ROS gazebo 机器人仿真,环境与robot建模,添加相机 lidar,控制robot运动
b站上有一个非常好的ros教程234仿真之URDF_link标签简介-机器人系统仿真_哔哩哔哩_bilibili,推荐去看原视频。
视频教程的相关文档见:6.7.1 机器人运动控制以及里程计信息显示 · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
本文对视频教程第六章的主要内容做一个总结,视频教程没有集成的代码,都是每一课分散的代码,本文把主要代码集合进来,给嫌视频太长不想看的同学做一个总结。教程视频中使用的是rplidar,那个很不好用,也不接近现实。本文改用Velodyne的lidar,相对更好用一些。Velodyne源代码在github。
本文主要包括以下内容:
gazebo仿真世界的构建,mobile robot的构建,RGB相机和雷达这两个传感器的构建,如何获取传感器的数据并在rviz中显示,以及robot的控制器。
下载资源,可以得到如下的
文件结构
工作空间文件夹:ros_robot_navi,工作空间文件夹下:
src中包含两个功能包:

velodyne_descreption是github上下载的lidar仿真模块。
进入 robot_sim中,有如下结构

urdf中放的是robot lidar camera等模型文件,worlds中放的是gazebo模拟世界的环境,launch中就是launch文件了。
robot建模
在urdf/gazebo/中,放的是各类模型。

以my_base.xacro文件为例,这个是robot的底座
<link name="base_footprint"><visual><geometry><sphere radius="${base_footprint_radius}" /></geometry></visual></link>link标签就是机器人的各个部件,各个部件之间,通过joint标签相连接
<joint name="base_link2base_footprint" type="fixed"><parent link="base_footprint" /><child link="base_link" /><origin xyz="0 0 ${earth_space + base_link_length / 2 }" /></joint>collision和initial属性是gazebo仿真必须的属性。进行刚体力学 运动学计算和碰撞计算。
my_car.xacro将各个部分拼装在一起。move是小车运动控制器。
<!-- 组合小车底盘与摄像头 -->
<robot name="my_car" xmlns:xacro="http://wiki.ros.org/xacro"><xacro:include filename="my_head.xacro" /><xacro:include filename="my_base.xacro" /><xacro:include filename="my_camera.xacro" /><xacro:include filename="my_laser.xacro" /><xacro:include filename="move.xacro" /><xacro:include filename="$(find velodyne_description)/urdf/VLP-16.urdf.xacro"/><xacro:VLP-16 parent="support" name="velodyne" topic="/velodyne_points" hz="10" samples="440" gpu="false"><origin xyz="0 0 0.4" rpy="0 0 0" /></xacro:VLP-16>
</robot>
在集成lidar时,parent是提前建好的joint中的父节点。通过parent这个参数,就可以建立lidar模块和小车底座模块的联系。
launch
在robot_sim功能包的launch文件夹中,car_env_gazebo.launch
<launch><!--launch urdf content to param server--><param name="robot_description" command="$(find xacro)/xacro $(find robot_sim)/urdf/gazebo/my_car.xacro" /><!-- launch gazebo --><include file="$(find gazebo_ros)/launch/empty_world.launch"><arg name="world_name" value="$(find robot_sim)/worlds/box_house.world" /></include><!-- display robot in gazebo--><node pkg="gazebo_ros" type="spawn_model" name="model" args="-urdf -model mycar -param robot_description" />
</launch>command命令是为了将.xacro转为.urdf。也可以通过以下命令单独进行转化:
进入要转化的.xacro文件夹
rosrun xacro xacro xxx.xacro > xxx.urdf把转化集成进.launch中的好处是改了模型以后不用单独转化,直接运行。坏处是,如果模型有问题,不知道哪里报错。如果在gazebo中没有正确显示出模型,那么再单独运行这个转化命令,看看是模型哪里写错了。
运行这个.launch文件
roslaunch robot_sim car_env_gazebo.launch就可以在gazebo中看到小车和雷达了

