【AI】深度学习在编码中的应用(8)
接上文,本文来梳理和学习智能编码中, 基于残差编码的框架。
智能图像编解码器的成功也推动了智能视频编解码器的发展。传统的视频压缩方法依靠预测编码对运动信息和残差信息分别进行编码。根据时-空域冗余消除方式和阶段不同,现有相关方法可分为基于残差编码的框架、基于条件编码的框架、基于3D自编码器的框架和其他架构。
基于残差编码的框架,首先基于已解码参考帧,生成当前待编码帧的运动信息,然后生成运动补偿预测帧,最后对残差进行编码。所有块通过一个损失函数进行联合学习。值得注意的是,运动补偿过程可在图像空间域或特征空间域完成。运动估计的关键是基于学习的光流估计模块,以建立起视频序列中连续帧之间的关系。以下具体展开介绍:
一、尺度空间流估计
尺度空间流估计是指在多尺度表示下对图像中的运动或变化进行估计的过程。在多尺度框架下,图像被表示为不同分辨率或尺度的层级结构,每个尺度上的信息都对应着不同的细节和上下文。尺度空间流估计的目标是在这些不同尺度的图像之间找到对应点或区域的运动矢量,从而捕捉到图像序列中的动态信息。
原理
尺度空间流估计的原理基于以下观察:自然图像中的物体和结构通常在不同的尺度上表现出一致性和连贯性。通过在多个尺度上分析图像,可以捕获到更丰富的动态信息,并且对于遮挡、光照变化和非刚性运动等复杂情况具有更好的鲁棒性。在尺度空间流估计中,通常会使用金字塔结构来表示图像的多尺度信息,然后在每个尺度上独立或联合地估计运动矢量。
优势
- 鲁棒性:尺度空间流估计能够处理多种复杂的运动模式,包括非刚性运动和部分遮挡,因为它能够在不同的尺度上捕捉和分析动态信息。
- 效率:通过在不同尺度上进行分析,尺度空间流估计能够有效地减少计算复杂度,同时保持较高的估计精度。
- 灵活性:尺度空间方法可以与多种图像处理和计算机视觉技术相结合,如特征提取、目标跟踪和场景理解等。
劣势
- 计算复杂度:尽管尺度空间方法通过分层处理降低了计算复杂度,但在多尺度上进行分析和估计仍然需要相对较高的计算资源。
- 参数选择:选择合适的尺度参数和估计策略对于获得最佳性能至关重要,但这也是一个具有挑战性的问题。
- 边界效应:在多尺度处理中,图像边界附近的区域可能会受到不准确的估计影响。
关键技术
- 多尺度表示:构建有效的多尺度图像表示,如高斯金字塔或拉普拉斯金字塔,是尺度空间流估计的基础。
- 运动模型:选择合适的运动模型(如仿射模型、透视模型等)来描述图像间的动态关系。
- 匹配算法:设计高效的匹配算法来在不同尺度的图像之间找到对应点或区域。
- 优化策略:使用优化策略(如光流法、能量最小化方法等)来精细化估计结果并提高准确性。
- 正则化技术:应用正则化技术来增强估计的鲁棒性并减少噪声和异常值的影响。
尺度空间流估计在智能图像压缩中扮演着重要角色,它能够帮助压缩算法更有效地捕捉和利用图像序列中的动态信息,从而实现更高效的压缩和更好的重构质量。
二、多尺度光流估计
多尺度光流估计是一种技术,它通过分析图像序列中不同尺度下的像素或特征点运动来估计视觉场景中的运动场。在智能图像压缩中,这种技术被用来预测后续帧与参考帧之间的运动信息,从而减少需要编码的数据量。
原理
多尺度光流估计的原理在于利用图像金字塔或多分辨率表示来在不同尺度上分析运动。通常,先在较粗的尺度上估计大范围的运动,然后利用这些估计作为较细尺度上运动的初始值或约束条件。通过跨尺度的信息传递和细化,多尺度光流估计能够捕捉从快速全局运动到缓慢局部细节的各种运动模式。
优势
- 鲁棒性:多尺度方法对于噪声、光照变化和遮挡等复杂情况具有更好的鲁棒性,因为它能够在不同尺度上整合信息。
- 精确性:通过在不同尺度上逐步细化运动估计,多尺度光流能够提供比单一尺度方法更精确的运动矢量。
- 计算效率:多尺度方法允许在较粗的尺度上进行快速初步估计,从而加速整体计算过程。
劣势
- 计算复杂度:尽管多尺度方法可以提高估计的精确性和鲁棒性,但它也增加了计算的复杂度和资源需求。
- 参数调整:选择合适的尺度、初始估计和细化策略需要经验和实验调整。
- 边界问题:在图像边界或遮挡区域,多尺度光流估计可能面临挑战,因为这些区域的运动模式可能与周围区域不一致。
关键技术
- 图像金字塔:构建图像的多尺度表示,如高斯金字塔或拉普拉斯金字塔,作为分析的基础。
- 运动估计与细化:在每个尺度上应用光流算法来估计运动,并使用上一尺度的估计来初始化或约束当前尺度的估计。
- 插值与传播:将粗尺度上的运动信息插值或传播到细尺度上,以指导细尺度上的运动搜索。
- 优化与正则化:应用优化算法和正则化技术来提高运动估计的准确性和鲁棒性,例如通过最小化能量函数或应用平滑约束。
- 遮挡处理:开发策略来处理遮挡区域,其中运动信息可能不完整或不一致。
在智能图像压缩中,多尺度光流估计通过提供精确且鲁棒的运动信息,有助于减少帧间冗余,从而实现更有效的压缩。同时,它还能够提高压缩视频的质量,特别是在低比特率条件下。
三、特征空间光流估计
特征空间光流估计是一种在图像的特征空间中进行运动估计的技术。它通过分析图像序列中特征点的运动来预测和编码图像间的动态信息,从而实现高效的图像压缩。
原理
特征空间光流估计的原理主要包括两个步骤:特征提取和运动估计。
- 特征提取:首先,从图像中提取出具有代表性和稳定性的特征点,如角点、边缘、斑点等。这些特征点通常包含了图像的重要信息,并且对光照、尺度和旋转等变化具有一定的鲁棒性。
