在Raspberry Pi 4上安装Ubuntu 20.04 + ROS noetic(不带显示器)
在Raspberry Pi 4上安装Ubuntu 20.04 + ROS noetic(不带显示器)
1. 所需设备
所需设备:
-
树莓派 4 B 型
-
wifi
-
microSD 卡:最小 32GB
-
MicroSD 转 SD 适配器
-
(可选)显示器,鼠标等
2. 树莓派镜像烧录器
如果没有显示器,那么需要使用树莓派镜像烧录器,官网下载即可。

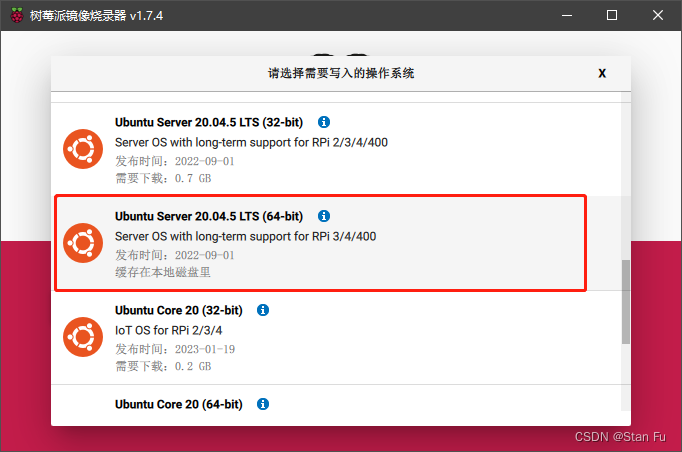
首先选择操作系统,接下来找到 Ubuntu Server 20.04.5版本。
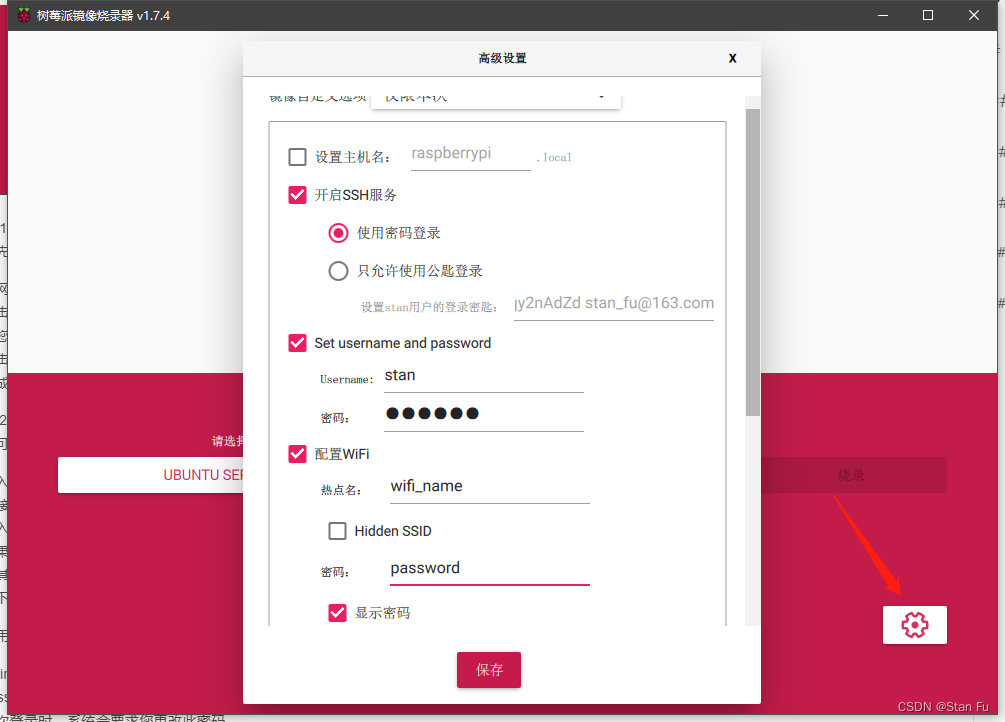
接下来配置一下系统的初始化选项:
- “开启SSH服务”以启用 SSH
- “设置用户名”
- “配置wifi”(重要):这将启用 Wi-Fi 并自动连接到提供的网络+密码。当然,这个 Wi-Fi 网络应该与当前电脑连接的网络相同,否则本教程的其余部分将不起作用。
接下来烧录等待即可。
3. 寻找Raspberry Pi 4 的ip地址
从计算机中弹出并取出 SD 卡。确保 Raspberry Pi 已关闭电源(拔掉电源线),将 micro SD 卡放入相应的插槽中,然后再打开 Raspberry Pi 4 的电源。应该看到 Pi 上的绿色 LED 随机闪烁。这意味着 Pi 正在启动并使用 SD 卡工作。如果绿色 LED 没有随机闪烁,可能是因为烧录操作不成功,需要重新烧录。
Pi 4 将尝试使用提供的名称和密码连接到目前的 Wi-Fi 网络。
下一步是查找Raspberry Pi在网络内的 IP 地址是什么。
Notice:如果以下步骤一开始没有看到 Pi 地址,则等待至少 2 分钟后再次关闭/打开树莓派的电源。
3.1 Windows
Windows可以使用Advanced IP Scanner 。
所要做的就是单击“扫描”并等待。
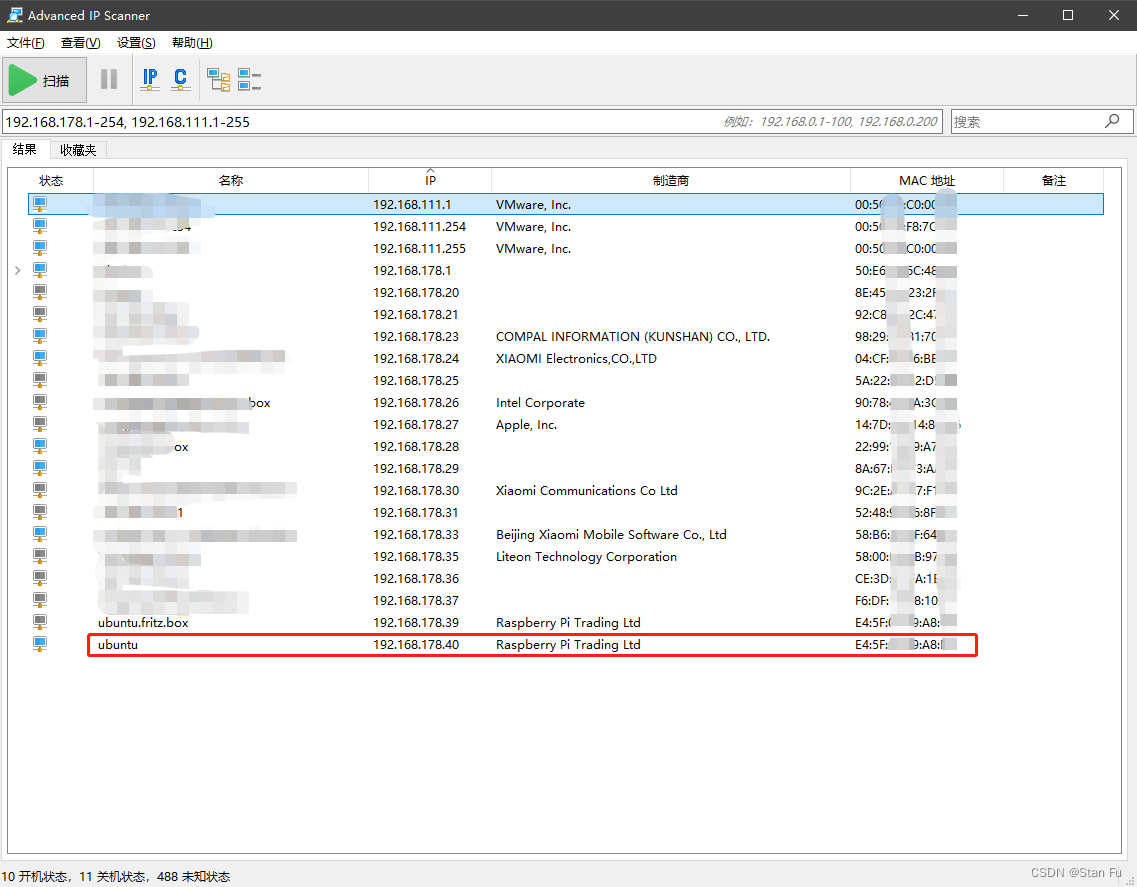
可以看到我的Raspberry Pi的地址是192.168.178.40.
3.2 Linux/Ubuntu
通常使用nmap来实现这一点(需要先安装nmap:sudo apt install nmap)。
首先找到网络IP地址和子网掩码。运行ifconfig命令:
$ ifconfig
enp0s3: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500inet 192.168.43.138 netmask 255.255.255.0 broadcast 192.168.43.255inet6 fe80::4024:2554:eea4:f97b prefixlen 64 scopeid 0x20<link>ether 08:00:27:28:65:38 txqueuelen 1000 (Ethernet)RX packets 36560 bytes 42335654 (42.3 MB)RX errors 0 dropped 0 overruns 0 frame 0TX packets 8763 bytes 671459 (671.4 KB)TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
lo: flags=73<UP,LOOPBACK,RUNNING> mtu 65536inet 127.0.0.1 netmask 255.0.0.0inet6 ::1 prefixlen 128 scopeid 0x10<host>loop txqueuelen 1000 (Local Loopback)RX packets 947 bytes 82515 (82.5 KB)RX errors 0 dropped 0 overruns 0 frame 0TX packets 947 bytes 82515 (82.5 KB)TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
