华为产业链之车载激光雷达
一、智能汽车 NOA 加快普及,L3 上路利好智能感知硬件
1、感知层是 ADAS 最重要的一环

2、L3 上路利好智能感知硬件,华为自研 192 线激光雷达瞩目

3、激光雷达 L3 及以上级别自动驾驶不可省略的感知硬件


二、车载激光雷达技术梳理
1、定义与成像原理


2、按扫描方式分类



3、优缺点

4、在智能驾驶领域的应用


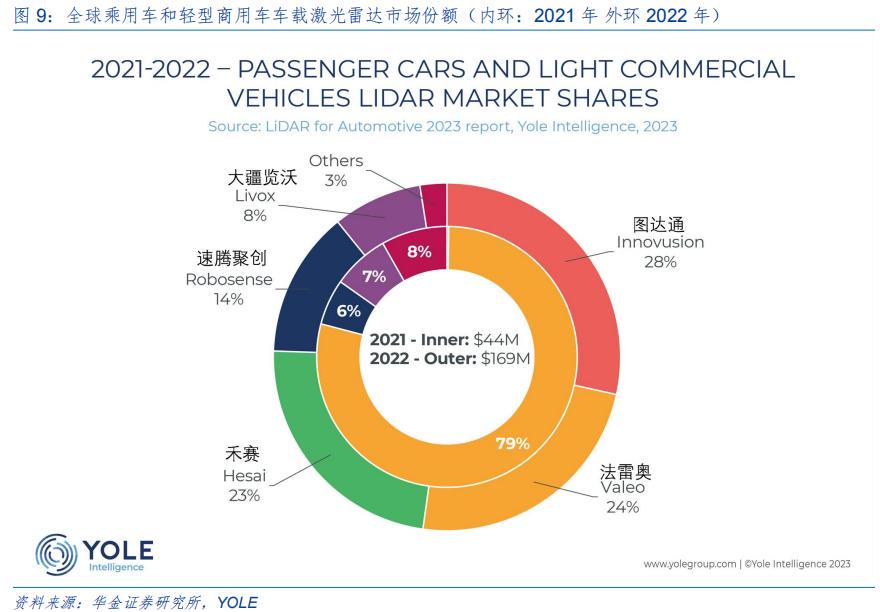
5、车载激光雷达厂商竞争格局
相关文章:
华为产业链之车载激光雷达
一、智能汽车 NOA 加快普及,L3 上路利好智能感知硬件 1、感知层是 ADAS 最重要的一环 先进驾驶辅助系统 (ADAS, Advanced driver-assistance system)分“感知层、决策层、执行层”三个层级,其中感知层是最重要的一环…...
和ToString())
java的Object类的hasCode()和ToString()
(1)hasCode解释 hashCode()是Object类中定义的方法,用于返回对象的哈希码值。哈希码值是一个整数,用于在哈希表等数据结构中快速定位对象。 在Java中,哈希码值的计算是基于对象的内存地址的。默认情况下,ha…...
判断一维数组和多元数组中的元素是否相等并输出键值key)
php数组算法(1)判断一维数组和多元数组中的元素是否相等并输出键值key
在php中,如何判断[1,0,1]和[ [0, 0, 0],//体质正常 [1, 0, 0],//气虚体质 [0, 1, 0],//血瘀体质 [0, 0, 1],//阴虚体质 [1, 1, 0],//气虚兼血瘀体质 [1, 0, 1],//气虚兼阴虚体质 [0, 1, 1],//血瘀兼阴虚体质 [1, 1, 1],//气虚兼血瘀兼阴虚体质 ];中的第n项相等&…...

