【算法】FFT-1(递归实现)(不包括IFFT)
FFT
- 多项式
- 多项式乘法
- 复数及运算
- 导数
- 泰勒公式及展开式
- 欧拉公式
- 单位根
- FFT
- Code
- IFFT
多项式
我们从课本中可以知道,一个 n − 1 n-1 n−1 次的多项式可以写成 a 0 + a 1 x + a 2 x 2 + a 3 x 3 + ⋯ + a n − 1 x n − 1 a_{0}+a_{1}x+a_{2}x^2+a_{3}x^3+\dots+a_{n-1}x^{n-1} a0+a1x+a2x2+a3x3+⋯+an−1xn−1
用高级一点的表示法就是:
一个 n − 1 n-1 n−1 次 n n n 项多项式 f ( x ) f(x) f(x) 可以表示为:
f ( x ) = ∑ i = 0 n − 1 a i x i f(x)=\sum_{i=0}^{n-1}a_ix^i f(x)=∑i=0n−1aixi
所以我们可以用每一项的系数来表示 f ( x ) f(x) f(x),即
f ( x ) = { a 0 , a 1 , a 2 , … , a n − 1 } f(x)=\{a_0,a_1,a_2,\dots,a_{n-1}\} f(x)={a0,a1,a2,…,an−1}
俗称系数表示法。
但是,当我们把这个多项式看成一个函数时,我们将 n n n 个不同的 x x x 带入,会得到 n n n 个不一样的 y y y,而我们就得到了 n n n 个点的坐标,它们确定唯一的多项式 f ( x ) f(x) f(x)
证明很简单,直接待定系数法就可以解决。
那么 f ( x ) f(x) f(x) 还可以用这 n n n 个点表示:
f ( x ) = { ( x 0 , y 0 ) , ( x 1 , y 1 ) , ( x 2 , y 2 ) , … , ( x n − 1 , y n − 1 ) } f(x)=\{(x_0,y_0),(x_1,y_1),(x_2,y_2),\dots,(x_{n-1},y_{n-1})\} f(x)={(x0,y0),(x1,y1),(x2,y2),…,(xn−1,yn−1)}
(其中 y i = f ( x i ) y_i=f(x_i) yi=f(xi))
俗称点值表示法。
多项式乘法
对于两个系数表示法表示的多项式 f ( x ) f(x) f(x) 和 g ( x ) g(x) g(x),如果要计算它们的乘积 h ( x ) h(x) h(x),我们需要枚举 f ( x ) f(x) f(x) 的每一项和 g ( x ) g(x) g(x) 的每一项相乘,最后累计,时间复杂度 O ( n 2 ) O(n^2) O(n2)
那么换成点值表示呢?时间复杂度为 O ( n ) O(n) O(n)
Why?
设两个多项式 f ( x ) f(x) f(x) 和 g ( x ) g(x) g(x) 分别为:
f ( x ) = { ( x 0 , y 1 0 ) , ( x 1 , y 1 1 ) , ( x 2 , y 1 2 ) , … , ( x n − 1 , y 1 n − 1 ) } f(x)=\{(x_0,y1_0),(x_1,y1_1),(x_2,y1_2),\dots,(x_{n-1},y1_{n-1})\} f(x)={(x0,y10),(x1,y11),(x2,y12),…,(xn−1,y1n−1)}
(其中 y 1 i = f ( x i ) y1_i=f(x_i) y1i=f(xi))
g ( x ) = { ( x 0 , y 2 0 ) , ( x 1 , y 2 1 ) , ( x 2 , y 2 2 ) , … , ( x n − 1 , y 2 n − 1 ) } g(x)=\{(x_0,y2_0),(x_1,y2_1),(x_2,y2_2),\dots,(x_{n-1},y2_{n-1})\} g(x)={(x0,y20),(x1,y21),(x2,y22),…,(xn−1,y2n−1)}
(其中 y 2 i = g ( x i ) y2_i=g(x_i) y2i=g(xi))
那么结果 h ( x ) h(x) h(x) 为:
h ( x ) = { ( x 0 , y 2 0 ⋅ y 1 0 ) , ( x 1 , y 2 1 ⋅ y 1 1 ) , ( x 2 , y 2 2 ⋅ y 1 2 ) , … , ( x n − 1 , y 2 n − 1 ⋅ y 1 n − 1 ) } h(x)=\{(x_0,y2_0 \cdot y1_0),(x_1,y2_1 \cdot y1_1),(x_2,y2_2 \cdot y1_2),\dots,(x_{n-1},y2_{n-1} \cdot y1_{n-1})\} h(x)={(x0,y20⋅y10),(x1,y21⋅y11),(x2,y22⋅y12),…,(xn−1,y2n−1⋅y1n−1)}
好,我们就结束了
但是怎么将系数表示法转换为点值表示法呢?
复数及运算
高中课本里讲过复数,不过不知道也没关系,这里会讲。