在这个例子中,我的Ubuntu主机的IP地址是192.168.43.138,子网掩码是255.255.255.0(24位)。
现在,使用nmap和刚刚获取的数据:
$ sudo nmap -sP 192.168.43.0/24
Starting Nmap 7.80 ( https://nmap.org ) at 2023-04-26 13:50 CEST
Nmap scan report for _gateway (192.168.43.1)
Host is up (0.015s latency).
MAC Address: 8E:F5:A3:DB:03:27 (Unknown)
Nmap scan report for ubuntu (192.168.43.56)
Host is up (0.049s latency).
MAC Address: DC:A6:32:02:46:50 (Raspberry Pi Trading)
Nmap scan report for LAPTOP-27UBLNO7 (192.168.43.234)
Host is up (0.00057s latency).
MAC Address: 7C:B2:7D:9E:95:DA (Intel Corporate)
Nmap scan report for ed-vm (192.168.43.138)
Host is up.
Nmap done: 256 IP addresses (4 hosts up) scanned in 2.07 seconds
然后我们找到了树莓派的IP地址:192.168.43.56。
3.3 有屏幕
直接输入
$ ip addr
输出类似于:
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00inet 127.0.0.1/8 scope host lovalid_lft forever preferred_lft foreverinet6 ::1/128 scope host valid_lft forever preferred_lft forever
2: eth0: <NO-CARRIER,BROADCAST,MULTICAST,UP> mtu 1500 qdisc mq state DOWN group default qlen 1000link/ether e4:5f:01:49:a8:b6 brd ff:ff:ff:ff:ff:ff
3: wlan0: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc fq_codel state UP group default qlen 1000link/ether e4:5f:01:49:a8:b7 brd ff:ff:ff:ff:ff:ffinet 192.168.178.40/24 brd 192.168.178.255 scope global dynamic wlan0valid_lft 863983sec preferred_lft 863983sec
4. 连接到树莓派
在Windows上打开终端,只需在Windows搜索栏中键入“cmd”,然后启动“命令提示符”。 我在这里使用了vscode,因为非常适合未来的开发,在这里非常推荐。
键入以下命令:
$ ssh pi@192.168.178.40
将“pi”替换为树莓派镜像烧录器的高级设置中输入的任何其他用户名。同时,使用上一步中刚刚找到的IP地址,而不是192.168.178.40。
然后将看到类似于以下内容:
