百度Apollo | 实车自动驾驶:感知、决策、执行的无缝融合

⛳️ 推荐
前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家。点击跳转到网站。
文章目录
- ⛳️ 推荐
- 引言
- 步骤一:自动驾驶准备
- 步骤二:启动并打开 Dreamview+
- 2. 启动 Dreamview+
- 3. 选择模式和操作
- 4. 选择车辆和地图
- 5. 打开所需要的模块
- 6. 查看连接状态
- 7. 编辑行驶路线
- 步骤二:启动自动驾驶
引言
近年来,实车自动驾驶技术在汽车行业掀起了一场技术革命,为我们带来了前所未有的驾驶体验。本文将深入探讨实车自动驾驶技术的各个方面,从感知到决策再到执行,揭示这一领域的前沿技术和挑战。在这场技术革命的浪潮中,我们将一同探寻未来驾驶的奇迹。
步骤一:自动驾驶准备
1. 启动 CAN 卡
启动工控机后,在桌面上打开命令行终端(Terminal),进入 CAN 卡目录(默认在 home 路径下),启动 CAN 驱动:
bash ~/socketcan/start.sh
步骤二:启动并打开 Dreamview+
1. 启动 Apollo Docker 环境
如果您使用的是包管理,请您按照以下步骤操作:
2.打开命令行终端,切换路径到 Apollo:
cd ~/apollo
输入以下命令进入 Apollo Docker 环境:
aem start #创建容器aem enter #进入容器buildtool build
首次进入容器 build, 如果是只编译更新的模块,使用以下命令
buildtool build -p 模块名。
如果您的终端如下面所示,说明您成功进入了 Apollo 的运行容器:

如果您使用的是源码,请您按照以下步骤进入 docker 环境:
- 打开命令行终端,切换路径到 Apollo:
cd ~/apollo #切换路径到apollo,注意cd与~/apollo之间有一个空格
输入以下命令启动 Apollo Docker 环境:
bash docker/scripts/dev_start.sh
启动 docker 环境:
bash docker/scripts/dev_into.sh
如果您的终端如下面所示,说明您成功进入了 Apollo 的运行容器:
[user@in-runtime-docker:/apollo]$
2. 启动 Dreamview+
- 在 Apollo Docker 环境下,启动 Dreamview+ 交互界面:
如果您使用的是包管理,请您在 docker 环境中执行以下命令执行以下命令启动 Dreamview+:
aem bootstrap start --plus
注意:
- 如果您想要停止 Dreamview+,提示
Fail to start Dreamview,请输入aem bootstrap stop --plus,- 如果您想要重启 Dreamview+,请输入
aem bootstrap restart --plus。
如果您使用的是源码,请您在 docker 环境中执行以下命令执行以下命令启动 Dreamview+:
bash scripts/bootstrap.sh start_plus
注意:
- 如果您想要停止 Dreamview+,请输入
bash scripts/bootstrap.sh stop_plus,- 如果您想要重启 Dreamview+,请输入
bash scripts/bootstrap.sh restart_plus。
打开 Dreamview+。
启动成功后,在浏览器输⼊localhost8888⽹址打开 Dreamview+ 界面。
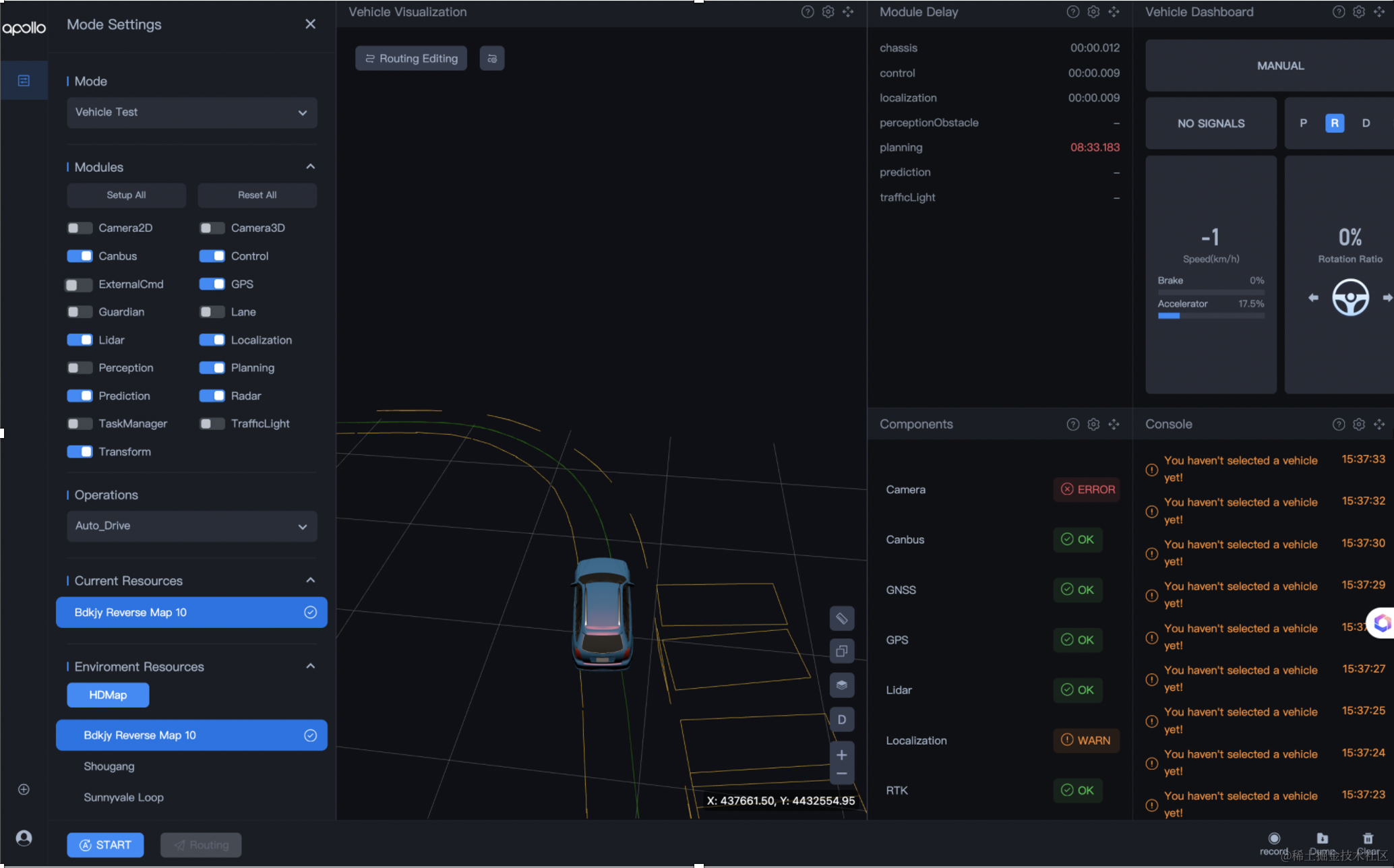
3. 选择模式和操作
在 Mode/模式 中,选择 Vehicle Test/实车模式 。
在 Operations/操作 中,选择 Auto Drive/自动驾驶 。
4. 选择车辆和地图
在 ADS Resources/自动驾驶资源 中,选择实车路测模式的车辆。
-
如有对应车辆配置,可选择对应配置,
-
如无对应车辆配置,可用默认配置。
在 Environment Resources/环境资源 > HD Map/高精地图 中,选择实车路测模式需要的地图。
5. 打开所需要的模块
启动所需要的 Canbus 、 Control 、 ExternalCmd 、 GPS 、 Lidar 、 Localization 、 Planning 、 Prediction 、 Radar 、 Transform 模块。
ExternalCmd 是 Planning 模块的一个子模块,循迹会用到这个子模块,实车模式只开 Planning 模块就可以。
6. 查看连接状态
查看 Component 状态。

说明:
- Component 中显示绿色 OK 为正常,可以进行下面的操作。 - WARNING 黄色只是信号不好,模块已经启动,只要不是 ERROR 就不影响操作。
查看 cyber_monitor 数据。
进入 docker 环境,输入 cyber_monitor,启动的 cyber_monitor 工具中,可以看到很多 channel 信息,其中 /tf 和 /tf_static 对应 Transform 模块,/apollo/localization/pose 对应 Localization 模块,apollo/sensor/gnss/best_pose 对应 GPS 模块。