- 运动估计:然后,在特征空间中跟踪这些特征点的运动轨迹,通过计算特征点在不同帧之间的位置变化来估计运动场。这种估计可以基于光流法、特征匹配或其他运动估计算法。
优势
- 鲁棒性:特征空间光流估计对图像的噪声、光照变化和部分遮挡等复杂情况具有更好的鲁棒性,因为它依赖于稳定的特征点进行运动估计。
- 数据压缩:通过在特征空间中进行运动估计,可以有效地减少需要编码的数据量,因为只需要编码特征点的位置和运动信息,而不是整个图像的像素值。
- 计算效率:特征空间光流估计通常比基于像素的光流估计更加高效,因为它只关注图像中的一部分重要信息,即特征点。
劣势
- 特征选择:特征点的选择和提取对于特征空间光流估计的性能至关重要,不合适的特征可能导致不准确的运动估计。
- 稀疏性:由于只关注特征点,特征空间光流估计可能会忽略图像中的其他重要信息,导致运动场在某些区域过于稀疏。
- 计算复杂度:虽然特征空间光流估计相对于基于像素的方法更加高效,但在处理大规模特征点集时仍然可能面临计算复杂度的挑战。
关键技术
- 特征提取算法:设计和选择适合图像压缩任务的特征提取算法,如SIFT、SURF或ORB等。
- 特征匹配与跟踪:开发高效的特征匹配算法来在不同帧之间跟踪特征点的运动轨迹。
- 运动估计与优化:应用光流法或其他运动估计技术来计算特征点的运动矢量,并使用优化算法来提高估计的准确性和鲁棒性。
- 特征编码与压缩:设计有效的编码策略来压缩特征点的位置和运动信息,以便在解码端能够重建运动场和原始图像。
特征空间光流估计在智能图像压缩中发挥着重要作用,它能够通过捕捉图像序列中的动态信息来减少冗余数据,从而实现更高效的压缩。同时,它还能够提供对复杂场景的鲁棒性描述,有助于改善压缩图像的质量。
四、时空一致性光流估计
时空一致性光流估计是一种运动估计技术,它通过分析图像序列中像素或特征点在时间和空间上的连贯性运动来预测和编码图像间的动态信息。该技术旨在保持估计的光流场在时间上平滑且在空间上一致,从而提高压缩效率和重建图像的质量。
原理
时空一致性光流估计的原理基于两个主要假设:时间连贯性和空间一致性。
- 时间连贯性:假设相邻帧之间的运动是平滑的,即物体的运动在短时间内不会发生剧烈变化。
- 空间一致性:假设相邻像素或特征点的运动是相似的,特别是在同一物体或同一区域内的像素。
基于这些假设,时空一致性光流估计通过结合前一帧的光流信息和当前帧的观测数据来估计当前帧的光流场。这种估计通常涉及最小化一个能量函数,该函数包括数据项(衡量观测数据与估计光流之间的一致性)和平滑项(鼓励光流场的时空平滑性)。
优势
- 准确性:通过利用时间和空间上的连贯性,时空一致性光流估计能够提供比传统光流方法更准确的运动估计。
- 鲁棒性:对于视频序列中的噪声、光照变化和部分遮挡等情况,时空一致性约束有助于提高估计的鲁棒性。
- 压缩效率:准确的光流估计有助于减少帧间冗余,从而提高压缩效率。
劣势
- 计算复杂度:由于需要同时考虑时间和空间上的连贯性,时空一致性光流估计的计算复杂度相对较高。
- 参数调整:能量函数中的权重参数需要根据具体应用场景进行调整,这可能需要经验和实验来确定。
- 运动不连续处理:在处理运动不连续(如遮挡边界)时,时空一致性约束可能导致估计误差。
关键技术
- 能量函数设计:设计合适的能量函数来平衡数据项和平滑项的贡献,以实现准确且鲁棒的光流估计。
- 优化算法:开发高效的优化算法来最小化能量函数,如梯度下降法、牛顿法等。
- 时空一致性建模:构建有效的模型来捕捉时间和空间上的连贯性,如马尔可夫随机场或条件随机场。
- 遮挡处理策略:开发策略来处理遮挡和运动不连续情况,如使用前向和后向光流检测遮挡区域。
时空一致性光流估计在智能图像压缩中发挥着重要作用,它能够通过提供准确且鲁棒的运动估计来增强压缩效率和图像质量。然而,实际应用中需要权衡计算复杂度和估计准确性之间的关系,并根据具体需求进行参数调整和优化。
五、运动分解模型
运动分解模型是一种用于分析和表示图像序列中运动信息的模型。它将复杂的全局运动或局部运动分解为一系列更简单、更易于编码和处理的运动分量,以便在压缩过程中有效地利用这些运动信息。
原理
运动分解模型的基本原理是将图像序列中的运动场表示为多个运动分量的组合。这些运动分量可以是全局运动(如摄像机的平移、旋转等)和局部运动(如物体在场景中的独立运动)。通过对这些运动分量进行建模和估计,可以提取出关键的运动参数,如运动矢量、仿射变换参数等,然后将其用于后续的残差编码和图像重建过程中。
优势
- 压缩效率:运动分解模型能够提取出图像序列中的关键运动信息,并将其用于残差编码,从而有效地减少需要编码的数据量,提高压缩效率。
- 图像质量:通过准确地表示和重建运动场,运动分解模型能够在压缩过程中保持较好的图像质量,减少运动模糊和失真。
- 灵活性:运动分解模型可以适应不同类型的运动,包括全局运动和局部运动,从而在各种场景下实现有效的压缩。
劣势
- 计算复杂度:运动分解模型需要对图像序列中的运动进行建模和估计,这可能需要较高的计算资源和时间成本。
- 模型选择:选择合适的运动分解模型对于获得最佳压缩性能至关重要,但这也需要根据具体应用场景和需求进行权衡和选择。
- 运动估计误差:不准确的运动估计可能导致运动分解模型在压缩过程中引入误差,从而影响图像质量和解码效果。
关键技术
- 运动建模:选择合适的运动模型来表示图像序列中的全局运动和局部运动,如仿射模型、透视模型等。
