python数字图像处理基础(九)——特征匹配
目录
- 蛮力匹配(ORB匹配)
- RANSAC算法
- 全景图像拼接
蛮力匹配(ORB匹配)
Brute-Force匹配非常简单,首先在第一幅图像中选取一个关键点然后依次与第二幅图像的每个关键点进行(描述符)距离测试,最后返回距离最近的关键点.
对于BF匹配器,首先我们必须使用**cv2.BFMatcher()**创建 BFMatcher 对象。它需要两个可选的参数:
- normType:它指定要使用的距离测量,默认情况下,它是cv2.NORM_L2,它适用于SIFT,SURF等(cv2.NORM_L1也在那里)。对于基于二进制字符串的描述符,如ORB,BRIEF,BRISK等,应使用cv2.NORM_HAMMING,使用汉明距离作为度量,如果ORB使用WTA_K == 3or4,则应使用cv2.NORM_HAMMING2。
- crossCheck:默认值为
False。如果设置为True,匹配条件就会更加严格,只有到A中的第i个特征点与B中的第j个特征点距离最近,并且B中的第j个特征点到A中的第i个特征点也是最近时才会返回最佳匹配,即这两个特征点要互相匹配才行
两个重要的方法是BFMatcher.match()和BFMatcher.knnMatch(), 第一个返回最佳匹配, 第二种方法返回k个最佳匹配,其中k由用户指定.
使用cv2.drawMatches()来绘制匹配的点,它会将两幅图像先水平排列,然后在最佳匹配的点之间绘制直线。如果前面使用的BFMatcher.knnMatch(),现在可以使用函数cv2.drawMatchsKnn为每个关键点和它的个最佳匹配点绘制匹配线。如果要选择性绘制就要给函数传入一个掩模.
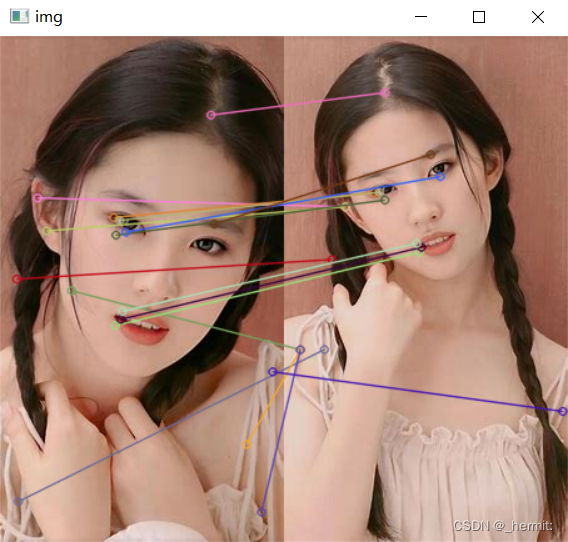
一对一匹配 BFMatcher.match()
import numpy as np
import cv2
from matplotlib import pyplot as pltimg1 = cv2.imread('./image/girl1.jpg')
img2 = cv2.imread('./image/girl2.jpg')sift = cv2.SIFT_create()# kp代表特征点 des每个点对应特征向量
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None)bf = cv2.BFMatcher(crossCheck=True) # 可选对象crossCheck# 1对1匹配
matches = bf.match(des1, des2)
matches = sorted(matches, key=lambda x: x.distance) # 排序,通过距离来度量img3 = cv2.drawMatches(img1, kp1, img2, kp2, matches[:30], None, flags=2) # matches[:10] 距离前十的给显示出来,即显示十条匹配线cv2.imshow('img', img3)
cv2.waitKey(0)
cv2.destroyAllWindows()