使用上下方向键选择 channel /apollo/sensor/gnss/best_pose 按右方向键进入此 channel,查看 sol_type 项是否是 NARROW_INT,若为 NARROW_INT,则表示 GPS 信号良好,符合定位要求;若不为 NARROW_INT,则遥控移动下车辆,直到出现 NARROW_INT 为止。

检查所有开启模块均正常后可以进行下面的操作。
7. 编辑行驶路线
在 Vehicle Visualization/车辆可视化面板 中,单击 Routing Editing/路径编辑 按钮进入路由编辑功能。
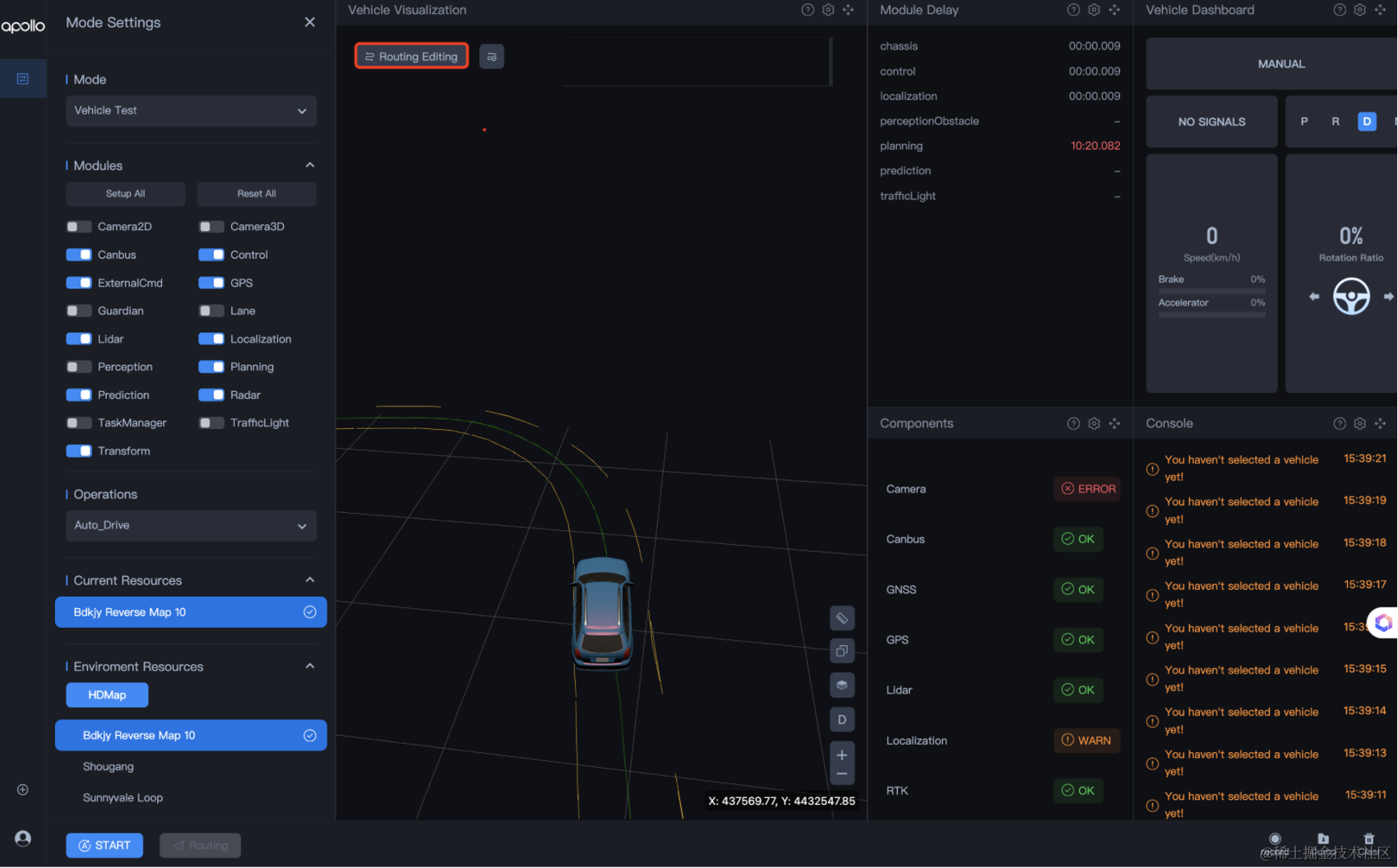
在面板左上角初始位置图标,在地图上单击设定初始位置。
注意:长按鼠标右键可以拖转移动地图位置。
单击左上角轨迹点图标,在地图上单击添加途经轨迹点。

