Linux线程调度实验
Linux线程调度实验
1.获取线程属性
#include <stdio.h>
#include <sys/types.h>
#include <unistd.h>
#include <pthread.h>
#include <time.h>
#include <stdlib.h>
#include <errno.h>
#define _GNU_SOURCE#define handle_error_en(en, msg) \do { errno = en; perror(msg); exit(EXIT_FAILURE); } while (0)static void display_pthread_attr(pthread_attr_t *attr, char *prefix){int s, i;size_t v;void *stkaddr;struct sched_param sp;s = pthread_attr_getdetachstate(attr, &i);if (s != 0) handle_error_en(s, "pthread_attr_getdetachstate");printf("%sDetach state = %s\n", prefix,(i == PTHREAD_CREATE_DETACHED) ? "PTHREAD_CREATE_DETACHED" :(i == PTHREAD_CREATE_JOINABLE) ? "PTHREAD_CREATE_JOINABLE" :"???");s = pthread_attr_getscope(attr, &i);if (s != 0)handle_error_en(s, "pthread_attr_getscope");printf("%sScope = %s\n", prefix,(i == PTHREAD_SCOPE_SYSTEM) ? "PTHREAD_SCOPE_SYSTEM" :(i == PTHREAD_SCOPE_PROCESS) ? "PTHREAD_SCOPE_PROCESS" :"???");s = pthread_attr_getinheritsched(attr, &i);if (s != 0)handle_error_en(s, "pthread_attr_getinheritsched");printf("%sInherit scheduler = %s\n", prefix,(i == PTHREAD_INHERIT_SCHED) ? "PTHREAD_INHERIT_SCHED" :(i == PTHREAD_EXPLICIT_SCHED) ? "PTHREAD_EXPLICIT_SCHED" :"???");s = pthread_attr_getschedpolicy(attr, &i); if (s != 0) handle_error_en(s, "pthread_attr_getschedpolicy"); printf("%sScheduling policy = %s\n", prefix, (i == SCHED_OTHER) ? "SCHED_OTHER" : (i == SCHED_FIFO) ? "SCHED_FIFO" : (i == SCHED_RR) ? "SCHED_RR" : "???"); s = pthread_attr_getschedparam(attr, &sp); if (s != 0) handle_error_en(s, "pthread_attr_getschedparam"); printf("%sScheduling priority = %d\n", prefix, sp.sched_priority); s = pthread_attr_getguardsize(attr, &v); if (s != 0) handle_error_en(s, "pthread_attr_getguardsize"); printf("%sGuard size = %zu bytes\n", prefix, v); s = pthread_attr_getstack(attr, &stkaddr, &v); if (s != 0) handle_error_en(s, "pthread_attr_getstack"); printf("%sStack address = %p\n", prefix, stkaddr); printf("%sStack size = 0x%zx bytes\n", prefix, v); }void* computing(void* arg){int s;pthread_attr_t gattr;s = pthread_getattr_np(pthread_self(), &gattr);if (s != 0)handle_error_en(s, "pthread_getattr_np");printf("Thread attributes:\n");display_pthread_attr(&gattr, "\t");pause();pthread_exit(0);}int main(){pthread_t tid;pthread_attr_t attr;pthread_attr_init(&attr);// 线程创建函数pthread_create(&tid, &attr, computing, NULL);// 等待指定的线程结束pthread_join(tid,NULL);return 0;
}这个库函数报错不用管
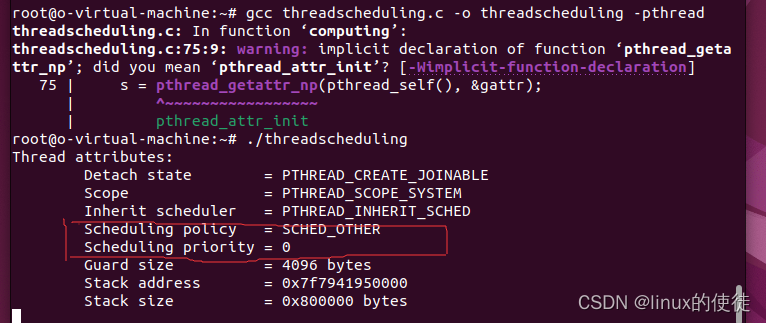 我们可以看到当前进程:
我们可以看到当前进程:
datach state:这个进程是一个joinable,也就是一个可进入等待状态的进程
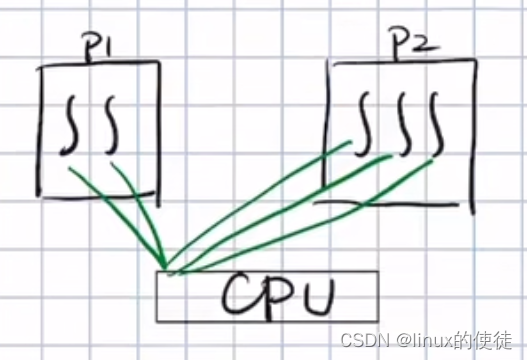
scope:有两种状态
 这两个的区别
这两个的区别
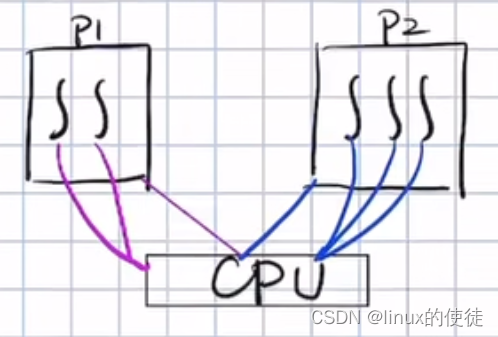
一个是系统范围,一个是进程范围,如果我有多个线程,那么他们的竞争区间是在自己的进程内,还是整个系统的进程内
 系统范围竞争
系统范围竞争
 进程内竞争
进程内竞争
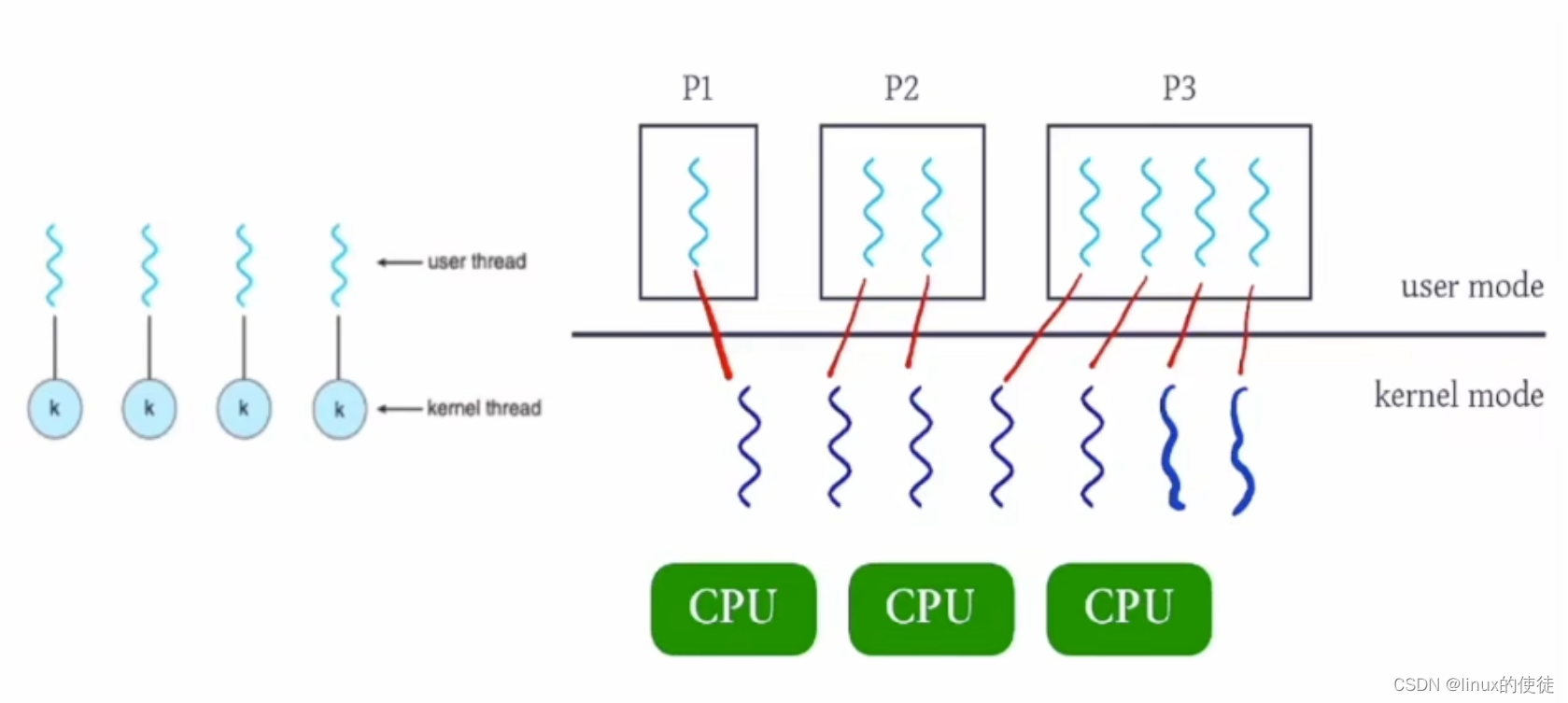
 我们linux系统的线程是系统范围竞争,我们前面学了用户模型和系统模型1对1模型,其实linux就是1
我们linux系统的线程是系统范围竞争,我们前面学了用户模型和系统模型1对1模型,其实linux就是1
inherit schedule:调度器是谁

