,并且已经不维护了。如果有定时任务需求,还…...

Julia 流程控制
流程控制语句通过程序设定一个或多个条件语句来实现。在条件为 true 时执行指定程序代码,在条件为 false 时执行其他指定代码。 Julia 提供了大量的流程控制语句: 复合表达式:begin 和 ;。 条件表达式:if-elseif-else 和 ?: (三…...
问题解决方案
前端开发 1、npm安装的时候老是卡住 reify:rxjs: timing reifyNode:node_modules/vue/cli/node_modules 查看当前使用的那个镜像 nrm lsnpm ---------- https://registry.npmjs.org/yarn --------- https://registry.yarnpkg.com/cnpm --------- https://r.cnpmjs.org/taobao …...
kubernetes基于helm部署gitlab-operator
kubernetes基于helm部署gitlab-operator 这篇博文介绍如何在 Kubernetes 中使用helm部署 GitLab-operator。 先决条件 已运行的 Kubernetes 集群负载均衡器,为ingress-nginx控制器提供EXTERNAL-IP,本示例使用metallb默认存储类,为gitlab p…...

ChatGPT在在线客服和呼叫中心中的应用如何?
ChatGPT在在线客服和呼叫中心领域中有广泛的应用潜力,可以帮助企业提供更高效、个性化和满意度更高的客户服务体验。以下是详细的讨论: **1. 自动化客服:** ChatGPT可以用于自动化客服流程,通过自动回复用户的常见问题和查询&…...
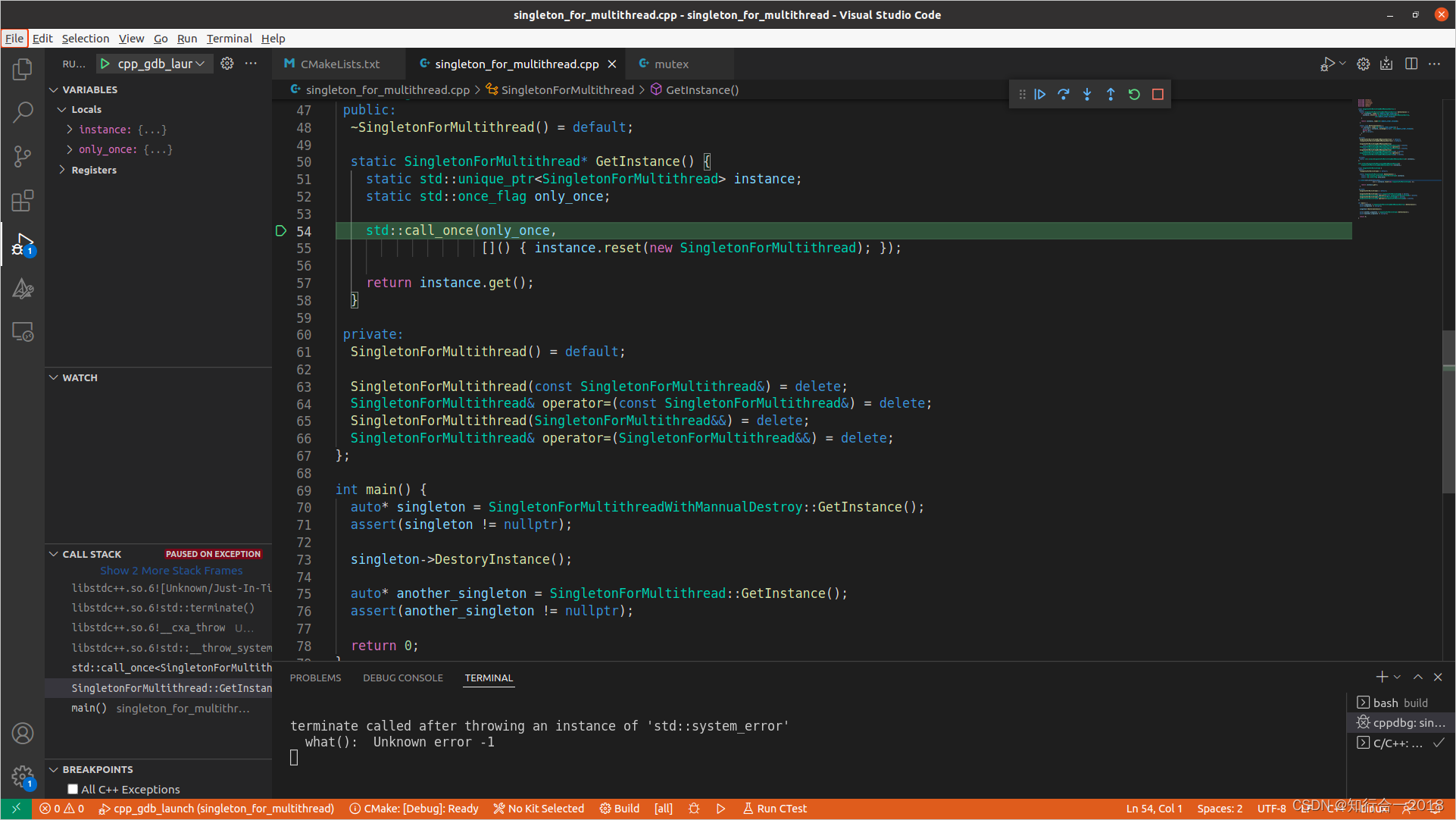
C++多线程环境下的单例类对象创建
使用C无锁编程实现多线程下的单例模式 贺志国 2023.8.1 在多线程环境下创建一个类的单例对象,要比单线程环境下要复杂很多。下面介绍在多线程环境下实现单例模式的几种方法。 一、尺寸较小的类单例对象创建 如果待创建的单例类SingletonForMultithread内包含的成…...

