《 机器人基础 》期末试卷(A)
一、填空题(30分,每空2分)
1. 按照相机的工作方式,机器人常用相机分为1)__ 单目摄像头
2)__ 双目摄像头 _ 3)_深度摄像头_ 三类。
2. 度量地图强调精确地表示地图中物体的位置关系,通常我们用 稀疏 与稠密 对它们进行分类。
3. 自由度定义为物体能够对坐标系进行独立运动的数目,三维空间中完全确定任意物体的位置和姿态,至少需要 __6___ __个自由度数目。
4. 按照运动和观测方程是否为线性,噪声是否服从高斯分布进行分类,分为线性/非线性和高斯/非高斯系统。
5. 地图的形式随SLAM 的应用场合而定。大体上讲,它们可以分为度量地图与拓扑地图两种。
6.在视觉SLAM 中,前端和计算机视觉研究领域更为相关,比如图像的特征提取与匹配等,后端则主要是滤波与非线性优化算法。
7. 特征点由关键点(Key-point)和描述子(Descriptor)两部分组成。
8.刚体空间运动的旋转向量到旋转矩阵可由罗德里格斯公式相互转化。
| 得分 |
二、简答题(60分,每题10分)
1. 给出机器人SLAM(Simultaneous Localization and Mapping)的定义?
2. 整体视觉SLAM流程包括哪5个主要步骤?
- 传感器信息读取。在视觉SLAM 中主要为相机图像信息的读取和预处理。如果在机器人中,还可能有码盘、惯性传感器等信息的读取和同步。
- 视觉里程计(Visual Odometry, VO)。视觉里程计任务是估算相邻图像间相机的运动,以及局部地图的样子。VO 又称为前端(Front End)。
- 后端优化(Optimization)。后端接受不同时刻视觉里程计测量的相机位姿,以及回环检测的信息,对它们进行优化,得到全局一致的轨迹和地图。由于接在VO 之后,又称为后端(Back End)。
- 回环检测(Loop Closing)。回环检测判断机器人是否曾经到达过先前的位置。如果检测到回环,它会把信息提供给后端进行处理。
- 建图(Mapping)。它根据估计的轨迹,建立与任务要求对应的地图。
3. 计算机视觉领域的研究者设计了许多更加稳定的局部图像特征,如著名的SIFT, SURF,ORB等等。相比于朴素的角点,这些人工设计的特征点拥有哪些特性?
- 可重复性(Repeatability):相同的“区域”可以在不同的图像中被找到。
- 可区别性(Distinctiveness):不同的“区域”有不同的表达。
- 高效率(Efficiency):同一图像中,特征点的数量应远小于像素的数量。
- 本地性(Locality):特征仅与一小片图像区域相关。
4. 列出扩展Kalman滤波器(EKF)的三点局限性。
- 滤波器方法在一定程度上假设了马尔可夫性,也就是k 时刻的状态只与k+1时刻相关,而与k + 1 之前的状态和观测都无关(或者和前几个有限时间的状态相关)。这有点像是在视觉里程计中,只考虑相邻两帧关系一样。如果当前帧确实与很久之前的数据有关(例如回环),那么滤波器就会难以处理这种情况。
- EKF 滤波器仅在^x(k+1) 处做了一次线性化,然后就直接根据这次线性化结果,把后验概率给算了出来。这相当于在说,我们认为该点处的线性化近似,在后验概率处仍然是有效的。而实际上,当我们离开工作点较远的时候,一阶泰勒展开并不一定能够近似整个函数,这取决于运动模型和观测模型的非线性情况。如果它们有强烈的非线性,那线性近似就只在很小范围内成立,不能认为在很远的地方仍能用线性来近似。这就是EKF 的非线性误差,是它的主要问题所在。
- 从程序实现上来说,EKF 需要存储状态量的均值和方差,并对它们进行维护和更新。如果把路标也放进状态的话,由于视觉SLAM 中路标数量很大,这个存储量是相当可观的,且与状态量呈平方增长(因为要存储协方差矩阵)。因此,EKF SLAM 普遍被认为不可适用于大型场景。
5.语义与SLAM两个领域结合能够带来哪两个方面的优势。
- 语义帮助SLAM。传统的物体识别、分割算法往往只考虑一个图,而在SLAM 中我们拥有一台移动的相机。如果我们把运动过程中的图片都带上物体标签,就能得到一个带有标签的地图。另外,物体信息亦可为回环检测、BA 优化带来更多的条件。
- SLAM 帮助语义。物体识别和分割都需要大量的训练数据。要让分类器识别各个角度的物体,需要从不同视角采集该物体的数据,然后进行人工标定,非常辛苦。而SLAM 中,由于我们可以估计相机的运动,可以自动地计算物体在图像中的位置,节省人工标志的成本。如果有自动生成的带高质量标注的样本数据,能够很大程度上加速分类器的训练过程。
6. 给出单目相机的成像的4个步骤。
- 首先,世界坐标系下有一个固定的点 P ,世界坐标为 Pw ;
- 由于相机在运动,它的运动由 R, t 或变换矩阵 T ∈ SE(3) 描述。P 的相机坐标为:P˜c = RPw + t。
- 这时的 P˜c 仍有 X, Y, Z 三个量,把它们投影到归一化平面 Z = 1 上,得到 P 的归 一化相机坐标:Pc = [X/Z, Y /Z, 1]T ①。
- 最后,P 的归一化坐标经过内参后,对应到它的像素坐标:Puv = KPc。
三、计算题(10分,每题10分)
1. 已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。求u, v, w, t各点的齐次坐标。
解:点u的齐次坐标为:
v = Rot(z,90°)u =
w = Rot(y,90°)v =
t = Trans(4,-3,7)w =
1(SLAM是什么)、15(相机类别) 、19(SLAM流程)、46、55、85、154(人工设计的特征点特性)、158、207、221、241(EKF局限性)、285、341
相关文章:
)
《 机器人基础 》期末试卷(A)
一、填空题(30分,每空2分) 1. 按照相机的工作方式,机器人常用相机分为1)__ 单目摄像头 2)__ 双目摄像头 _ 3)_深度摄像头_ 三类。 2. 度量地图强调…...