- 运动估计:开发高效的运动估计算法来准确地估计运动场和运动参数,如块匹配算法、光流法等。
- 运动分解:将估计得到的运动场分解为多个运动分量,提取出关键的运动信息,如运动矢量、变换参数等。
- 残差编码:利用提取出的运动信息进行残差编码,将残差数据与运动参数一起传输和存储,以便在解码端进行图像重建。
运动分解模型在智能图像压缩中发挥着重要作用,它通过对图像序列中的运动进行建模和分解,提取出关键的运动信息,并将其用于后续的压缩和重建过程中。这有助于提高压缩效率和图像质量,实现更高效的智能图像压缩。
六、高阶光流估计
高阶光流估计是一种图像处理技术,它通过分析和建模图像序列中像素或特征点的高阶(非线性或更复杂)运动模式来估计视觉场景中的动态变化。在智能图像压缩中,高阶光流估计用于预测后续帧与参考帧之间的复杂运动,从而减少需要编码的数据量。
原理
高阶光流估计的原理在于使用高阶运动模型来描述像素或特征点在连续帧之间的运动轨迹。这些模型可以包括多项式、样条曲线或其他非线性函数,它们能够捕捉比传统线性或仿射模型更复杂的运动模式。通过拟合这些高阶模型到实际的像素运动数据,可以得到更准确和鲁棒的运动估计。
优势
- 准确性:高阶光流估计能够捕捉复杂的非线性运动,从而提供更准确的运动矢量和预测。
- 鲁棒性:对于快速运动、旋转、变形等复杂场景,高阶模型通常比低阶模型更鲁棒。
- 适应性:高阶光流估计可以适应各种不同类型的运动,包括全局运动和局部细节运动。
劣势
- 计算复杂度:高阶模型的拟合和求解通常比低阶模型更复杂,需要更高的计算资源。
- 参数调整:选择合适的高阶模型和参数可能需要经验和实验调整。
- 过拟合风险:在某些情况下,高阶模型可能过度拟合噪声或局部异常,导致不准确的运动估计。
关键技术
- 模型选择:根据应用场景和运动特性选择合适的高阶运动模型。
- 运动估计与拟合:利用优化算法(如最小二乘法、迭代方法等)来拟合高阶模型到实际的运动数据。
- 正则化与约束:引入正则化项或约束条件来防止过拟合,并提高运动估计的鲁棒性。
- 层次化与多尺度处理:结合图像金字塔或多尺度表示来在不同尺度上分析和估计运动,从而提高计算效率和估计精度。
在智能图像压缩中,高阶光流估计通过提供更准确和鲁棒的运动预测,有助于减少帧间冗余,并实现更高效的压缩。然而,由于其较高的计算复杂度和参数调整需求,实际应用中需要权衡压缩性能与计算资源的关系。
七、像素到特征的运动分析方法
像素到特征的运动分析方法是一种图像处理技术,它通过分析和跟踪图像序列中像素级的动态信息来提取特征级的运动矢量。这种方法旨在将低级的像素信息转换为更高级、更紧凑的特征表示,以便于后续的压缩和处理。
原理
该方法的原理可以概括为以下几个步骤:
- 像素级分析:首先,对原始图像的像素数据进行详细分析,包括亮度、颜色、纹理等属性。
- 特征提取:然后,从像素数据中提取出具有代表性和稳定性的特征,这些特征能够有效地描述图像中的重要结构和动态信息。
- 运动估计:在特征提取的基础上,通过比较不同帧之间特征的位置和变化来估计运动场。这通常涉及到特征匹配、光流法或其他运动估计技术。
- 特征级表示:最后,将估计得到的运动信息以特征级的形式进行表示和编码,以便于后续的压缩和存储。
优势
- 数据压缩:通过将像素级的动态信息转换为特征级的运动矢量,可以大大减少需要编码和存储的数据量。
- 鲁棒性:特征级的表示对于图像的噪声、光照变化和部分遮挡等复杂情况具有更好的鲁棒性。
- 计算效率:相对于直接处理像素数据,特征级的方法通常更加高效,因为它只关注图像中的关键信息。
劣势
- 特征选择:选择合适的特征对于方法的性能至关重要,不合适的特征可能导致信息丢失或不准确的运动估计。
- 精度损失:在从像素级到特征级的转换过程中,可能会损失一些细节信息,从而影响重构图像的精度和质量。
- 计算复杂度:虽然特征级的方法相对于像素级更加高效,但在特征提取和运动估计过程中仍然可能面临较高的计算复杂度。
关键技术
- 特征提取算法:设计和选择适合图像压缩任务的特征提取算法是关键,需要考虑特征的代表性、稳定性和计算效率。
- 运动估计技术:应用高效的运动估计技术来准确估计特征级的运动场,包括特征匹配、光流法或其他先进的运动估计算法。
- 编码策略:开发有效的编码策略来压缩和表示特征级的运动信息,以便在实现高压缩比的同时保持良好的重构质量。
- 优化与正则化技术:应用优化算法和正则化技术来提高运动估计的准确性和鲁棒性,例如通过最小化能量函数或应用平滑约束来优化运动场。
像素到特征的运动分析方法在智能图像压缩中发挥着重要作用,它能够通过有效地提取和编码特征级的运动信息来实现数据压缩和计算效率的平衡。同时,它也为后续的图像处理和分析提供了更高级、更紧凑的特征表示。
相关文章:
)
【AI】深度学习在编码中的应用(8)
接上文,本文来梳理和学习智能编码中, 基于残差编码的框架。 智能图像编解码器的成功也推动了智能视频编解码器的发展。传统的视频压缩方法依靠预测编码对运动信息和残差信息分别进行编码。根据时-空域冗余消除方式和阶段不同,现有相关方法可…...
什么是VUE 创建第一个VUE实例
一、什么是Vue 概念:Vue (读音 /vjuː/,类似于 view) 是一套 构建用户界面 的 渐进式 框架 Vue2官网:Vue.js 1.什么是构建用户界面 基于数据渲染出用户可以看到的界面 2.什么是渐进式 所谓渐进式就是循序渐进,不一定非得把Vu…...

