三维向量旋转
三维向量旋转
问题描述
如图1所示,设一个向量 v ⃗ \vec{v} v绕另一个向量 u ⃗ = [ x , y , z ] T \vec{u}=[x,y,z]^{T} u=[x,y,z]T旋转 θ 度,变换到 v ⃗ ′ \vec{v}^{'} v′。
求旋转后得到的向量 v ⃗ ′ \vec{v}^{'} v′的表示形式。

问题分析
由于转轴 u ⃗ \vec{u} u的模长 ∣ ∣ u ⃗ ∣ ∣ ||\vec{u}|| ∣∣u∣∣对旋转结果没有影响,所以可以假设 ∣ ∣ u ⃗ ∣ ∣ = 1 ||\vec{u}||=1 ∣∣u∣∣=1。
可以将 v ⃗ \vec{v} v分解为平行于旋转轴 u ⃗ \vec{u} u以及正交(垂直)于 u ⃗ \vec{u} u的两个分量, v ⃗ ∣ ∣ \vec{v}_{||} v∣∣和 v ⃗ ⊥ \vec{v}_{\bot} v⊥,即 v ⃗ = v ⃗ ∣ ∣ + v ⃗ ⊥ \vec{v}=\vec{v}_{||}+\vec{v}_{\bot} v=v∣∣+v⊥
可以分别旋转这两个分向量,再将它们旋转的结果相加获得旋转后的向量
v ⃗ ′ = v ⃗ ∣ ∣ ′ + v ⃗ ⊥ ′ \vec{v}^{'}=\vec{v}_{||}^{'}+\vec{v}_{\bot}^{'} v′=v∣∣′+v⊥′