The authenticity of host '192.168.178.40 (192.168.178.40)' can't be established.
ED25519 key fingerprint is SHA256:WI67l/jru1i2vEnrHWLbzoV+1s71Dt0AJtg6JBP8faI.
This key is not known by any other names
Are you sure you want to continue connecting (yes/no/[fingerprint])? yes
Warning: Permanently added '192.168.178.40' (ED25519) to the list of known hosts.
pi@192.168.178.40's password:
需要在第一个问题中输入“yes”,然后使用烧录器的高级设置中设置的密码。
然后将看到类似于以下内容:
Welcome to Ubuntu 20.04.6 LTS (GNU/Linux 5.4.0-1090-raspi aarch64)* Documentation: https://help.ubuntu.com* Management: https://landscape.canonical.com* Support: https://ubuntu.com/advantageSystem information as of Sun Aug 6 10:11:16 UTC 2023System load: 0.47 Temperature: 55.0 C Usage of /: 31.3% of 28.94GB Processes: 168 Memory usage: 4% Users logged in: 0 Swap usage: 0% IPv4 address for wlan0: 192.168.178.40 * Strictly confined Kubernetes makes edge and IoT secure. Learn how MicroK8sjust raised the bar for easy, resilient and secure K8s cluster deployment.https://ubuntu.com/engage/secure-kubernetes-at-the-edgeExpanded Security Maintenance for Applications is not enabled.183 updates can be applied immediately.
To see these additional updates run: apt list --upgradable29 additional security updates can be applied with ESM Apps.
Learn more about enabling ESM Apps service at https://ubuntu.com/esmNew release '22.04.2 LTS' available.
Run 'do-release-upgrade' to upgrade to it.Last login: Thu Jul 20 12:13:32 2023 from 192.168.163.155
pi@ubuntu:~$
5. 安装ROS noetic
设置sources.list
将计算机设置为接受packages.ros.org的软件。
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
这行命令将ROS软件包源添加到sources.list文件中。