这里可以看出是继承调度,调度器的参数和属性会被这个进程所继承。
执行策略是:SCHED_OTHER

下面两个fifo和RR一个是先进先出,一个是时间片
Linux线程调度策略总共有两种:
-
Normal Scheduling(正常调度):总共有三种,分别为SCHED_OTHER,SCHED_IDLE,SCHED_BATCH, 它的优先级数值priority_value需要设置成0,但这里并不一定意味着这个进程优先级很高,因为这个0是默认值。
-
Real_time Schedulig(实时调度):总共有两种:一种是SCHED_FIFO(先来先服务),SCHED_RR(时间片轮转),实时调度的进程总是比正常调度的进程优先级要高,它的优先级数值priority_value∈[1,99],这里和前面我们学的系统优先级不同,1是低优先级,99是高优先级
实时调度需要延迟非常低才可以实现,所以现在用户模式的进程基本都是一般都是正常调度的。
这里SCHED_OTHER是RR,现在默认的状态是这个。
linux中优先级越低,进程或线程的优先级越高
PR值越高优先级越低
一般nice值默认为0

SCHED_IDLE:一般是周期性计划任务,清理磁盘等,优先级不是很高。
可以使用 ps -eLl来查看当前线程

 LWP, light weight process 这里是4544和4545是用户模式产生的线程id
LWP, light weight process 这里是4544和4545是用户模式产生的线程id
NLWP,Number of Light-Weight Processes
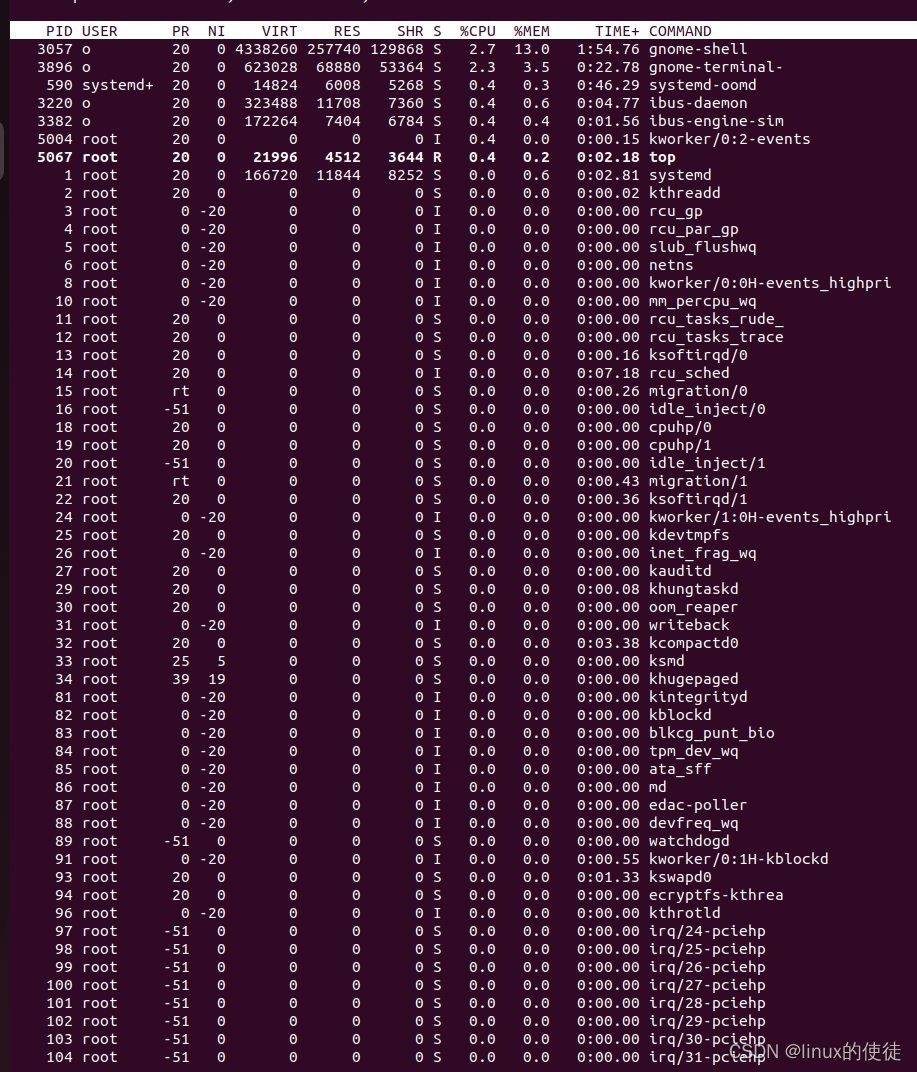
我们再用top看下
PR值为rt(实时进程)、负数(实时进程)、0(优先级极高),默认值20。
NI(nice)值:默认为0
 top -p 4544
top -p 4544
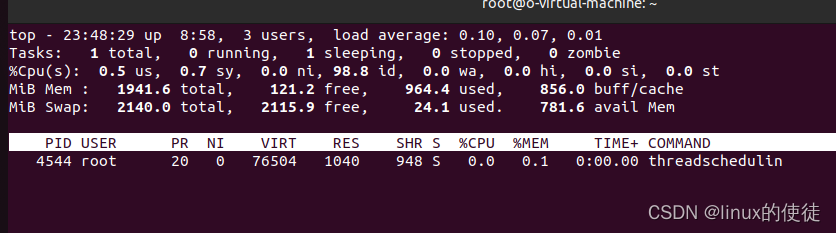
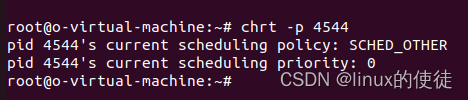
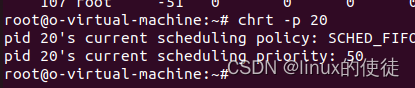
单看下当前进程的调度策略
 看一个real time的进程
看一个real time的进程