可以看到, v ⃗ ∣ ∣ \vec{v}_{||} v∣∣其实就是 v ⃗ \vec{v} v 在 u ⃗ \vec{u} u上的正交投影,根据正交投影的公式,可以得出:
v ⃗ ∣ ∣ = u ⃗ ⋅ v ⃗ u ⃗ ⋅ u ⃗ u ⃗ = u ⃗ ⋅ v ⃗ ∣ ∣ u ⃗ ∣ ∣ 2 u ⃗ \vec{v}_{||} = \frac{\vec{u}\cdot\vec{v}}{\vec{u}\cdot\vec{u}}\vec{u}=\frac{\vec{u}\cdot\vec{v}}{||\vec{u}||^{2}}\vec{u} v∣∣=u⋅uu⋅vu=∣∣u∣∣2u⋅vu
根据 ∣ ∣ u ⃗ ∣ ∣ = 1 ||\vec{u}||=1 ∣∣u∣∣=1,可得: v ⃗ ∣ ∣ = ( u ⃗ ⋅ v ⃗ ) u ⃗ \vec{v}_{||} = (\vec{u}\cdot\vec{v})\vec{u} v∣∣=(u⋅v)u
因为 v ⃗ = v ⃗ ∣ ∣ + v ⃗ ⊥ \vec{v}=\vec{v}_{||}+\vec{v}_{\bot} v=v∣∣+v⊥,所以: v ⃗ ⊥ = v ⃗ − v ⃗ ∣ ∣ = v ⃗ − ( u ⃗ ⋅ v ⃗ ) u ⃗ \vec{v}_{\bot} =\vec{v}-\vec{v}_{||} =\vec{v}-(\vec{u}\cdot\vec{v})\vec{u} v⊥=v−v∣∣=v−(u⋅v)u
分别求 v ⃗ ∣ ∣ \vec{v}_{||} v∣∣和 v ⃗ ⊥ \vec{v}_{\bot} v⊥的旋转结果就能得到 v ⃗ \vec{v} v的旋转结果。
v ⃗ ∣ ∣ \vec{v}_{||} v∣∣的旋转
这种情况其实非常简单,从图2中就可以看到, v ⃗ ∣ ∣ \vec{v}_{||} v∣∣其实根本就没有被旋转,仍然与旋转轴 u ⃗ \vec{u} u重合,所以:
当 v ⃗ ∣ ∣ \vec{v}_{||} v∣∣平行于旋转轴 u ⃗ \vec{u} u时,旋转 θ 角度之后的 v ⃗ ∣ ∣ ′ \vec{v}_{||}^{'} v∣∣′为: v ⃗ ∣ ∣ ′ = v ⃗ ∣ ∣ \vec{v}_{||}^{'}=\vec{v}_{||} v∣∣′=v∣∣
v ⃗ ⊥ \vec{v}_{\bot} v⊥的旋转
因为 v ⃗ ⊥ \vec{v}_{\bot} v⊥与 u ⃗ \vec{u} u的是正交的,这个旋转可以看做是平面内的一个旋转。因为旋转不改变 v ⃗ ⊥ \vec{v}_{\bot} v⊥的长度,所以旋转路径是一个圆。下面是这个旋转的示意图,右侧的为俯视图:
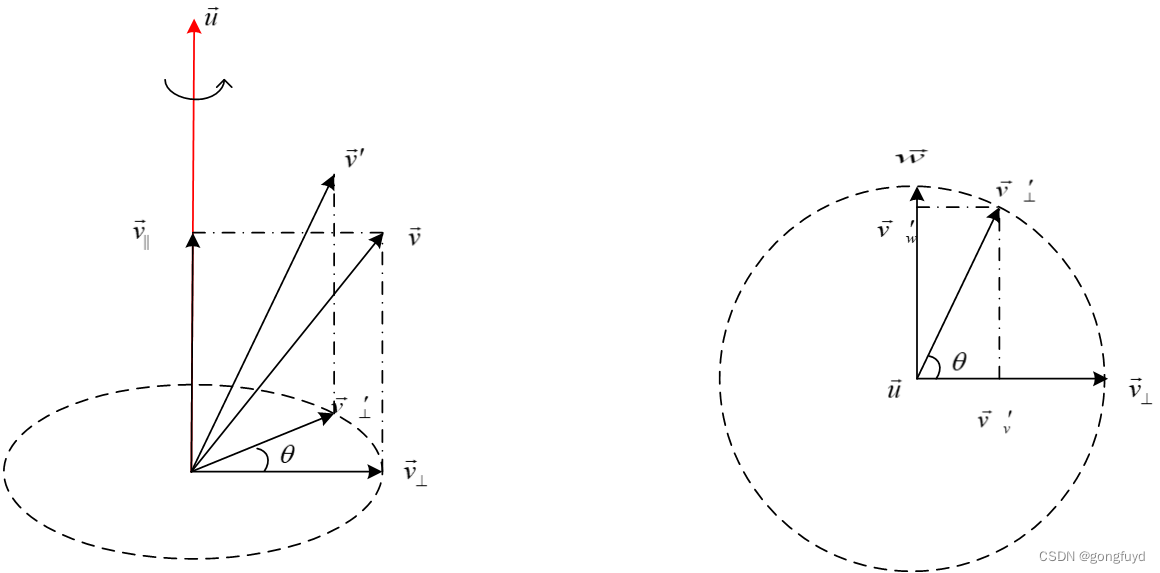
现在,3D 的旋转被转化为了 2D 平面上的旋转.由于在这个平面上们只有一个向量 v ⃗ ⊥ \vec{v}_{\bot} v⊥,用它来表示一个旋转是不够的,还需要构造一个同时正交于 u ⃗ \vec{u} u和 v ⃗ ⊥ \vec{v}_{\bot} v⊥的向量 w ⃗ \vec{w} w,这个可以通过叉乘来获得:
w ⃗ = u ⃗ × v ⃗ ⊥ \vec{w}=\vec{u}×\vec{v}_{\bot} w=u×v⊥
注意叉乘的顺序,因为使用的是右手坐标系统,按照右手定则可以发现这个新的向量 w ⃗ \vec{w} w指向 v ⃗ ⊥ \vec{v}_{\bot} v⊥逆时针旋转 𝜋/2 后的方向,并且和 v ⃗ ⊥ \vec{v}_{\bot} v⊥一样也处于正交于 u ⃗ \vec{u} u的平面内.因为 ∣ ∣ u ⃗ ∣ ∣ = 1 ||\vec{u}||=1 ∣∣u∣∣=1,可以发现 ∣ ∣ w ⃗ ∣ ∣ = ∣ ∣ u ⃗ × v ⃗ ⊥ ∣ ∣ = ∣ ∣ u ⃗ ∣ ∣ ⋅ ∣ ∣ v ⃗ ⊥ ∣ ∣ ⋅ s i n ( π / 2 ) = ∣ ∣ v ⃗ ⊥ ∣ ∣ ||\vec{w}||=||\vec{u}×\vec{v}_{\bot}||=||\vec{u}||\cdot||\vec{v}_{\bot}||\cdot sin(\pi/2)=||\vec{v}_{\bot}|| ∣∣w∣∣=∣∣u×v⊥∣∣=∣∣u∣∣⋅∣∣v⊥∣∣⋅sin(π/2)=∣∣v⊥∣∣
也就是说, w ⃗ \vec{w} w和 v ⃗ ⊥ \vec{v}_{\bot} v⊥的模长是相同的,所以, w ⃗ \vec{w} w也位于圆上.有了这个新的向量 w ⃗ \vec{w} w,就相当于在平面内有了两个坐标轴.我们现在可以把 v ⃗ ⊥ ′ \vec{v}_{\bot}^{'} v⊥′投影到 w ⃗ \vec{w} w和 v ⃗ ⊥ \vec{v}_{\bot} v⊥上,将其分解为 v ⃗ v ′ \vec{v}_{v}^{'} vv′和 v ⃗ w ′ \vec{v}_{w}^{'} vw′。使用三角学的知识就能得到: v ⃗ ⊥ ′ = v ⃗ v ′ + v ⃗ w ′ = c o s ( θ ) v ⃗ ⊥ + s i n ( θ ) w ⃗ = c o s ( θ ) v ⃗ ⊥ + s i n ( θ ) ( u ⃗ × v ⃗ ⊥ ) \vec{v}_{\bot}^{'}=\vec{v}_{v}^{'}+\vec{v}_{w}^{'}=cos(\theta)\vec{v}_{\bot}+sin(\theta)\vec{w}=cos(\theta)\vec{v}_{\bot}+sin(\theta)(\vec{u}×\vec{v}_{\bot}) v⊥′=vv′+vw′=cos(θ)v⊥+sin(θ)w=cos(θ)v⊥+sin(θ)(u×v⊥)