k对最佳匹配 BFMatcher.knnMatch()
import numpy as np
import cv2
from matplotlib import pyplot as pltimg1 = cv2.imread('./image/girl1.jpg')
img2 = cv2.imread('./image/girl2.jpg')sift = cv2.SIFT_create()# kp代表特征点 des每个点对应特征向量
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None)# k对最佳匹配
bf = cv2.BFMatcher()
matches = bf.knnMatch(des1, des2, k=2)good = []
for m, n in matches:# 过滤方法if m.distance < 0.75 * n.distance:good.append([m])img3 = cv2.drawMatchesKnn(img1, kp1, img2, kp2, good, None, flags=2)cv2.imshow('img', img3)
cv2.waitKey(0)
cv2.destroyAllWindows()
RANSAC算法
蛮力匹配是一种简单而直观的匹配方法,适用于小规模的特征点匹配。通过比较所有可能的特征点对,找到最佳匹配。而RANSAC算法则通过随机采样和一致性检验,从包含噪声的数据中估计出正确的模型参数,对于一些存在噪声和异常值的情况,RANSAC能够更稳健地估计模型。
利用RANSAC算法计算变换矩阵
RANSAC是"RANdom SAmple Consensus"(随机一致采样)的缩写。该方法是用来找到正确模型来拟合带有噪声数据的迭代方法。给定一个模型,例如点集之间的单应性矩阵。基本的思想是:数据中包含正确的点和噪声点,合理的模型应该能够在描述正确数据点的同时摒弃噪声点。
此外还有ORB匹配、SIFT的特征匹配、基于FLANN的匹配器的匹配,等等
全景图像拼接
全景图像拼接是将多张图像拼接成一张全景图的任务。在这个过程中,特征点匹配和单应性矩阵估计是关键的步骤。你提到的使用SIFT找到特征点,并通过单应性矩阵将图像进行变换,是一种常见的方法。这样可以在不同视角或位置拍摄的图像中找到对应的特征点,从而实现拼接。
通过SIFT找特征点
关于单应性矩阵(H矩阵):
利用两个图像中至少四个特征点能够求解一个单应性矩阵(homography matrix),然后用这个单应性矩阵能够将图像1中的某个坐标变换到图像2中对应的位置。然而,矩阵的推导是来自于相机在不同位姿拍摄同一个三维平面,所以使用opencv计算单应性矩阵的时候前提是两个图像对应区域必须是同一平面。
当进行全景图像拼接时,常常需要使用RANSAC算法估计单应性矩阵。下面是一个简单的示例代码,其中包括特征点匹配、RANSAC算法和全景图像拼接的步骤。
import cv2
import numpy as npdef find_keypoints_and_descriptors(image):# 使用SIFT算法找到图像的关键点和描述符sift = cv2.SIFT_create()kp, des = sift.detectAndCompute(image, None)return kp, desdef match_keypoints(des1, des2):# 使用BFMatcher进行特征点匹配bf = cv2.BFMatcher()matches = bf.knnMatch(des1, des2, k=2)# 使用比值测试排除不好的匹配good = []for m, n in matches:if m.distance < 0.75 * n.distance:good.append(m)return gooddef ransac_homography(matches, kp1, kp2, reproj_thresh=4.0):# 将匹配的关键点转换为numpy数组src_pts = np.float32([kp1[m.queryIdx].pt for m in matches]).reshape(-1, 1, 2)dst_pts = np.float32([kp2[m.trainIdx].pt for m in matches]).reshape(-1, 1, 2)# 使用RANSAC算法估计单应性矩阵H, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, reproj_thresh)return Hdef stitch_images(image1, image2, H):# 将图像1进行透视变换,将其叠加到图像2上rows1, cols1 = image1.shape[:2]rows2, cols2 = image2.shape[:2]warp_img1 = cv2.warpPerspective(image1, H, (cols1 + cols2, rows2))warp_img1[:rows2, :cols2] = image2return warp_img1if __name__ == "__main__":# 读取两张图像img1 = cv2.imread('image1.jpg')img2 = cv2.imread('image2.jpg')# 找到关键点和描述符kp1, des1 = find_keypoints_and_descriptors(img1)kp2, des2 = find_keypoints_and_descriptors(img2)# 进行特征点匹配matches = match_keypoints(des1, des2)# 使用RANSAC估计单应性矩阵H = ransac_homography(matches, kp1, kp2)# 进行全景图像拼接result = stitch_images(img1, img2, H)# 显示拼接结果cv2.imshow('Panorama', result)cv2.waitKey(0)cv2.destroyAllWindows()
为了达到更好的拼接效果,可能需要使用更复杂的图像配准和融合技术。
相关文章:
python数字图像处理基础(九)——特征匹配
目录 蛮力匹配(ORB匹配)RANSAC算法全景图像拼接 蛮力匹配(ORB匹配) Brute-Force匹配非常简单,首先在第一幅图像中选取一个关键点然后依次与第二幅图像的每个关键点进行(描述符)距离测试&#x…...