已解决Error:AttributeError: module ‘numpy‘ has no attribute ‘float‘.
成功解决Error:AttributeError: module ‘numpy‘ has no attribute ‘float‘. 🌵文章目录🌵 🌳引言🌳🌳报错分析🌳🌳解决方案1:降低NumPy版本🌳ἳ…...
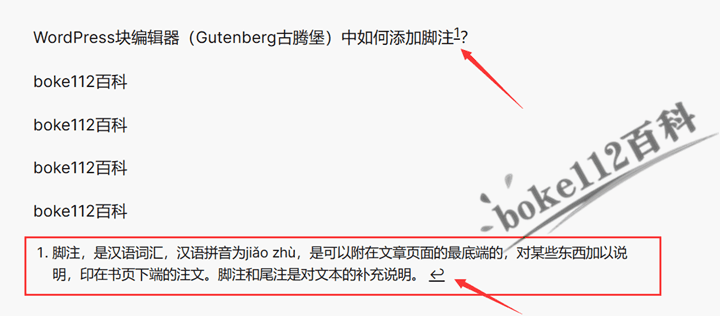
WordPress块编辑器(Gutenberg古腾堡)中如何添加脚注?
WordPress默认自带的块编辑器(Gutenberg古腾堡编辑器)本身就自带添加脚注功能,不过经典编辑器不行。如果想要在WordPress中添加更加专业的脚注,建议使用Modern Footnotes插件,具体介绍及使用请参考『WordPress站点如…...
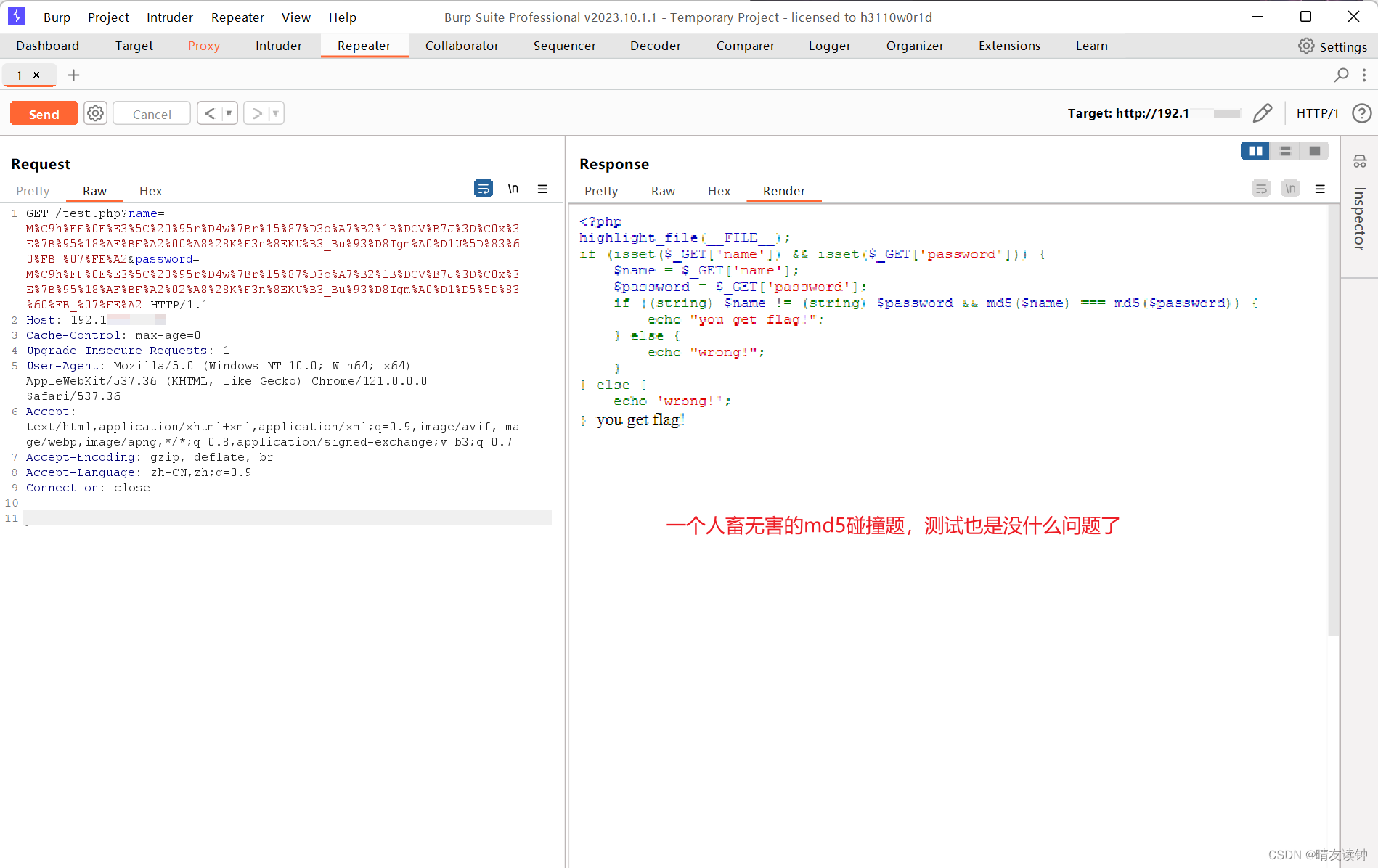
burpsuite怎么进行本地抓包?ctfer测试自搭建靶场必须学会!
自己搭建靶场测试题目是ctfer不可避免的环节,怎么用burp对本地回环即localhost进行抓包?笔者在本篇分享一下自己的解决经验。 笔者用的是Chrome浏览器,如果是火狐浏览器可以参考本篇:Burp Suite抓不到本地包/localhost包问题解决…...