“深入解析JVM内部机制:从字节码到垃圾回收“
标题:深入解析JVM内部机制:从字节码到垃圾回收 摘要:本文将从字节码生成、类加载、运行时数据区域和垃圾回收等方面深入解析JVM的内部机制,并通过示例代码展示其工作原理和实践应用。 正文: 一、字节码生成 JVM是基…...

音频系统项目与音频算法研究方向分类
+我V hezkz17进数字音频系统研究开发交流答疑群(课题组) 音频系统项目与音频算法研究方向分类 一 音频系统项目产品分类 1 收音机,数字收音机,复读机 2 耳机,蓝牙耳机,TWS蓝牙耳机, 3 立体声音箱,AI智能音箱, 4 音频功放,车载功放, 5 音响,普通音响,Soundbar音响…...
单例模式和工厂模式
目录 今日良言:关关难过关关过,步步难行步步行 一、单例模式 1.饿汉模式 2.懒汉模式 二、工厂模式 今日良言:关关难过关关过,步步难行步步行 一、单例模式 首先来解释一下,什么是单例模式。 单例模式也就是单个…...
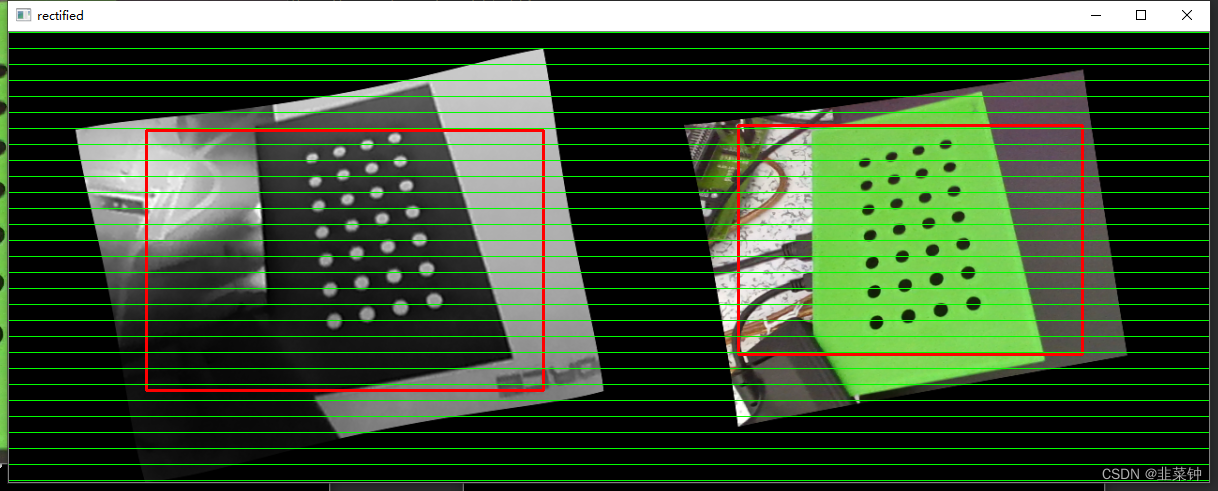
