【C++】实现红黑树
目录
- 一、认识红黑树
- 1.1 概念
- 1.2 定义
- 二、实现红黑树
- 2.1 插入
- 2.2 与AVL树对比
一、认识红黑树
1.1 概念
红黑树是一个二叉搜索树,与AVL树相比,红黑树不再使用平衡因子来控制树的左右子树高度差,而是用颜色来控制平衡,颜色为红色或者黑色。控制任意一条从根到叶子节点的路径的节点颜色,就可以确保没有一条路径会比其他路径长出俩倍,因而是接近平衡的。

红黑树的规则:
- 根节点是黑色的
- 不能有连续的红色节点
- 从某个节点出发,每条路径上的黑色节点的数量相同
1.2 定义
红黑树也是三叉链结构(左指针、右指针和父亲指针),有一个新的存储位来记录节点的颜色,这里实现的红黑树是kv模型。
enum Colour
{RED,//红色BLACK//黑色
};template<class K, class V>
struct RBTreeNode
{RBTreeNode<K, V>* _left;RBTreeNode<K, V>* _right;RBTreeNode<K, V>* _parent;pair<K, V> _kv;Colour _col;RBTreeNode(const pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr),_kv(kv),_col(RED)//默认的新节点都是红色的{}
};
二、实现红黑树
2.1 插入
红黑树的插入的与普通二叉搜索树的插入逻辑是一样的,不同的是插入新节点后要进行变色处理,符合前面的规则才行。
红黑树的插入一共分为两大类:
- 新插入的节点的父节点是黑色的,插入结束
- 新插入的节点的父节点是红色的,要变色处理
也就是说要看新插入的节点的父节点的颜色来确定是否本次插入结束。但是有个问题,新插入的节点说什么颜色的?其实看图就可以知道,插入的新节点必须是红色的,因为如果插入的是黑色节点,那么必然会导致每条路径上的黑色节点数量不相同,违反规则。
接下来看红黑树插入节点时是怎样变色的:
首先按照前面插入的两大类,如果插入节点的父节点是黑色的,就不需要进入变色调整;反之,如果插入节点的父节点存在且是红色的,说明此时有连续的红色节点,要变色处理。
这里需要定义几个节点的名字,方便叙述和画图:
- c(cur)——当前新插入的节点
- p(parent)——插入节点的父节点
- g(grandfather)——父节点的父节点
- u(uncle)——叔叔节点,父节点的另一边的节点
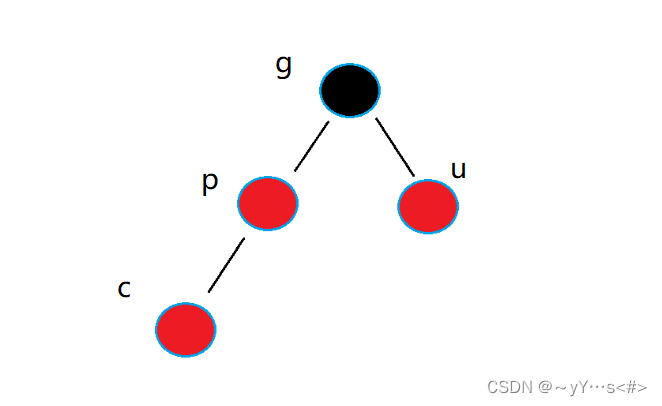
这4个节点主要看叔叔节点,根据叔叔节点分为两种情况。
情况一:叔叔存在且为红
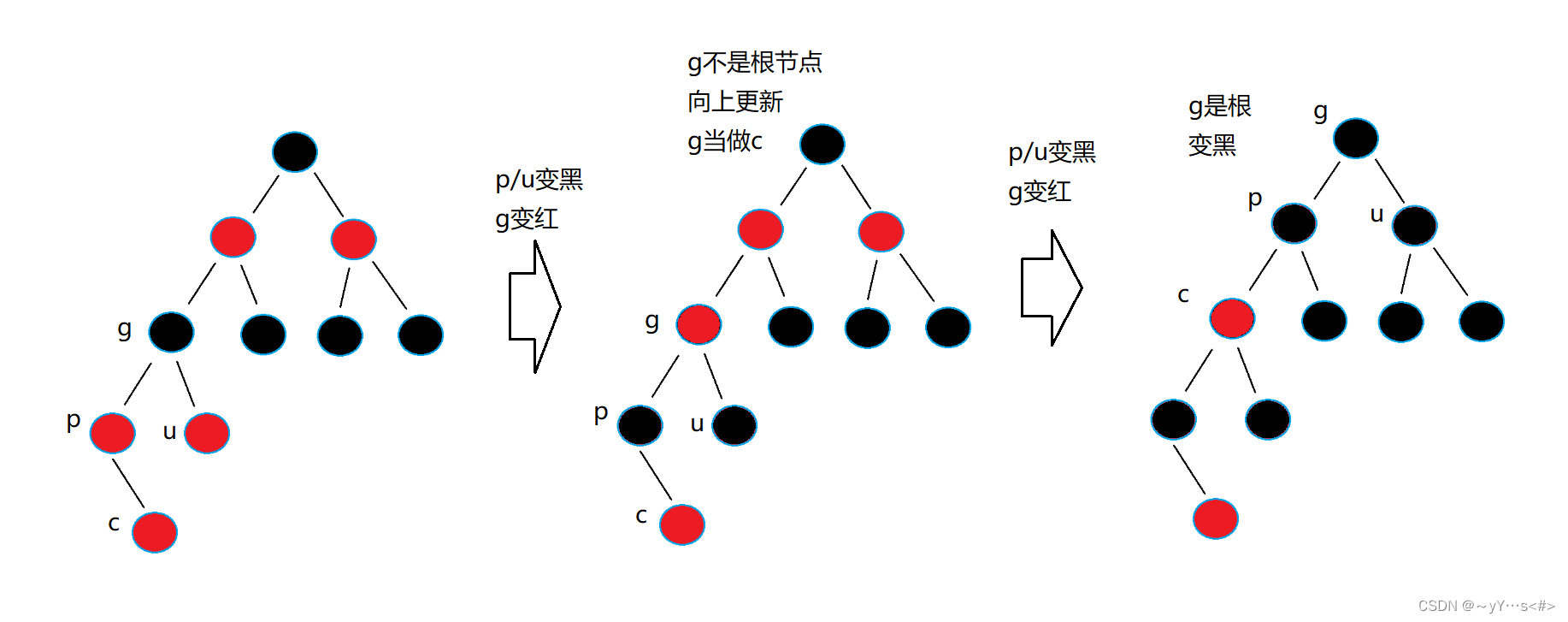
p和u要变成黑色,g变成红色。如果g不是根节点,要向上更新,把g当成c;如果g是根节点,要把g变成黑色的,因为根节点必须是黑的。
1️⃣g是根节点
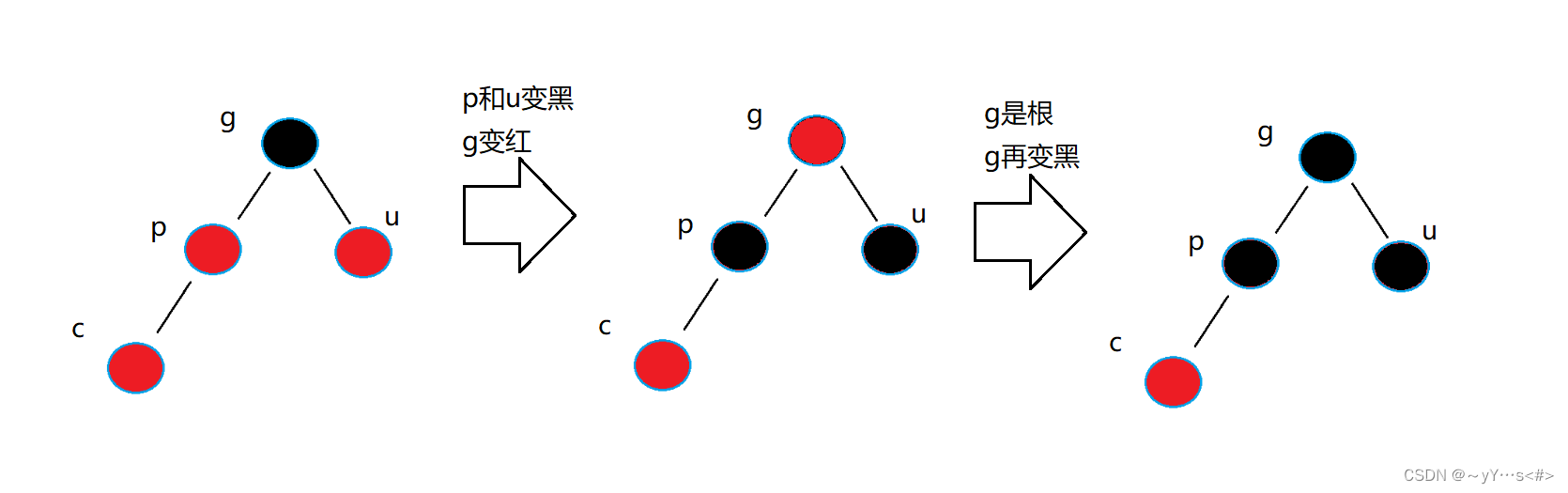
注意:不管p或者u是g的左边还是右边都是一样的,c在p的左边/右边都是一样的操作,不影响。
2️⃣g不是根节点
情况二:叔叔不存在或者叔叔存在且为黑
情况二里面又有4种变色方式(其实与其说是变色方式,不如直接说是旋转方式不同然后根据旋转情况来变色)
1️⃣p是g的左孩子,c是p的左孩子
