【OpenGL】四、坐标系统和摄像机
坐标转换
文章目录
- 坐标转换
- 坐标系统的转换
- 局部空间(Local Space)->世界空间(World Space)
- 世界空间(World Space)->观察空间(View Space/View Space)
- 裁剪空间(Clip Space)
- MVP矩阵
坐标系统的转换
了解坐标系统和空间变换之前需要先了解一下线性代数。
其实空间转换就是相同顶点在不同坐标系下新的坐标,最后在着色器里完成
渲染。
局部空间(Local Space)->世界空间(World Space)
个人理解:使用model矩阵转换坐标系
- 只是用平移,放缩和旋转矩阵实现转化,把局部坐标(顶点坐标)通过模型原点和世界坐标原点获得各顶点的世界坐标。
- 换个理解方式,就是将局部空间的原点坐标通过矩阵变换放置到世界空间的原点坐标
- 注意要先线性变换再平移(缩放 -> 旋转 -> 平移)
model矩阵:
此代码只是旋转了每个顶点,因为当前的渲染的物体的原点坐标已经在世界原点,故此时的model矩阵可以直接为单位阵
//Learnopengl 代码
glm::mat4 model;
model = glm::rotate(model, glm::radians(-55.0f), glm::vec3(1.0f, 0.0f, 0.0f));世界空间(World Space)->观察空间(View Space/View Space)
个人理解:使用view矩阵转换坐标系
- OpenGL本身没有摄像机(Camera)的概念,摄像机的移动就是物体的反方向移动。
- 其坐标转换就是从顶点世界坐标转化到以摄像机的视角作为场景原点时的新的坐标
- 我们只需要考虑设置摄像机的位置、摄像机的朝向(方向),但仅仅这两个变量无法确定一个坐标系,我们需要引入上向量(垂直与位置和方向构成的方向向量),此时根据向量的叉乘,我们就可以确定一个新的坐标系。
- 叉乘的结果方向和叉乘的顺序有关,可以根据右手定则确定,注意OpenGL里是右手坐标系。
lookAt函数
- 第一个变量:这是你在空间中的位置,你希望从这个位置看向
center。 - 第二个变量: 是你希望看向的位置,通常这个位置是场景中的某一点。
- 第三个变量:是定义相机的上向量的方向。这个向量垂直于视线(从眼睛到目标)和水平向量。
glm::mat4 view;
view = glm::lookAt(glm::vec3(0.0f, 0.0f, 3.0f), glm::vec3(0.0f, 0.0f, 0.0f), glm::vec3(0.0f, 1.0f, 0.0f));
裁剪空间(Clip Space)
简单来说就是看不到的就不渲染。
两种投影矩阵
- 矩阵要做什么:将顶点坐标”压缩进“[-1,1]的范围,越界则被裁剪掉
- 正交(Orthographic )
- 无近大远小
- 矩阵怎么得到的:试想正交投影就是一个类似立方体的平截头箱,其先平移再修改scale,就能得到一个转成成标准化设备坐标(Normalized Device Coordinate, NDC)的矩阵
- 透视(Perspective)
- 实现的效果为近大远小,那么只需要将远平面压缩成和近平面一样,由于其类似于一个锥体,侧面看是一个三角形,它们是存在相似的关系,Z轴上,XY成比例,我们需要将每个坐标压缩,然后左乘正交矩阵就可以得到
- projection = orthographicMatrix * projectiveMatrix * projection;
用glm库直接获取:
//正交,参数就是设置了一个立方体
glm::ortho(0.0f, 800.0f, 0.0f, 600.0f, 0.1f, 100.0f);
//透视
//注意不同版本的glm是否需要使用过glm::radians函数的问题
glm::mat4 proj = glm::perspective(glm::radians(45.0f), (float)width/(float)height, 0.1f, 100.0f);
MVP矩阵
在着色器里按顺序左乘各个矩阵即可
gl_Position = projection * view * model * aPos;
相关文章:

【OpenGL】四、坐标系统和摄像机
坐标转换 文章目录 坐标转换坐标系统的转换局部空间(Local Space)->世界空间(World Space)世界空间(World Space)->观察空间(View Space/View Space)裁剪空间(Clip Space)MVP矩阵 坐标系统的转换 了解坐标系统和空间变换之前需要先了解…...
使用vcpkg管理依赖第三库
文章目录 使用vcpkg管理依赖第三库vcpkg安装vcpkg经典模式使用从仓库列表搜索依赖项从某个基线版本的列表中查询某个依赖项信息安装依赖库 vcpkg清单模式的使用vcpkg清单模式的使用例子说明 使用vcpkg管理依赖第三库 vcpkg 有两种操作模式:经典模式和清单模式。 在…...