VSCode Python调试运行:json编写
对于需要在命令行传参运行的项目,如果想要调试运行,则需要编写对应的launch.json文件这里记录一下json文件的编写格式: {"version": "0.2.0","configurations": [{"python": "/data/xxx/minic…...
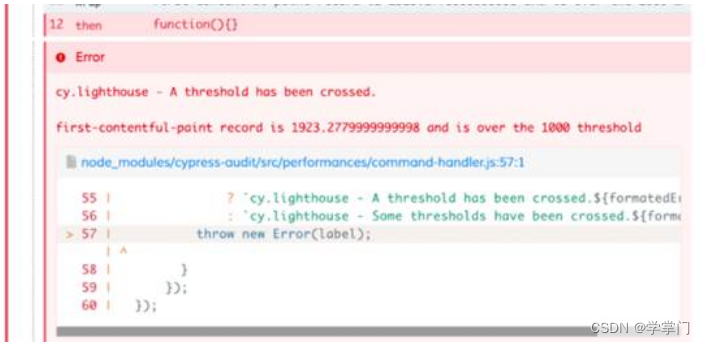
自动化Web页面性能测试介绍
随着越来越多的用户使用移动设备访问 Web 应用,使得 Web 应用需要支持一些性能并不是很好的移动设备。为了度量和测试 Web 应用是不是在高复杂度的情况下,页面性能能满足用户的需求。 同时,随着 Web 应用的空前发展,前端业务逐渐…...

可视化 | 【d3】力导向关系图优化(搜索+刷新)
文章目录 📚优化内容📚html和css优化🐇搜索框部分🐇刷新按钮部分 📚js🐇搜索框部分🐇刷新部分 前期回顾:【d3】力导图优化,本文主要是基于上篇代码,以代码段添…...

2024.1.26力扣每日一题——计算 K 置位下标对应元素的和
2024.1.26 题目来源我的题解方法一 位运算统计二进制数中1的个数方法二 官方的一种优化计算二进制中1的个数的方法 题目来源 力扣每日一题;题序:2859 我的题解 方法一 位运算统计二进制数中1的个数 对于每一个位置i都去计算i对应的二进制数中1的个数 …...
:获取或设置分类等级列表)
R语言【taxlist】——levels():获取或设置分类等级列表
Package taxlist version 0.2.4 Description 分类层次结构可以设置为 taxlist 对象中的级别,按从低到高的顺序排列。 在 taxlist 对象中为特定分类概念添加分类级别。此外,概念限制的变化可能涉及其分类层次结构的变化。 Usage levels(x)## S3 method…...