进行右单旋,p变黑,g变红
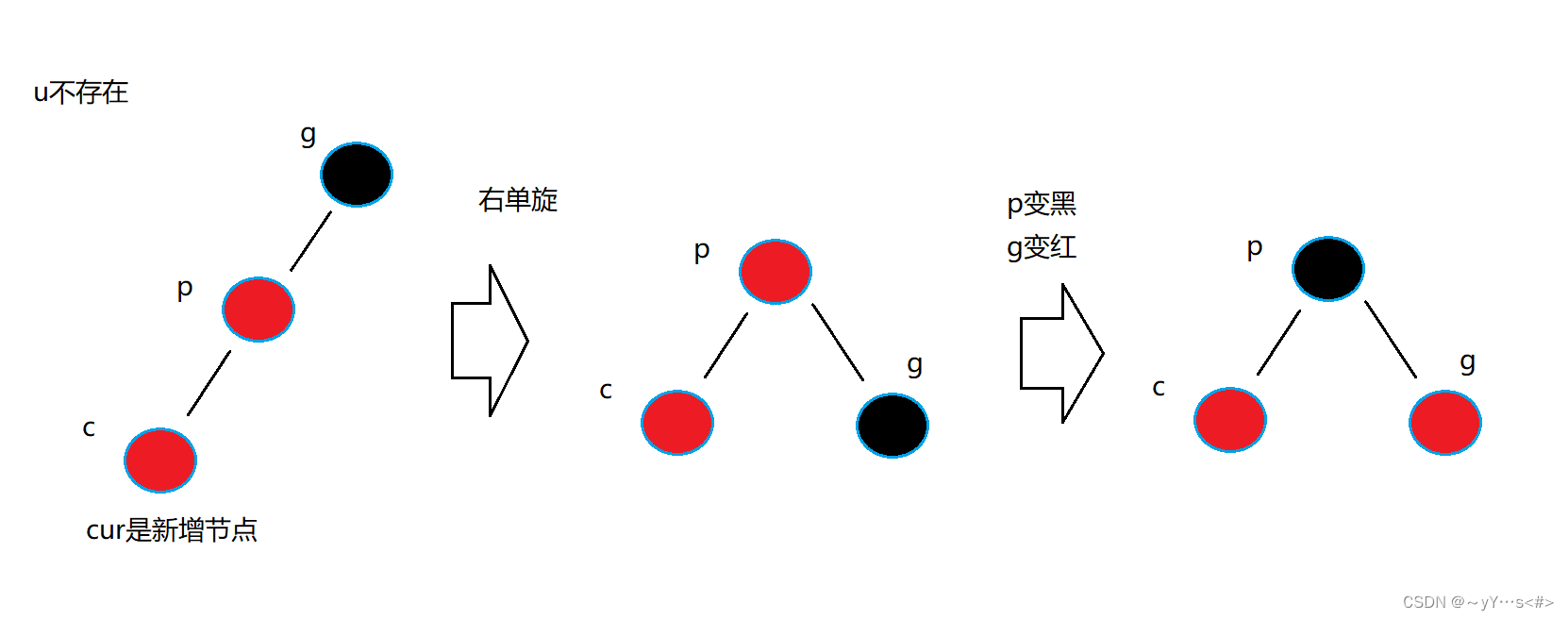
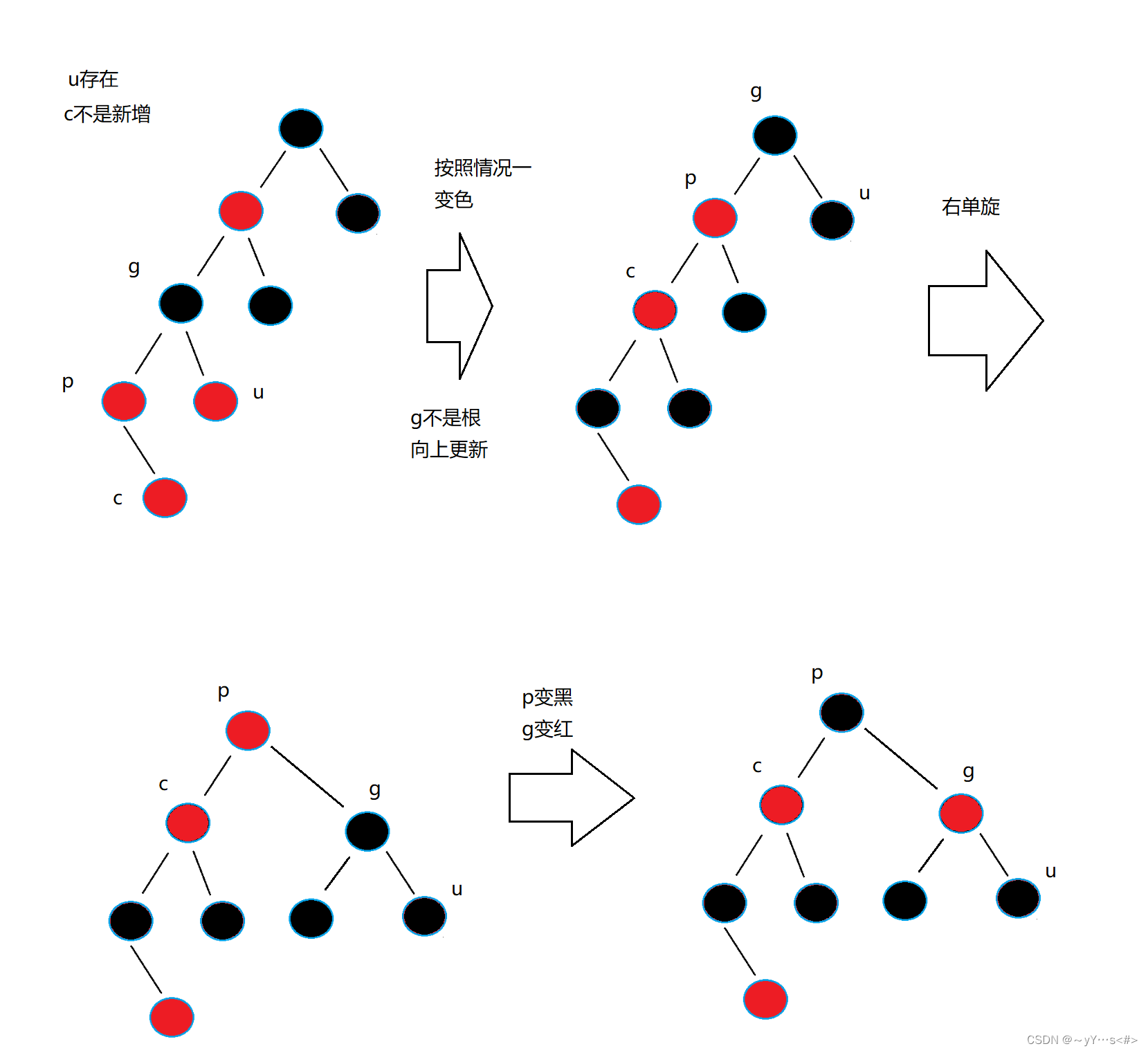
上图的c不是新增,表示的是当它的叔叔节点u存在且为黑时的c不是新增。
注意:
这里u存在或者不存在也有两种情况,第一张图的c是新增的节点,u必然是不存在的,如果存在,会导致每条路径的黑色节点数量不相同;同理,第二张图的c刚开始是黑色的节点,它有自己的子树,是通过后面的向上变色处理才变红的,所以第二张图的u是必须存在的。总之一句话,u存不存在要符合规则
后面就以u不存在的情况处理
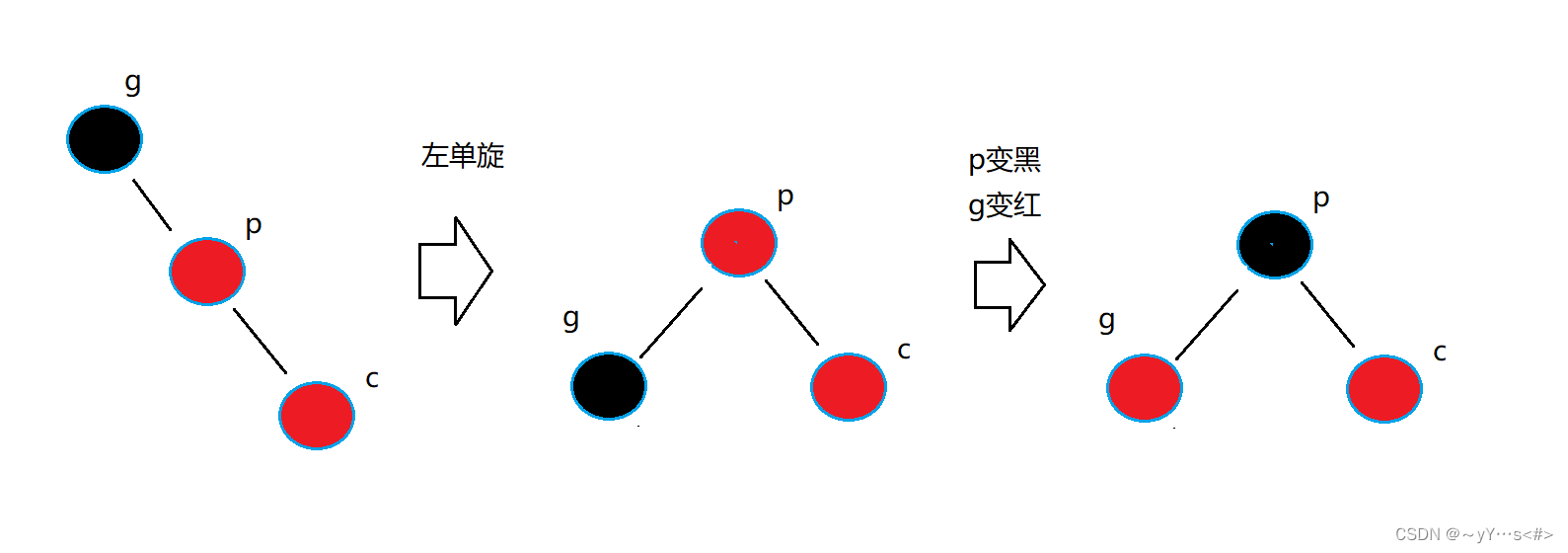
2️⃣p是g的右孩子,c是p的右孩子
进行左单旋,p变黑,g变红
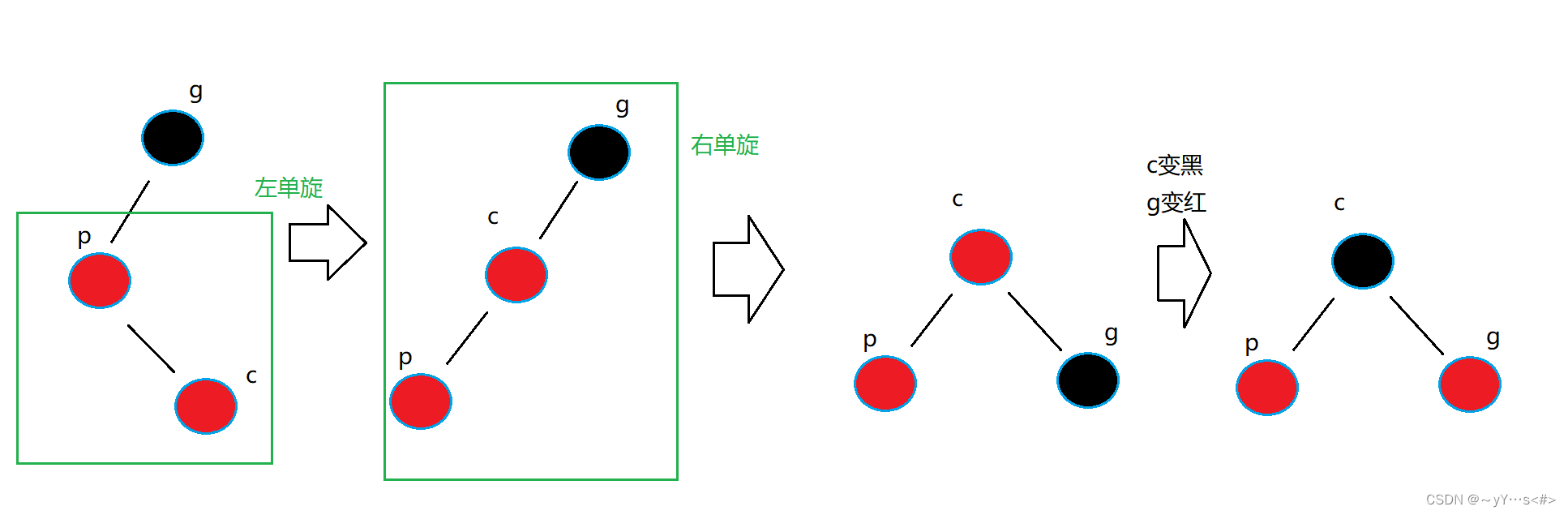
3️⃣p是g的左孩子,c是p的右孩子
先左单旋§,再右单旋(g),g变红,c变黑
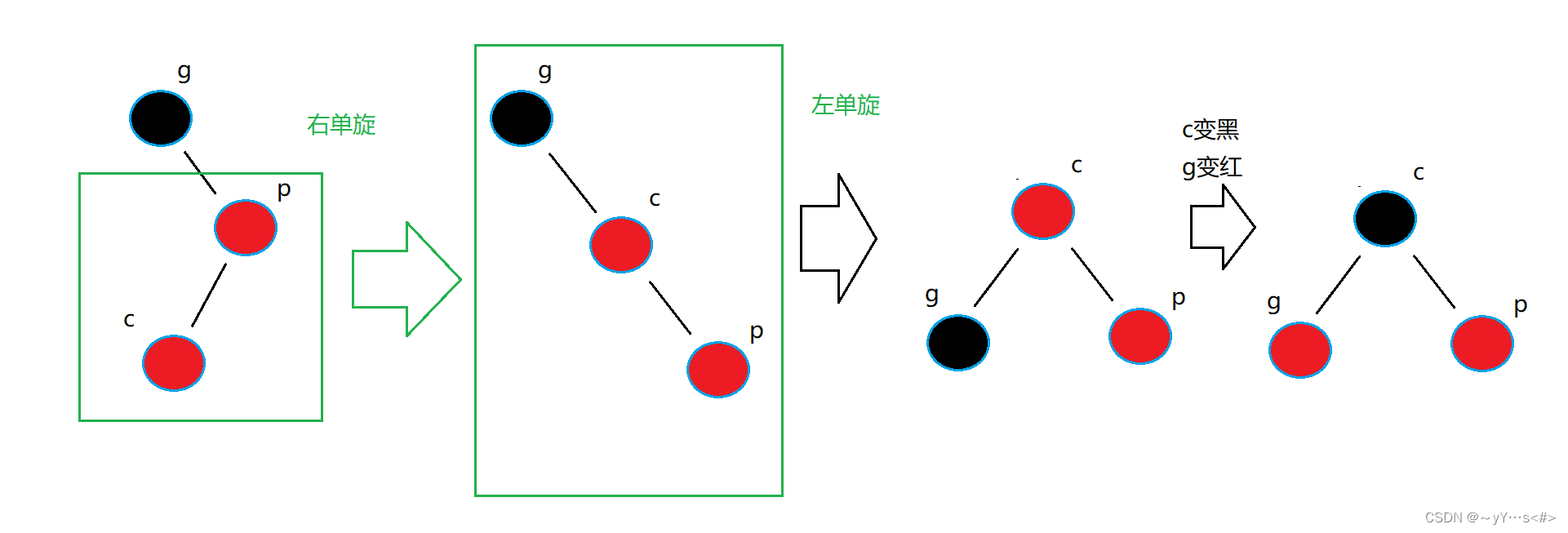
4️⃣p是g的右孩子,c是p的左孩子
先右单旋§,再左单旋(g),g变红,c变黑
代码:
//插入
bool Insert(const pair<K, V>& kv)
{//为空if (_root == nullptr){_root = new Node(kv);_root->_col = BLACK;//根节点都是黑色的,特殊处理return true;}//非空Node* cur = _root;Node* parent = nullptr;while (cur){if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{return false;//插入节点不能重复}}//插入新节点cur = new Node(kv);//红色的if (parent->_kv.first < kv.first){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;//调整颜色while (parent && parent->_col == RED){Node* grandfather = parent->_parent;//爷爷节点//父节点在爷爷节点的左边,那么叔叔节点在右边if (parent == grandfather->_left){Node* uncle = grandfather->_right;//情况一:叔叔存在且为红if (uncle && uncle->_col == RED){grandfather->_col = RED;uncle->_col = parent->_col = BLACK;cur = grandfather;//爷爷不是根,向上更新parent = cur->_parent;}//情况二:叔叔不存在/存在且为黑else{//单旋if (cur == parent->_left){RotateR(grandfather);//右单旋parent->_col = BLACK;//变色grandfather->_col = RED;}//左右双旋 // cur == parent->_rightelse{RotateL(parent);//先左单旋RotateR(grandfather);//再右单旋grandfather->_col = RED;//变色cur->_col = BLACK;}}}else//父节点在右边,叔叔在左边{Node* uncle = grandfather->_left;//情况一:叔叔存在且为红if (uncle && uncle->_col == RED){grandfather->_col = RED;uncle->_col = parent->_col = BLACK;cur = grandfather;//爷爷不是根,向上更新parent = cur->_parent;}//情况二:叔叔不存在/存在且为黑else{//单旋if (cur == parent->_right){RotateL(grandfather);//左单旋parent->_col = BLACK;//变色grandfather->_col = RED;}//右左双旋 // cur == parent->_leftelse{RotateR(parent);//先右单旋RotateL(grandfather);//再左单旋grandfather->_col = RED;//变色cur->_col = BLACK;}break;//经过情况二后跳出}}}_root->_col = BLACK;//统一处理,根必须是黑的return true;
}//左单旋
void RotateL(Node* parent)
{RotateSize++;Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;//不为空if (subRL){subRL->_parent = parent;}subR->_left = parent;Node* ppnode = parent->_parent;parent->_parent = subR;//处理parent如果为根if (parent == _root){_root = subR;subR->_parent = nullptr;}//不为根,处理与ppnode的连接else{if (ppnode->_left == parent){ppnode->_left = subR;}else{ppnode->_right = subR;}subR->_parent = ppnode;}
}//右单旋
void RotateR(Node* parent)
{RotateSize++;Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;//不为空if (subLR){subLR->_parent = parent;}subL->_right = parent;Node* ppnode = parent->_parent;parent->_parent = subL;if (parent == _root){_root = subL;subL->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subL;}else{ppnode->_right = subL;}subL->_parent = ppnode;}
}
2.2 与AVL树对比
红黑树与AVL树都是平衡二叉树,那为什么现实中绝大部分是使用红黑树,很少使用AVL树?下面我们来作数据对比,从两者的旋转次数、插入时间、平衡状态和高度来作分析。