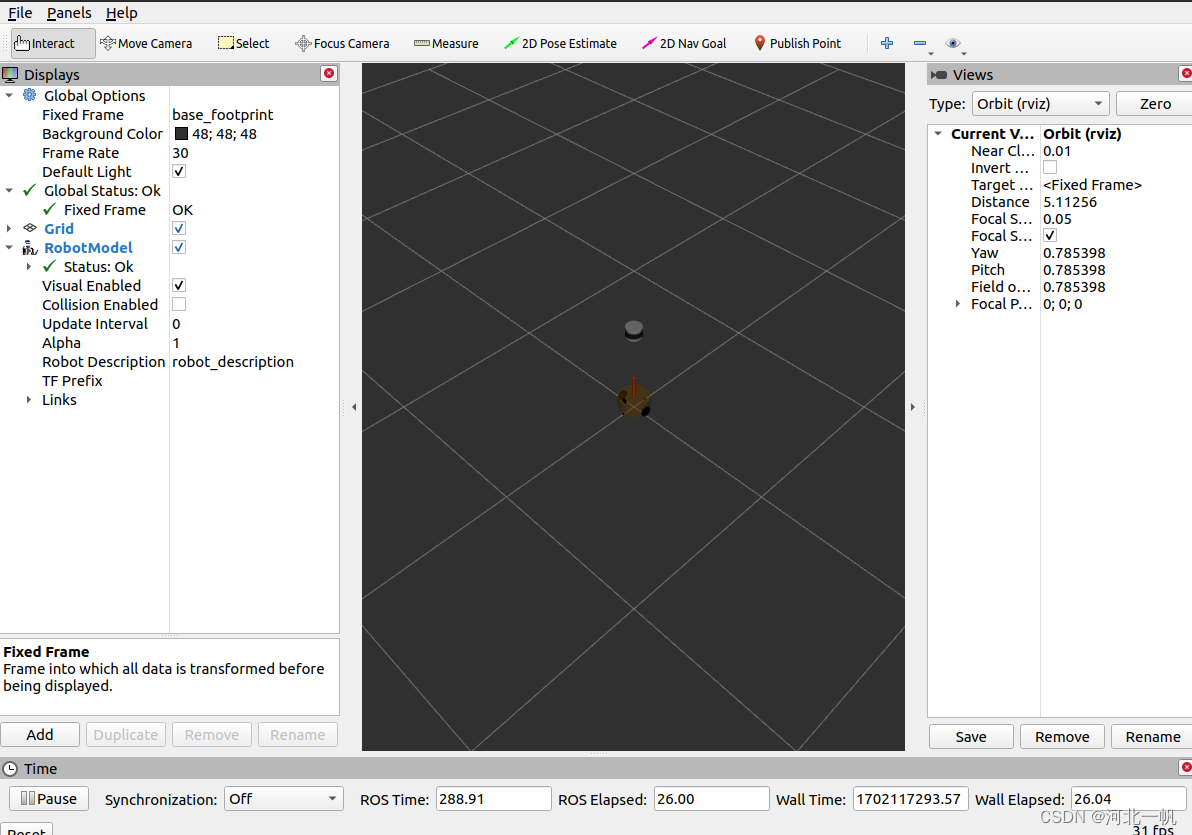
再运行 my_car_rviz.launch
<launch><param name="robot_description" command="$(find xacro)/xacro $(find robot_sim)/urdf/gazebo/my_car.xacro" /><node pkg="rviz" type="rviz" name="rviz" /><node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" output="screen" /><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen" /><node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" output="screen" /></launch>
就可以在rviz中看到lidar的点云和相机的图片了