sudo apt install curl # if you haven't already installed curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
这两行命令用于安装curl(如果还没有安装curl)并导入ROS软件包的公共密钥。
sudo apt update
这行命令用于更新可用的软件包列表。
安装桌面版
ROS-Base中的所有内容以及rqt和rviz等工具。
sudo apt install ros-noetic-desktop
这行命令用于安装ROS桌面版,它包括ROS-Base中的所有内容以及一些工具(如rqt和rviz)。
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
这两行命令用于将ROS环境变量添加到bashrc文件中,并在当前会话中立即加载这些变量。
安装python3-rosdep,python3-rosinstall,python3-rosinstall-generator,python3-wstool和build-essential等软件包。
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
这行命令用于安装一些常用的ROS依赖工具和编译所需的基本软件包。
初始化rosdep
在使用许多ROS工具之前,需要初始化rosdep。rosdep可以为要编译的源代码轻松安装系统依赖项,并且某些ROS核心组件需要它来运行。如果还没有安装rosdep,请按照以下方式安装。
sudo apt install python3-rosdep
这行命令用于安装rosdep。
执行以下命令来初始化rosdep。
sudo rosdep init
rosdep update
这两行命令用于初始化rosdep,并获取最新的rosdep规则。
测试
接下来可以运行roscore来检查ros的安装。
roscore
相关文章:
在Raspberry Pi 4上安装Ubuntu 20.04 + ROS noetic(不带显示器)
在Raspberry Pi 4上安装Ubuntu 20.04 ROS noetic(不带显示器) 1. 所需设备 所需设备: 树莓派 4 B 型 wifi microSD 卡:最小 32GB MicroSD 转 SD 适配器 (可选)显示器,鼠标等 2. 树莓派…...
CommStudio for .NET Crack
CommStudio for .NET Crack CommStudio for.NET使您的应用程序可以轻松地使用串行端口和调制解调器进行通信。CommStudio for.NET是一套全面的组件和可视化调试工具,可将远程系统和设备与visual Studio 2005和visual Studio 2008集成。开发与遗留系统和外部设备集成…...
!!!)
蓝桥杯上岸考点清单 (冲刺版)!!!
大家好 我是寸铁💪 真题千千万万遍,蓝桥省一自然现! ✌️ 日更3000里,蓝桥眷顾你 🌟 暴力出奇迹,打表过样例 👊 冲刺蓝桥杯省一模板大全来啦 🔥 蓝桥杯4月8号就要开始了 &#…...
AI一键生成短视频
AI一键生成推文短视频 阅读时长:10分钟 本文内容: 结合开源AI,一键生成短视频发布到常见的某音,某手平台,狠狠赚一笔 前置知识: 1.基本的 python 编程知识 2.chatGPT 使用过 3.stable diffution 使用过 成果…...
)
基于MATLAB长时间序列遥感数据分析(以MODIS数据处理为例)
MATLAB MATLAB是美国MathWorks公司出品的商业数学软件,用于数据分析、无线通信、深度学习、图像处理与计算机视觉、信号处理、量化金融与风险管理、机器人,控制系统等领域。 [1] MATLAB是matrix&laboratory两个词的组合,意为矩阵工厂&a…...