单击 保存编辑 ,完成轨迹绘制。
单击 Routing/路由 按钮出现红色轨迹线。

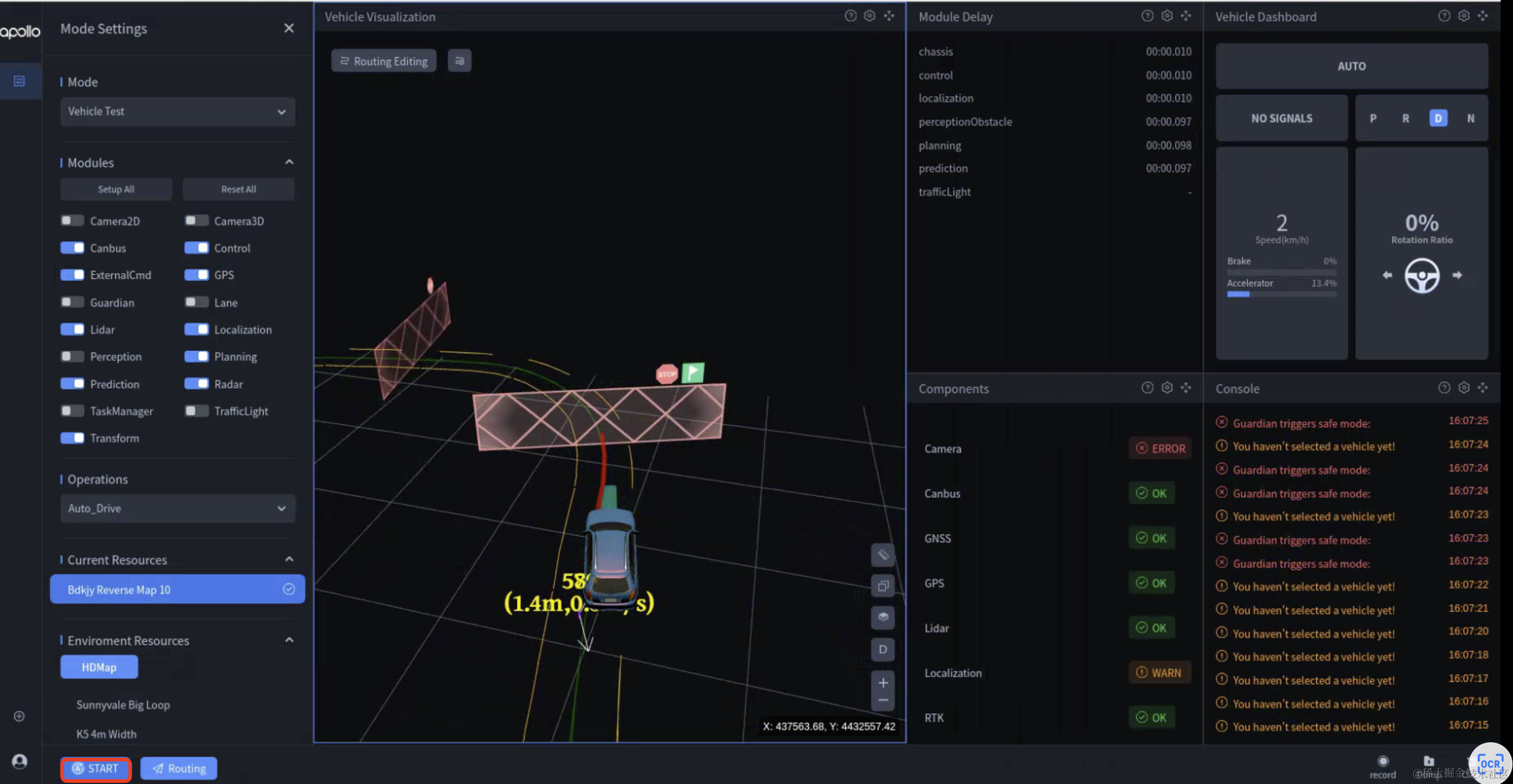
步骤二:启动自动驾驶
如果各模块正常工作,且规划效果也不错,将遥控器切换到自动驾驶状态。
在 DreamView+ 中,在操作底栏中,单击 START/启动 按钮,启动自动驾驶。
相关文章:
百度Apollo | 实车自动驾驶:感知、决策、执行的无缝融合
🎬 鸽芷咕:个人主页 🔥 个人专栏:《linux深造日志》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! ⛳️ 推荐 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下…...