小车也可以加进来
运动控制
再打开一个终端,source一下,运行
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'
控制小车运动。
launch文件说明
<launch><!-- 启动节点 --><node pkg="your_package_name" type="your_node_executable" name="your_node_name" />
</launch>
相关文章:
ROS gazebo 机器人仿真,环境与robot建模,添加相机 lidar,控制robot运动
b站上有一个非常好的ros教程234仿真之URDF_link标签简介-机器人系统仿真_哔哩哔哩_bilibili,推荐去看原视频。 视频教程的相关文档见:6.7.1 机器人运动控制以及里程计信息显示 Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程 本文对视频教程…...
人体关键点检测3:Android实现人体关键点检测(人体姿势估计)含源码 可实时检测
目录 1. 前言 2.人体关键点检测方法 (1)Top-Down(自上而下)方法 (2)Bottom-Up(自下而上)方法: 3.人体关键点检测模型训练 4.人体关键点检测模型Android部署 (1) 将Pytorch模型转换ONNX模型 (2) 将ONNX模型转换…...

踩坑记录:uniapp中scroll-view的scroll-top不生效问题;
情景描述: 最近在uniapp项目中用到scroll-view内置组件,有需求是在页面下拉刷新后,让scroll-view组件区域的显示内容置顶,也就是scroll-view区域的内容恢复不滑动的状态; 补充:下拉刷新操作scroll-view组件…...

YOLOX 学习笔记
文章目录 前言一、YOLOX贡献和改进二、YOLOX架构改进总结 前言 在计算机视觉领域,实时对象检测技术一直是一个热门的研究话题。YOLO(You Only Look Once)系列作为其中的佼佼者,以其高效的检测速度和准确性,广泛应用于…...

第3节:Vue3 v-bind指令
实例: <template><div><button v-bind:disabled"isButtonDisabled">点击我</button></div> </template><script> import { ref } from vue;export default {setup() {const isButtonDisabled ref(false);ret…...

Token 和 N-Gram、Bag-of-Words 模型释义
ChatGPT(GPT-3.5)和其他大型语言模型(Pi、Claude、Bard 等)凭何火爆全球?这些语言模型的运作原理是什么?为什么它们在所训练的任务上表现如此出色? 虽然没有人可以给出完整的答案,但…...

【go语言实践】基础篇 - 流程控制
if语句 go里面if不需要括号将条件表达式包含起来,这与python也有点类似 if 条件表达式 { } if num > 18 {// ... } else if num > 20 {// ... } else {// ... }需要注意的是go支持在if的条件表达式中直接定义一个变量,变量的作用域只在if范围内…...
Linux:gdb的简单使用
个人主页 : 个人主页 个人专栏 : 《数据结构》 《C语言》《C》《Linux》 文章目录 前言一、前置理解二、使用总结 前言 gdb是Linux中的调试代码的工具 一、前置理解 我们都知道要调试一份代码,这份代码的发布模式必须是debug。那你知道在li…...

NestJS的微服务实现
1.1 基本概念 微服务基本概念:微服务就是将一个项目拆分成多个服务。举个简单的例子:将网站的登录功能可以拆分出来做成一个服务。 微服务分为提供者和消费者,如上“登录服务”就是一个服务提供者,“网站服务器”就是一个服务消…...

Debian 终端Shell命令行长路径改为短路径
需要修改bashrc ~/.bashrc先备份一份 cp .bashrc bashrc.backup编辑bashrc vim ~/.bashrc可以看到bashrc内容为 # ~/.bashrc: executed by bash(1) for non-login shells. # see /usr/share/doc/bash/examples/startup-files (in the package bash-doc) # for examples# If…...

Ansible变量是什么?如何实现任务的循环?
Ansible 利用变量存储整个 Ansible 项目文件中可重复使用的值,从而可以简化项目的创建和维护,并减少错误的发生率。在定义Ansible变量时,通常有如下三种范围的变量: global范围:从命令行或Ansible配置中设置的变量&am…...