单元测试——题目十三
目录 题目要求: 定义类 测试类 题目要求: 根据输入的三条边值判断能组成何种三角形。三条边为变量a、b、c,范围为1≤边值≤10,不在范围内,提示“输入边值不在范围内”。不满足任意两边之和必须大于第三边,提示“输入边值不能组成三角形”。输入边值能组成三角形,只有…...
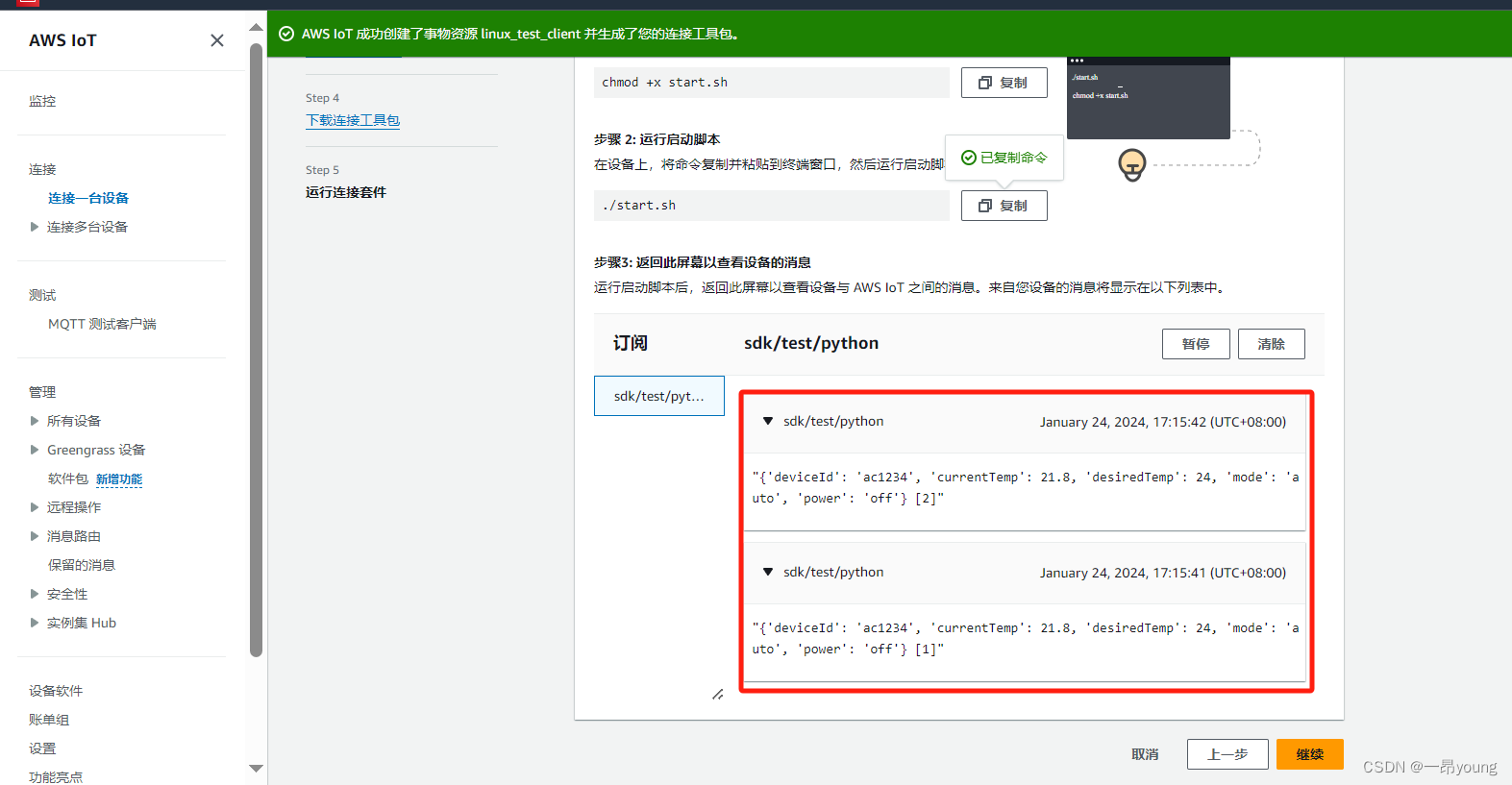
使用Linux SDK客户端向AWS Iot发送数据
参考链接: https://ap-southeast-1.console.aws.amazon.com/iot/home?regionap-southeast-1#/test 此篇文章用于测试,使用Linux SDK客户端向AWS Iot发送数据,准备环境如下: 1、客户端环境准备 1.1 客户端操作系统 虚拟机一台…...

1.27学习总结
今天做了些队列的题: 1.逛画展(单调队列) 2.打印队列 Printer Queue(优先队列) 3.[NOIP2010 提高组] 机器翻译(模拟队列) 4.求m区间内的最小值(单调队列板子题) 5.日志统计(滑动窗口,双指针) 总结一下&…...

【算法专题】二分查找(进阶)
📑前言 本文主要是二分查找(进阶)的文章,如果有什么需要改进的地方还请大佬指出⛺️ 🎬作者简介:大家好,我是青衿🥇 ☁️博客首页:CSDN主页放风讲故事 🌄每日…...