Azure Machine Learning - Azure AI 搜索中的矢量搜索
矢量搜索是一种信息检索方法,它使用内容的数字表示形式来执行搜索方案。 由于内容是数字而不是纯文本,因此搜索引擎会匹配与查询最相似的矢量,而不需要匹配确切的字词。本文简要介绍了 Azure AI 搜索中的矢量支持。 其中还解释了与其他 Azure…...

3 redis实现一个消息中间件
使用list实现一个队列,可以从左侧入队,也可以从右侧入对 即可以从左侧读取,也可以从右侧读取 1、Lindex Lindex 命令用于通过索引获取列表中的元素 也可以使用负数下标,以 -1 表示列表的最后一个元素, -2 表示列表的…...

js添加dom到指定div之后,并给添加的dom类名,然后设置其样式,以及el-popover层级z-index过高问题解决。
遇到一个需求,Vue项目做一个表格,要求表头与表格内容分开,如下效果所示,表头与表格有个高度间隔边距(箭头所示),因为默认我们的el-table的表头与内容是一起的: 思路:通过querySelector获取el-table__header-wrapper元素,通过createElement创建一个div,通过 newElem…...

C语言结构体
#include <stdio.h> #include <string.h> #include <stdlib.h>//struct Student_s { // int num; // char name[20]; // char gender; // int age; // float Chinese; // float Math; // float English; // char addr[30]; //}; //最后的分号一定要写&#x…...
【Python大数据笔记_day10_Hive调优及Hadoop进阶】
hive调优 hive官方配置url: Configuration Properties - Apache Hive - Apache Software Foundation hive命令和参数配置 hive参数配置的意义: 开发Hive应用/调优时,不可避免地需要设定Hive的参数。设定Hive的参数可以调优HQL代码的执行效率,或帮助定位问…...
React经典初级错误
文章 前言错误场景问题分析解决方案后言 前言 ✨✨ 他们是天生勇敢的开发者,我们创造bug,传播bug,毫不留情地消灭bug,在这个过程中我们创造了很多bug以供娱乐。 前端bug这里是博主总结的一些前端的bug以及解决方案,感兴…...
 和 System.Array.Clone() 有什么区别)
C# System.Array.CopyTo() 和 System.Array.Clone() 有什么区别
System.Array.CopyTo() 和 System.Array.Clone() 是用于数组复制的两种不同方法,它们在实现和用途上有一些区别。 System.Array.CopyTo() 方法: CopyTo() 方法用于将数组的元素复制到另一个数组。它是 Array 类的实例方法,可以用于复制一个…...