两个镜头、视野、分辨率不同的相机(rgb、红外)的视野校正
文章目录 背景实际效果查找资料资料1资料2 解决方案最终结果 背景 目前在做的项目用到两个摄像头,一个是热成像摄像头、另一个是普通的rgb摄像头。 一开始的目标是让他们像素级重合,使得点击rgb图像时,即可知道其像素对应的温度。但是在尝试…...
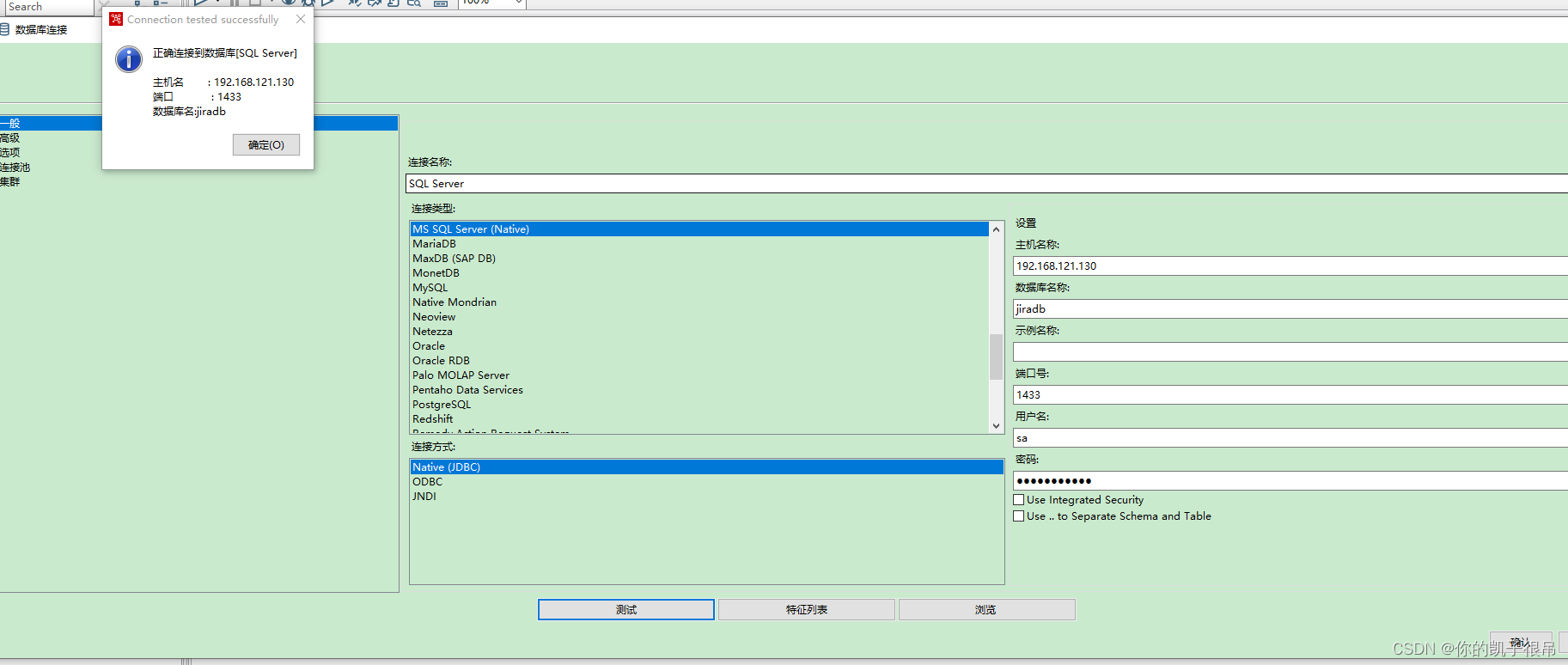
kettle 连接jdbc
DM JDBC连接 oracle JDBC连接 PG JDBC连接 SQLSERVER JDBC连接...
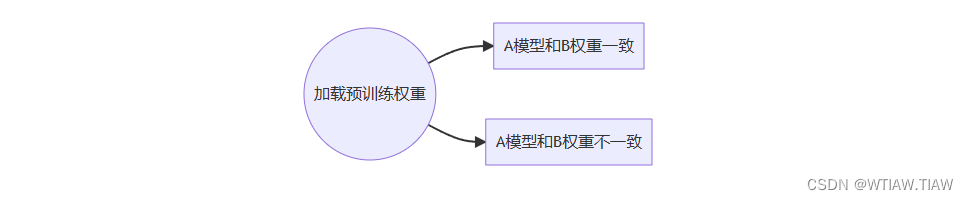
PyTorch中加载模型权重 A匹配B|A不匹配B
在做深度学习项目时,从头训练一个模型是需要大量时间和算力的,我们通常采用加载预训练权重的方法,而我们往往面临以下几种情况: 未修改网络,A与B一致 很简单,直接.load_state_dict() net ANet(num_cla…...