DAY31:贪心算法入门455、53、376
理论基础 贪心算法的基本思路是通过局部最优从而达到全局最优,但是有时候局部最优并不一定导致全局最优,这样就需要动态规划的方法。但一部分题目是能通过贪心得到的。贪心的证明一般用到数学归纳法和反证法。在实际的问题中,没有统一的代码…...

LeetCode:376.摆动序列
个人主页:仍有未知等待探索-CSDN博客 专题分栏:算法_仍有未知等待探索的博客-CSDN博客 题目链接:376. 摆动序列 - 力扣(LeetCode) 一、题目 如果连续数字之间的差严格地在正数和负数之间交替,则数字序列称…...
Stable Diffusion插件Recolor实现黑白照片上色
今天跟大家分享一个使用Recolor插件通过SD实现老旧照片轻松变彩色,Recolor翻译过来的含义就是重上色,该模型可以保持图片的构图,它只会负责上色,图片不会发生任何变化。 一:插件下载地址 https://github.com/pkuliyi…...

Android 音频焦点管理
前言 前面写过一篇类似的文章,没写完,今天再详细描述一下。 Android音频焦点申请处理 音频焦点管理的意义 两个或两个以上的 Android 应用可同时向同一输出流播放音频。系统会将所有音频流混合在一起。虽然这是一项出色的技术,但却会给用…...
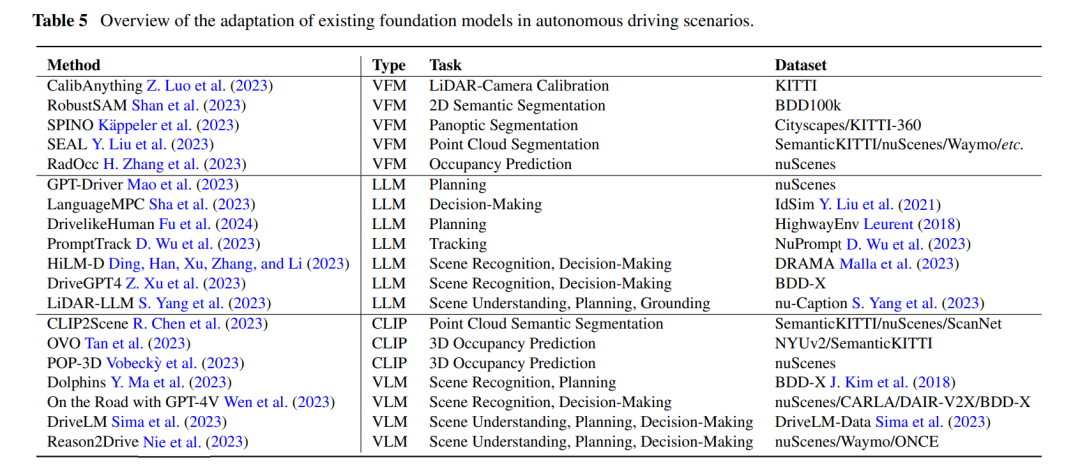
大模型+自动驾驶
论文:https://arxiv.org/pdf/2401.08045.pdf 大型基础模型的兴起,它们基于广泛的数据集进行训练,正在彻底改变人工智能领域的面貌。例如SAM、DALL-E2和GPT-4这样的模型通过提取复杂的模式,并在不同任务中有效地执行,从…...
openssl3.2 - 测试程序的学习 - test\aesgcmtest.c
文章目录 openssl3.2 - 测试程序的学习 - test\aesgcmtest.c概述笔记能学到的流程性内容END openssl3.2 - 测试程序的学习 - test\aesgcmtest.c 概述 openssl3.2 - 测试程序的学习 aesgcmtest.c 工程搭建时, 发现没有提供 test_get_options(), cleanup_tests(), 需要自己补上…...