Stable Diffusion 启动时 got an unexpected keyword argument ‘socket_options‘ 错误解决
Stable Diffusion 启动时 got an unexpected keyword argument socket_options 错误解决 问题解决方法 问题 Launching Web UI with arguments: Traceback (most recent call last):File "launch.py", line 48, in <module>main()File "launch.py"…...

CSS 文本属性篇
文字颜色 属性名:color作用:控制文字的颜色可选值: 1.颜色名 color: blue; 2.rgb或rgba color:rgb(132, 220, 254); color:rgba(132, 220, 254,0.5); 3.hex或hexa(十六进制) color:#0078d4; color:#0078d48b; 4.hsl或h…...
Activiti,Apache camel,Netflex conductor对比,业务选型
Activiti,Apache camel,Netflex conductor对比,业务选型 1.activiti是审批流,主要应用于人->系统交互,典型应用场景:请假,离职等审批 详情可见【精选】activti实际使用_activiti通过事件监听器实现的优势_记录点滴…...
pythom导出mysql指定binlog文件
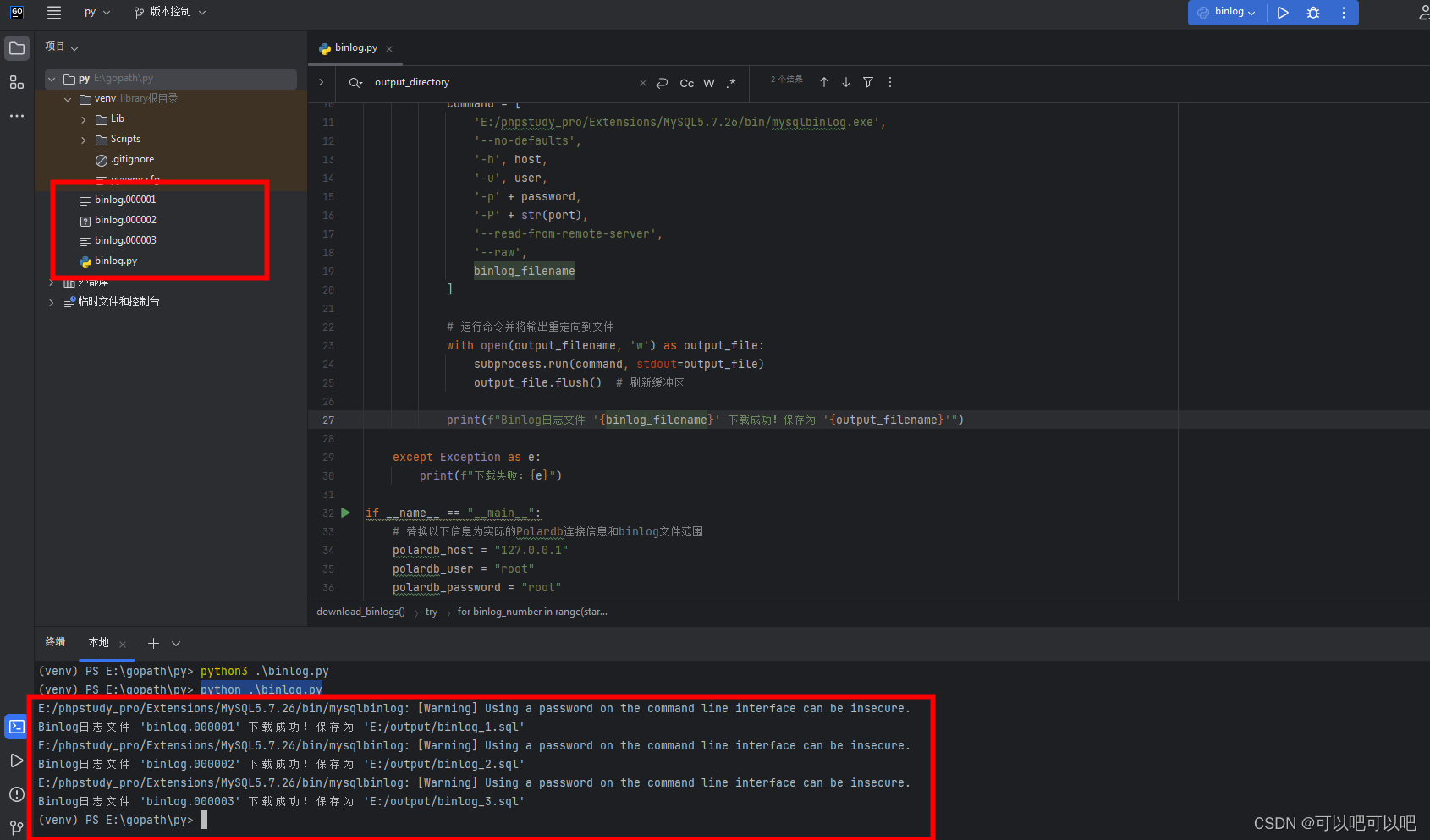
要求 要求本地有py环境和全局环境变量 先测试直接执行binlog命令执行命令 Windows 本地直接执行命令 # E:\output>E:\phpstudy_pro\Extensions\MySQL5.7.26\bin\mysqlbinlog binglog文件地址 # --no-defaults 不限制编码 # -h mysql链接地址 # -u mysql 链接名称 # -p m…...