nice值仅在用户模式下有用
Real_time Scheduling【包含FIFO和RR】:
它的PR值计算公式为:PR = -1 - priority_value
所以PR∈[-100,-2]

可以看出左轴从-1开始都是rt的进程
所以我们可以通过PR值来判断一个进程/线程是Noraml Thread还是Real-time thread,是正数就
是Noraml Thread,是负数就是Real-time thread。
PR值=100


 -r转化成RR策略的rt进程
-r转化成RR策略的rt进程
-f转化成Fifo策略的rt进程
value 1~99 , 99代表优先级最高
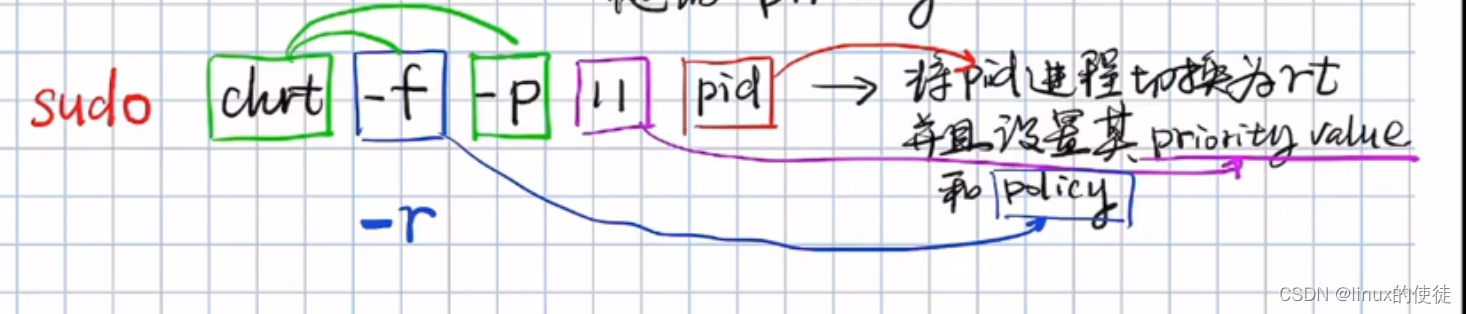 我们把我们执行的这个进程转为fifo策略的real time 进程
我们把我们执行的这个进程转为fifo策略的real time 进程

sudo chrt -f -p 11 4544

-1-value

相关文章:
Linux线程调度实验
Linux线程调度实验 1.获取线程属性 #include <stdio.h> #include <sys/types.h> #include <unistd.h> #include <pthread.h> #include <time.h> #include <stdlib.h> #include <errno.h> #define _GNU_SOURCE#define handle_error…...

洛谷P5735 【深基7.例1】距离函数 C语言/C++
【深基7.例1】距离函数 题目描述 给出平面坐标上不在一条直线上三个点坐标 (x1,y1),(x2,y2),(x3,y3)(x_1,y_1),(x_2,y_2),(x_3,y_3)(x1,y1),(x2,y2),(x3,y3),坐标值是实数,且绝对值不超过 100.00,求围成的三角形周长。保留两位…...

企业什么要建设自有即时通讯软件系统
随着科技的不断发展,各种即时通讯软件也不断发展进步,而这也与企业的发展息息相关,因为每个人,每个企业都有属于自己的机密,属于自己的隐私。 钉钉,企业微信,等公有的即时通讯软件给企业带来便利…...

LocalDNS
目录 文章目录目录本节实战DNS优化1、dns 5s 超时问题解决办法2、NodeLocal DNSCache实验软件关于我最后本节实战 实战名称💘 实战:NodeLocal DNSCache-2022.7.30(测试成功)💘 实战:NodeLocal DNSCache-2023.2.21(测试成功) DNS优…...