C语言——操作符详解2
目录 0.过渡0.1 不创建临时变量,交换两数0.2 求整数转成二进制后1的总数 1.单目表达式2. 逗号表达式3. 下标访问[ ]、函数调用( )3.1 下标访问[ ]3.2 函数调用( ) 4. 结构体成员访问操作符4.1 结构体4.1.1 结构体的申明4.1.2 结构体变量的定义和初始化 4.2 结构体成…...

(免费领源码)java#Springboot#mysql旅游景点订票系统68524-计算机毕业设计项目选题推荐
摘 要 科技进步的飞速发展引起人们日常生活的巨大变化,电子信息技术的飞速发展使得电子信息技术的各个领域的应用水平得到普及和应用。信息时代的到来已成为不可阻挡的时尚潮流,人类发展的历史正进入一个新时代。在现实运用中,应用软件的工作…...
帝国cms7.5 支付升级优化版文库范文自动生成word/PDF文档付费复制下载带支付系统会员中心整站模板源码sitemap百度推送+安装教程
帝国cms7.5 支付升级优化版文库范文自动生成word/PDF文档付费复制下载带支付系统会员中心整站模板源码sitemap百度推送+安装教程 (购买本专栏可免费下载栏目内所有资源不受限制,持续发布中,需要注意的是,本专栏为批量下载专用,并无法保证某款源码或者插件绝对可用,介意不…...

【node】关于npm、yarn、npx的区别与使用
文章目录 npm (Node Package Manager):安装依赖运行脚本 npx:执行项目依赖中的命令 yarn:安装依赖eg.使用npx yarn install 的作用 npm (Node Package Manager): 用途: npm 是 Node.js 官方提供的包管理工具,用于安装、管理和分享 JavaScript 代码包。安…...

力扣0099——恢复二叉搜索树
恢复二叉搜索树 难度:中等 题目描述 给你二叉搜索树的根节点 root ,该树中的 恰好 两个节点的值被错误地交换。请在不改变其结构的情况下,恢复这棵树 。 示例1 输入: root [1,3,null,null,2] 输出:[3,1,null,nul…...
机器学习核心算法
目录 逻辑回归 算法原理 决策树 决策树算法概述 树的组成 决策树的训练与测试 切分特征 衡量标准--熵 信息增益 决策树构造实例 连续值问题解决 预剪枝方法 分类与回归问题解决 决策树解决分类问题步骤 决策树解决回归问题步骤 决策树代码实例 集成算法 Baggi…...

libjsoncpp 的编译和交叉编译
😁博客主页😁:🚀https://blog.csdn.net/wkd_007🚀 🤑博客内容🤑:🍭嵌入式开发、Linux、C语言、C、数据结构、音视频🍭 🤣本文内容🤣&a…...

【Unity美术】如何用3DsMax做一个水桶模型
👨💻个人主页:元宇宙-秩沅 👨💻 hallo 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅! 👨💻 本文由 秩沅 原创 👨💻 收录于专栏:Uni…...
如何用一根网线和51单片机做简单门禁[带破解器]
仓库:https://github.com/MartinxMax/Simple_Door 支持原创是您给我的最大动力… 原理 -基础设备代码程序- -Arduino爆破器程序 or 51爆破器程序- 任意选一个都可以用… —Arduino带TFT屏幕——— —51带LCD1602——— 基础设备的最大密码长度是0x7F,因为有一位…...

在 VUE 项目中,使用 Axios 请求数据时,提示跨域,该怎么解决?
在 VUE 项目开发时,遇到个问题,正常设置使用 Axios 库请求数据时,报错提示跨域问题。 那在生产坏境下,该去怎么解决呢? 其可以通过以下几种方式去尝试解决: 1、设置允许跨域请求的响应头 1.1 在响应头中…...
1.【Vue3】前端开发引入、Vue 简介
1. 前端开发引入 1.1 前端开发前置知识 通过之前的学习,已经通过 SpringBoot 和一些三方技术完成了大事件项目的后端开发。接下来开始学习大事件项目的前端开发,前端部分借助两个框架实现: Vue3(一个 JS 框架)基于 …...