定义:复数单位 i i i 满足 i 2 = − 1 i^2=-1 i2=−1,则形如 a + b i a+bi a+bi 的数为复数。 ( a , b ∈ R ) (a,b\in R) (a,b∈R)
其中 a a a 叫做实部, b b b 叫做虚部, i i i 为虚数单位。
所以有 − 7 = 7 i \sqrt{-7}=\sqrt7i −7=7i
类似平面直角坐标系,在复平面直角坐标系中,复数为其中的一个点。
如下图:
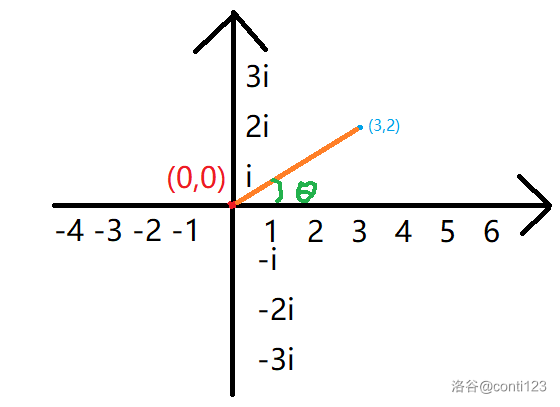
点(3,2)表示的复数为 3 + 2 i 3+2i 3+2i
它也可以表示为( 1 3 , θ \sqrt 13,\theta 13,θ)
定义:一个复数的模为它到原点的距离。
及复数 z = a + b i z=a+bi z=a+bi 的模记为 ∣ z ∣ = a 2 + b 2 |z|=\sqrt{a^2+b^2} ∣z∣=a2+b2
一个复数的共轭复数为其虚部取反。
及复数 z = a + b i z=a+bi z=a+bi 的共轭复数为 z ˉ = a − b i \bar{z}=a-bi zˉ=a−bi, z z ˉ = a 2 + b 2 z \bar{z} = a^2 +b^2 zzˉ=a2+b2
其实就跟共轭根式差不多。
复数的运算其实跟实数的运算差不多。
设 z 1 = a + b i z_1 = a + bi z1=a+bi, z 2 = c + d i z_2 = c + di z2=c+di
加减法:实部和虚部分别相加减:
z 1 ± z 2 = ( a ± c ) + ( b ± d ) i z_1 \pm z_2 = (a \pm c) + (b \pm d)i z1±z2=(a±c)+(b±d)i
乘法:硬算出奇迹(拆完后合并同类项)
z 1 z 2 = ( a c − b d ) + ( b c + a d ) i z_1z_2 = (ac - bd) + (bc + ad)i z1z2=(ac−bd)+(bc+ad)i
( a 1 , θ 1 ) ( a 2 , θ 2 ) = ( a 1 a 2 , θ 1 + θ 2 ) (a_1,\theta_1)(a_2,\theta_2)=(a_1a_2,\theta_1+\theta_2) (a1,θ1)(a2,θ2)=(a1a2,θ1+θ2)
除法:化简
z 1 z 2 = a + b i c + d i = ( a + b i ) ( c − d i ) ( c + d i ) ( c − d i ) = a c − b d i 2 + b c i − a d i c 2 − d 2 i 2 = ( a c + b d ) + ( b c − a d ) i c 2 + d 2 \dfrac{z_1}{z_2} = \dfrac{a+bi}{c+di}=\dfrac{(a+bi)(c-di)}{(c+di)(c-di)}=\dfrac{ac-bdi^2+bci-adi}{c^2-d^2i^2}=\dfrac{(ac+bd)+(bc-ad)i}{c^2+d^2} z2z1=c+dia+bi=(c+di)(c−di)(a+bi)(c−di)=c2−d2i2ac−bdi2+bci−adi=c2+d2(ac+bd)+(bc−ad)i
导数
和初中的 y = … y=\dots y=… 不一样,我们用 f ( x ) f(x) f(x) 来表示一个关于 x x x 的函数。
一般地,已知函数 y = f ( x ) y=f(x) y=f(x), x 0 , x 1 x_0,x_1 x0,x1 是其定义域内不同两点,记 Δ x = x 1 − x 0 , Δ y = y 1 − y 0 = f ( x 1 ) − f ( x 0 ) = f ( x 0 + Δ x ) − f ( x 0 ) \Delta x=x_1-x_0,\Delta y=y_1-y_0=f(x_1)-f(x_0)=f(x_0+\Delta x)-f(x_0) Δx=x1−x0,Δy=y1−y0=f(x1)−f(x0)=f(x0+Δx)−f(x0),则当 Δ x ≠ 0 \Delta x\neq 0 Δx=0 时,商 f ( x 0 + Δ x ) − f ( x 0 ) Δ x = Δ y Δ x \frac{f(x_0+\Delta x)-f(x_0)}{\Delta x}=\frac{\Delta y}{\Delta x} Δxf(x0+Δx)−f(x0)=ΔxΔy 称作函数 y = f ( x ) y=f(x) y=f(x)在区间 $[x_0,x_0 +_\Delta x] $ 上的平均变化率。
当 Δ x \Delta x Δx 趋近于 0 0 0 时,平均变化率 Δ y Δ x = f ( x 0 + Δ x ) − f ( x 0 ) Δ x \frac{\Delta y}{\Delta x}=\frac{f(x_0+\Delta x)-f(x_0)}{\Delta x} ΔxΔy=Δxf(x0+Δx)−f(x0) 趋近于一个常数 l l l,那么常数 l l l 称为函数 f ( x ) f(x) f(x) 在点 x 0 x_0 x0 的瞬时变化率。