Android渲染一个列表的过程,并提供动态改变样式
1、index.xml 布局文件,我省略了其他代码,我们需要recyclerview保证在规定范围内,如果列表元素过多可以滑动 <LinearLayoutandroid:layout_width"match_parent"android:layout_height"match_parent"android:layout_…...

Leetcode—260.只出现一次的数字III【中等】
2023每日刷题(三) Leetcode—260.只出现一次的数字III 借助lowbit的解题思想 参考的灵茶山艾府大神的题解 实现代码 /*** Note: The returned array must be malloced, assume caller calls free().*/ int* singleNumber(int* nums, int numsSize, in…...
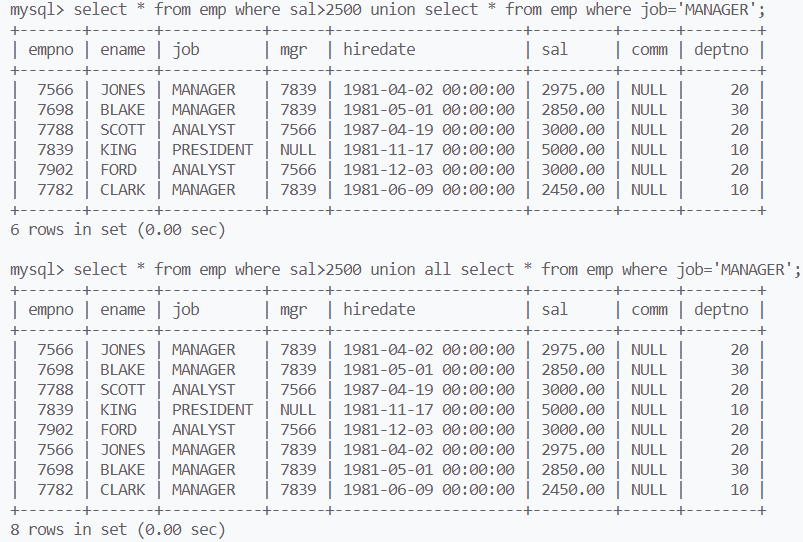
Mysql 约束,基本查询,复合查询与函数
文章目录 约束空属性约束默认值约束zerofill主键约束自增长约束唯一键约束外键约束 查询select的执行顺序单表查询排序 updatedelete整张表的拷贝复合语句group by分组查询 函数日期函数字符串函数数学函数其他函数 复合查询合并查询union 约束 空属性约束 两个值:…...
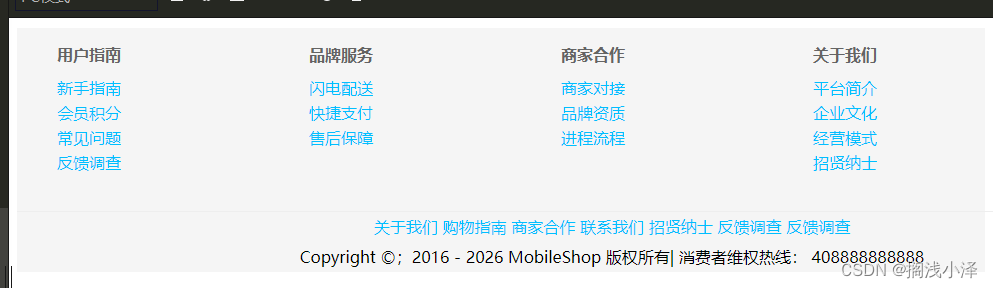
web前端基础CSS------美化页面“footer”部分
一,实验代码 <!DOCTYPE html> <html><head><meta charset"utf-8"><title>关于我们</title><style type"text/css">#footer{margin: 10px 0px;background: #f5f5f5;border: top 1px solid #eee ;}#f…...
在中国,技术到底有多有用?
🙌秋名山码民的主页 😂oi退役选手,Java、大数据、单片机、IoT均有所涉猎,热爱技术,技术无罪 🎉欢迎关注🔎点赞👍收藏⭐️留言📝 获取源码,添加WX 目录 前言1.…...