@FeignClient指定多个url实现负载均衡
C知道回答的如下: 在使用 FeignClient 调用多个 URL 实现负载均衡时,可以使用 Spring Cloud Ribbon 提供的功能来实现。下面是一个示例代码: 首先,在Spring Boot主类上添加EnableFeignClients注解启用Feign Client功能。 Spring…...
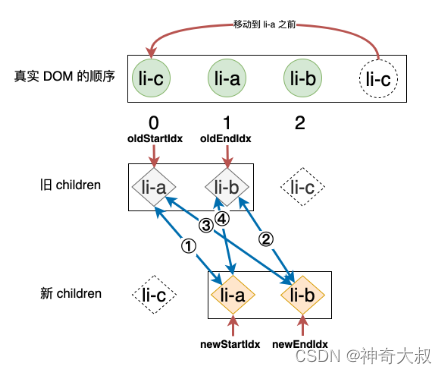
vue diff 双端比较算法
文章目录 双端指针比较策略命中策略四命中策略二命中策略三命中策略一未命中四种策略,遍历旧节点列表新增情况一新增情况二 删除节点双端比较的优势 双端指针 使用四个变量 oldStartIdx、oldEndIdx、newStartIdx 以及 newEndIdx 分别存储旧 children 和新 children …...
)
初识React: 基础(概念 特点 高效原因 虚拟DOM JSX语法 组件)
1.什么是React? React是一个由Facebook开源的JavaScript库,它主要用于构建用户界面。React的特点是使用组件化的思想来构建界面,使得代码的可复用性和可维护性大大提高。React还引入了虚拟DOM的概念,减少了对真实DOM的直接操作,…...