线程池种类和拒绝策略
1、newCachedThreadPool():可缓存的线程池,核心线程数量为0,最大线程数量为INT_MAX。线程空闲时间超过60秒被回收。适合处理大量小任务。 2、newFixedThreadPool()。固定线程个数的线程池,线程都是核心线程,没有应急线…...

Python制作9行最简单音乐播放器?不,我不满足
嗨害大家好鸭~我是小熊猫 好久不见啦~这次就来给大家整个大福利 ~ 源码资料电子书:点击此处跳转文末名片获取 最简单的9行代码音乐播放器如下: import time import pygamefile r歌曲路径 pygame.mixer.init() print(正在播放,file) track pygame.mixer.music.lo…...
零基础小白如何学会数据分析?
随着数字经济、大数据时代的发展,数据已然成为当下时代最重要的盈利资源,让企业在做决策和计划方案时更有针对性和依据,能提前预测市场发展方向,做好布局。由此而产生的数据分析岗位也逐渐被更多企业重视,特别是中大型…...
【Linux】vim的使用及常用快捷键(不会使用vim?有这篇文章就够了)
🔥🔥 欢迎来到小林的博客!! 🛰️博客主页:✈️小林爱敲代码 🛰️欢迎关注:👍点赞🙌收藏✍️留言 目录💖vim的基本概念vi…...

刷完这19道leetcode二分查找算法,不信进不了大厂
对于二分题,其实就是设定一个中间值 mid, 然后通过这个值进行一个判断 check(mid), 通过这个函数的返回值,判断将不可能的一半剪切掉; 在刷题的时候需要注意主要是两部分,check 函数的定义以及边界的选择(…...

四、Plugin Request and Sometimes pads
Request and Sometimes pads 到目前为止,我们只处理了总是可用的pad。然而,也有一些pad仅在某些情况下创建,或者仅在应用程序请求pad时创建。第一个有时被称为a;第二个被称为请求pad。pad的可用性(always, sometimes or request)可以在pad的…...

唤醒手腕 Java 后端 Springboot 结合 Redis 数据库学习笔记(更新中)
Redis 基本介绍 Redis Introduction The open source, in-memory data store used by millions of developers as a database, cache, streaming engine, and message broker. 基本概念:redis 是一个开源的、使用 C 语言编写的、支持网络交互的、可基于内存也可持…...
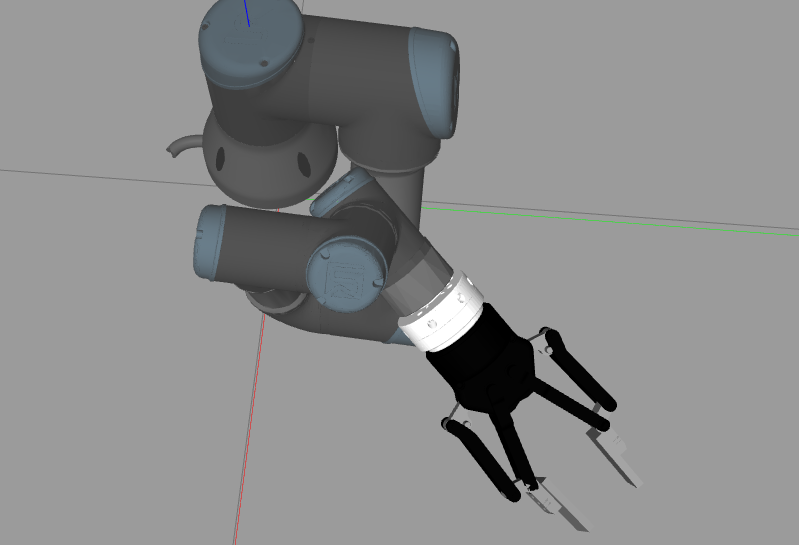
robotiq 2f 140安装在UR3机械臂后面在gazebo仿真中散架、抖动
robotiq 2f 140安装在UR3机械臂后面在gazebo仿真中散架、抖动 搭建环境: ubuntu: 20.04 ros: Nonetic sensor: robotiq_ft300 gripper: robotiq_2f_140_gripper UR: UR3 通过上一篇博客配置好ur3、力传感器和robotiq夹爪的gazebo仿真环境后,夹爪看起来…...

坐标系概念 四元数 欧拉角
1、四个概念:“地理”坐标系、“机体”坐标系、他们之间换算公式、换算公式用的系数。地理坐标系:东、北、天,以下简称地理。在这个坐标系里有重力永远是(0,0,1g),地磁永远是(0,1,x)…...