测试代码:
RBTree<int, int> t1;
AVLTree<int, int> t2;const int N = 10000000;
vector<int> v;
v.reserve(N);
srand(time(0));for (size_t i = 0; i < N; i++)
{v.push_back(rand() + i);
}size_t begin1 = clock();
for (auto e : v)
{t1.Insert(make_pair(e, e));
}
size_t end1 = clock();size_t begin2 = clock();
for (auto e : v)
{t2.Insert(make_pair(e, e));
}
size_t end2 = clock();
//旋转次数
cout << "RBTree RoateSize:" << t1.getRotateSize() << endl;
cout << "AVLTree RoateSize:" << t2.getRotateSize() << endl;
//插入时间
cout << "RBTree Insert:" << end1 - begin1 << endl;
cout << "AVLTree Insert:" << end2 - begin2 << endl;
//平衡状态
cout << "RBTree IsBalance:" << t1.IsBalance() << endl;
cout << "AVLTree IsBalance:" << t2.IsBalance() << endl;
//树的高度
cout << "RBTree Height:" << t1.Height() << endl;
cout << "AVLTree Height:" << t2.Height() << endl;
//树的节点个数
cout << "RBTree Size:" << t1.Size() << endl;
cout << "AVLTree Size:" << t2.Size() << endl;
插入一千万个数据,运行结果:
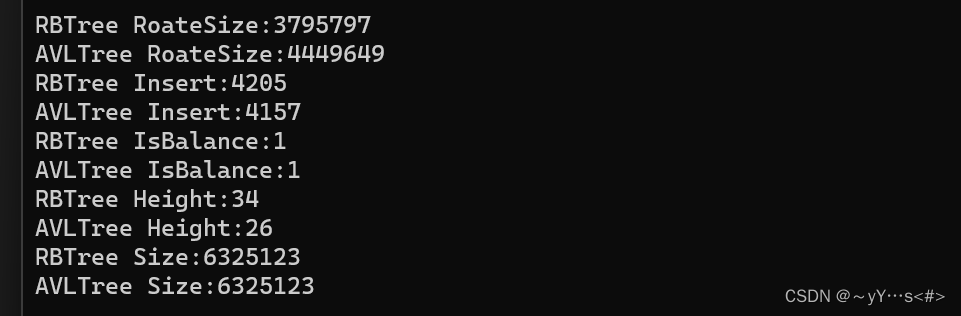
可以发现,红黑树的旋转次数比AVL树少,插入时间相差不大,两种树都是平衡的,红黑树的高度略高一些。
总结:
由于高度上红黑树不会高出多少,所以搜索效率影响不大。从树的高度可知,AVL树是极致追求平衡的,所以要频繁的进行旋转,这也导致旋转次数明显比红黑树多,因此在旋转上开销较大,不及红黑树的性能更优越些,同时红黑树实现比较简单,所以实际运用中红黑树更多。
相关文章:
【C++】实现红黑树
目录 一、认识红黑树1.1 概念1.2 定义 二、实现红黑树2.1 插入2.2 与AVL树对比 一、认识红黑树 1.1 概念 红黑树是一个二叉搜索树,与AVL树相比,红黑树不再使用平衡因子来控制树的左右子树高度差,而是用颜色来控制平衡,颜色为红色…...
)
爬虫(六)
复习回顾: 01.浏览器一个网页的加载全过程1. 服务器端渲染html的内容和数据在服务器进行融合.在浏览器端看到的页面源代码中. 有你需要的数据2. 客户端(浏览器)渲染html的内容和数据进行融合是发生在你的浏览器上的.这个过程一般通过脚本来完成(javascript)我们通过浏览器可以…...