k8s的对外服务ingress
1、service的作用体现在两个方面 (1)集群内部:不断跟踪pod的变化,更新deployment中的pod对象,基于pod的ip地址不断变化的一种服务发现机制 (2)集群外部:类似于负载均衡器ÿ…...
[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05-3+4
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - Kalman Filter卡尔曼滤波器 Ch05-34 3. Step by step : Deriation of Kalmen Gain 卡尔曼增益/因数 详细推导4. Priori/Posterrori error Covariance Martix 误差协方差矩阵 3. Step by step :…...
关于前端面试中forEach方法的灵魂7问?
目录 前言 一、forEach方法支持处理异步函数吗? 二、forEach方法在循环过程中能中断吗? 三、forEach 在删除自己的元素后能重置索引吗? 四、forEach 的性能相比for循环哪个好? 五、使用 forEach 会不会改变原来的数组&#…...

AI小程序添加深度合成类目解决办法
基于文言一心和gpt等大模型做了一个ai助理小程序,在提交“一点AI助理”小程序时,审核如下: 失败原因1 审核失败原因 你好,你的小程序涉及提供提供文本深度合成技术 (如: AI问答) 等相关服务,请补充选择:深度…...

C/C++ BM6判断链表中是否有环
文章目录 前言题目解决方案一1.1 思路阐述1.2 源码 解决方案二2.1 思路阐述2.2 源码 总结 前言 做了一堆单链表单指针的题目,这次是个双指针题,这里双指针的作用非常明显。 题目 判断给定的链表中是否有环。如果有环则返回true,否则返回fal…...

【Java 设计模式】结构型之适配器模式
文章目录 1. 定义2. 应用场景3. 代码实现结语 适配器模式(Adapter Pattern)是一种结构型设计模式,用于将一个类的接口转换成客户端期望的另一个接口。这种模式使得原本由于接口不兼容而不能一起工作的类可以一起工作。在本文中,我…...

使用函数计算,数禾如何实现高效的数据处理?
作者:邱鑫鑫,王彬,牟柏旭 公司背景和业务 数禾科技以大数据和技术为驱动,为金融机构提供高效的智能零售金融解决方案,服务银行、信托、消费金融公司、保险、小贷公司等持牌金融机构,业务涵盖消费信贷、小…...

卷积和滤波对图像操作的区别
目录 问题引入 解释 卷积 滤波 问题引入 卷积和滤波是很相似的,都是利用了卷积核进行操作 那么他们之间有什么区别呢? 卷积:会影响原图大小 滤波:不会影响原图大小 解释 卷积 我们用这样一段代码来看 import torch.nn as …...