这也就完成了旋转的第二步,可以得到这样一个定理:
当 v ⃗ ⊥ \vec{v}_{\bot} v⊥正交于旋转轴 u ⃗ \vec{u} u时,旋转 θ 角度之后的 v ⃗ ⊥ ′ \vec{v}_{\bot}^{'} v⊥′为: v ⃗ ⊥ ′ = c o s ( θ ) v ⃗ ⊥ + s i n ( θ ) ( u ⃗ × v ⃗ ⊥ ) \vec{v}_{\bot}^{'}=cos(\theta)\vec{v}_{\bot}+sin(\theta)(\vec{u}×\vec{v}_{\bot}) v⊥′=cos(θ)v⊥+sin(θ)(u×v⊥)
v ⃗ \vec{v} v的旋转
将上面的两个结果组合就可以获得 v ⃗ ′ = v ⃗ ∣ ∣ ′ + v ⃗ ⊥ ′ = v ⃗ ∣ ∣ + c o s ( θ ) v ⃗ ⊥ + s i n ( θ ) ( u ⃗ × v ⃗ ⊥ ) \vec{v}^{'}=\vec{v}_{||}^{'}+\vec{v}_{\bot}^{'}=\vec{v}_{||}+cos(\theta)\vec{v}_{\bot}+sin(\theta)(\vec{u}×\vec{v}_{\bot}) v′=v∣∣′+v⊥′=v∣∣+cos(θ)v⊥+sin(θ)(u×v⊥)
因为叉乘遵守分配律,
u ⃗ × v ⃗ ⊥ = u ⃗ × ( v ⃗ − v ⃗ ∥ ∣ ) = u ⃗ × v ⃗ − u ⃗ × v ⃗ ∥ ∣ = u ⃗ × v ⃗ \vec{u}×\vec{v}_{\bot}= \vec{u}×(\vec{v}-\vec{v}_{\||})= \vec{u}×\vec{v}-\vec{u}×\vec{v}_{\||}= \vec{u}×\vec{v} u×v⊥=u×(v−v∥∣)=u×v−u×v∥∣=u×v
最后,将 v ⃗ ∣ ∣ = ( u ⃗ ⋅ v ⃗ ) u ⃗ \vec{v}_{||} = (\vec{u}\cdot\vec{v})\vec{u} v∣∣=(u⋅v)u与 v ⃗ ⊥ = v ⃗ − ( u ⃗ ⋅ v ⃗ ) u ⃗ \vec{v}_{\bot} =\vec{v}-(\vec{u}\cdot\vec{v})\vec{u} v⊥=v−(u⋅v)u代入 v ⃗ ′ = ( u ⃗ ⋅ v ⃗ ) u ⃗ + c o s ( θ ) ( v ⃗ − ( u ⃗ ⋅ v ⃗ ) u ⃗ ) + s i n ( θ ) ( u ⃗ × v ⃗ ) = c o s ( θ ) v ⃗ + ( 1 − c o s ( θ ) ) ( u ⃗ ⋅ v ⃗ ) u ⃗ + s i n ( θ ) ( u ⃗ × v ⃗ ) \vec{v}^{'}= (\vec{u}\cdot\vec{v})\vec{u}+cos(\theta)(\vec{v}-(\vec{u}\cdot\vec{v})\vec{u})+sin(\theta)(\vec{u}×\vec{v}) \\=cos(\theta)\vec{v}+(1-cos(\theta))(\vec{u}\cdot\vec{v})\vec{u}+sin(\theta)(\vec{u}×\vec{v}) v′=(u⋅v)u+cos(θ)(v−(u⋅v)u)+sin(θ)(u×v)=cos(θ)v+(1−cos(θ))(u⋅v)u+sin(θ)(u×v)
结论
3D 向量旋转公式(向量型,一般情况,也叫做「Rodrigues’ Rotation Formula」)
3D 空间中任意一个向量 v ⃗ \vec{v} v沿着单位向量 u ⃗ \vec{u} u旋转 θ 角度之后得到的向量 v ⃗ ′ \vec{v}^{'} v′为:
v ⃗ ′ = c o s ( θ ) v ⃗ + ( 1 − c o s ( θ ) ) ( u ⃗ ⋅ v ⃗ ) u ⃗ + s i n ( θ ) ( u ⃗ × v ⃗ ) \vec{v}^{'}=cos(\theta)\vec{v}+(1-cos(\theta))(\vec{u}\cdot\vec{v})\vec{u}+sin(\theta)(\vec{u}×\vec{v}) v′=cos(θ)v+(1−cos(θ))(u⋅v)u+sin(θ)(u×v)
致谢
本文主要参考https://github.com/Krasjet/quaternion
相关文章:
三维向量旋转
三维向量旋转 问题描述问题分析 v ⃗ ∣ ∣ \vec{v}_{||} v ∣∣的旋转 v ⃗ ⊥ \vec{v}_{\bot} v ⊥的旋转 v ⃗ \vec{v} v 的旋转结论致谢 问题描述 如图1所示,设一个向量 v ⃗ \vec{v} v 绕另一个向量 u ⃗ [ x , y , z ] T \vec{u}[x,y,z]^{T} u [x,y,z]T…...