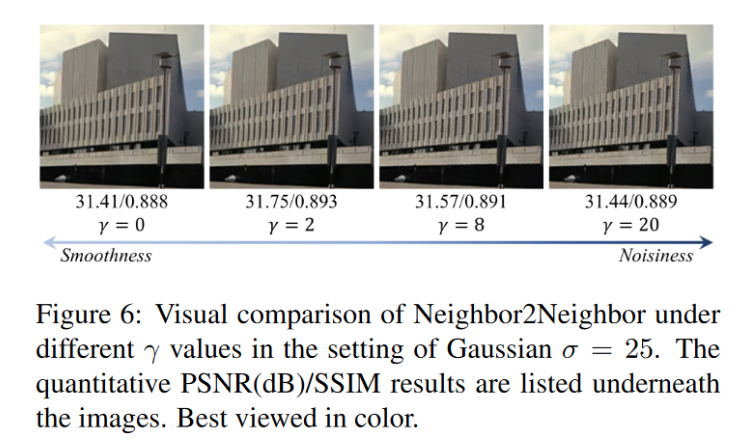
自监督去噪:Neighbor2Neighbor原理分析与总结
文章目录 1. 方法原理1.1 先前方法总结1.2 Noise2Noise回顾1.3 从Noise2Noise到Neighbor2Neighbor1.4 框架结构2. 实验结果3. 总结 文章链接:https://arxiv.org/abs/2101.02824 参考博客:https://arxiv.org/abs/2101.02824 1. 方法原理 1.1 先前方法总…...
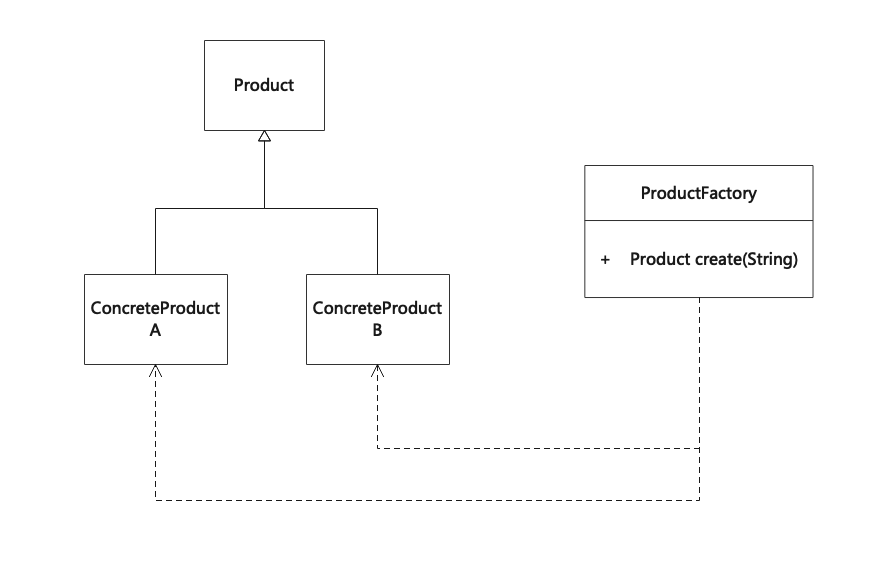
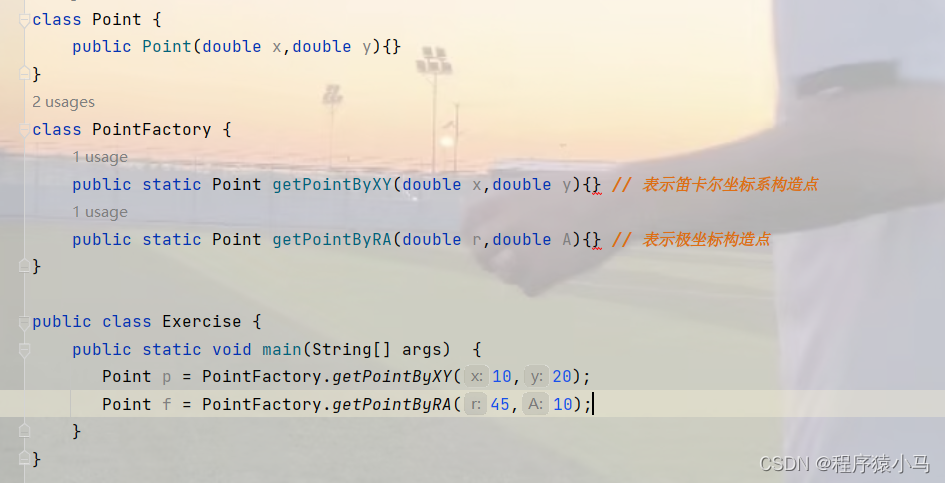
简单工厂模式(Simple Factory)
简单工厂模式,又称为静态工厂方法(Static Factory Method)模式。在简单工厂模式中,可以根据参数的不同返回不同类的实例。简单工厂模式专门定义一个类来负责创建其他类的实例,被创建的实例通常都具有共同的父类。简单工厂模式不属于GoF的23个…...