一起学习ETCD系列——运维操作之etcdctl使用
文章目录 概要一、命令二、实操2.1、基本操作2.2、watch2.3、租约2.4、分布式锁2.5、角色2.6、用户2.7、认证2.8、集群 概要 本文主要用来总结ETCD客户端ctcdctl的命令操作,在运维过程中可能常常用到的。 一、命令 etcd工具 etcdctl官方命令示例 [roottest etcd…...

Spring Security 存储密码之 JDBC
Spring Security的JdbcDaoImpl实现了UserDetailsService接口,通过使用JDBC提供支持基于用户名和密码的身份验证。 JdbcUserDetailsManager扩展了JdbcDaoImpl,通过UserDetailsManager接口提供UserDetails的管理功能。 当Spring Security配置为接受用户名/密码进行身份验证时,…...

基于拓扑结构的多智能体协同系统:从概念到工程实践
1. 项目概述:从单体智能到协同网络的范式演进最近在开源社区里,一个名为agentopology/agentopology的项目引起了我的注意。乍一看这个名字,结合了“Agent”(智能体)和“Topology”(拓扑)&#x…...

Windows系统终极优化神器:Chris Titus Tech WinUtil完整使用指南
Windows系统终极优化神器:Chris Titus Tech WinUtil完整使用指南 【免费下载链接】winutil Chris Titus Techs Windows Utility - Install Programs, Tweaks, Fixes, and Updates 项目地址: https://gitcode.com/GitHub_Trending/wi/winutil 你是否曾为Windo…...

开源停车查询工具技术解析:从数据抓取到API服务的完整架构实践
1. 项目概述:一个开源停车查询工具的诞生最近在GitHub上看到一个挺有意思的项目,叫Harperbot/openclaw-parking-query。光看名字,你大概能猜到它和停车查询有关。没错,这是一个开源的停车信息查询工具,或者说ÿ…...

脚本的下一站:让自然语言直接成为可执行入口
原文链接: AI 小老六 几十年来,脚本的基本假设都没有变过:你要先写代码,再让机器执行。 哪怕是 shell 脚本这种相对轻量的形式,本质上仍然是把一组固定指令按顺序交给解释器。脚本作者负责把逻辑写死,执行…...

开源客户端工具设计:从API封装到健壮实现的工程实践
1. 项目概述:一个开源客户端工具的诞生与价值在开源世界里,我们经常会遇到一些功能强大但使用门槛较高的服务端项目。它们往往提供了核心的API或服务,但缺少一个能让普通用户或开发者快速上手、直观操作的“门面”。lotsoftick/openclaw_clie…...

基于RAG与本地化部署的Obsidian智能知识库助手实战指南
1. 项目概述:当知识管理遇上AI副驾驶如果你和我一样,常年泡在Obsidian这个知识管理的“第二大脑”里,那你一定对那种感觉不陌生:笔记越积越多,知识网络越来越复杂,但当你真正需要调用某个信息、串联某个想法…...

SAP S4后台表PRCD_ELEMENTS增量同步逻辑
PRCD_ELEMENTS本身没有创建或修改的时间戳,可采用下面的方式做增量同步: 1.SD模块有3个点分别增量同步 1)销售订单:通过VBAK-KNUMV关联PRCD_ELEMENTS-KNUMV,且PRCD_ELEMENTS-KAPPL V,按VBAK-ERDAT(新增)…...
)
基于主从博弈的电热综合能源系统动态定价与能量管理(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

COCO数据集实例解析:从JSON结构到YOLO格式的实战转换
1. COCO数据集JSON结构深度解析 第一次打开COCO数据集的JSON文件时,我完全被里面复杂的嵌套结构搞懵了。这个文件就像俄罗斯套娃,一层套着一层。经过多次实战踩坑,终于摸清了它的门道。COCO的标注文件主要包含五个关键部分,每个部…...

收藏!AI覆盖率94%?程序员别慌,读懂这份报告保住你的饭碗!
Anthropic报告显示AI在程序员领域的理论覆盖率高达94%,但现实替代率仅为33%。AI尚无法大规模取代白领,主要因输出结果需人类承担后果、效率问题及无法替代岗位。高学历者中,机械执行者面临最大威胁,而拥有决策力、策略思考及复杂流…...