顺序表——leetcode
原地删除数据 我们的思路这里给的是双指针,给两个指针,从前往后移动,如果不是val就覆盖,如果是我就跳过,大家一定要看到我们的条件是原地修改,所以我们不能另开一个数组来实现我们这道题目。 这里我们给两…...

Kaprekar 7641 - 1467= 6174
package homework;import java.util.Arrays;import util.StringUtil;/*** 数学黑洞数6174,即卡普雷卡尔(Kaprekar)常数, 它的算法如下: 取任意一个4位数(4个数字均为同一个数的除外)࿰…...
李宏毅机器学习笔记.Flow-based Generative Model(补)
文章目录 引子生成问题回顾:GeneratorMath BackgroundJacobian MatrixDeterminant 行列式Change of Variable Theorem简单实例一维实例二维实例 网络G的限制基于Flow的网络构架G的训练Coupling LayerCoupling Layer反函数计算Coupling Layer Jacobian矩阵计算Coupli…...

Java使用Spark入门级非常详细的总结
目录 Java使用Spark入门 环境准备 安装JDK 安装Spark 编写Spark应用程序 创建SparkContext 读取文本文件 计算单词出现次数 运行Spark应用程序 总结 Java使用Spark入门 本文将介绍如何使用Java编写Spark应用程序。Spark是一个快速的、通用的集群计算系统,它可以处理…...
kubernetes集群编排——k8s存储
configmap 字面值创建 kubectl create configmap my-config --from-literalkey1config1 --from-literalkey2config2kubectl get cmkubectl describe cm my-config 通过文件创建 kubectl create configmap my-config-2 --from-file/etc/resolv.confkubectl describe cm my-confi…...