《动手学深度学习 Pytorch版》 9.2 长短期记忆网络(LSTM)
解决隐变量模型长期信息保存和短期输入缺失问题的最早方法之一是长短期存储器(long short-term memory,LSTM)。它与门控循环单元有许多一样的属性。长短期记忆网络的设计比门控循环单元稍微复杂一些,却比门控循环单元早诞生了近 2…...
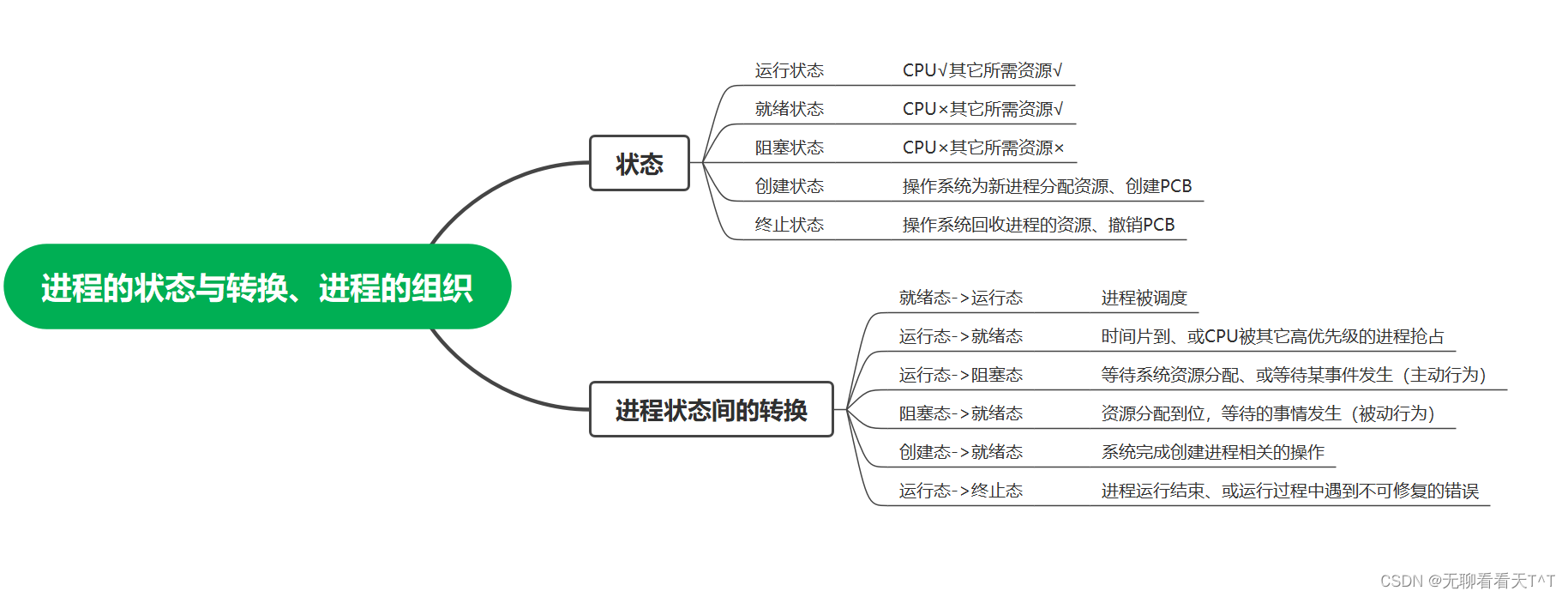
计算机操作系统-第十一天
目录 1、进程的状态 创建态与就绪态 运行态 终止态 新建态 结束态 进程状态的转换 进程的组织方式 链接方式(常见) 索引方式(少见) 本节思维导图 1、进程的状态 创建态与就绪态 1、进程正在被创建时,处于…...
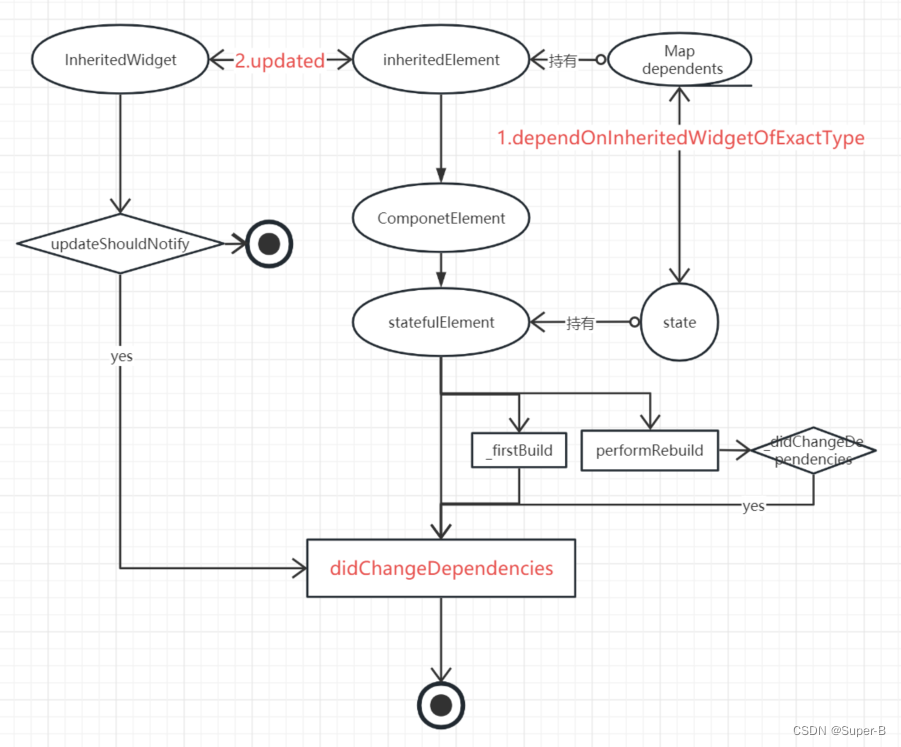
Flutter视图原理之StatefulWidget,InheritedWidget
目录 StatefulElement1. 构造函数2. build3. _firstBuild3. didChangeDependencies4. setState InheritedElement1. Element类2. _updateInheritance3. InheritedWidget数据向下传递3.1 dependOnInheritedWidgetOfExactType 4. InheritedWidget的状态绑定4.1. ProxyElement 在f…...