postgresql之内存池-AllocsetContext
一、简介 postgresql大部分的内存分配管理都是通过MemoryContext进行操作的, 多个相关的MemoryContext构成了一个树型结构, 多个树构成了一个森林。 实现了三种MemoryContext: SlabContextGenerationContextAllocSetContext 使用全局变量CurrentMemo…...

QT 使用单例模式
目录 1. 单例模式介绍 2.单例模式实现 1. 单例模式介绍 有些时候我们在做 qt 项目的时候,要用到很多类. 例如我们用到的类有 A,B,C,D. 其中,A 是 B,C,D 中都需要用到的类,A 类非常的抢手. 但是,A 类非常的占内存,定义一个 A 对象需要 500M 内存,假如在 B,C,D 中都定义一个 A 类…...

接口测试——postman接口测试(三)
目录 1. postman介绍与安装 2. postman发送get请求 3. postman发送post请求 1. postman介绍与安装 安装网址:Postman安装教程:留言找我要即可 2. postman发送get请求 import pymysql from flask import Flask,request# 这里是mysql的基本连接信息 c…...
react中hooks的理解与使用
一、作用 我们知道react组件有两种写法一种是类组件,另一种是函数组件。而函数组件是无状态组件,如果我们要想改变组件中的状态就无法实现了。为此,在react16.8版本后官方推出hooks,用于函数组件更改状态。 二、常用API 1、use…...
STM32的电动自行车信息采集上报系统(学习)
摘要 针对电动自行车实时监管不便的问题,设计了一种基于STM32的电动自行车信息采集系统,通过获取电池、位置和行驶状态信息并上报到服务器中,实现实时监管。 通过多路串口请求电池、行驶状态和位置信息,以并发方式进行数据接收、…...
蓝桥杯上岸每日N题 第七期(小猫爬山)!!!
蓝桥杯上岸每日N题 第七期(小猫爬山)!!! 同步收录 👇 蓝桥杯上岸必背!!!(第四期DFS) 大家好 我是寸铁💪 冲刺蓝桥杯省一模板大全来啦 🔥 蓝桥杯4月8号就要开始了 &a…...
【Linux系统编程】冯诺依曼体系结构
目录 前言 什么是冯诺依曼体系结构? 冯诺依曼体系结构如何进行数据处理的? 存储器在冯诺依曼体系中有什么作用? 冯诺依曼体系结构为什么要这样设计? 冯诺依曼结构总结 前言 相信对于冯诺依曼这个人的名字大家一定不会感到陌…...
数据结构--动态顺序表
文章目录 线性表动态顺序表数组与顺序表 接口实现初始化:尾插:尾删头插头删指定位置插入指定位置删除查找摧毁 完整代码 线性表 线性表是数据结构中最基本、最简单也是最常用的一种数据结构。线性表是指由n个具有相同数据类型的元素组成的有限序列。 线…...
笔试数据结构选填题
目录 卡特兰数Catalan:出栈序列/二叉树数 树 二叉树 N01N2 哈夫曼树(最优二叉树)Huffman 度m的哈夫曼树只有度为0和m的结点:Nm(n-1)/(m-1) 平衡二叉树AVL Nh表示深度为h最少结点数,则N00,N11&#…...

# 鸢尾花的案例学习
# 鸢尾花的案例学习 # 1. 导入小型的数据 from sklearn.datasets import load_iris import numpy as np import pandas as pd import seaborn as sbn import matplotlib.pyplot as plt # 2. 获取数据 irisload_iris() # 3.查看数据print("数据集\n ",len(iris.d…...

线程、进程的区别
线程、进程的区别 在开发中,我们经常听到线程和进程两个概念,它们都是操作系统的基本概念,操作系统以进程为基本单位分配存储器,以线程为基本单位分配CPU。虽然它们有很多相似之处,但是它们也有很大的区别。本文将详细…...