趋近于可以用符号 → \to → 表示,所以上面那句话可以这样表示:
当 Δ x → 0 \Delta x \to 0 Δx→0 时, f ( x 0 + Δ x ) − f ( x 0 ) Δ x → l \frac{f(x_0+\Delta x)-f(x_0)}{\Delta x} \to l Δxf(x0+Δx)−f(x0)→l
或记作:
lim Δ x → 0 f ( x 0 + Δ x ) − f ( x 0 ) Δ x = l \lim_{\Delta x \to 0} \frac{f(x_0+\Delta x)-f(x_0)}{\Delta x}=l limΔx→0Δxf(x0+Δx)−f(x0)=l
函数在 x 0 x_0 x0 的瞬时变化率,通常称为 f ( x ) f(x) f(x) 在 x = x 0 x=x_0 x=x0 处的导数,并记作 f ′ ( x 0 ) f'(x_0) f′(x0)。
注意,是 f ′ f' f′。
那么对于函数 f ( x ) f(x) f(x) 怎么求导呢?
如下:
{ ( x a ) ′ = a x a − 1 ( c ) ′ = 0 ( e x ) ′ = e x ( ln x ) ′ = 1 x ( sin x ) ′ = cos x ( cos x ) ′ = sin x } \begin{Bmatrix} (x^a)'=ax^{a-1} \\ (c)'=0 \\ (e^x)'=e^x \\ (\ln x)'=\frac{1}{x} \\ (\sin x)'=\cos x \\ (\cos x)'=\sin x \end{Bmatrix} ⎩ ⎨ ⎧(xa)′=axa−1(c)′=0(ex)′=ex(lnx)′=x1(sinx)′=cosx(cosx)′=sinx⎭ ⎬ ⎫
例如 f ( x ) = x 2 f(x)=x^2 f(x)=x2,则 f ′ ( x ) = 2 x f'(x)=2x f′(x)=2x
最后再说一点 f ′ ( x ) f'(x) f′(x) 表示函数 f ( x ) f(x) f(x) 在 x x x 取值为几时切线的斜率。
泰勒公式及展开式
泰勒公式:
f ( x ) = f ( x 0 ) + f ′ ( x 0 ) ( x − x 0 ) + f ′ ′ ( x 0 ) 2 ! ( x − x 0 ) 2 + ⋯ + f ( n ) ( x 0 ) n ! ( x − x 0 ) n + R n + 1 ( x ) f(x)=f(x_0)+f'(x_0)(x-x_0)+\frac{f''(x_0)}{2!}(x-x_0)^2+\dotsb +\frac{f^{(n)}(x_0)}{n!}(x-x_0)^n+R_{n+1}(x) f(x)=f(x0)+f′(x0)(x−x0)+2!f′′(x0)(x−x0)2+⋯+n!f(n)(x0)(x−x0)n+Rn+1(x)
其中 R R R 为误差。
那么当 x 0 = 0 x_0=0 x0=0 时,得到麦克劳林公式:
f ( x ) = f ( 0 ) + f ′ ( 0 ) x + f ′ ′ ( 0 ) 2 ! x 2 + ⋯ + f ( n ) ( 0 ) n ! x n + R n + 1 ( x ) f(x)=f(0)+f'(0)x+\frac{f''(0)}{2!}x^2+\dotsb +\frac{f^{(n)}(0)}{n!}x^n+R_{n+1}(x) f(x)=f(0)+f′(0)x+2!f′′(0)x2+⋯+n!f(n)(0)xn+Rn+1(x)
所以我们就有了以下几个展开式:
{ e x = 1 + x + x 2 2 ! + x 3 3 ! + ⋯ + x n n ! + ⋯ ln ( 1 + x ) = x − x 2 2 + x 3 3 + ⋯ + ( − 1 ) n − 1 x n n + ⋯ sin x = ∑ k = 0 ∞ ( − 1 ) k x 2 k + 1 ( 2 k + 1 ) ! cos x = ∑ k = 0 ∞ ( − 1 ) k x 2 k ( 2 k ) ! } \begin{Bmatrix} e^x=1+x+\frac{x^2}{2!}+\frac{x^3}{3!}+\dotsb+\frac{x^n}{n!}+\dotsb \\ \ln(1+x)=x-\frac{x^2}{2}+\frac{x^3}{3}+\dotsb+(-1)^{n-1}\frac{x^n}{n}+\dotsb \\ \sin x=\sum_{k=0}^{\infty}(-1)^k\frac{x^{2k+1}}{(2k+1)!} \\ \cos x=\sum_{k=0}^{\infty}(-1)^k\frac{x^{2k}}{(2k)!} \end{Bmatrix} ⎩ ⎨ ⎧ex=1+x+2!x2+3!x3+⋯+n!xn+⋯ln(1+x)=x−2x2+3x3+⋯+(−1)n−1nxn+⋯sinx=∑k=0∞(−1)k(2k+1)!x2k+1cosx=∑k=0∞(−1)k(2k)!x2k⎭ ⎬ ⎫