【软件STM32cubeIDE下H73xx配置串口uart1+中断接收/DMA收发+HAL库+简单数据解析-基础样例】
#【软件STM32cubeIDE下H73xx配置串口uart1中断接收/DMA收发HAL库简单数据解析-基础样例】 1、前言2、实验器件3-1、普通收发中断接收实验第一步:代码调试-基本配置(1)基本配置(3)时钟配置(4)保存…...

jdk8和jdk9中接口的新特性
jdk8之前:声明抽象方法,修饰为public abstract。 jdk8:添加声明静态方法,默认方法。 jdk9:添加声明私有方法 jdk8: ①接口中声明的静态方法只能被接口来调用,不能使用其实现类进行调用 静态方法的声明&…...

1-爬虫-requests模块快速使用,携带请求参数,url 编码和解码,携带请求头,发送post请求,携带cookie,响应对象, 高级用法
1 爬虫介绍 2 requests模块快速使用 3 携带请求参数 4 url 编码和解码 4 携带请求头 5 发送post请求 6 携带cookie 7 响应对象 8 高级用法 1 爬虫介绍 # 爬虫是什么?-网页蜘蛛,网络机器人,spider-在互联网中 通过 程序 自动的抓取数据 的过程…...

java商城免费搭建 VR全景商城 saas商城 b2b2c商城 o2o商城 积分商城 秒杀商城 拼团商城 分销商城 短视频商城
1. 涉及平台 平台管理、商家端(PC端、手机端)、买家平台(H5/公众号、小程序、APP端(IOS/Android)、微服务平台(业务服务) 2. 核心架构 Spring Cloud、Spring Boot、Mybatis、Redis 3. 前端框架…...
【TS篇一】TypeScript介绍、使用场景、环境搭建、类和接口
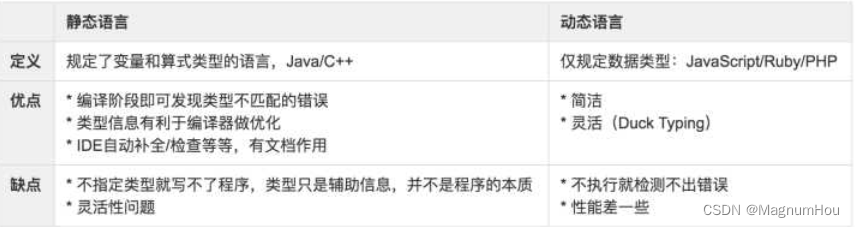
文章目录 一、TypeScript 介绍1. TypeScript 是什么1.2 静态类型和动态类型1.3 Why TypeScript1.4 TypeScript 使用场景1.5 TypeScript 不仅仅用于开发 Angular 应用1.6 前置知识 二、如何学习 TypeScript2.1 相关链接 三、起步3.1 搭建 TypeScript 开发环境3.2 编辑器的选择3.…...

Tuna: Instruction Tuning using Feedback from Large Language Models
本文是LLM系列文章,针对《Tuna: Instruction Tuning using Feedback from Large Language Models》的翻译。 Tuna:使用来自大型语言模型的反馈的指令调优 摘要1 引言2 方法3 实验4 相关工作5 结论局限性 摘要 使用更强大的LLM(如Instruction GPT和GPT-…...

uni-app 应对微信小程序最新隐私协议接口要求的处理方法
这里给大家分享我在网上总结出来的一些知识,希望对大家有所帮助 一,问题起因 最新在开发小程序的时候,调用微信小程序来获取用户信息的时候经常报错一个问题 fail api scope is not declared in the privacy agreement,api更具公告…...
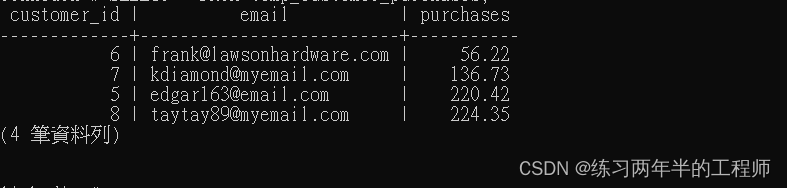
PostgreSQL 进阶 - 使用foreign key,使用 subqueries 插入,inner joins,outer joins
1. 使用foreign key 创建 table CREATE TABLE orders( order_id SERIAL PRIMARY KEY, purchase_total NUMERIC, timestamp TIMESTAMPTZ, customer_id INT REFERENCES customers(customer_id) ON DELETE CASCADE);“order_id”:作为主键的自增序列,使用 …...