随机梯度下降的代码实现
在单变量线性回归的机器学习代码中,我们讨论了批量梯度下降代码的实现,本篇将进行随机梯度下降的代码实现,整体和批量梯度下降代码类似,仅梯度下降部分不同: import numpy as np import pandas as pd import matplotl…...
渐进推导中常用的一些结论
标题很帅 STAR-RIS Enhanced Joint Physical Layer Security and Covert Communications for Multi-antenna mmWave Systems文章末尾的一个推导。 lim M → ∞ ∥ Φ ( w k ⊗ Θ r ) Ω r w H g ∗ ∥ 2 2 M lim M → ∞ Tr ( g T Ω r w ( w k ⊗ Θ r ) H Φ H Φ…...
网络安全等级保护V2.0测评指标
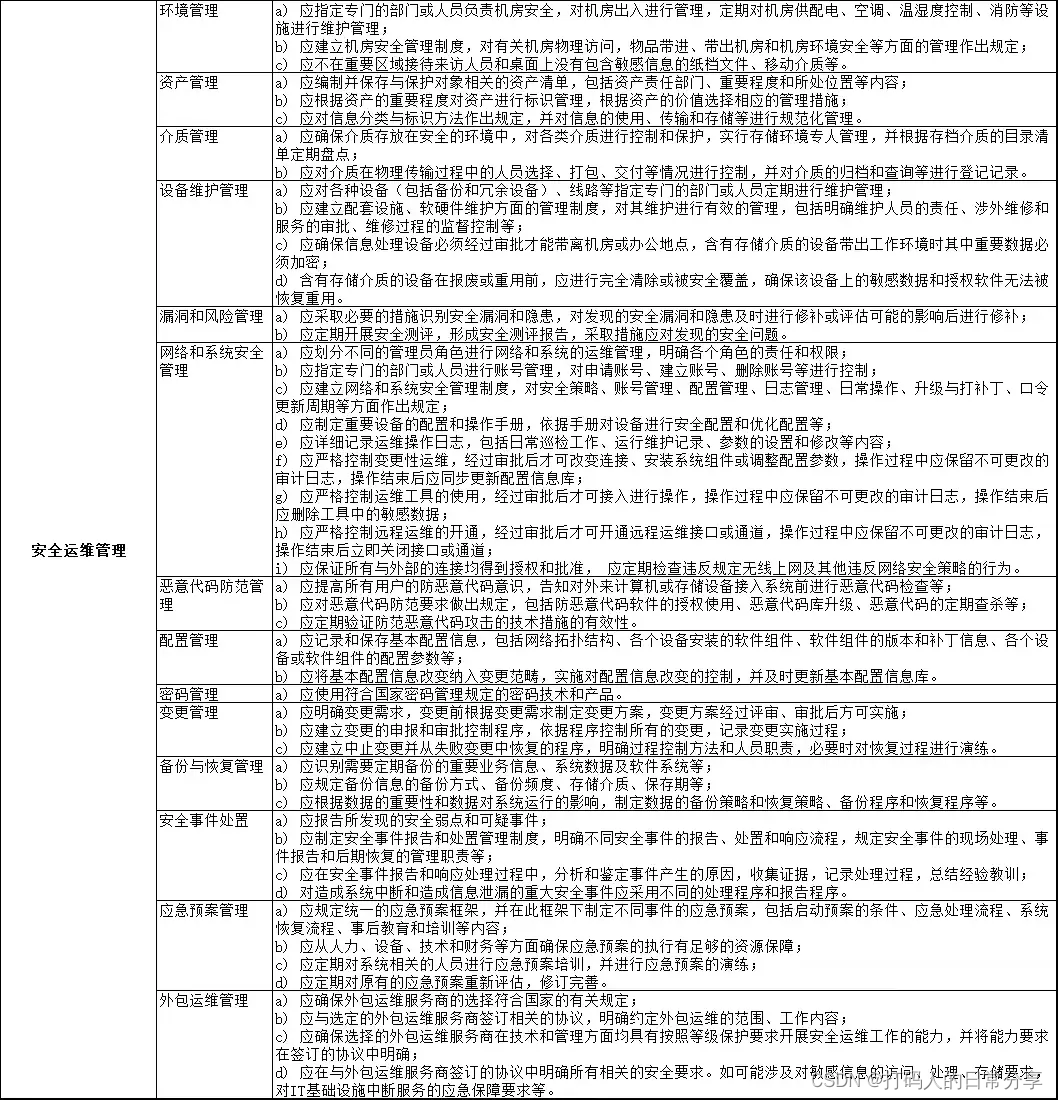
网络安全等级保护(等保V2.0)测评指标: 1、物理和环境安全 2、网络和通信安全 3、设备和计算安全 4、应用和数据安全 5、安全策略和管理制度 6、安全管理机构和人员 7、安全建设管理 8、安全运维管理 软件全文档获取:点我获取 1、物…...