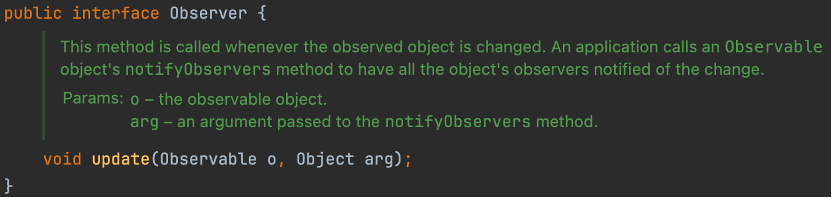
观察者模式-对象间的联动
有个商城小程序,用户希望当有新品上市的时候能通知他们。这样用户就可以不要时刻盯着小程序了。在这个场景中,用户向小程序订阅了一个服务——发送新品短信。小程序在有新品上线时负责向订阅客户发出这个消息。 这就是发布-订阅模式,也称观察…...
Webpack十大缺点:当过度工程化遇上简单的静态页面
🤍 前端开发工程师(主业)、技术博主(副业)、已过CET6 🍨 阿珊和她的猫_CSDN个人主页 🕠 牛客高级专题作者、在牛客打造高质量专栏《前端面试必备》 🍚 蓝桥云课签约作者、已在蓝桥云…...
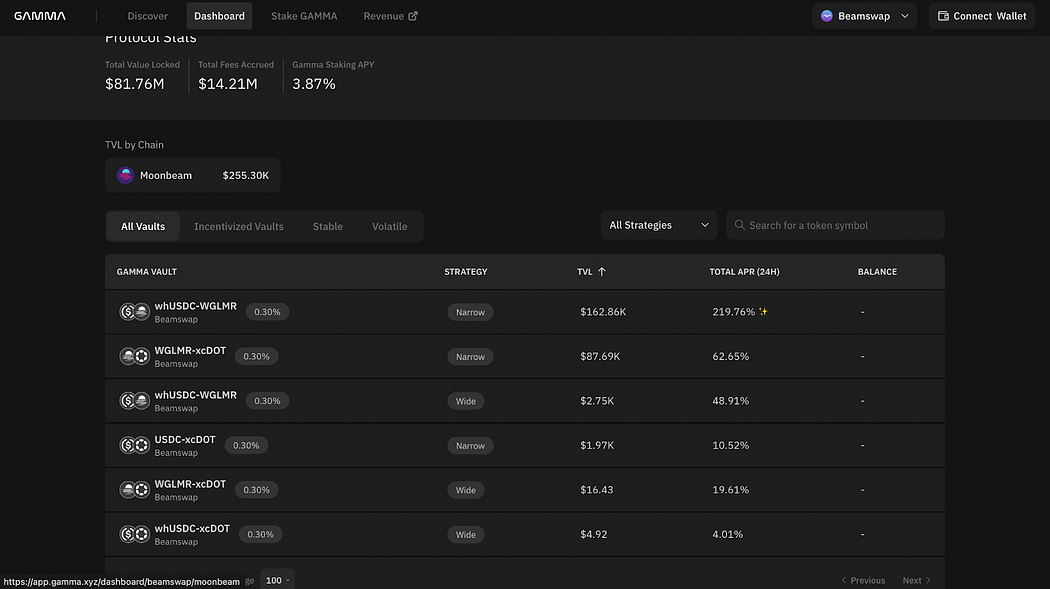
新手指南|如何快速参与Moonbeam Ignite
Moonbeam Ignite是社区熟悉的有奖链上交互活动,将有300万枚GLMR作为生态激励注入Moonbeam生态系统,体验MoonbeamMoonbeam生态的应用即可获取相应Token奖励。Beamex/Beamswap、Moonwell和Gamma作为首批参与Moonbeam Ignite的三家项目方,将在活…...