欧拉公式
接上文,展开 e i x e^{ix} eix,得:
e i x = 1 + i x − x 2 2 ! − i x 3 3 ! + x 4 4 ! + i x 5 5 ! − x 6 6 ! − i x 7 7 ! + ⋯ ) e^{ix}=1+ix-\frac{x^2}{2!}-i\frac{x^3}{3!}+\frac{x^4}{4!}+i\frac{x^5}{5!}-\frac{x^6}{6!}-i\frac{x^7}{7!}+\dotsb) eix=1+ix−2!x2−i3!x3+4!x4+i5!x5−6!x6−i7!x7+⋯)
e i x = ( 1 − x 2 2 ! + x 4 4 ! − x 6 6 ! + ⋯ ) + i ( x − x 3 3 ! + x 5 5 ! − 7 3 7 ! + ⋯ ) e^{ix}=(1-\frac{x^2}{2!}+\frac{x^4}{4!}-\frac{x^6}{6!}+\dotsb) +i(x-\frac{x^3}{3!}+\frac{x^5}{5!}-\frac{7^3}{7!}+\dotsb) eix=(1−2!x2+4!x4−6!x6+⋯)+i(x−3!x3+5!x5−7!73+⋯)
e i x = cos x + i sin x e^{ix}=\cos x+i\sin x eix=cosx+isinx
将 x = π x=\pi x=π 带入:
e i π = cos π + i sin π = − 1 e^{i\pi}=\cos \pi + i\sin \pi=-1 eiπ=cosπ+isinπ=−1
所以欧拉恒等式出来:
e i π + 1 = 0 e^{i\pi}+1=0 eiπ+1=0
单位根
设 n n n 为正整数,若 x n = 1 x^n=1 xn=1 ,则 x x x 是 n n n 次单位根。
下文默认 n = 2 m , m n=2^m,m n=2m,m为正整数。
根据上文的欧拉公式,我们可知 e 2 k π i = cos 2 k π + i sin 2 k π = 1 e^{2k \pi i}=\cos 2k\pi+i\sin 2k\pi=1 e2kπi=cos2kπ+isin2kπ=1,故 n n n 次单位根分别是: e 2 k π i n = cos 2 k π n + i sin 2 k π n , ( k = 0 , 1 , 2 , … , n − 1 ) e^{\frac{2k\pi i}{n}}=\cos \frac{2k\pi}{n}+i\sin \frac{2k\pi}{n},(k=0,1,2,\dots,n-1) en2kπi=cosn2kπ+isinn2kπ,(k=0,1,2,…,n−1)。
接上文复数的知识,每个单位根在复平面上的坐标为 ( cos 2 k π n , sin 2 k π n ) (\cos \frac{2k\pi}{n},\sin \frac{2k\pi}{n}) (cosn2kπ,sinn2kπ)。
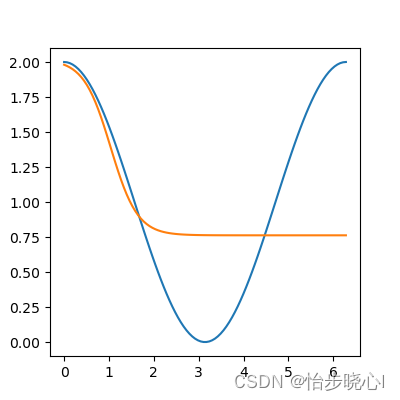
如图: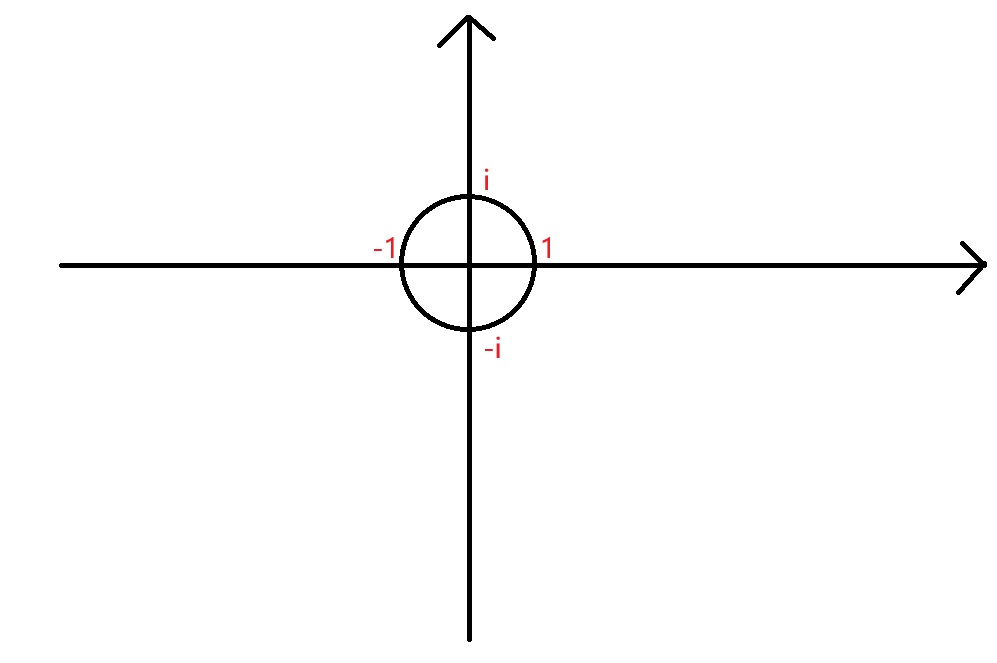
在一个标准复平面坐标系上,以 1 1 1 为半径画一个圆, n n n次单位根可以想象为把这个圆平分为 n n n 分中每一个点。
我们用 ω n 1 , ω n 2 , ω n 3 , … , ω n n \omega_n^1,\omega_n^2,\omega_n^3,\dots,\omega_n^n ωn1,ωn2,ωn3,…,ωnn 来表示 n n n 次单位根的每一个根,及方程的每一个解。
所以有 ω n k = cos k 2 π n + i sin k 2 π n \omega_n^k=\cos k\frac{2\pi}{n}+i\sin k\frac{2\pi}{n} ωnk=coskn2π+isinkn2π
如当 n = 4 n=4 n=4时, ω 4 = 1 , − 1 , i , − 1 \omega_4=1,-1,i,-1 ω4=1,−1,i,−1
如当 n = 1 n=1 n=1 时, ω 1 = 1 \omega_1=1 ω1=1
单位根的性质:
ω 2 n 2 k = ω n k = − ω n k + n 2 \omega_{2n}^{2k}=\omega_{n}^{k}=-\omega _n^{k+\frac{n}{2}} ω2n2k=ωnk=−ωnk+2n
ω n 0 = ω n n = 1 \omega_n^0=\omega_n^n=1 ωn0=ωnn=1
ω 2 n 2 k = cos 2 k 2 π 2 n + i sin 2 k 2 π 2 n = ω n k \omega_{2n}^{2k}=\cos 2k \frac{2\pi}{2n}+i\sin 2k \frac{2\pi}{2n}=\omega_n^k ω2n2k=cos2k2n2π+isin2k2n2π=ωnk