从0开始写Vue项目-SpringBoot整合Mybatis-plus实现登录、注册功能
1.从0开始写Vue项目-环境和项目搭建_慕言要努力的博客-CSDN博客 2. 从0开始写Vue项目-Vue2集成Element-ui和后台主体框架搭建_慕言要努力的博客-CSDN博客 3. 从0开始写Vue项目-Vue页面主体布局和登录、注册页面_慕言要努力的博客-CSDN博客 一、前言 在之前我们以及搭建好了基…...
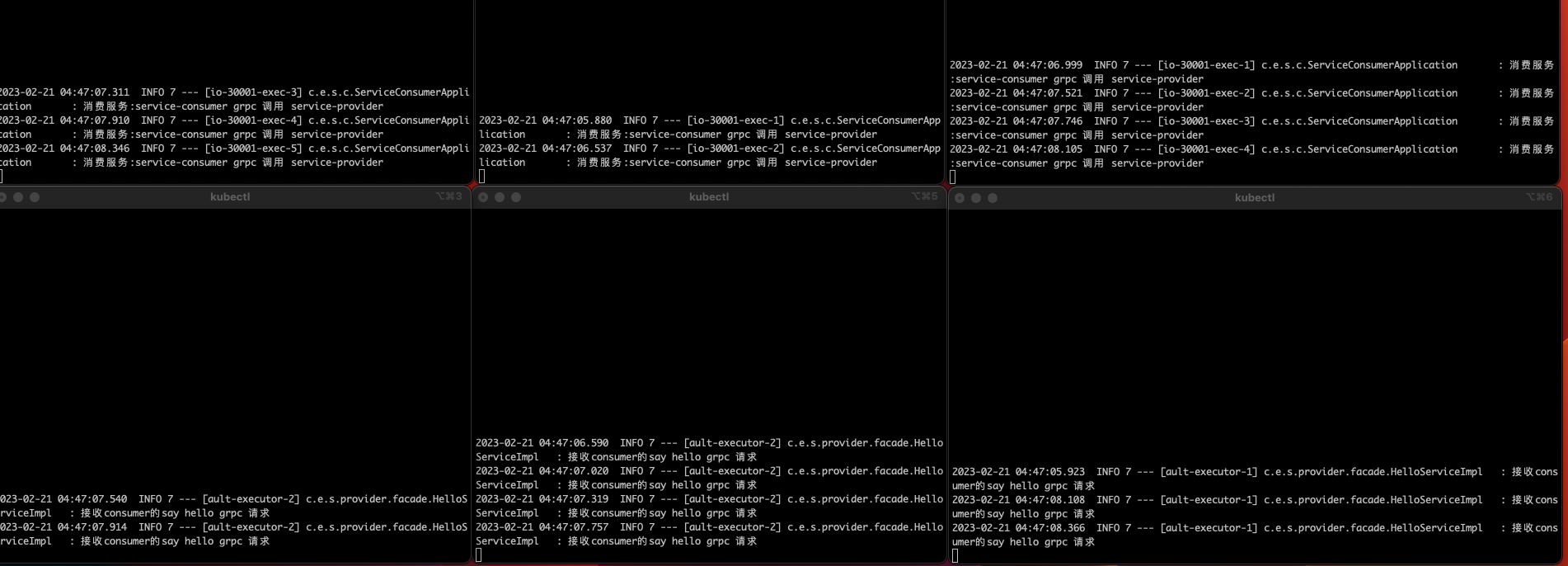
K8s中gRpc通信负载均衡失效
上篇文章在做 整合K8sSpringCloudK8sSpringBootgRpc 时,发现K8s中使用gRpc通信,负载均衡功能失效查了下gRpc的最佳实践,找到这里Load balancingSome load balancers dont work effectively with gRPC. L4 (transport) load balancers operate…...