【Python 千题 —— 基础篇】地板除计算
题目描述 题目描述 编写一个程序,接受用户输入的两个数字,然后计算这两个数字的地板除(整除)结果,并输出结果。 输入描述 输入两个数字,用回车隔开两个数字。 输出描述 程序将计算这两个数字的地板除…...
函数)
【随手记】np.random.choice()函数
np.random.choice() 是 NumPy 中的一个随机抽样函数,用于从给定的一维数组中随机抽取指定数量或指定概率的元素。该函数可以用于构建模拟实验、生成随机数据集、数据抽样等应用场景。 np.random.choice(a, sizeNone, replaceTrue, pNone) 的参数如下: …...
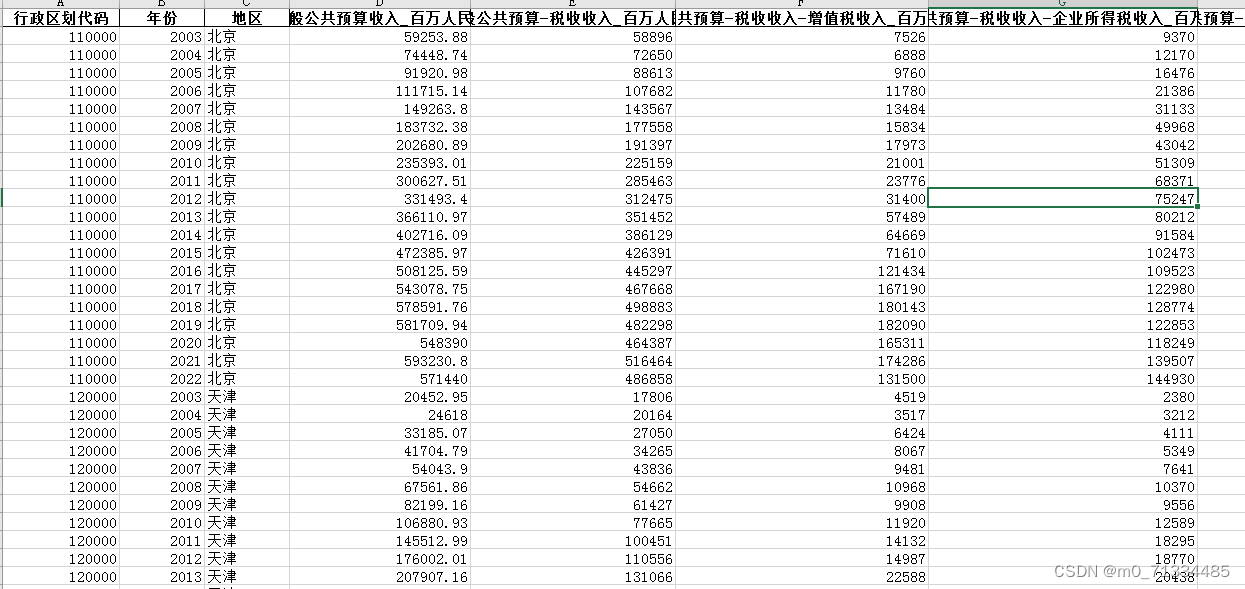
2003-2022年地级市-财政收支明细数据(企业、个人所得税、科学、教育、医疗等)
2003-2022年地级市-财政收支明细数据(企业、个人所得税、科学、教育、医疗等) 1、时间:2003-2022年 2、指标:行政区划代码、年份、地区、一般公共预算收入、一般公共预算-税收收入、一般公共预算-税收收入-增值税收入、一般公共…...

影响服务器正常使用的有哪些因素
对于网站优化来说,网站服务器的优化绝对是基础。不管是用户还是搜索引擎对于网站的打开速度都是没有太多耐心的, 所以网站优化的就是要保证网站服务器稳定,网站正常且快速的打开 1.用户体验较差 现在越来越强调用户体验,设想一下…...

NLP学习笔记:使用 Python 进行NLTK
一、说明 本文和接下来的几篇文章将介绍 Python NLTK 库。NLTK — 自然语言工具包 — NLTK 是一个强大的开源库,用于 NLP 的研究和开发。它内置了 50 多个文本语料库和词汇资源。它支持文本标记化、词性标记、词干提取、词形还原、命名实体提取、分割、分类、语义推…...