TDengine 跨版本迁移实战
TDengine 3.0 已经退出了近一年,目前已经到了 3.2 版本。很遗憾的是 2.x 和 3.x 之间的数据文件不兼容。 如果向从 2.x 升级到 3.x 只能选择数据迁移的方式。 目前数据迁移有三种方法: 使用官方推荐工具 taosx。使用 taosdump 工具。自己写程序。 迁移…...
FPGA设计时序约束八、others类约束之Set_Case_Analysis
目录 一、序言 二、Set Case Analysis 2.1 基本概念 2.2 设置界面 2.3 命令语法 2.4 命令示例 三、工程示例 四、参考资料 一、序言 在Vivado的时序约束窗口中,存在一类特殊的约束,划分在others目录下,可用于设置忽略或修改默认的时序…...

xftp连接wsl2
在WSL中默认是没有安装OpenSSH,需要自己安装。 安装 sudo apt update sudo apt install openssh-server检查是否安装成功 ssh -V配置ssh sudo vim /etc/ssh/ssh_config设置端口 Port 22启动ssh服务 sudo service ssh startxftp连接 主机地址:127.…...
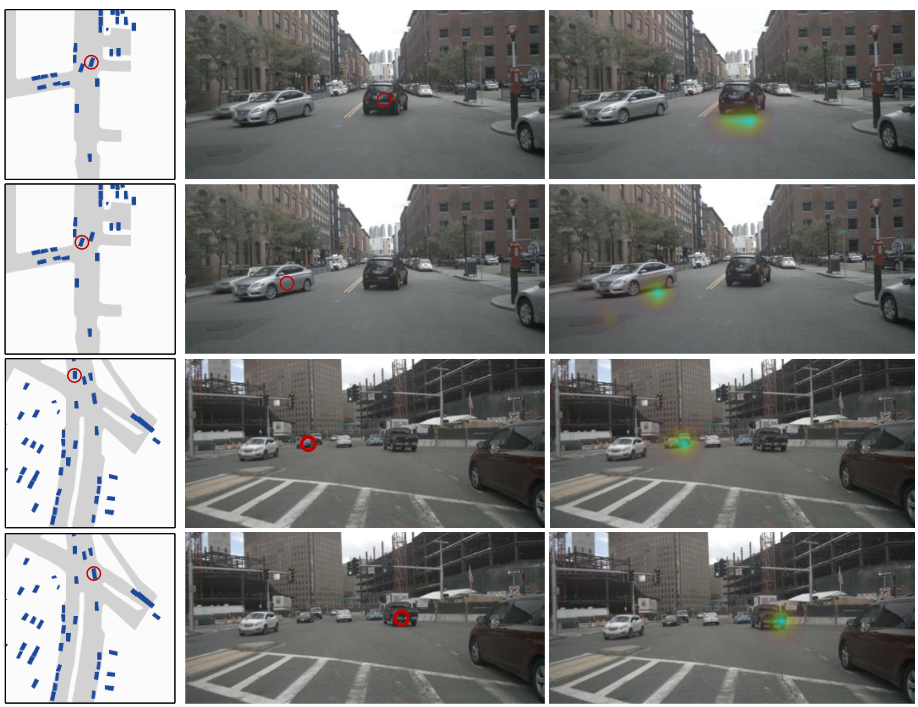
Cross-View Transformers for Real-Time Map-View Semantic Segmentation 论文阅读
论文链接 Cross-View Transformers for Real-Time Map-View Semantic Segmentation 0. Abstract 提出了 Cross-View Transformers ,一种基于注意力的高效模型,用于来自多个摄像机的地图视图语义分割使用相机感知的跨视图注意机制隐式学习从单个相机视…...