Agent:OpenAI的下一步,亚马逊云科技站在第5层
什么是Agent?在大模型语境下,可以理解成能自主理解、规划、执行复杂任务的系统。Agent也将成为新的起点,成为各行各业构建新一代AI应用必不可少的组成部分。 对此,初创公司Seednapse AI创始人提出构建AI应用的五层基石理论&#…...

Matlab阶跃响应性能指标自动化计算:从原理到工程实践
1. 项目概述:从阶跃响应曲线到量化性能的灵魂拷问在控制系统、信号处理乃至电路设计的日常工作中,我们常常会面对一个看似简单却至关重要的任务:给一个系统施加一个“阶跃”输入,然后观察它的输出如何从静止状态“爬升”到新的稳态…...

Seed-VC语音克隆指南:5分钟实现零样本实时语音转换的终极方案
Seed-VC语音克隆指南:5分钟实现零样本实时语音转换的终极方案 【免费下载链接】seed-vc zero-shot voice conversion & singing voice conversion, with real-time support 项目地址: https://gitcode.com/GitHub_Trending/se/seed-vc 你是否曾想过&…...

Go语言事件驱动:CloudEvents
Go语言事件驱动:CloudEvents 1. CloudEvents实现 type Event struct {SpecVersion stringType stringSource stringID stringData []byte }2. 总结 CloudEvents是云原生事件的标准格式,促进跨服务的事件交互。...

【Java杂项】为什么 b += 1 可以,但 b = b + 1 会报错?类型提升与复合赋值详解
【Java杂项】为什么 b 1 可以,但 b b 1 会报错?复合赋值与类型提升讲清楚前言一、先给结论:它不是简单的文本替换二、先看认知冲突2.1 普通赋值为什么报错2.2 复合赋值为什么能通过三、类型提升到底是什么3.1 常见类型提升结果3.2 为什么小…...
)
深入理解STM32的PWM:从CubeMX配置到用HAL库精准控制舵机角度(以F103为例)
深入理解STM32的PWM:从CubeMX配置到用HAL库精准控制舵机角度(以F103为例) 在机器人控制、自动化设备等需要精确位置反馈的应用场景中,舵机的精准控制往往是项目成败的关键。许多开发者虽然能够通过PWM实现基本的0、90、180三档控制…...
)
别再只会写脚本了!用MATLAB面向对象编程重构你的数据处理流程(附完整Point2D类示例)
从脚本到对象:MATLAB面向对象编程的工程化实践 在科研与工程计算领域,MATLAB长期占据着不可替代的地位。然而,许多用户在使用多年后,依然停留在编写线性脚本的阶段,导致代码库逐渐演变成难以维护的"意大利面条式代…...
【量化】IPTQ-ViT: Post-Training Quantization of Non-linear Functions for Integer-only Vision Transformer
【PTQ】PTQViT/IPTQ-ViT (arXiv 2022) 问题: ViT 中的非线性函数(GELU、Softmax)在纯整数推理中存在计算障碍。 核心创新: 模块方法作用多项式近似 GELU用低阶多项式逼近 GELU将非线性运算转化为整数可执行的乘加Bit-shifting Softmax用位移操作近似 …...

巧用Charles代理,根治Xposed资源库HTTPS迁移引发的下载难题
1. 当Xposed遇上HTTPS:一场协议升级引发的"断粮危机" 去年给家里老人用的那台小米4刷机时,突然发现Xposed框架死活下载不了资源包。屏幕上赫然显示着那个熟悉的错误提示:"Xposed Installer:下载http://dl.xposed.info/repo/fu…...

告别阿里云物联网平台:用免费公共MQTT服务器玩转ESP32远程监控
告别商业云平台:用免费公共MQTT服务器实现ESP32远程监控 在物联网项目开发中,远程数据传输是核心需求之一。许多开发者习惯性选择阿里云、腾讯云等商业物联网平台,却常常被复杂的配置流程、高昂的服务费用所困扰。实际上,对于个人…...
)
Spring AI 快速对接 AI 大模型(开箱即用)
一、项目准备(最简依赖)1. 创建 Spring Boot 项目推荐版本:Spring Boot 3.2.x JDK 版本:172. pom.xml 核心依赖<?xml version"1.0" encoding"UTF-8"?> <project xmlns"http://maven.apache.o…...