在 Ubuntu 上安装 Docker 桌面
Ubuntu 22.04 (LTS) 安装 Docker 桌面 要成功安装 Docker Desktop,您必须: 满足系统要求拥有 64 位版本的 Ubuntu Jammy Jellyfish 22.04 (LTS) 或 Ubuntu Impish Indri 21.10。对于非 Gnome 桌面环境,必须安装 gnome-terminal:…...
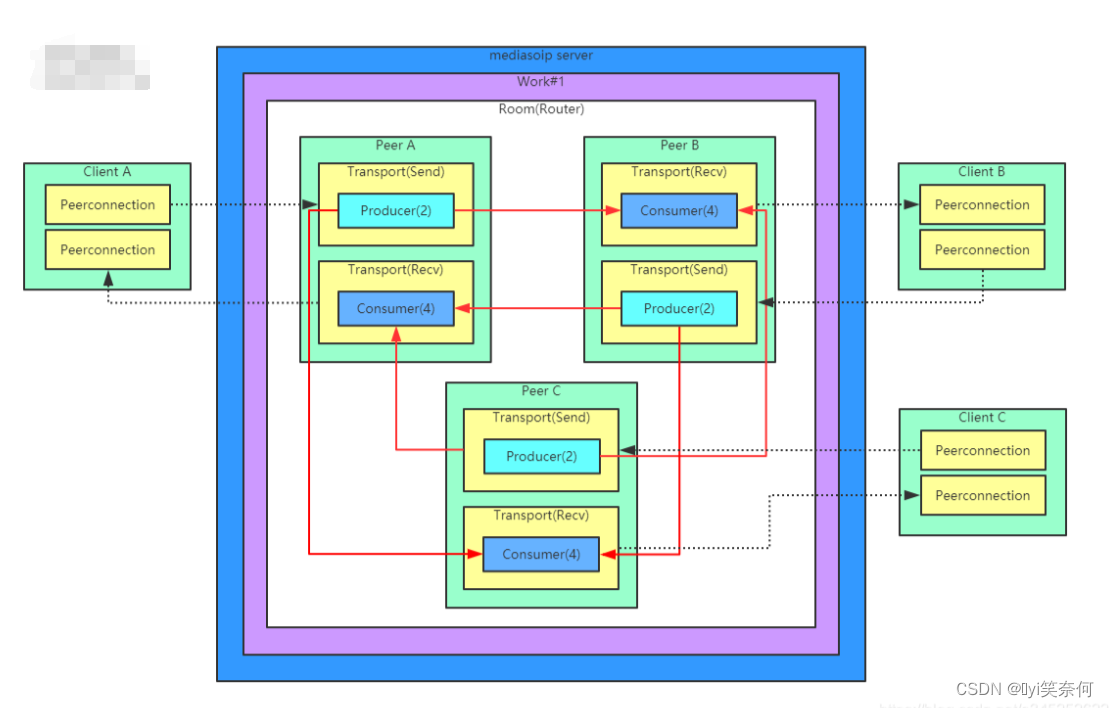
【WebRTC---序篇】(七)RTC多人连麦方案
服务端可以选择mediasoup,作为SFU服务器,只负责转发数据 下图举例三个Client (browser或者客户端)同时加入一个房间,每个app同时发布一路视频和一路音频,并且接受来自其他app的音视频流,mediasoup内部的结构如下&…...

【Java可执行命令】(十六)诊断命令请求发送工具 jcmd:提供一种简单而强大的方式来管理和监控 Java 进程 ~
Java可执行命令之jcmd 1️⃣ 概念2️⃣ 优势和缺点3️⃣ 使用3.1 语法格式3.2 jcmd -l:列出正在运行的 Java 进程3.3 jcmd < pid> help:列出特定进程的诊断命令列表3.4 jcmd < pid> < command>:执行诊断命令 4️⃣ 应用场景…...

如何创建无序列表和有序列表?
聚沙成塔每天进步一点点 ⭐ 专栏简介⭐ 无序列表⭐ 无序列表⭐ 注意事项⭐ 写在最后 ⭐ 专栏简介 前端入门之旅:探索Web开发的奇妙世界 记得点击上方或者右侧链接订阅本专栏哦 几何带你启航前端之旅 欢迎来到前端入门之旅!这个专栏是为那些对Web开发感兴…...