进程间协同:从进程启动、同步与互斥到进程间通信
进程间协同的目的 在操作系统中,进程是计算机进行任务分配和调度的基本单位。在计算机系统中,有很多任务是无法由单个进程独立完成的,需要多个进程共同参与并协作完成。这就像在现实生活中,有些工作需要一个团队来完成࿰…...
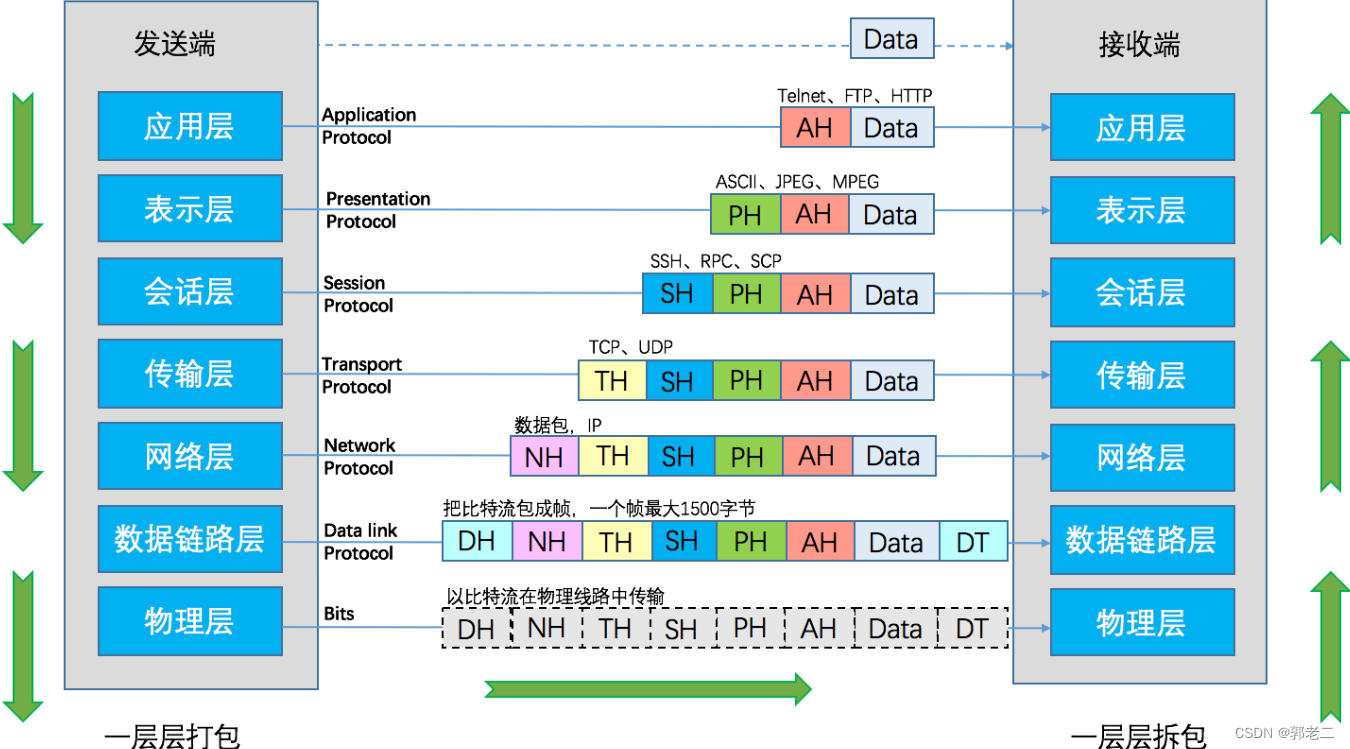
【驱动】TI AM437x(内核调试-06):网卡(PHY和MAC)、七层OSI
1、网络基础知识 1.1 七层OSI 第一层:物理层。 1)需求: 两个电脑之间如何进行通信? 具体就是一台发比特流,另一台能够收到。于是就有了物理层:主要是定义设备标准,如网线的额接口类型、管线的接口类型、各种传输介质的传输速率等。它的主要作用是传输比特流,就是从1/0…...