第三届区块链服务网络(BSN)全球合作伙伴大会在杭州成功举办
为持续推动分布式技术和产业创新发展,2023年2月17日,由杭州市人民政府指导,杭州市拱墅区人民政府、国家信息中心主办,中国移动通信集团有限公司、区块链服务网络(BSN)发展联盟承办,中国移动通信…...
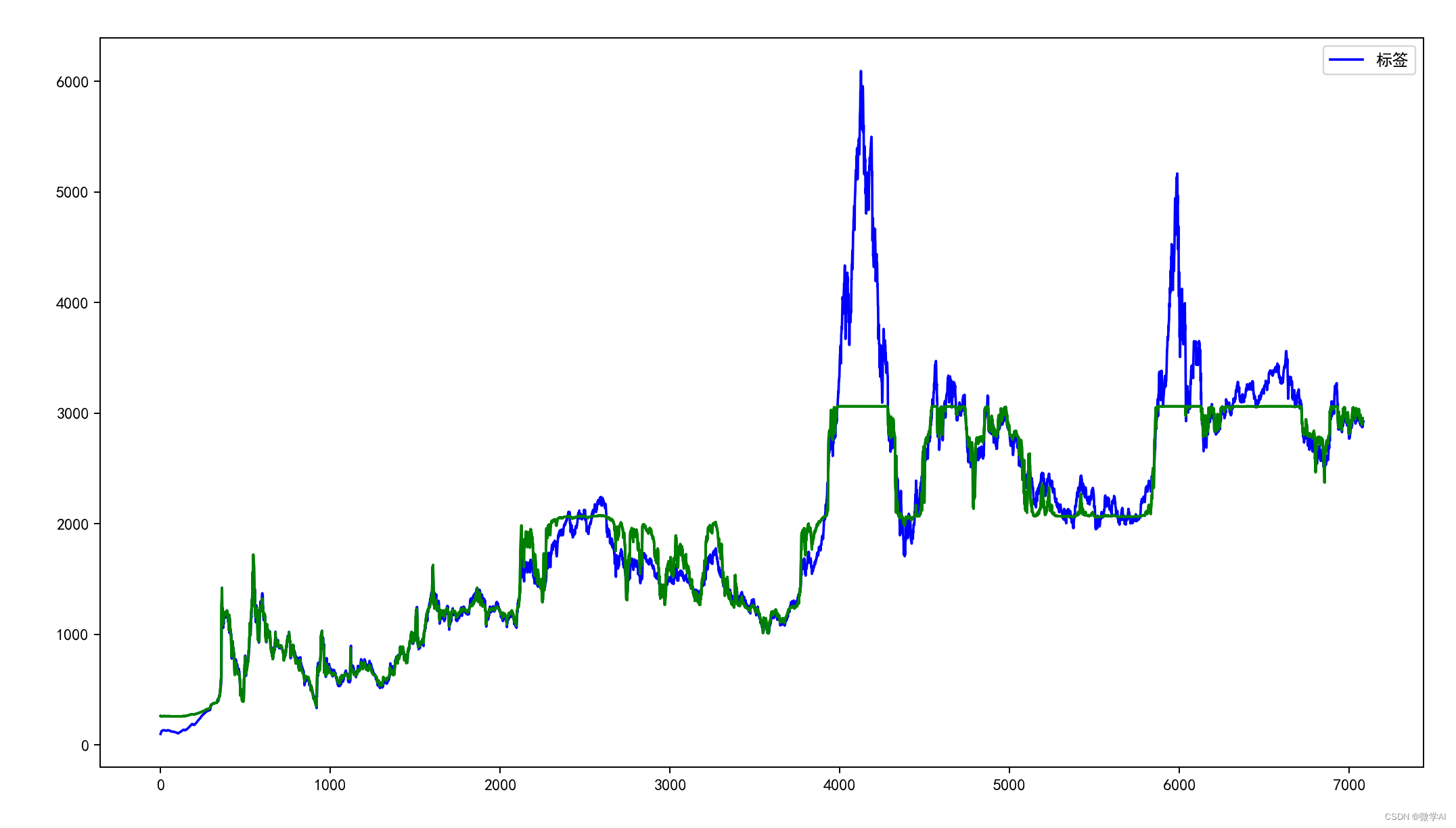
人工智能基础部分13-LSTM网络:预测上证指数走势
大家好,我是微学AI,今天给大家介绍一下LSTM网络,主要运用于解决序列问题。 一、LSTM网络简单介绍 LSTM又称为:长短期记忆网络,它是一种特殊的 RNN。LSTM网络主要是为了解决长序列训练过程中的梯度消失和梯度爆炸问题…...

内网穿透/组网/设备上云平台EasyNTS上云网关的安装操作指南
EasyNTS上云网关的主要作用是解决异地视频共享/组网/上云的需求,网页对域名进行添加映射时,添加成功后会生成一个外网访问地址,在浏览器中输入外网访问地址,即可查看内网应用。无需开放端口,EasyNTS上云网关平台会向Ea…...
易点天下基于 StarRocks 全面构建实时离线一体的湖仓方案
作者:易点天下数据平台团队易点天下是一家技术驱动发展的企业国际化智能营销服务公司,致力于为客户提供全球营销推广服务,通过效果营销、品牌塑造、垂直行业解决方案等一体化服务,帮助企业在全球范围内高效地获取用户、提升品牌知…...
Tomcat的类加载机制
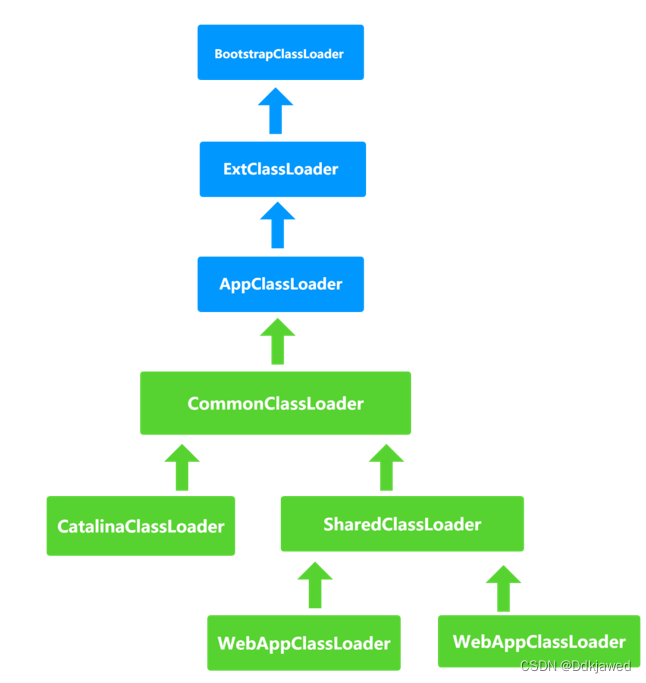
不遵循双亲委托 在JVM中并不是一次性地把所有的文件都加载到,而是按需加载,加载机制采用 双亲委托原则,如下图所示: BootStrapClassLoader 引导类加载器ExtClassLoader 扩展类加载器AppClassLoader 应用类加载器CustomClassLoad…...