最长连续序列 - LeetCode 热题 3
大家好!我是曾续缘💝 今天是《LeetCode 热题 100》系列 发车第 3 天 哈希第 3 题 ❤️点赞 👍 收藏 ⭐再看,养成习惯 最长连续序列 给定一个未排序的整数数组 nums ,找出数字连续的最长序列(不要求序列元素…...
运营模型—RFM 模型
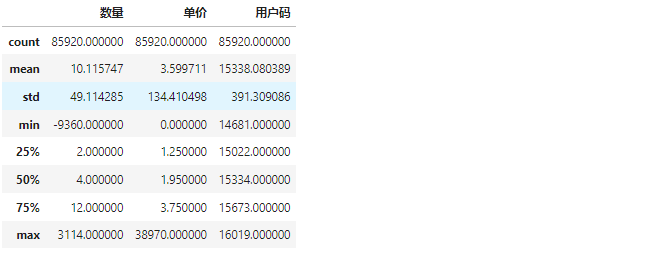
运营模型—RFM 模型 RFM 是什么其实我们前面的文章介绍过,这里我们不再赘述,可以参考运营数据分析模型—用户分层分析,今天我们要做的事情是如何落地RFM 模型 我们的数据如下,现在我们就开始进行数据处理 数据预处理 因为数据预处理没有一个固定的套路,都是根据数据的实…...
YOLOv9|加入2023Gold YOLO中的GD机制!遥遥领先!
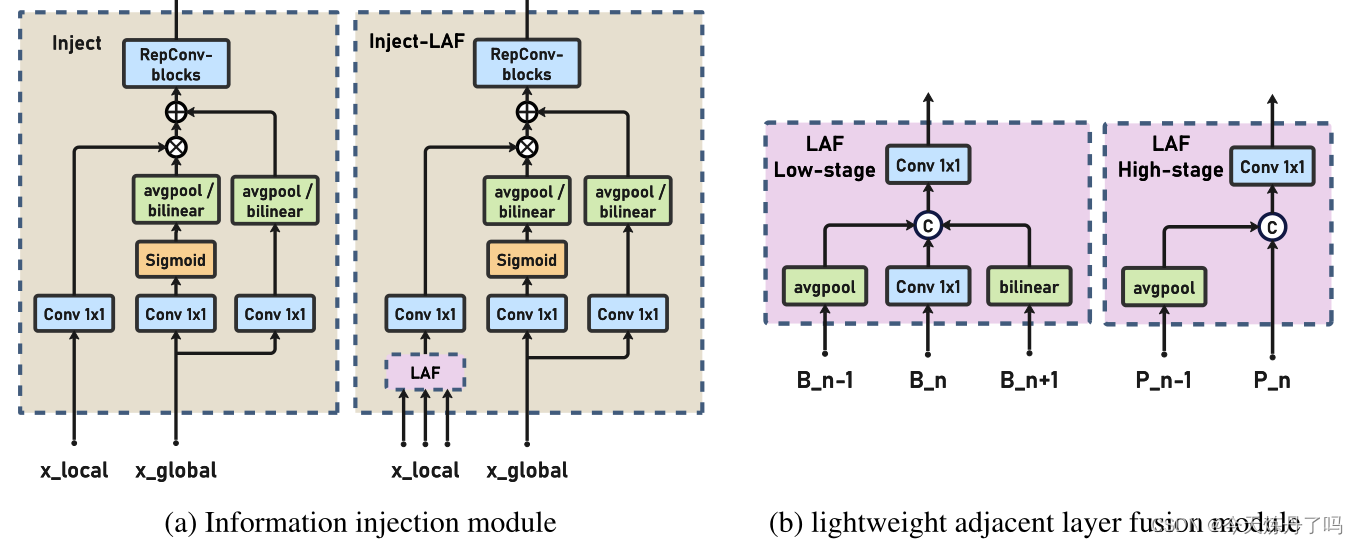
专栏介绍:YOLOv9改进系列 | 包含深度学习最新创新,助力高效涨点!!! 一、Gold YOLO摘要 在过去的几年里,YOLO系列模型已经成为实时目标检测领域的领先方法。许多研究通过修改体系结构、增加数据和设计新的损…...
WRF模型运行教程(ububtu系统)--III.运行WRF模型(官网案例)
零、创建DATA目录 # 1.创建一个DATA目录用于存放数据(一般为fnl数据,放在Build_WRF目录下)。 mkdir DATA # 2.进入 DATA cd DATA 一、WPS预处理 在模拟之前先确定模拟域(即模拟范围),并进行数据预处理(…...