VR航天科普主题公园模拟太空舱体验馆vr航天模拟体验设备
VR航天航空体验馆巡展是一项非常受欢迎的展览活动,可以让公众在现场体验到航天飞行的乐趣。 普乐蛙VR展览组织者会设计一个航天航空主题的VR体验馆,并在馆内设置各种航天航空相关的展示内容,如太空舱、火箭发射、星际航行等。 其次࿰…...

Spring Boot OAuth 2.0整合详解
目录 一、Spring Boot 2.x 示例 1、初始化设置 2、设置重定向URI 3、配置 application.yml 4、启动应用程序 二、Spring Boot 2.x 属性映射 二、CommonOAuth2Provider 三、配置自定义提供者(Provider)属性 四、覆盖 Spring Boot 2.x 的自动配置…...
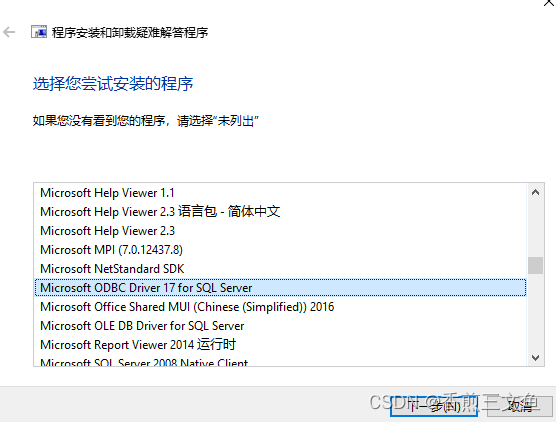
安装visual studio报错“无法安装msodbcsql“
在安装visual studio2022时安装完成后提示无法安装msodbcsql, 查看日志文件详细信息提示:指定账户已存在。 未能安装包“msodbcsql,version17.2.30929.1,chipx64,languagezh-CN”。 搜索 URL https://aka.ms/VSSetupErrorReports?qPackageIdmsodbcsql;PackageActi…...

webGL编程指南 第三章 矩阵平移三角形.translatedTriangle_Matrix
我会持续更新关于wegl的编程指南中的代码。 当前的代码不会使用书中的缩写,每一步都是会展开写。希望能给后来学习的一些帮助 git代码地址 :git 接着 上一节 中 我们使用矩阵进行旋转,这次我们使用矩阵实现位移 <!DOCTYPE html> <…...

修改echarts的tooltip样式 折线图如何配置阴影并实现渐变色和自适应
图片展示 一、引入echarts 这里不用多解释 vue里使用 import echarts from “echarts”; html页面引用js文件或用script标签引用 二、定义一个具有宽高的dom div <div id"echart-broken" style"width:400px;height: 200px;"></div>三、定义…...