java中list的addAll用法详细实例?
List 的 addAll() 方法用于将一个集合中的所有元素添加到另一个 List 中。下面是一个详细的实例,展示了 addAll() 方法的使用: java Copy code import java.util.ArrayList; import java.util.List; public class AddAllExample { public static v…...

关于学习计算机的心得与体会
也是隔了一周没有发文了,最近一直在准备期末考试,后来想了很久,学了这么久的计算机,这当中有些收获和失去想和各位正在和我一样在学习计算机的路上的老铁分享一下,希望可以作为你们碰到困难时的良药。先叠个甲…...
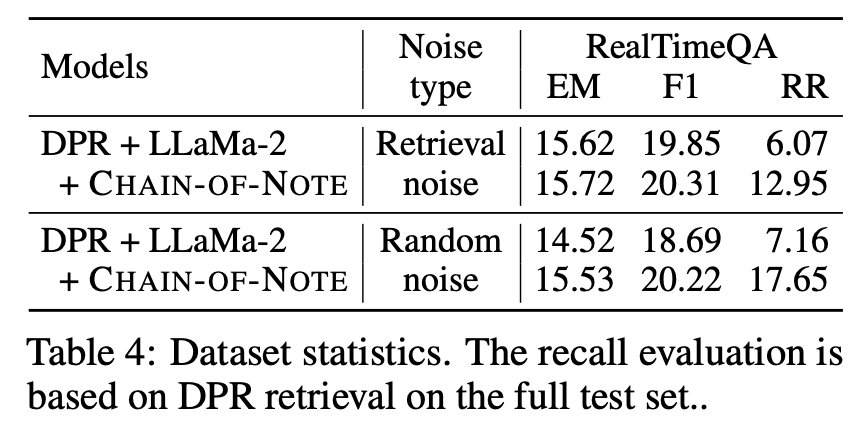
LLM之RAG理论(一)| CoN:腾讯提出笔记链(CHAIN-OF-NOTE)来提高检索增强模型(RAG)的透明度
论文地址:https://arxiv.org/pdf/2311.09210.pdf 检索增强语言模型(RALM)已成为自然语言处理中一种强大的新范式。通过将大型预训练语言模型与外部知识检索相结合,RALM可以减少事实错误和幻觉,同时注入最新知识。然而&…...

Android studio:打开应用程序闪退的问题2.0
目录 找到问题分析问题解决办法 找到问题 老生常谈,可能这东西真的很常见吧,在之前那篇文章中 linkhttp://t.csdnimg.cn/UJQNb 已经谈到了关于打开Androidstuidio开发的软件后明明没有报错却无法运行(具体表现为应用程序闪退的问题ÿ…...

Spring IoC如何存取Bean对象
小王学习录 IoC(Inversion of Control)1. 什么是IoC2. 什么是Spring IoC3. 什么是DI4. Spring IoC的作用 存储Bean对象1. 创建Bean2. 将Bean注册到Spring中. 取Bean对象.1. 获取Spring上下文信息使用ApplicationContext和BeanFactory的区别 2. 获取指定Bean对象 IoC(Inversion …...

【开源】基于Vue.js的实验室耗材管理系统
文末获取源码,项目编号: S 081 。 \color{red}{文末获取源码,项目编号:S081。} 文末获取源码,项目编号:S081。 目录 一、摘要1.1 项目介绍1.2 项目录屏 二、功能模块2.1 耗材档案模块2.2 耗材入库模块2.3 耗…...