开源项目对于新用户和初学者适合哪些工作
目录 一、阅读和理解文档 二、报告问题 三、测试和验证修复 四、编写和更新文档 五、简单的代码更改和修复 六、参与社区讨论 开源项目对于新用户和初学者来说,提供了宝贵的学习和实践机会。以下是一些适合新用户和初学者参与的工作: 一、阅读和理…...
linux中配置文件目录为什么用etc来命名
在早期的 Unix 系统中,/etc 目录的名称确实来源于单词 “etcetera” 的缩写,最初意味着 “其他”,用来存放杂项或者不属于其他特定目录的文件。然而,随着时间的推移,/etc 目录的用途逐渐演变并专门化。 在现代的 Linux…...
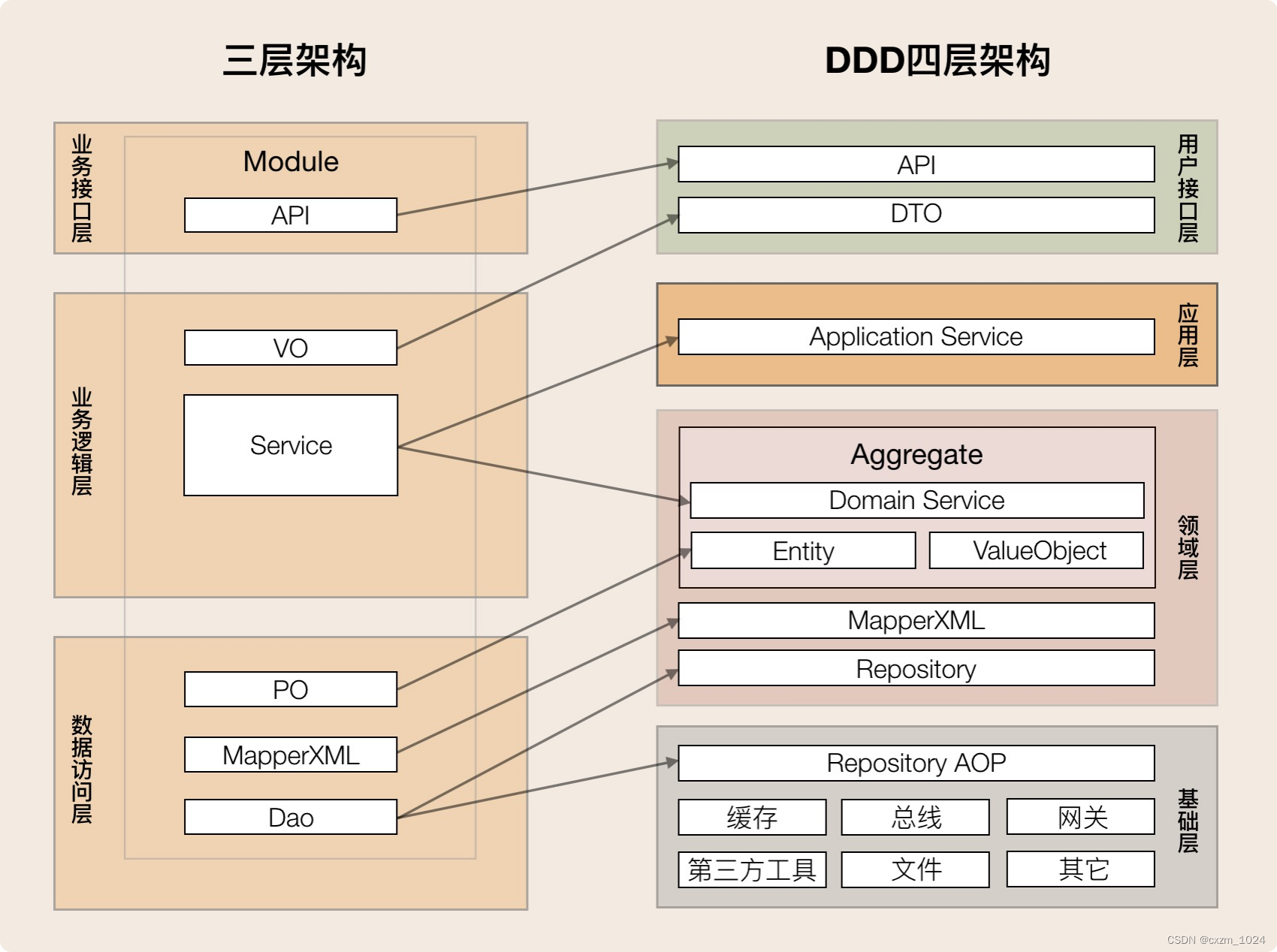
06.领域驱动设计:使用DDD分层架构,可以有效降低层与层之间的依赖
目录 1、概述 2、什么是DDD分层架构 1.用户接口层 2.应用层 3.领域层 4.基础层 3、DDD分层架构最重要的原则是什么 4、DDD分层架构如何推动架构演进 1.微服务架构的演进 2.微服务内服务的演进 5、三层架构如何演进到DDD分层架构 我们该怎样转向DDD分层架构 6、总结…...