[论文笔记] SurroundOcc: Multi-Camera 3D Occupancy Prediction for Autonomous Driving
Wei, Yi, et al. “Surroundocc: Multi-camera 3d occupancy prediction for autonomous driving.” Proceedings of the IEEE/CVF International Conference on Computer Vision. 2023. 重点记录 将占用网格应用到多个相机构成的3D空间中; 使用BEVFormer中的方法获取3D特征, …...
-NOA 城市辅助系统-毫末智行)
辅助驾驶功能开发-功能对标篇(16)-NOA 城市辅助系统-毫末智行
1.横向对标参数 厂商毫末智行车型魏牌摩卡DHT-PHEV上市时间发布:2022年8月30日 上市:2022年底前方案12V5R2L+1DMS摄像头前视摄像头*3【800W】侧视摄像头*4后视摄像头*1【800W】环视摄像头*4DMS摄像头*1雷达毫米波雷达*54D毫米波雷达/超声波雷达*12激光雷达*2【速腾聚创 M1,1…...

为什么要做 GeoPipeAgent
如果有多个供应商,你也可以使用 [[CC-Switch]] 来可视化管理这些API key,以及claude code 的skills。 # 多平台安装指令 curl -fsSL https://claude.ai/install.sh | bash ## Claude Code 配置 GLM Coding Plan curl -O "https://cdn.bigmodel.cn/i…...

Winhance中文版:图形化系统优化工具让Windows用户实现高效系统管理与个性化定制
Winhance中文版:图形化系统优化工具让Windows用户实现高效系统管理与个性化定制 【免费下载链接】Winhance-zh_CN A Chinese version of Winhance. C# application designed to optimize and customize your Windows experience. 项目地址: https://gitcode.com/g…...

通信协议:那些让硬件“说话“的规则
通信协议:那些让硬件"说话"的规则硬件工程师每天都在和协议打交道——调SPI、写驱动、配CAN报文。但很多人对协议的理解停留在"查手册配寄存器"层面,没有建立起系统感。这篇文章试着把这个系统搭起来:从最基本的"01…...

【计算机组成原理】——磁盘性能三要素:容量、寻址与传输的实战解析
1. 磁盘性能三要素:从理论到实战 刚接触计算机组成原理时,我对磁盘性能的理解仅限于"越大越好"。直到有次帮朋友选配NAS存储,面对商家宣传的"7200转高速盘"、"128MB缓存"等参数时,才发现自己完全不…...
和CVaR风险管理,用于求解含高比例)
CSDN首页发布文章基于Min-Max-Max-Min四层优化架构的多能源系统日前-实时两阶段鲁棒调度模型,结合了Wasserstein分布鲁棒优化(DRO)和CVaR风险管理,用于求解含高比例
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

CertMagic故障恢复终极指南:如何从证书失效中快速恢复的10个关键步骤
CertMagic故障恢复终极指南:如何从证书失效中快速恢复的10个关键步骤 【免费下载链接】certmagic Automatic HTTPS for any Go program: fully-managed TLS certificate issuance and renewal 项目地址: https://gitcode.com/gh_mirrors/ce/certmagic CertMa…...

Koikatu HF Patch完整安装指南:5步轻松解锁游戏全部潜力
Koikatu HF Patch完整安装指南:5步轻松解锁游戏全部潜力 【免费下载链接】KK-HF_Patch Automatically translate, uncensor and update Koikatu! and Koikatsu Party! 项目地址: https://gitcode.com/gh_mirrors/kk/KK-HF_Patch 还在为Koikatu游戏体验不完整…...
)
项目7-5 单表数据记录查询—— 任务7.6.6 查询结果不重复、7.6.7 范围查询、7.6.8 字符匹配查询(二)
项目7-4 单表数据记录查询—— 任务7.6.6 查询结果不重复、7.6.7 范围查询、7.6.8 字符匹配查询(二) 一、教学目标【2分钟】 **二、课程导入【4分钟】** **三、核心内容讲解** **【第一部分:概念讲解】用大白话理解三个关键字** **【第二部分:实操演示】** **四、课堂小结与…...

AI黑科技展示:CYBER-VISION零号协议实时视频分割效果
AI黑科技展示:CYBER-VISION零号协议实时视频分割效果 1. 未来已来:当AI视觉遇见赛博朋克 想象一下这样的场景:一位视障人士戴上智能眼镜,眼前的世界突然变得清晰可辨——人行道上的盲道被高亮标注,前方的障碍物用醒目…...

5分钟学会NCM文件转换:ncmdumpGUI让你的网易云音乐随处播放
5分钟学会NCM文件转换:ncmdumpGUI让你的网易云音乐随处播放 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 你是否曾经在网易云音乐下载了心爱的歌…...