Java基础面试题 Object
Java基础面试题 Object 文章目录 Java基础面试题 ObjectObjectObject 类的常见方法有哪些? 和 equals() 的区别hashCode() 有什么用?为什么要有 hashCode?为什么重写 equals() 时必须重写 hashCode() 方法? 文章来自Java Guide 用…...
)
5G_射频测试_接收机测量(五)
7.2 Reference sensitivity level 接收灵敏度是表示接收机能解析出信号的最小功率(和接收机noise figure相关所以RX lineup的大部分工作就是在调整Gain达到最佳NF)The throughput shall be ≥ 95%(BER:bit error rate 并不是L3ca…...
ESP32-HTTP_webServer库(Arduino)
ESP32-HTTP 介绍 ESP32是一款功能强大的微控制器,具有丰富的网络和通信功能。其中之一就是支持HTTP协议,这使得ESP32可以用于创建Web服务器。 HTTP是什么? HTTP(Hyper Text Transfer Protocol),即超文本传…...

无法找到mfc100.dll的解决方法分享,如何快速修复mfc100.dll文件
在日常使用电脑时,我们可能会碰到一些系统错误提示,比如“无法找到mfc100.dll”的信息。这种错误通常会阻碍代码的执行或某些应用程序的启动。为了帮助您解决这一问题,本文将深入探讨其成因,并提供几种不同的mfc100.dll解决方案。…...