Sora之后的真相:2026年真正落地的8款工业级AI视频引擎,含API吞吐量、帧间PSNR均值与商用SLA承诺明细
更多请点击: https://intelliparadigm.com 第一章:Sora之后的真相:2026年真正落地的8款工业级AI视频引擎,含API吞吐量、帧间PSNR均值与商用SLA承诺明细 Sora发布两年后,工业界已摒弃“演示即产品”的幻觉。截至2026年…...

开发AI应用时如何利用Taotoken实现模型的快速选型与A/B测试
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 开发AI应用时如何利用Taotoken实现模型的快速选型与A/B测试 在开发AI应用的过程中,选择合适的模型是影响最终效果与成本…...
)
告别编译报错!手把手教你为最新版Keil MDK安装ARM Compiler 5(保姆级图文)
嵌入式开发者的救星:彻底解决Keil MDK缺失ARM Compiler 5的终极方案 当你满怀信心地打开一个历史遗留的嵌入式项目,准备进行功能迭代时,Keil MDK突然弹出一个冰冷的错误窗口:"Error: Compiler V5.06 update 7 (build 960) no…...

别光顾着写EXP:复盘BUUCTF warmup_csaw_2016,聊聊PWN题里的‘信息泄露’与安全编程
从CTF漏洞利用到安全编程:深入解析信息泄露与防御实践 引言 在网络安全竞赛和实际系统安全中,信息泄露往往成为攻击者突破防御的第一块敲门砖。2016年CSAW CTF的warmup题目虽然看似简单,却完美展示了这类漏洞的典型模式——程序不仅存在栈溢出…...
ESP32 阿里云身份认证 超简版教程)
硬件入门 + 单片机基础(第16天)ESP32 阿里云身份认证 超简版教程
一、准备工作阿里云物联网平台创建产品 设备,拿到三元组ProductKeyDeviceNameDeviceSecretArduino 安装库:AliyunIoTSDK(阿里云官方 MQTT)WiFiPubSubClient二、直接可用代码(只需要改 4 处信息)#include &…...

汇编新手避坑指南:搞懂AX、BX、CX、DX这些“双面”寄存器,才算入门
汇编新手避坑指南:搞懂AX、BX、CX、DX这些“双面”寄存器,才算入门 第一次接触汇编语言时,那些神秘的寄存器名称总让人望而生畏。尤其是AX、BX、CX、DX这几个"双面人",一会儿能拆成AH和AL,一会儿又能合体使用…...

iOS 27 Siri 自动删除聊天记录:深度解析与行业启示
上周同事跟我吐槽,说他跟Siri聊了点私事,换手机时发现聊天记录全在iCloud里躺着。我跟他说,等iOS 27吧,Siri终于要加自动删除功能了。这个功能不算革命性创新,但方向是对的。下面从用户价值、技术实现和行业影响三个维…...

稳定币深度解析:从技术内核到生态未来
稳定币深度解析:从技术内核到生态未来 引言 在加密货币世界剧烈波动的浪潮中,稳定币如同一座坚不可摧的桥梁,连接着传统金融与去中心化未来。它不仅是DeFi乐高积木中最关键的基座,更在跨境支付、元宇宙经济等前沿领域扮演着核心…...

GLAD:热晕效应
概述激光在大气中传输时部分能量被空气中的分子和气溶胶吸收。被吸收的热量将空气加热,导致气压上升,空气膨胀,空气密度降低,折射率下降,形成一个负透镜,使激光束发散。当存在侧向风时,下风区空…...

Linux 绝对路径与相对路径详解——新手再也不迷路
前言在Linux中,无论是查看文件、修改配置,还是切换目录,都离不开“路径”——路径就像是文件和目录的“地址”,指引我们在庞大的文件系统中找到目标。对于新手来说,最容易混淆的就是“绝对路径”和“相对路径”&#x…...