MySQL InnoDB 引擎底层解析(一)
6. InnoDB 引擎底层解析 MySQL 对于我们来说还是一个黑盒,我们只负责使用客户端发送请求并等待服务器返回结果,表中的数据到底存到了哪里?以什么格式存放的?MySQL 是以什么方式来访问的这些数据?这些问题我们统统不知…...
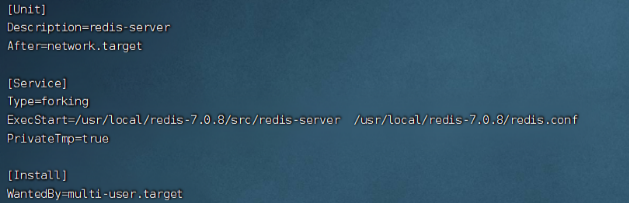
redis安装(Windows和linux)
如何实现Redis安装与使用的详细教程 Redis 简介 Redis是一个使用C语言编写的开源、高性能、非关系型的键值对存储数据库。它支持多种数据结构,包括字符串、列表、集合、有序集合、哈希表等。Redis的内存操作能力极强,其读写性能非常优秀,且…...
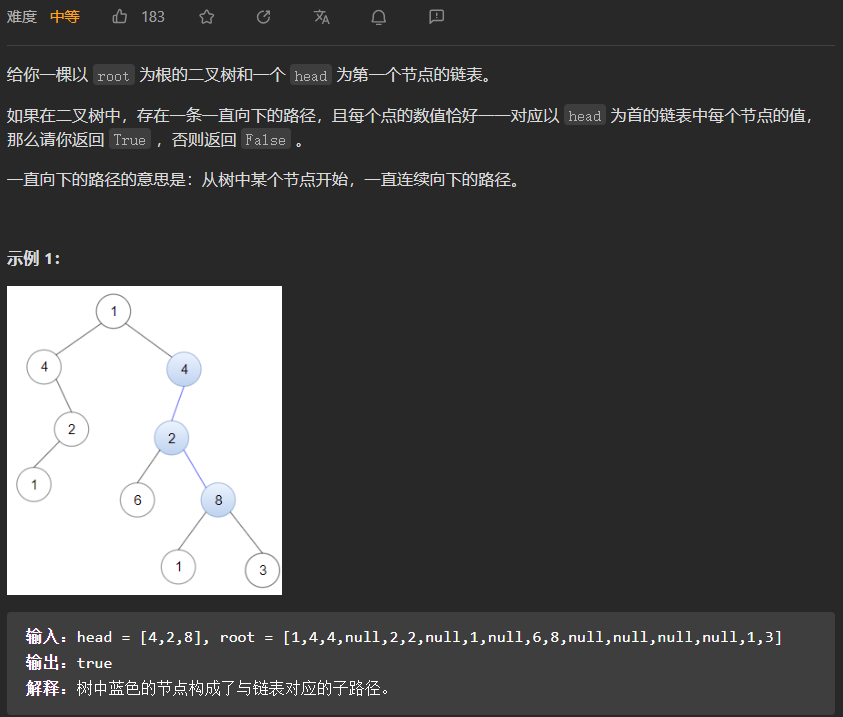
【LeetCode刷题-树】--1367.二叉树中的链表
1367.二叉树中的链表 方法:枚举 枚举二叉树中的每个节点为起点往下的路径是否与链表相匹配的路径,为了判断是否匹配设计了一个递归函数dfs(root,head),其中root表示当前匹配到的二叉树节点,head表示当前匹配到的链表节点,整个函数…...