ω n n 2 = cos n 2 ⋅ 2 π n + i sin n 2 ⋅ 2 π n = cos π + i sin π = − 1 \omega_n^{\frac{n}{2}}=\cos \frac{n}{2}\cdot \frac{2\pi}{n}+i\sin \frac{n}{2}\cdot \frac{2\pi}{n}=\cos \pi+i\sin \pi=-1 ωn2n=cos2n⋅n2π+isin2n⋅n2π=cosπ+isinπ=−1
FFT
设 n n n 为偶数, k < n 2 k<\frac{n}{2} k<2n。
设
A ( x ) = a 0 + a 1 x + a 2 x 2 + a 3 x 3 + ⋯ + a n − 1 x n − 1 A(x)=a_{0}+a_{1}x+a_{2}x^2+a_{3}x^3+\dots+a_{n-1}x^{n-1} A(x)=a0+a1x+a2x2+a3x3+⋯+an−1xn−1
A 1 ( x ) = a 0 + a 2 x + a 4 x 2 + ⋯ + a n − 2 x n 2 − 1 A_1(x)=a_0+a_2x+a_4x^2+\cdots+a_{n-2}x^{\frac{n}{2}-1} A1(x)=a0+a2x+a4x2+⋯+an−2x2n−1
A 2 ( x ) = a 1 + a 3 x + a 5 x 2 + ⋯ + a n − 1 x n 2 − 1 A_2(x)=a_1+a_3x+a_5x^2+\cdots+a_{n-1}x^{\frac{n}{2}-1} A2(x)=a1+a3x+a5x2+⋯+an−1x2n−1
所以有:
A ( x ) = A 1 ( x 2 ) + x A 2 ( x 2 ) A(x)=A_1(x^2)+xA_2(x^2) A(x)=A1(x2)+xA2(x2)
A ( ω n k ) = A 1 ( ω n 2 k ) + ω n k A 2 ( ω n 2 k ) A(\omega_n^k)=A_1(\omega_n^{2k})+\omega_n^kA_2(\omega_n^{2k}) A(ωnk)=A1(ωn2k)+ωnkA2(ωn2k)
A ( ω n k + n 2 ) = A 1 ( ω n 2 k + n ) + ω n k + n 2 A 2 ( ω n 2 k + n ) = A 1 ( ω n 2 k ) − ω n k A 2 ( ω n 2 k ) A(\omega_n^{k+\frac{n}{2}})=A_1(\omega_n^{2k+n})+\omega_n^{k+\frac{n}{2}}A_2(\omega_n^{2k+n})=A_1(\omega_n^{2k})-\omega_n^kA_2(\omega_n^{2k}) A(ωnk+2n)=A1(ωn2k+n)+ωnk+2nA2(ωn2k+n)=A1(ωn2k)−ωnkA2(ωn2k)
发现了什么?没错,只有后面一坨是相反的,这说明我们可以 O ( 1 ) O(1) O(1) 通过第一个式子得出第二个式子
所以 k k k 只要枚举前 n 2 \frac{n}{2} 2n 个数就可以了,问题缩小了一半,而缩小后还能继续缩小,所以我们用类似线段树的分治(递归)来解决它,时间复杂度 O ( n log n ) O(n\log n) O(nlogn)
Code
void fft(int limit,complex *a,int type)
{if(limit==1) return ;complex a1[limit>>1],a2[limit>>1];for(int i=0;i<=limit;i+=2)a1[i>>1]=a[i],a2[i>>1]=a[i+1];fft(limit>>1,a1,type);fft(limit>>1,a2,type);complex Wn=complex(cos(2.0*Pi/limit),type*sin(2.0*Pi/limit)),w=complex(1,0);for(int i=0;i<(limit>>1);i++,w=w*Wn)a[i]=a1[i]+w*a2[i],a[i+(limit>>1)]=a1[i]-w*a2[i];
}
IFFT
但是光有点值还是不够的,我们还要转换为数值,这就是 IFFT。
至于还有一个迭代优化。
我们下篇博客再讲。
相关文章:
【算法】FFT-1(递归实现)(不包括IFFT)
FFT 多项式多项式乘法复数及运算导数泰勒公式及展开式欧拉公式单位根 FFTCode IFFT 多项式 我们从课本中可以知道,一个 n − 1 n-1 n−1 次的多项式可以写成 a 0 a 1 x a 2 x 2 a 3 x 3 ⋯ a n − 1 x n − 1 a_{0}a_{1}xa_{2}x^2a_{3}x^3\dotsa_{n-1}x^{n-…...