李沐深度学习-线性回归从零开始
# 核心Tensor,autograd import torch from IPython import display import numpy as np import random from matplotlib import pyplot as pltimport syssys.path.append(路径) from d2lzh_pytorch import * backward()函数:一次小批量执行完在进行反向传播 线性回归…...
CentOS 8.5 安装图解
特特特别的说明 CentOS发行版已经不再适合应用于生产环境,客观条件不得不用的话,优选7.9版本,8.5版本次之,最次6.10版本(比如说Oracle 11GR2就建议在6版本上部署)! 引导和开始安装 选择倒计时结…...
好用的流程图工具
分享工作中常用的装逼工具 目前市面上的流程图或者思维导图工具挺多的,但是有的会限制使用数量或者收费,典型的有processon、Xmind,推荐今天Mermaid(官网)。 快速上手 中文教程:Mermaid 初学者用户指南 | Mermaid 中文网。我们选择…...
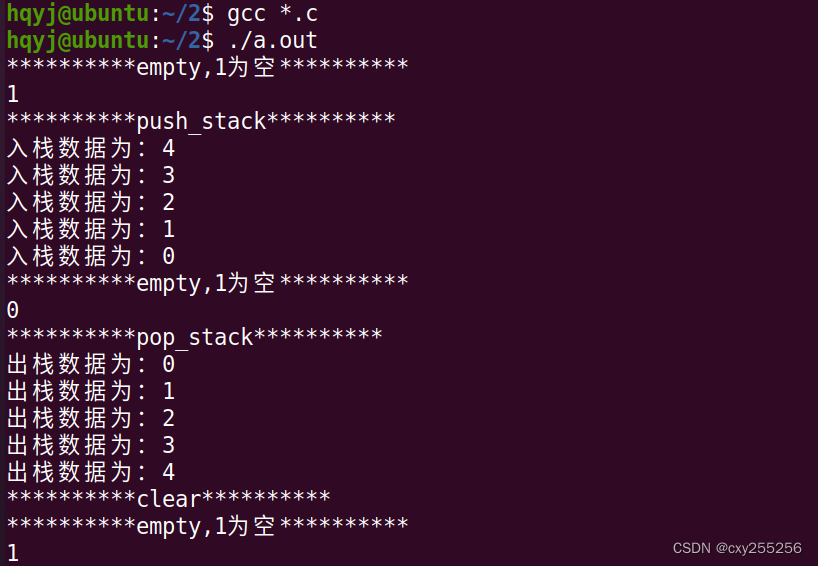
数据结构:链式栈
stack.h /* * 文件名称:stack.h * 创 建 者:cxy * 创建日期:2024年01月18日 * 描 述: */ #ifndef _STACK_H #define _STACK_H#include <stdio.h> #include <stdlib.h>typedef struct stack{int data…...