[VulnHub靶机渗透]:billu_b0x 快速通关
🍬 博主介绍👨🎓 博主介绍:大家好,我是 hacker-routing ,很高兴认识大家~ ✨主攻领域:【渗透领域】【应急响应】 【python】 【VulnHub靶场复现】【面试分析】 🎉点赞➕评论➕收藏 == 养成习惯(一键三连)😋 🎉欢迎关注💗一起学习👍一起讨论⭐️一起进步…...
Docker安装开源Blog(Typecho)
前言 首先这个镜像是centos7.9进行安装PHP环境,然后挂载目录去运行的,镜像大概300MB左右,没学过PHP,没办法给Dockerfile文件 参考文章:Docker安装Typecho | D-y Blog感知不强,图一乐https://www.wlul.top…...
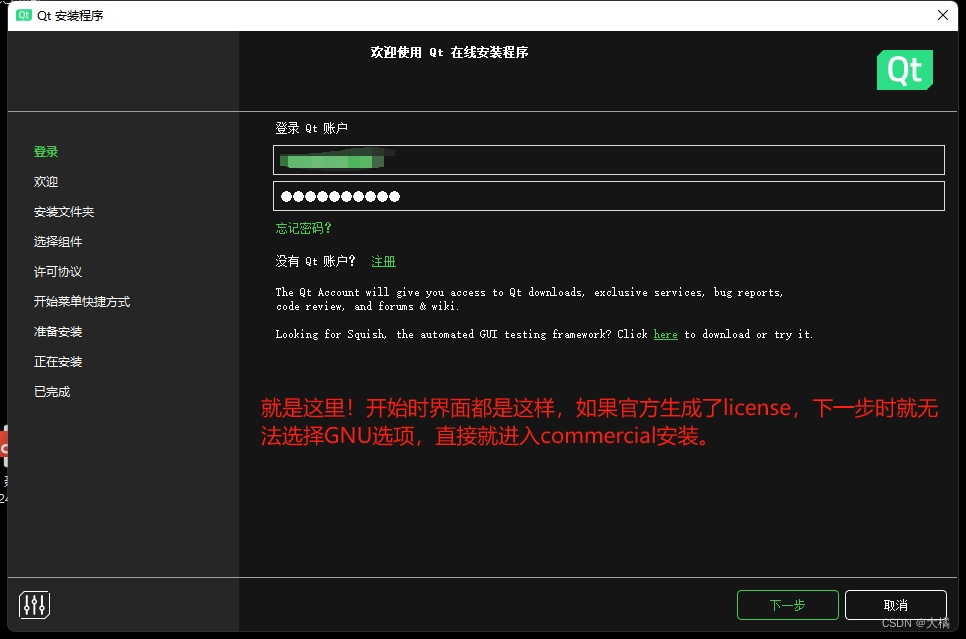
【Qt-license】误操作qt下载导致只能安装商业版试用十天,无法安装社区版
背景: 原本是为了学习qml,需要下载一个design studio,而这个需要比较新版的安装程序,但新版的安装程序官方都是online安装。于是从官网找下载链接。毕竟是英文的,又心急,误打误撞中我选择了商业版试用。 其…...
数据操作——缺失值处理
缺失值处理 缺失值的处理思路 如果想探究如何处理无效值, 首先要知道无效值从哪来, 从而分析可能产生的无效值有哪些类型, 在分别去看如何处理无效值 什么是缺失值 一个值本身的含义是这个值不存在则称之为缺失值, 也就是说这个值本身代表着缺失, 或者这个值本身无意义, 比如…...
【刷题笔记4】
动态规划题目汇总 斐波那契数列:1,1,2,3,5,8,13…… 递归一把解决三类问题:1.数据定义是按照递归的(斐波那契数列)。2.问题解法是按递归算法实现的。 3.数据…...
cuda二进制文件中到底有些什么
大家好。今天我们来讨论一下,相比gcc编译器编译的二进制elf文件,包含有 cuda kernel 的源文件编译出来的 elf 文件有什么不同呢? 之前研究过一点 tvm。从 BYOC 的框架中可以得知,前端将模型 partition 成 host 和 accel(accel 表…...