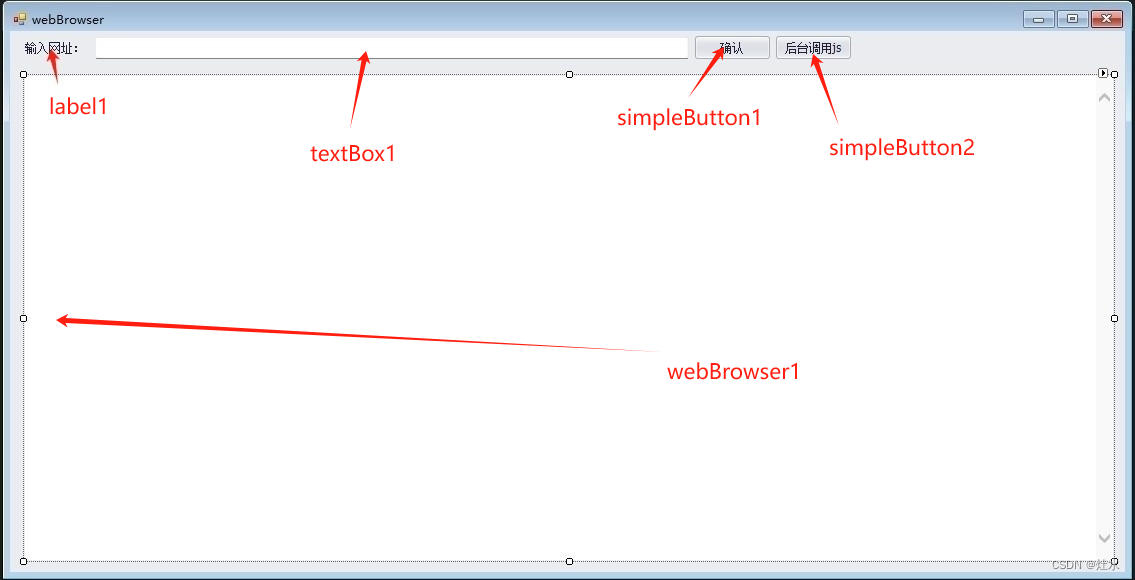
html和winform webBrowser控件交互并播放视频(包含转码)
1、 为了使网页能够与winform交互 将com的可访问性设置为真 [System.Security.Permissions.PermissionSet(System.Security.Permissions.SecurityAction.Demand, Name "FullTrust")][System.Runtime.InteropServices.ComVisibleAttribute(true)] 2、在webBrow…...
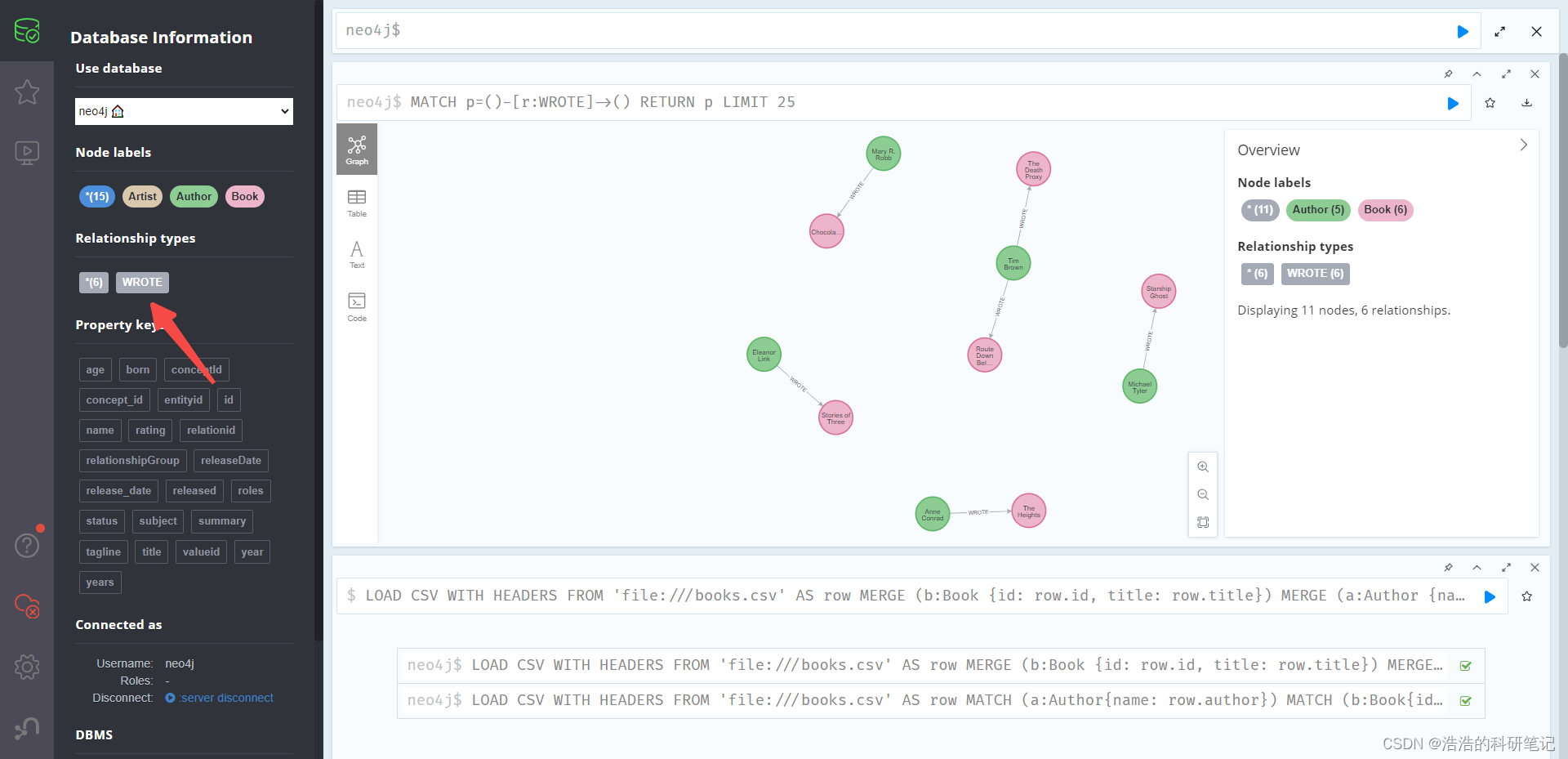
Neo4j 批量导入数据 从官方文档学习LOAD CSV 命令 小白可食用版
学习LOAD CSV🚀 在使用Neo4j进行大量数据导入的时候,发现如果用代码自动一行一行的导入效率过低,因此明白了为什么需要用到批量导入功能,在Neo4j中允许批量导入CSV文件格式,刚开始从网上的中看了各种半残的博客或者视频…...
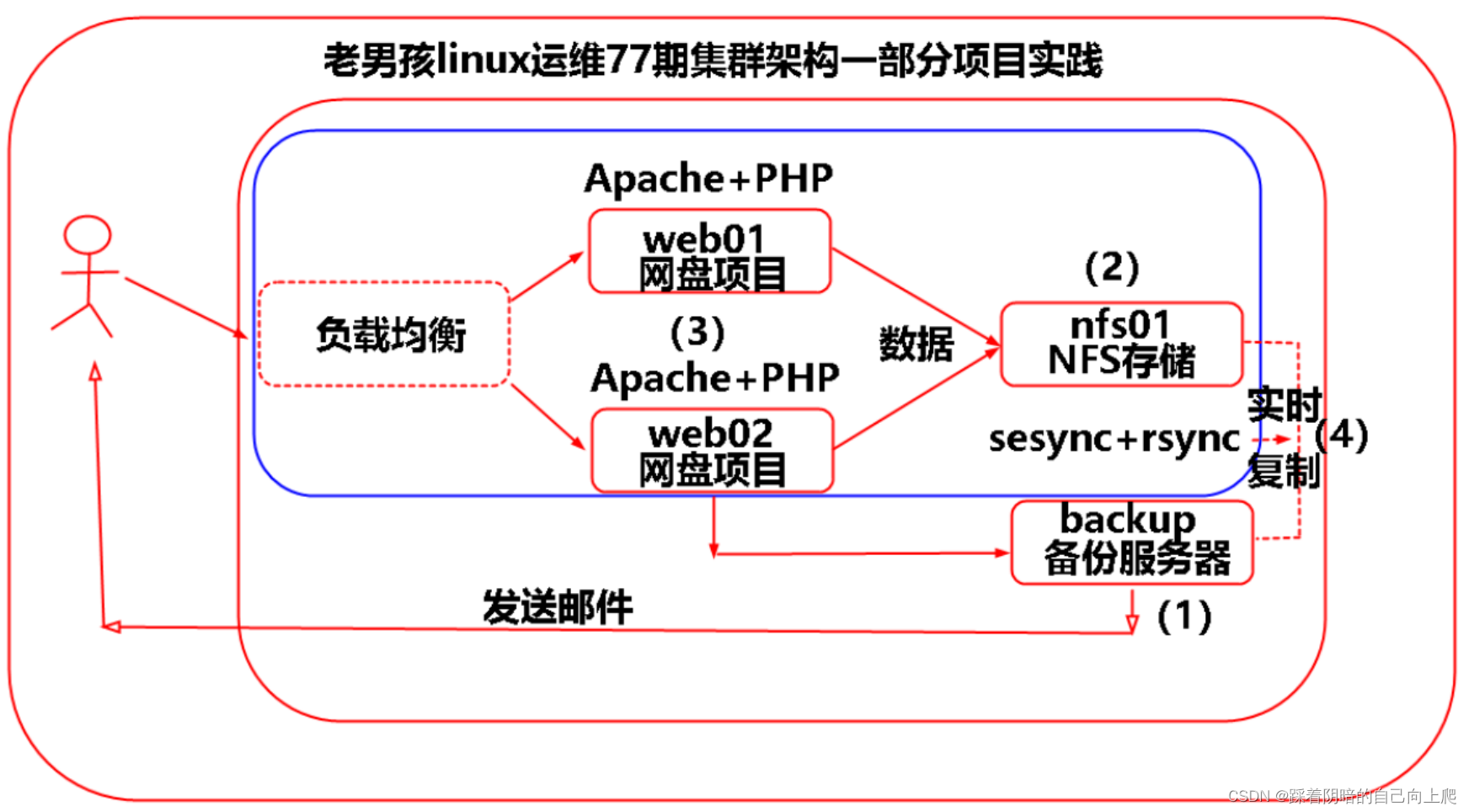
Day43-2-企业级实时复制intofy介绍及实践
Day43-2-企业级实时复制intofy介绍及实践 1. 企业级备份方案介绍1.1 利用定时方式,实现周期备份重要数据信息。1.2 实时数据备份方案1.3 实时复制环境准备1.4 实时复制软件介绍1.5 实时复制inotify机制介绍1.6 项目部署实施1.6.1 部署环境准备1.6.2 检查Linux系统支…...