openssl3.2 - 官方demo学习 - mac - gmac.c
文章目录 openssl3.2 - 官方demo学习 - mac - gmac.c概述笔记END openssl3.2 - 官方demo学习 - mac - gmac.c 概述 使用GMAC算法, 设置参数(指定加密算法 e.g. AES-128-GCM, 设置iv) 用key执行初始化, 然后对明文生成MAC数据 官方注释给出建议, key, iv最好不要硬编码出现在程…...
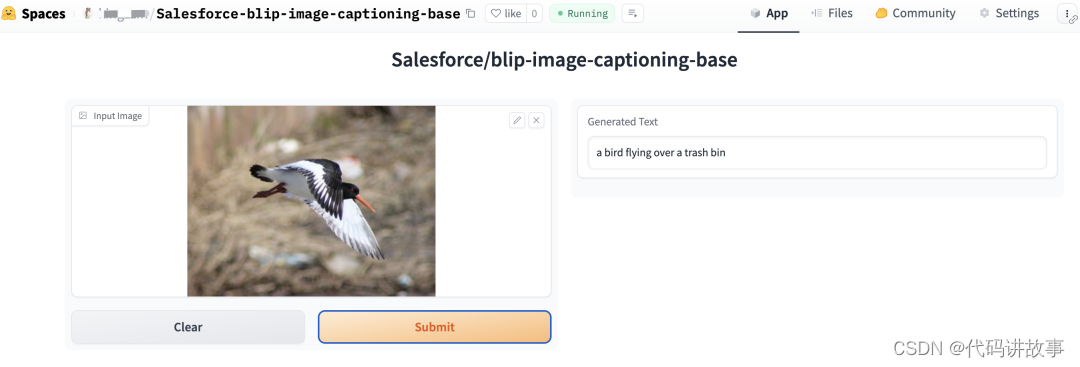
HugggingFace 推理 API、推理端点和推理空间相关模型部署和使用以及介绍
HugggingFace 推理 API、推理端点和推理空间相关模型部署和使用以及介绍。 Hugging Face是一家开源模型库公司。 2023年5月10日,Hugging Face宣布C轮1亿美元融资,由Lux Capital领投,红杉资本、Coatue、Betaworks、NBA球星Kevin Durant等跟投…...
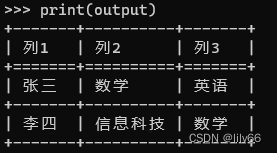
python的tabulate包在命令行下输出表格不对齐
用tabulate可以在命令行下输出表格。 from tabulate import tabulate# 定义表头 headers [列1, 列2, 列3]# 每行的内容 rows [] rows.append((张三,数学,英语)) rows.append((李四,信息科技,数学))# 使用 tabulate 函数生成表格 output tabulate(rows, headersheaders, tab…...
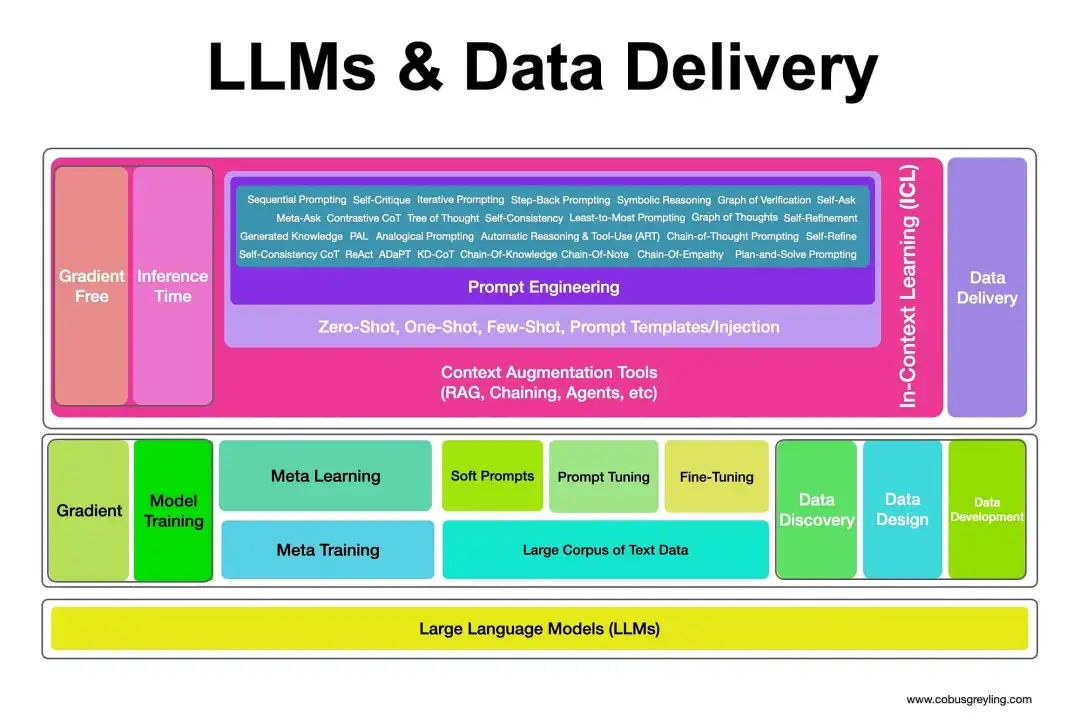
LLM之幻觉(二):大语言模型LLM幻觉缓减技术综述
LLM幻觉缓减技术分为两大主流,梯度方法和非梯度方法。梯度方法是指对基本LLM进行微调;而非梯度方法主要是在推理时使用Prompt工程技术。LLM幻觉缓减技术,如下图所示: LLM幻觉缓减技术值得注意的是: 检索增强生成&…...

C# 使用多线程,关闭窗体时,退出所有线程
this.Close(); 只是关闭当前窗口,若不是主窗体的话,是无法退出程序的,另外若有托管线程(非主线程),也无法干净地退出;Application.Exit(); 强制所有消息中止,退出所有的窗体&…...
数据结构实验6:图的应用
目录 一、实验目的 1. 邻接矩阵 2. 邻接矩阵表示图的结构定义 3. 图的初始化 4. 边的添加 5. 边的删除 6. Dijkstra算法 三、实验内容 实验内容 代码 截图 分析 一、实验目的 1.掌握图的邻接矩阵的存储定义; 2.掌握图的最短路径…...