大模型训练效率提升至2.6倍,腾讯Angel机器学习框架升级
在算力紧缺的背景下,如何提升大模型训练和推理的效率,并降低成本,成为业界关注的焦点。 11月23日,腾讯披露,腾讯混元大模型背后的自研机器学习框架Angel再次升级,大模型训练效率提升至主流开源框架的2.6倍…...

【方块消消乐】方块消除游戏-微信小程序开发流程详解
有做过俄罗斯方块游戏小程序的经验,这次有做了一个消灭方块的游戏,实现过程很顺利,游戏看着和之前做的俄罗斯方块游戏很像,这里调整了玩法,试玩感觉还可以,接下来给大家讲一讲消灭方块游戏开发过程。 俄罗斯…...

mybatis配置文件中配置类型别名的方式
在MyBatis配置文件(通常是mybatis-config.xml)中,可以通过以下方式配置类型别名: 1. 使用typeAliases元素配置全局类型别名 <configuration> <typeAliases> <typeAlias alias"YourAlias" type"…...

leetcode目标和
给你一个非负整数数组 nums 和一个整数 target 。 向数组中的每个整数前添加 ‘’ 或 ‘-’ ,然后串联起所有整数,可以构造一个 表达式 : 例如,nums [2, 1] ,可以在 2 之前添加 ‘’ ,在 1 之前添加 ‘-…...
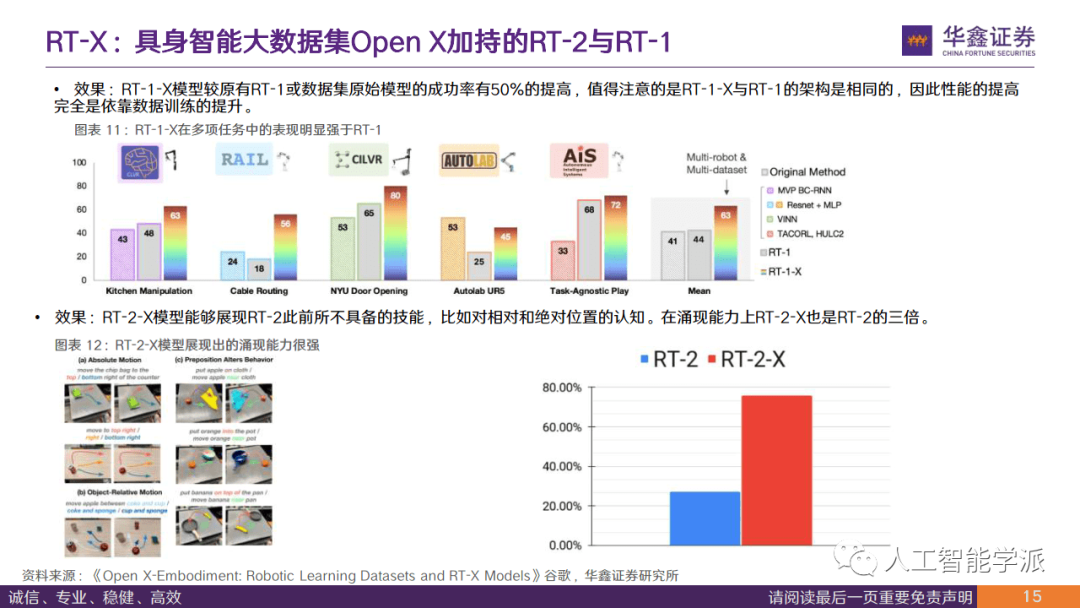
2023人形机器人行业海外科技研究:从谷歌看机器人大模型进展
今天分享的是人形机器人系列深度研究报告:《2023人形机器人行业海外科技研究:从谷歌看机器人大模型进展》。 (报告出品方:华鑫证券) 报告共计:26页 大模型是人形机器人的必备要素 长期来看,人…...