HCIA-Datacom实验指导手册:3.2 实验二:生成树基础实验
HCIA-Datacom实验指导手册:3.2 实验二:生成树基础实验 一、实验介绍:二、实验拓扑:三、实验目的:四、配置步骤:步骤 1 掌握启用和禁用 STP/RSTP 的方法步骤 2 掌握修改交换机 STP 模式的方法步骤 3 掌握修改桥优先级,控制根桥选举的方法步骤 4 掌握修改端口优先级,控制…...

WPF的ViewBox控件
在WPF中,ViewBox是一个用于缩放和调整其子元素大小的容器控件。它可以根据可用空间自动调整子元素的大小,以使其适应ViewBox的边界。这使得在不同尺寸的窗口或布局中保持元素的比例和缩放变得更加容易。 ViewBox具有以下重要属性: Stretch&…...

FCEUX终极指南:从怀旧游戏到专业调试的完整NES模拟器教程
FCEUX终极指南:从怀旧游戏到专业调试的完整NES模拟器教程 【免费下载链接】fceux FCEUX, a NES Emulator 项目地址: https://gitcode.com/gh_mirrors/fc/fceux FCEUX是一款功能强大的开源NES模拟器,让你在现代电脑上完美重温经典红白机游戏。无论…...

硬件答辩问题总结
一、电源纹波是什么,为什么LDO的小,DCDC的大1.电源纹波电源纹波 是指直流电源输出电压上叠加的 交流波动成分,表现为电压在理想直流值附近上下波动。2.LDO 纹波小原理LDO 内部是一个 调整管(可变电阻) 串联在输入和输出…...

别再盲跑了!手把手教你用Arduino Zero在IDE 2.0里设置断点单步调试
告别盲跑时代:Arduino Zero与IDE 2.0的源码级调试实战指南 当你的Arduino项目逻辑越来越复杂,仅靠串口打印调试就像在迷宫里摸黑前行——直到遇见Arduino Zero与IDE 2.0的调试组合。本文将揭示如何用这套工具实现 源码级精准调试 ,即使你手…...

亚马逊 Rufus 关停,Alexa 正式上线:卖家必须读懂的6条新规则
2026年5月13日,亚马逊官方正式宣布,下线Rufus,推出全新AI购物助手:Alexa for Shopping。但是,这不是粗暴地直接下线 Rufus,而是一次购物AI底层架构的重组 —— 将 Rufus 的商品专长 与 Alexa的用户理解力&a…...
:3类高危使用场景+2个监管红线预警)
Claude SWOT分析(内部风控文档流出版):3类高危使用场景+2个监管红线预警
更多请点击: https://intelliparadigm.com 第一章:Claude SWOT分析(内部风控文档流出版):3类高危使用场景2个监管红线预警 高危使用场景识别 在企业级AI应用中,Claude模型若未经严格风控适配,…...

真可用!美团数字人模型开源,MV、电商等统统拿下
美团开源的数字人视频生成框架 LongCat-Video-Avatar 刚刚更新到 1.5 版本。是真能用。这版更新把音频编码器换了,推理步数砍到8步,在770人、13240条主观评分的大规模评测里,雷达图面积全面领先。音频编码器换血,8步出图LongCat-V…...

OpenRASP原理与实战:Java应用层实时防护技术详解
1. 为什么我宁愿花三天部署OpenRASP,也不愿再写第五个自定义WAF过滤器去年冬天,我在给一家做在线教育SaaS平台做安全加固时,连续踩了三个坑:第一次用NginxLua写了套SQL注入规则,结果学生提交的“SELECT * FROM courses…...

Visual C++运行库一键安装指南:彻底解决Windows应用依赖问题
Visual C运行库一键安装指南:彻底解决Windows应用依赖问题 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 你是否曾经遇到过打开软件时弹出"缺少…...

音乐解锁工具:让加密音乐文件在任何设备自由播放
音乐解锁工具:让加密音乐文件在任何设备自由播放 【免费下载链接】unlock-music 在浏览器中解锁加密的音乐文件。原仓库: 1. https://github.com/unlock-music/unlock-music ;2. https://git.unlock-music.dev/um/web 项目地址: https://gi…...

为开源项目OpenClaw配置Taotoken作为其大模型服务后端
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为开源项目OpenClaw配置Taotoken作为其大模型服务后端 OpenClaw 是一个功能强大的开源工具,它允许开发者便捷地调用各类…...