2024年AI辅助研发趋势深度解析:科技革新与效率提升的双重奏
随着人工智能技术的迅猛发展,AI辅助研发正逐渐成为科技界和工业界的热门话题。特别是在2024年,这一趋势将更加明显,AI辅助研发将在各个领域展现出强大的潜力和应用价值。 首先,AI辅助研发将进一步提升研发效率。传统的研发模式往…...

bash: mysqldump: command not found
问题:在linux上执行mysql备份的时候,出现此异常 mysqldump命令找不到 解决: 1、找到mysql目录(找到mysql可执行命令目录) which mysql 有图可知,mysql安装在: /usr1/local/java/mysql 2、my…...

hcie数通和云计算选哪个好?
1. 基础知识与技能要求 数通技术是网络技术的核心,它涉及到网络协议、路由交换、网络安全等多个方面。如果你是一名网络工程师或开发者,想要在数通领域有所建树,你需要具备扎实的基础知识和丰富的实战经验。 云计算则更注重于虚拟化、存储、网…...
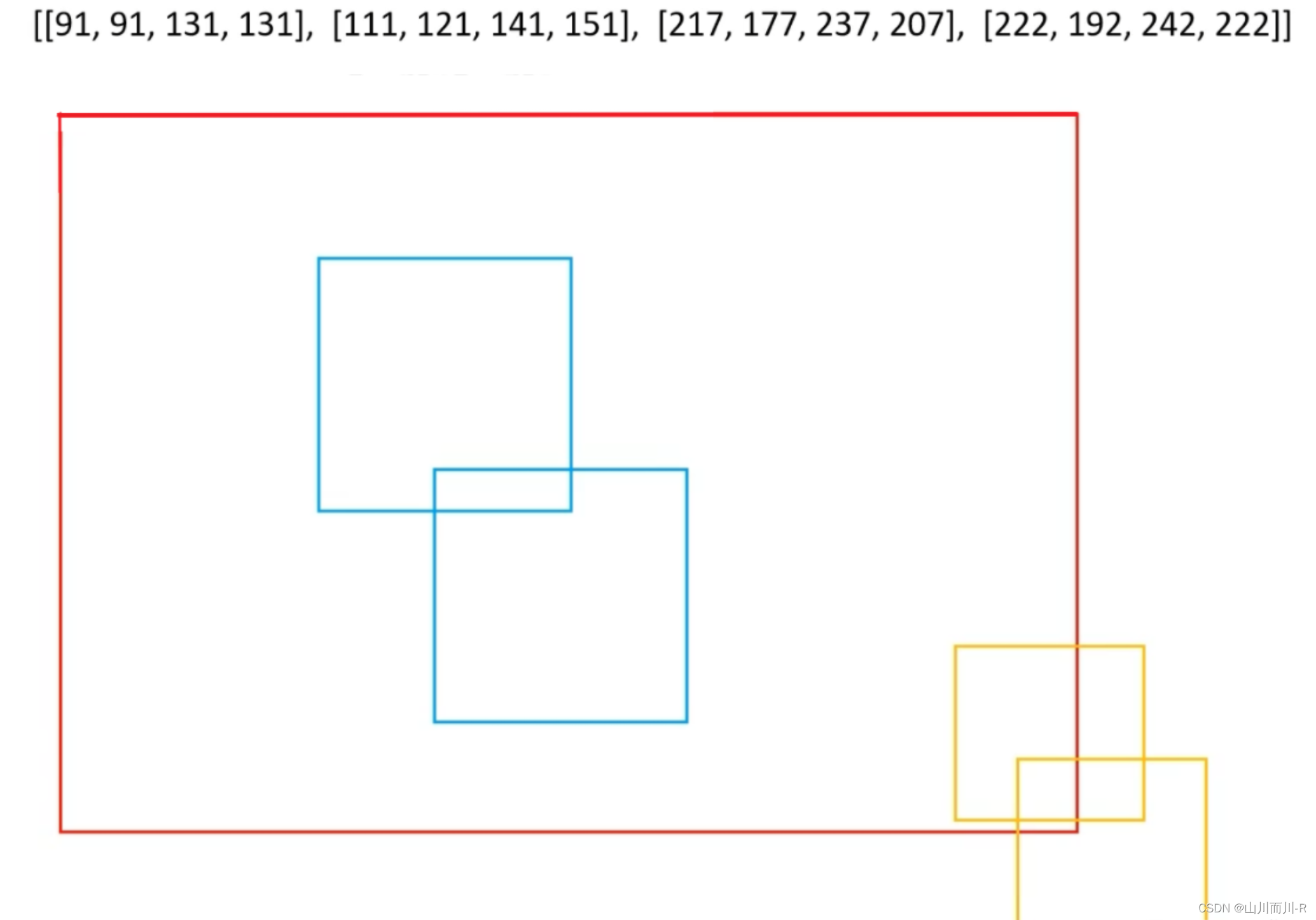
浅易理解:非极大抑制NMS
什么是非极大抑制NMS 非极大值抑制(Non-Maximum Suppression,简称NMS)是一种在计算机视觉和图像处理领域中广泛使用的后处理技术,特别是在目标检测任务中。它的主要目的是解决目标检测过程中出现的重复检测问题,即对于…...