【嵌入式 – GD32开发实战指南(ARM版本)】第2部分 外设篇 - 第3章 温度传感器DS18B20
1 理论分析 1.1 DS18B20概述 DS18B20 是 DALLAS 最新单线数字温度传感器,新的"一线器件"体积更小、适用电压更宽、更经济。Dallas 半导体公司的数字化温度传感器 DS1820 是世界上第一片支持 "一线总线"接口的温度传感器。 DS18B20采用的单总线协议,也…...

Lilishop:基于Spring Boot3的B2B2C开源商城系统全解析
引言在数字化转型浪潮席卷各行各业的今天,电商系统已成为企业拓展线上业务的核心基础设施。然而,从零构建一套功能完备、性能卓越、可扩展的商城系统,不仅需要投入大量研发资源,还面临技术选型、架构设计、安全合规等诸多挑战。开…...

2026 收藏版|LangGraph 智能体三大核心工作流,程序员零基础上手大模型开发
本篇全面剖析 2026 主流 LangGraph 智能体三类经典工作流架构,依托任务拆分校验、智能任务分发、多任务并行处理三种思路,全方位提升大模型智能体运行精度与处理效率。每类模式均搭配可直接运行的实战代码案例,贴合新手学习场景,帮…...

从《苏珊的微笑》到你的角色:手把手教你用UE5的Morph Target曲线驱动自定义面部动画
从《苏珊的微笑》到你的角色:手把手教你用UE5的Morph Target曲线驱动自定义面部动画在数字角色动画领域,面部表情的细腻表现往往是区分业余与专业作品的关键分水岭。许多创作者在掌握了基础骨骼动画后,面对角色面部动画的实现却陷入困境——为…...

Zilliqa安全机制详解:PoW与分片如何保障区块链安全
Zilliqa安全机制详解:PoW与分片如何保障区块链安全 【免费下载链接】zq1 Zilliqa is the worlds first high-throughput public blockchain platform - designed to scale to thousands of transactions per second. 项目地址: https://gitcode.com/gh_mirrors/…...

如何为sync-settings开发自定义存储位置插件:完整开发者指南
如何为sync-settings开发自定义存储位置插件:完整开发者指南 【免费下载链接】sync-settings Synchronize all your settings and packages across atom instances 项目地址: https://gitcode.com/gh_mirrors/sy/sync-settings 你是否想要为Atom的sync-setti…...

Unity 2019.4 接入MAX聚合广告SDK避坑全记录:从Applovin配置到Google Admob广告单元关联
Unity 2019.4集成MAX聚合广告SDK实战指南:从配置到优化的完整解决方案在移动游戏开发领域,广告变现一直是开发者收入的重要来源。对于使用Unity 2019.4版本的开发者来说,如何高效集成MAX聚合广告SDK并关联Google Admob广告单元,是…...

【AI搜索引擎未来5年趋势白皮书】:20位顶尖AI架构师联合预测的7大不可逆变革
更多请点击: https://intelliparadigm.com 第一章:AI搜索引擎未来5年趋势总览 AI搜索引擎正从关键词匹配的“检索工具”加速演进为具备推理能力、上下文感知与主动服务意识的“智能认知中枢”。未来五年,其技术演进将围绕多模态理解、实时知…...
)
ChatGPT绘画提示词生成效率革命(92%设计师不知道的5层语义嵌套法)
更多请点击: https://kaifayun.com 第一章:ChatGPT绘画提示词生成效率革命(92%设计师不知道的5层语义嵌套法) 传统提示词工程常陷于“关键词堆砌”误区,而真正高阶的生成控制源于语义结构的纵深组织。5层语义嵌套法将…...

别再手动调参了!用pmdarima的auto_arima批量预测300家门店销售额,我踩过的坑都在这
批量时间序列预测实战:用auto_arima高效处理300家门店销售数据的避坑指南当面对300家连锁门店的日销售额预测需求时,传统ARIMA建模方法会迅速暴露其局限性——手动调参不仅耗时费力,还会因人为判断差异导致模型效果参差不齐。这正是为什么越来…...

2026最好用的图片处理工具推荐:去水印 / 抠图 / 高清化实测对比
2026最好用的图片处理工具推荐:去水印 / 抠图 / 高清化实测对比 前言:一张图片毁掉一个项目?别让烂工具耽误你 2026年,AI图片处理技术早已不是三年前的水平。发丝级抠图、去水印无痕、超分辨率重建……这些功能听起来很美好&…...