Golang怎么实现HTTP请求取消_Golang如何用context取消正在进行的HTTP请求【实战】
HTTP客户端默认不取消请求是设计选择,需显式通过context.Context传递取消信号;必须用NewRequestWithContext、禁用Client.Timeout、确保Transport组件响应同一ctx。为什么 http.Client 默认不取消请求?Go 的 http.Client 本身不自动响应外部中…...
基于CircuitPython与NeoPixel的桌面俄罗斯方块游戏机DIY全攻略
1. 项目概述与核心思路几年前,我在麻省理工学院(MIT)的校园里第一次看到那座著名的“绿楼”(Green Building)外墙上的巨型俄罗斯方块游戏时,就被深深震撼了。那不仅仅是一个游戏,更是一种将冰冷…...

基于本地大模型的字幕翻译:LM Studio集成方案与实战优化
1. 项目概述:当本地大模型遇上字幕翻译最近在折腾本地大模型应用时,发现了一个挺有意思的场景:字幕翻译。很多朋友喜欢看海外影视剧或学习资料,但苦于没有高质量的中文字幕。在线翻译工具要么有字数限制,要么担心隐私泄…...

AI助手开发实战:从资源索引到生产级系统搭建指南
1. 项目概述:一个为AI助手开发者准备的“藏宝图” 如果你正在开发一个AI助手应用,或者正打算将大语言模型的能力集成到你的产品里,那你大概率会遇到一个经典难题:面对市面上眼花缭乱的模型、API和工具,我到底该怎么选&…...

穿越机老鸟踩坑实录:MPU6000传感器在F4飞控上的IMU方向“玄学”配置
穿越机IMU方向配置实战:从MPU6000异常自旋到飞控底层校准 当你的穿越机在通电瞬间像被无形大手狠狠抽了一记耳光般疯狂自旋,而Betaflight地面站里陀螺仪数据却显示"一切正常"时,这往往意味着你正遭遇IMU方向配置的"量子纠缠态…...

YimMenu终极配置指南:从零开始掌握GTA V高级菜单工具
YimMenu终极配置指南:从零开始掌握GTA V高级菜单工具 【免费下载链接】YimMenu YimMenu, a GTA V menu protecting against a wide ranges of the public crashes and improving the overall experience. 项目地址: https://gitcode.com/GitHub_Trending/yi/YimMe…...

nnU-Net v2实战:从零开始配置环境与训练自定义医学影像数据集
1. 环境配置:搭建nnU-Net v2的基础舞台 第一次接触nnU-Net时,我踩过的最大坑就是环境配置。当时为了赶项目进度,直接用了现有的Python 3.8环境,结果在安装时各种报错,浪费了大半天时间。后来才发现,nnU-Net…...

紧急更新!Midjourney 6.2.1已悄然修复碳素印相的硫化银衰减模拟缺陷——但97%用户仍在用旧参数,立即校准你的工作流
更多请点击: https://intelliparadigm.com 第一章:碳素印相的视觉本质与Midjourney 6.2.1修复的底层动因 碳素印相的物质性光感逻辑 碳素印相并非数字渲染的模拟,而是一种基于明胶-碳黑颗粒物理沉积的连续调成像工艺。其高密度阴影区呈现哑…...

SVG与CSS变量驱动的自动化品牌视觉生成技术实践
1. 项目概述:一分钟品牌塑造的实践宝库在品牌营销和创意设计领域,一个常见的痛点是如何快速、高效地生成高质量的视觉品牌资产。无论是初创公司需要一个临时的Logo,还是内容创作者想为新的系列视频设计一个统一的片头,传统的品牌设…...
)
告别命令行恐惧:用Docker Compose一键部署EMQX集群(附Web控制台和端口映射配置)
告别命令行恐惧:用Docker Compose一键部署EMQX集群(附Web控制台和端口映射配置) 在物联网和分布式系统开发中,EMQX作为高性能的MQTT消息服务器,已经成为连接海量设备与后端服务的核心枢纽。然而,传统安装方…...