C语言如何进⾏字符数组的复制?
一、问题 有两个字符数组a和b,a的值是“Good Bye” ,b的值是 “Bye Bye”,现在要把b 复制到a中,使a变成“Bye Bye”,应该怎么做? 二、解答 在字符串操作中,字符串复制是⽐较常⽤的操作之⼀。在…...

Linux 中搭建 主从dns域名解析服务器
CSDN 成就一亿技术人! 作者主页:点击! Linux专栏:点击! CSDN 成就一亿技术人! ————前言———— 主从(Master-Slave)DNS架构是一种用于提高DNS系统可靠性和性能的配置方式。…...

CSS3病毒病原体图形特效
CSS3病毒病原体图形特效,源码由HTMLCSSJS组成,双击html文件可以本地运行效果,也可以上传到服务器里面 下载地址 CSS3病毒病原体图形特效代码...
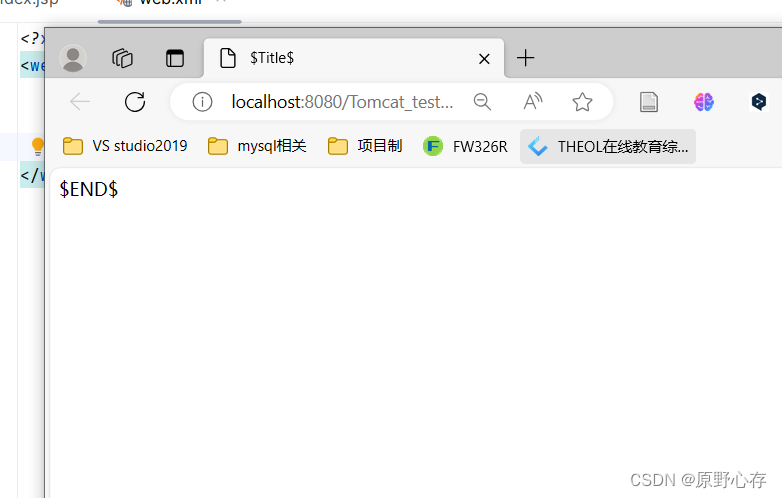
Tomcat Web 开发项目构建教程
1下载Tomcat安装包,下载链接:Apache Tomcat - Welcome!,我电脑环境为JDK8,所以下载Tomcat9.0 2、下载完压缩包后,解压到指定位置 3.在intelij中新建一个项目 4.选中创建的项目,双击shift,输入add frame...然…...
 gauss的使用)
Elasticsearch(9) gauss的使用
elasticsearch version: 7.10.1 在Elasticsearch中,gauss作为衰减函数(decay function)被用于function_score查询中,用于实现基于地理位置或其他数值字段的衰减权重评分。gauss衰减函数模拟了高斯分布,即距…...

php前端和java后端数据调用流程
php前端和java后端数据调用流程 前端 1、新建php页面title.php <title>标题</title> <td width"30%" class"form-key">标题内容</td> <td width"70%"><input type"text" class"form-control…...
C语言从入门到熟悉------第四阶段
指针 地址和指针的概念 要明白什么是指针,必须先要弄清楚数据在内存中是如何存储的,又是如何被读取的。如果在程序中定义了一个变量,在对程序进行编译时,系统就会为这个变量分配内存单元。编译系统根据程序中定义的变量类型分配…...

GEMM内核与MHA中的寄存器分配优化策略
1. GEMM内核与寄存器分配基础解析通用矩阵乘法(GEMM)作为深度学习计算的核心算子,其性能表现直接决定了神经网络训练和推理的效率。在硬件层面,寄存器分配的优劣往往能带来数倍的性能差异。我们以典型的GEMM运算C αAB βC为例&…...
:数组排序、去重、查找)
数组专项(一):数组排序、去重、查找
大家好,欢迎来到《算法面试60讲(2026最新版全真题带解析)》第19篇!上一篇我们彻底吃透了字符串专项的核心难点——BF暴力匹配与KMP高效匹配算法,搞定了字符串模块面试最难的算法考点。从本节课开始,我们正式进入算法面试第一高频模块:数组专项。 在算法面试中,数组是出…...
Transient、QuickEye、VerifyEye傻傻分不清?一文讲透Ansys里三种眼图仿真方法的适用场景与避坑指南
Transient、QuickEye、VerifyEye深度解析:Ansys眼图仿真技术选型实战指南 在高速数字系统设计中,眼图分析是评估信号完整性的黄金标准。面对Ansys工具链中三种截然不同的眼图生成方法,工程师常常陷入选择困境——是追求精确度的传统瞬态分析&…...

Owl-Alpha 新手快速上手指南
在处理大规模数据或构建高性能应用时,我们常常会遇到一个棘手的问题:如何在不阻塞主线程的情况下,高效地执行耗时任务?无论是处理图像、解析大型文件,还是进行复杂的数学运算,传统的单线程模式往往会让界面…...

荣耀出征官方网站下载正版手游 翅膀养成细节玩法全方位讲解
玩荣耀出征的玩家都清楚,翅膀不仅是角色的颜值象征,更是提升整体战力的核心途径。很多新手玩家只顾着升级、刷装备,完全忽略翅膀养成,导致等级很高但战力始终上不去。还有不少玩家胡乱合成、盲目进阶,浪费了大量稀有翅…...

MongoDB Limit 与 Skip 方法详解
MongoDB Limit 与 Skip 方法详解 引言 MongoDB 是一个高性能、可伸缩的文档存储系统,它提供了强大的数据存储和查询功能。在处理大量数据时,Limit 与 Skip 方法是 MongoDB 中常用的查询优化工具。本文将详细介绍 MongoDB 中的 Limit 与 Skip 方法,包括其基本用法、性能影响…...

Godot4 2D游戏开发避坑指南:TileMap绘制、节点顺序与相机设置的三个常见问题
Godot4 2D游戏开发避坑指南:TileMap绘制、节点顺序与相机设置的三个常见问题当你第一次用Godot4完成一个2D场景搭建时,那种成就感往往会被几个突如其来的bug瞬间击碎——角色神秘消失、背景纹丝不动、屏幕边缘出现诡异黑边。这些问题看似简单,…...

多智能体谈判系统:Agent 如何通过博弈达成最优交易价格?
多智能体谈判系统:Agent 如何通过博弈达成最优交易价格?关键词 多智能体系统、自动谈判、博弈论、纳什均衡、帕累托最优、双边/多边谈判、强化学习谈判、动态定价 摘要 想象一个没有人类中介的世界:电商平台上的智能客服自动和批发商砍价、供…...

yolo视频识别 车辆速度估计识别 yolo11视频实时速度测量与测速估计
文章目录YOLOv11:视频实时速度测量与测速估计一、YOLOv11概述二、速度测量原理三、距离测量方法四、应用场景五、实践案例以下是关于使用YOLOv11进行视频实时速度测量与测速估计的介绍: YOLOv11:视频实时速度测量与测速估计 随着计算机视觉…...
)
实战对比:用直方图均衡化与CLAHE拯救你的背光/过曝照片(附Python完整代码)
拯救逆光废片:直方图均衡化与CLAHE的实战效果对比每次旅行回来整理照片时,总会有几张因为光线问题几乎要删除的废片——要么是逆光下的人脸黑得看不清五官,要么是天空过曝失去所有云层细节。这些照片往往记录着重要时刻,直接删除实…...