保姆级教程:用iSYSTEM winIDEA和iC5000给S32K148烧录程序,附完整配置流程
从零掌握iSYSTEM工具链:S32K148开发板烧录与调试全流程实战第一次接触iSYSTEM的winIDEA和iC5000仿真器时,很多嵌入式开发者都会感到无从下手。不同于常见的开源工具链,这套专业级开发环境在汽车电子和工业控制领域有着广泛应用,尤…...

CVPR 2023反无人机数据集实战:用ModelScope上的开源模型快速上手目标检测
CVPR 2023反无人机数据集实战:用ModelScope上的开源模型快速上手目标检测无人机技术的普及带来了新的安全挑战,从隐私侵犯到关键设施威胁,反无人机技术正成为计算机视觉领域的热点。CVPR 2023反无人机竞赛提供的开源数据集和基线模型…...

Claude Code 之父:2026 年我一行代码都没写,编程已被 AI 解决
2026 年,你还在一行一行敲代码吗?Claude Code 的创造者、Anthropic 核心人物 Boris Cherny,在公开访谈里抛出一句让整个行业震动的话:2026 年到现在,我没有写过一行代码。所有开发工作,100% 交给 AI 代理完…...

新手也能懂的SSRF漏洞实战:用iwebsec靶场复现文件读取与内网探测
从零开始掌握SSRF漏洞:iwebsec靶场实战指南1. 认识SSRF漏洞的本质想象一下,你正在一家高档餐厅点餐,服务员承诺可以帮你从任何地方获取食材——包括隔壁竞争对手的厨房。SSRF(Server-Side Request Forgery)漏洞就像这个…...

HFSS仿真结果怎么看?以T型波导为例,读懂S参数与电场动态图
HFSS仿真结果深度解析:从S参数到电场动态图的实战指南当你第一次在HFSS中完成T型波导仿真后,面对满屏的曲线和彩色云图,是否感到既兴奋又困惑?那些起伏的S参数曲线究竟告诉你什么信息?电场图中跳跃的颜色又代表怎样的物…...

Arduino PWM转4-20mA工业电流信号:二阶滤波与V/I转换电路设计
1. 项目概述:从PWM到工业标准电流信号在工业自动化、过程控制和传感器领域,4-20 mA电流环是一个几乎无处不在的标准。它用4 mA代表测量值的下限(如0C),20 mA代表上限(如100C),这种设…...

告别鼠标手!5分钟上手开源鼠标连点器MouseClick,轻松实现自动化点击
告别鼠标手!5分钟上手开源鼠标连点器MouseClick,轻松实现自动化点击 【免费下载链接】MouseClick 🖱️ MouseClick 🖱️ 是一款功能强大的鼠标连点器和管理工具,采用 QT Widget 开发 ,具备跨平台兼容性 。软…...
)
告别硬编码!在UE5.1里用蓝图动态配置MySQL连接参数(控件蓝图实战)
动态配置MySQL连接:UE5.1控件蓝图的工程化实践在游戏开发中,数据库连接往往是项目架构中不可或缺的一环。传统硬编码方式虽然简单直接,却带来了维护困难、安全性差、灵活性低等一系列问题。本文将深入探讨如何在UE5.1中构建一个完全动态化的M…...

Unity项目DrawCall降不下来?试试用Mesh Baker合并贴图集,保姆级图文教程
Unity性能优化实战:用Mesh Baker合并贴图集降低DrawCall全流程解析当你的Unity项目帧率开始卡顿,Profiler里DrawCall数字居高不下时,合并贴图集往往是解决问题的关键一步。本文将以一个实际项目为例,带你从零开始使用Mesh Baker的…...

量子纠错码VarQEC:原理、实现与硬件优化
1. 量子纠错码基础与实验背景量子纠错码(Quantum Error Correction Codes, QEC)是量子计算中保护量子信息免受噪声影响的核心技术。与经典纠错码不同,量子纠错需要应对量子态特有的退相干和纠缠特性。传统QEC如[[5,1,3]]完美码虽然理论完备&a…...