【深度学习笔记】01 数据操作与预处理
01 数据操作与预处理 一、数据操作1.1 基本数据操作1.2 广播机制1.3 索引和切片1.4 节省内存1.5 转换为其他Python对象 二、数据预处理读取数据集处理缺失值转换为张量格式练习 一、数据操作 1.1 基本数据操作 导入torch import torch张量表示一个由数值组成的数组ÿ…...

Python与设计模式--门面模式
8-Python与设计模式–门面模式 一、火警报警器(1) 假设有一组火警报警系统,由三个子元件构成:一个警报器,一个喷水器, 一个自动拨打电话的装置。其抽象如下: class AlarmSensor:def run(self):…...
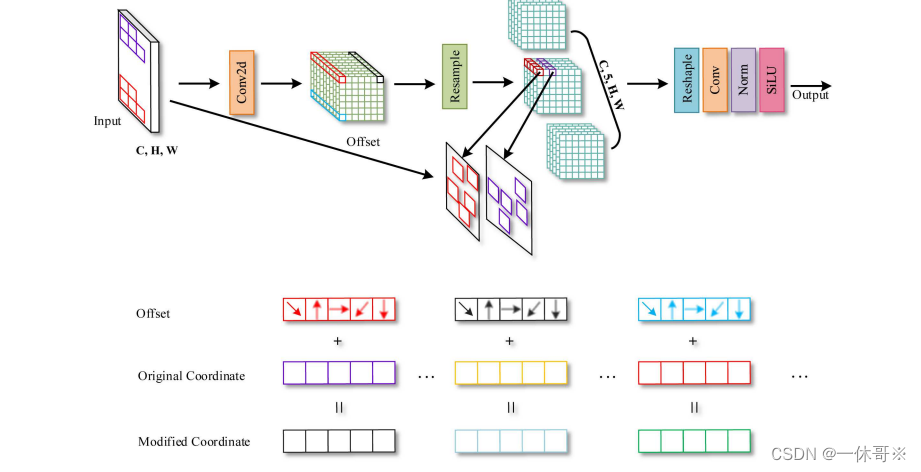
改进YOLOv8 | YOLOv5系列:RFAConv续作,即插即用具有任意采样形状和任意数目参数的卷积核AKCOnv
RFAConv续作,构建具有任意采样形状的卷积AKConv 一、论文yolov5加入的方式论文 源代码 一、论文 基于卷积运算的神经网络在深度学习领域取得了显著的成果,但标准卷积运算存在两个固有缺陷:一方面,卷积运算被限制在一个局部窗口,不能从其他位置捕获信息,并且其采样形状是…...
机器学习-激活函数的直观理解
机器学习-激活函数的直观理解 在机器学习中,激活函数(Activation Function)是用于引入非线性特性的一种函数,它在神经网络的每个神经元上被应用。 如果不使用任何的激活函数,那么神经元的响应就是wxb,相当…...
Fedora 36 ARM 镜像源更换与软件安装
1、什么是Fedora Fedora Linux是较具知名度的Linux发行套件之一,由Fedora专案社群开发、红帽公司赞助,目标是建立一套新颖、多功能并且自由的作业系统。 Fedora是商业化的Red Hat Enterprise Linux发行版的上游原始码。 2、Fedora软件安装 64 位 .deb&a…...
多级缓存快速上手
哈喽~大家好,这篇来看看多级缓存。 🥇个人主页:个人主页 🥈 系列专栏:【微服务】 🥉与这篇相关的文章: JAVA进程和线程JAVA进程和线程-CSDN博客Http…...

初始React
<!DOCTYPE html> <html> <head> <meta charset"UTF-8" /> <title>React</title> </head> <body> 了解React <!-- React是一个用于构建web和原生态交互界面的库 相对于传统DOM开发优势:组件化开发…...

2.5 逆矩阵
一、逆矩阵的注释 假设 A A A 是一个方阵,其逆矩阵 A − 1 A^{-1} A−1 与它的大小相同, A − 1 A I A^{-1}AI A−1AI。 A A A 与 A − 1 A^{-1} A−1 会做相反的事情。它们的乘积是单位矩阵 —— 对向量无影响,所以 A − 1 A x x A^{…...
物流实时数仓:数仓搭建(ODS)
系列文章目录 物流实时数仓:采集通道搭建 物流实时数仓:数仓搭建 文章目录 系列文章目录前言一、IDEA环境准备1.pom.xml2.目录创建 二、代码编写1.log4j.properties2.CreateEnvUtil.java3.KafkaUtil.java4.OdsApp.java 三、代码测试总结 前言 现在我们…...

【ARM 嵌入式 编译 Makefile 系列 18 -- Makefile 中的 export 命令详细介绍】
文章目录 Makefile 中的 export 命令详细介绍Makefile 使用 export导出与未导出变量的区别示例:导出变量以供子 Makefile 使用 Makefile 中的 export 命令详细介绍 在 Makefile 中,export 命令用于将变量从 Makefile 导出到由 Makefile 启动的子进程的环…...