突破性技术!开源多模态模型—MiniGPT-5
多模态生成一直是OpenAI、微软、百度等科技巨头的重要研究领域,但如何实现连贯的文本和相关图像是一个棘手的难题。 为了突破技术瓶颈,加州大学圣克鲁斯分校研发了MiniGPT-5模型,并提出了全新技术概念“Generative Vokens ",…...
 一种颠覆性的软件开发新模式)
OntoFlow - AI本体智能应用开发平台 正式版(一个可以覆盖Palantir平台及底层能力的平台) 一种颠覆性的软件开发新模式
万物互联、数据感知、数字孪生、智能决策:本体智能OntoFlow’产品定位:AI本体智能应用开发平台 | 非本体建模设计平台可落地 可运行 可发布 | 非知识图谱 非设计软件 非Demo1人业务1人开发 模式 | 非传统软件开发模式半人工半AI开发 -> 未来全AI…...

蓝桥杯嵌入式模拟赛2实战复盘:用STM32G431搞定LCD、LED、按键、PWM和串口
蓝桥杯嵌入式模拟赛2全流程实战解析:从零构建STM32G431多模块协同系统 当开发板的电源指示灯第一次亮起,LCD屏幕浮现出清晰的白色字符时,我知道这不仅仅是一次普通的练习——这是将分散的模块知识整合成完整系统的关键时刻。蓝桥杯嵌入式模拟…...

汽车零部件企业 ERP 推荐清单:聚焦智能制造与供应链协同方案
汽车零部件制造业作为汽车产业的核心支撑,正经历着前所未有的变革压力。新能源汽车渗透率突破50%、主机厂JIT(准时制)交付要求日益严苛、全球化供应链波动加剧,这些趋势共同推动行业进入智能制造与供应链深度协同的新阶段。在此背…...

中控SCADA的VBS脚本玩不转了?试试用Python来“降维打击”,搞定复杂数据处理与模型调用
中控SCADA的VBS脚本玩不转了?试试用Python来“降维打击”,搞定复杂数据处理与模型调用 在工业自动化领域,中控SCADA系统长期扮演着数据采集与监控的核心角色。然而,当项目需求从简单的数据记录升级到需要复杂分析、预测性维护或实…...
》)
《字节码到JVM:Java基础核心知识点全解析(小林八股·上)》
🔥个人主页:北极的代码(欢迎来访) 🎬作者简介:java后端学习者 ❄️个人专栏:苍穹外卖日记,SSM框架深入,JavaWeb ✨命运的结局尽可永在,不屈的挑战却不可须臾或…...

科研抢发期必看:Perplexity图书推荐查询速效组合技——3分钟生成带引用格式的跨学科书单
更多请点击: https://codechina.net 第一章:科研抢发期必看:Perplexity图书推荐查询速效组合技——3分钟生成带引用格式的跨学科书单 在论文投稿前的关键窗口期,快速定位权威参考文献是提升学术严谨性与跨学科说服力的核心能力。…...

2026年产品经理必看:中国十大含金量产品岗位证书深度解析与职业进阶指南
大家好,很高兴能在这里和大家聊聊产品人的职业发展。👋转眼间我们已经步入 2026年,回首过去几年,互联网和科技行业的风向变了又变。作为在这个圈子里摸爬滚打多年的老兵,我深知大家此刻的焦虑:岗位竞争越来…...

全志V853开发板驱动7寸RGB屏:Linux DRM设备树配置与调试实战
1. 项目概述:当开发板遇上七寸RGB屏最近在折腾百问网的100ASK_V853-PRO开发板,发现一个挺有意思的需求:让它驱动一块七寸的RGB接口屏幕。这听起来像是个简单的“接线-点亮”的活儿,但真上手了才发现,从硬件引脚匹配、设…...

手把手教你用LwIP RAW API在STM32上实现一个能自动重连的TCP客户端
基于LwIP RAW API的STM32 TCP客户端自动重连实战指南 在物联网终端设备开发中,网络连接的稳定性直接决定了产品的可靠性。想象一下,一个部署在工厂车间的环境监测设备,如果因为Wi-Fi信号波动导致数据中断,可能让整个生产线失去关键…...

英雄联盟LCU工具集LeagueAkari:终极自动化游戏助手完整指南
英雄联盟LCU工具集LeagueAkari:终极自动化游戏助手完整指南 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit LeagueAkari是一款基于…...