Spring Boot整合JUnit
引言 测试是软件开发过程中不可或缺的一环,而JUnit作为Java生态中最流行的测试框架之一,与Spring Boot的整合为开发者提供了一套强大的测试工具。本文将讨论Spring Boot整合JUnit的技术细节、最佳实践以及测试驱动开发(TDD)的优雅…...

英雄联盟自动化助手:5分钟告别繁琐操作,专注游戏策略的终极方案
英雄联盟自动化助手:5分钟告别繁琐操作,专注游戏策略的终极方案 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 你是否…...
)
protobufjs 编译命令选错就报错?一文搞懂 pbjs 的 -w 参数(es6 vs commonjs 实战解析)
ProtobufJS编译模块类型选型指南:ES6与CommonJS的深度对比与实战避坑 最近在Vite项目中集成Protobuf时,编译后的模块导入总是抛出The requested module does not provide an export named错误。这个问题困扰了我整整两天,最终发现根源在于pbj…...

别再折腾源码编译了!用Docker 5分钟搞定 mediasoup-demo v5 视频会议服务器部署
5分钟极速部署:Docker化mediasoup视频会议系统实战指南 在实时音视频通信领域,快速搭建可靠的测试环境往往是开发者面临的第一道门槛。传统源码编译方式需要处理Node.js版本兼容、依赖下载、端口配置等一系列繁琐问题,而Docker技术为这一过程…...

Linux命令行玩转CAN总线:像查日志一样用grep分析candump实时数据流
Linux命令行玩转CAN总线:像查日志一样用grep分析candump实时数据流 在Linux系统管理领域,日志分析是每个开发者都熟悉的日常操作。当面对CAN总线这样的专业数据流时,其实可以运用同样的思维——将candump视为持续输出的数据源,用g…...

Keil MDK 项目迁移避坑指南:当你的旧工程遇到‘Default Compiler Version 5 is not available’
Keil MDK项目迁移实战:编译器版本冲突的工程级解决方案 当你从同事手中接过一个历史遗留的Keil MDK项目,或从版本控制系统拉取多年前的嵌入式工程时,最令人头疼的莫过于打开工程后迎面而来的编译器报错。其中"Default Compiler Version …...

学习规划需要定期调整吗?
在当今竞争激烈的教育环境中,学习规划对于学生的成长和发展起着至关重要的作用。作为一名在学习规划领域深耕十年的专家,我见证了无数学生在学习规划的指引下取得优异成绩,也看到了一些学生因为规划不合理而走了不少弯路。那么,学…...

如何用3步将B站视频变成文字稿?这个智能转录工具让你告别手动记录
如何用3步将B站视频变成文字稿?这个智能转录工具让你告别手动记录 【免费下载链接】bili2text Bilibili视频转文字,一步到位,输入链接即可使用 项目地址: https://gitcode.com/gh_mirrors/bi/bili2text 你是否曾经为了记录一个B站视频…...

CW32L083定时器中断全解析:从基础定时到PWM捕获的实战指南
1. 项目概述与核心价值最近在做一个基于CW32L083的低功耗数据采集项目,其中有一个核心需求是每隔100毫秒精确采集一次传感器数据。为了实现这个看似简单的定时功能,我不得不把CW32的定时器子系统从头到尾捋了一遍。这不捋不知道,一捋才发现&a…...

从样本到序列:枸杞DNA条形码鉴定的关键步骤与陷阱规避
一、引言:为何需要PCR鉴定枸杞?枸杞(Lyciumspp.)作为药食同源的重要资源,市场长期存在以土库曼枸杞、白刺等近缘种或伪品冒充高价值宁夏枸杞(L. barbarum)的现象。传统鉴别依赖果实形态和显微特…...

Linux CoreDump实战指南:从原理到容器化环境配置与自动化分析
1. 项目概述:为什么我们需要一份CoreDump实战指南?在服务器运维和后台开发领域,最让人头疼的瞬间之一,莫过于半夜被电话叫醒,被告知线上服务“挂了”。登录服务器一看,进程消失得无影无踪,只留下…...