怎么从视频中提取动图?一个方法快速提取gif
视频以连续的方式播放一系列图像帧,通过每秒播放的帧数(帧率)来创做,由于GIF动图则以循环播放一系列静态图像帧的方式展现动画效果。由于视频的优势在于流畅的动画、丰富的细节和长时间播放,因此常用于电影、电视节目、…...

String字符串的比较和hash函数减少哈希冲突
1.为什么比较字符串通过hash值比通过字符串本身效率更高 比较两个字符串的哈希值相对于比较两个字符串本身的效率更高,原因如下: 哈希函数具有快速计算的特性:哈希函数可以将一个字符串转换为一个固定长度的哈希值。这个转换过程通常是非常…...

【数据库原理】(38)数据仓库
数据仓库(Data Warehouse, DW)是为了满足企业决策分析需求而设计的数据环境,它与传统数据库有明显的不同。 一.数据库仓库概述 定义: 数据仓库是一个面向主题的、集成的、相对稳定的、反映历史变化的数据集合,用于支持企业管理和…...
已有标准库的拓展和修改)
C++17新特性(四)已有标准库的拓展和修改
这一部分介绍C17对已有标准库组件的拓展和修改。 1. 类型特征拓展 1.1 类型特征后缀_v 自从C17起,对所有返回值的类型特征使用后缀_v,例如: std::is_const_v<T>; // C17 std::is_const<T>::value; // C11这适用于所有返回值的…...
软件是什么?前端,后端,数据库
软件是什么? 由于很多东西没有实际接触,很难理解,对于软件的定义也是各种各样。但是我还是不理解,软件开发中的前端,后端,数据库到底有什么关系呢! 这个问题足足困扰了三年半,练习时…...
Vue3+ElementUI 多选框中复选框和名字点击方法效果分离
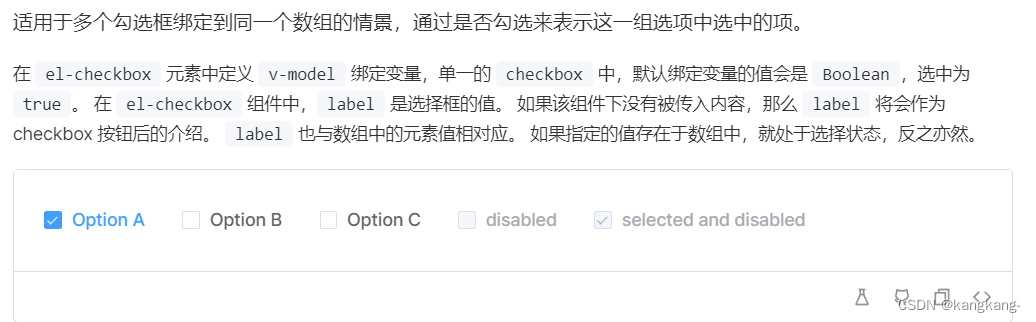
现在的需求为 比如我点击了Option A ,触发点击Option A的方法,并且复选框不会取消勾选,分离的方法。 <el-checkbox-group v-model"mapWork.model_checkArray.value"> <div class"naipTypeDom" v-for"item …...