【opencv】计算机视觉:停车场车位实时识别
目录 目标 整体流程 背景 详细讲解 目标 我们想要在一个实时的停车场监控视频中,看看要有多少个车以及有多少个空缺车位。然后我们可以标记空的,然后来车之后,实时告诉应该停在那里最方便、最近!!!实现…...
:FFmpeg与SDL环境配置)
播放器开发(三):FFmpeg与SDL环境配置
学习课题:逐步构建开发播放器【QT5 FFmpeg6 SDL2】 环境配置 我这边的是使用macOS;IDE用的是CLion;CMake构建,除了创建项目步骤、CMakeLists文件有区别之外的代码层面不会有太大区别。 配置上只添加一下CMakeLists中FFmpeg和SD…...
KubeVela核心控制器原理浅析
前言 在学习 KubeVela 的核心控制器之前,我们先简单了解一下 KubeVela 的相关知识。 KubeVela 本身是一个应用交付与管理控制平面,它架在 Kubernetes 集群、云平台等基础设施之上,通过开放应用模型来对组件、云服务、运维能力、交付工作流进…...

迎接“全全闪”时代 XSKY星辰天合发布星海架构和星飞产品
11 月 17 日消息,北京市星辰天合科技股份有限公司(简称:XSKY星辰天合)在北京首钢园举办了主题为“星星之火”的 XSKY 星海全闪架构暨星飞存储发布会。 (图注:XSKY星辰天合 CEO 胥昕) XSKY星辰天…...

Lumafly:空洞骑士模组管理器的完整使用指南与技巧分享
Lumafly:空洞骑士模组管理器的完整使用指南与技巧分享 【免费下载链接】Lumafly A cross platform mod manager for Hollow Knight written in Avalonia. 项目地址: https://gitcode.com/gh_mirrors/lu/Lumafly Lumafly是一款专为《空洞骑士》玩家设计的跨平…...

BackgroundRemover:基于U-2-Net的智能背景移除工具完全指南
BackgroundRemover:基于U-2-Net的智能背景移除工具完全指南 【免费下载链接】backgroundremover Background Remover lets you Remove Background from images and video using AI with a simple command line interface that is free and open source. 项目地址:…...

前端团队协作:别让沟通成本拖垮你的项目
前端团队协作:别让沟通成本拖垮你的项目 什么是前端团队协作? 前端团队协作是指前端开发团队成员之间的协调与配合,包括代码管理、任务分配、沟通交流等方面。别以为前端开发只是写代码,团队协作不好,项目就会变成一场…...
)
实战分享:如何用YOLOv5+SpringBoot打造化工安全火苗检测系统(附完整代码)
工业级AI实战:YOLOv5与SpringBoot构建智能火情预警系统 化工行业对安全生产的严苛要求,使得传统人工监控方式面临巨大挑战。我们团队在多个工业场景中验证了一套基于YOLOv5与SpringBoot的智能火情检测方案,其核心在于将前沿目标检测技术与企业…...

Ubuntu系统下SocketCAN实战:免驱配置PCAN/PCAN FD设备全流程
1. 认识SocketCAN与PCAN设备 在嵌入式开发和汽车电子领域,CAN总线就像设备之间的"神经传导系统",而SocketCAN则是Linux内核为这个系统提供的"标准语言接口"。我第一次接触PCAN设备时,发现它有个巨大优势——大多数型号在…...

具身智能科技行业前瞻探索——多任务操作、第一人称世界模型、低光照与模糊感知 国泰证券 2026-4
这份国泰海通证券 2026 年 4 月发布的具身智能科技前瞻探索(第 3 期),核心是梳理 6 项前沿技术成果,聚焦人形机器人与具身智能的多任务、感知、仿真、控制、多模态五大突破,明确学术价值与产业落地方向。一、核心背景人…...
的测量与优化实战指南)
【无线通信】邻道功率比(ACPR)的测量与优化实战指南
1. 邻道功率比(ACPR)到底是什么? 第一次听说ACPR这个术语时,我也是一头雾水。直到有次在现场调试5G基站,发现隔壁频段的设备总是莫名其妙掉线,才真正理解它的重要性。简单来说,**邻道功率比&…...

hive strict 严格模式
Hive的严格模式(Strict Mode)是一道经典的面试题。它的核心是一个安全防护机制,通过限制执行高风险的查询,来防止单个“烂SQL”拖垮整个集群。 🔒 严格模式禁止的三大类查询 在 hive.mapred.modestrict 模式下&#…...

VBA-JSON终极指南:在Excel中轻松处理JSON数据的完整教程
VBA-JSON终极指南:在Excel中轻松处理JSON数据的完整教程 【免费下载链接】VBA-JSON JSON conversion and parsing for VBA 项目地址: https://gitcode.com/gh_mirrors/vb/VBA-JSON 你是否经常需要在Excel中处理来自API的JSON数据?或者需要将Excel…...

Klib入门指南:5分钟掌握C语言高性能通用库
Klib入门指南:5分钟掌握C语言高性能通用库 【免费下载链接】klib A standalone and lightweight C library 项目地址: https://gitcode.com/gh_mirrors/kl/klib Klib是一款轻量级且独立的C语言通用库,以其高效的性能和简洁的设计深受开发者喜爱。…...