从SD销售订单到MM采购入库:一条龙打通SAP核心业务流的BAPI实战
SAP跨模块BAPI集成实战:从销售订单到采购入库的自动化业务流 当企业规模扩张到一定程度,各业务部门之间的数据孤岛问题就会成为效率提升的最大障碍。想象一下这样的场景:销售部门接单后,采购团队需要手动创建采购需求,…...

终极指南:如何用Prodigal在3分钟内完成原核生物基因预测
终极指南:如何用Prodigal在3分钟内完成原核生物基因预测 【免费下载链接】Prodigal Prodigal Gene Prediction Software 项目地址: https://gitcode.com/gh_mirrors/pr/Prodigal 还在为复杂的基因预测工具头疼吗?面对海量的微生物基因组数据&…...

UE5 Niagara实战:手把手教你用自定义模块实现粒子间的实时位置同步
UE5 Niagara实战:用自定义模块构建粒子间的动态位置同步系统 在实时视觉效果开发中,粒子系统间的交互一直是提升场景动态表现力的关键。当两个发射器的粒子需要建立位置关联时——比如魔法飞弹追踪目标、萤火虫群集飞行或者流体颗粒间的引力作用——直接…...

北京UPS不间断电源经销商推荐名录
一、推荐公司概览中伟博信(北京)电子科技有限公司山特电子(深圳)有限公司北京办事处施耐德电气(中国)有限公司北京分公司科华数据股份有限公司北京分公司深圳科士达科技股份有限公司北京子公司二、北京地区…...

如何快速掌握3DS硬件检测:面向初学者的完整3DSident使用指南
如何快速掌握3DS硬件检测:面向初学者的完整3DSident使用指南 【免费下载链接】3DSident PSPident clone for 3DS 项目地址: https://gitcode.com/gh_mirrors/3d/3DSident 你是否曾好奇自己的Nintendo 3DS内部藏着什么秘密?想知道它的制造日期、电…...
)
【限时解密】DeepSeek内部SSO安全加固白皮书(含JWT签名验签绕过防护方案)
更多请点击: https://codechina.net 第一章:DeepSeek SSO单点登录体系概览 DeepSeek SSO 是面向企业级 AI 开发平台构建的统一身份认证与访问控制中枢,支持 OAuth 2.0、OpenID Connect 及 SAML 2.0 多协议接入,实现跨服务&#x…...

华硕笔记本性能优化神器:3步掌握G-Helper轻量级控制中心
华硕笔记本性能优化神器:3步掌握G-Helper轻量级控制中心 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, Vivobook, Zenbook, …...

Source Han Serif CN:免费开源中文字体跨平台完整解决方案终极指南
Source Han Serif CN:免费开源中文字体跨平台完整解决方案终极指南 【免费下载链接】source-han-serif-ttf Source Han Serif TTF 项目地址: https://gitcode.com/gh_mirrors/so/source-han-serif-ttf 还在为中文字体授权费用高、跨平台兼容性差而烦恼吗&…...

云深处冲刺科创板:年营收3.4亿,净利2868万 拟募资25亿 又一杭州6小龙拟IPO
雷递网 雷建平 5月19日杭州云深处科技股份有限公司(简称:“云深处”)日前递交招股书,准备在科创板上市。云深处计划募资25亿元,其中,11.7亿元用于具身算法及模型研发项目,5.54亿用于机器人本体与…...
碳感知Transformer与硬件协同优化框架解析
1. CATransformers:碳感知Transformer与硬件协同优化框架解析在AI技术快速发展的今天,Transformer模型已成为自然语言处理、计算机视觉和多模态任务的核心架构。然而,这些模型的广泛部署带来了显著的碳排放问题——不仅包括训练和推理过程中的…...