Ubuntu 20.04.06 PCL C++学习记录(十八)
@[TOC]PCL中点云分割模块的学习
学习背景
参考书籍:《点云库PCL从入门到精通》以及官方代码PCL官方代码链接,,PCL版本为1.10.0,CMake版本为3.16
学习内容
PCL中实现欧式聚类提取。在点云处理中,聚类是一种常见的任务,它将点云数据划分为多个独立的簇或集群。每个簇代表点云中的一个独立物体或区域。聚类可以帮助我们从复杂的点云场景中识别出单独的物体,为后续的物体识别、分类和其他处理任务奠定基础。
源代码及所用函数
源代码
#include<pcl/ModelCoefficients.h>//定义名为 pcl::ModelCoefficients 的类,用于存储模型的系数
#include<pcl/point_types.h>
#include<pcl/io/pcd_io.h>
#include<pcl/filters/extract_indices.h>
#include<pcl/filters/voxel_grid.h>
#include<pcl/kdtree/kdtree.h>
#include<pcl/sample_consensus/method_types.h>//随机参数估计方法头文件
#include<pcl/sample_consensus/model_types.h>//定义 PCL 中用于随机采样一致性 (SAC) 方法的枚举类型
#include<pcl/segmentation/sac_segmentation.h>//提供 PCL 中用于基于随机采样一致性 (SAC) 方法进行点云分割的类和函数
#include<pcl/segmentation/extract_clusters.h>//包含 PCL (Point Cloud Library) 中用于点云聚类的头文件/******************************************************************************打开点云数据,并对点云进行滤波重采样预处理,然后采用平面分割模型对点云进行分割处理提取出点云中所有在平面上的点集,并将其存盘
******************************************************************************/
int main(int argc,char** argv)
{/*********************************************************读取点云数据***************************/pcl::PCDReader reader;pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);reader.read("/home/jojo/PointCloud/table_400.pcd",*cloud);std::cout << "滤波之前有" << cloud->points.size() << "个点" << std::endl;/*************************************创建过滤对象:使用 1 厘米大小的叶片对数据集进行下采样************///使用体素化网格方法实现下采样,即减少点的数量 减少点云数据,并同时保存点云的形状特征 pcl::VoxelGrid<pcl::PointXYZ> vg;pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_f(new pcl::PointCloud<pcl::PointXYZ>);vg.setInputCloud(cloud);//设置需要过滤的点云给滤波对象vg.setLeafSize(0.01f,0.01f,0.01f);//设置滤波时创建的体素体积为1cm的立方体vg.filter(*cloud_filtered); //执行滤波处理,存储输出std::cout << "滤波之后有" << cloud_filtered->points.size() << "个点" << std::endl;/****************************创建平面模型分割的对象并设置参数************************************/pcl::SACSegmentation<pcl::PointXYZ> seg;pcl::PointIndices::Ptr inliers(new pcl::PointIndices);pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients);pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_plane(new pcl::PointCloud<pcl::PointXYZ>());pcl::PCDWriter writer;seg.setOptimizeCoefficients(true);seg.setModelType(pcl::SACMODEL_PLANE);//分割模型seg.setMethodType(pcl::SAC_RANSAC);//随机参数估计方法seg.setMaxIterations(100);//最大的迭代次数seg.setDistanceThreshold(0.02);//设置阈值int i = 0,nr_points = (int)cloud_filtered->points.size();while (cloud_filtered->points.size() > 0.3 * nr_points){/**********************************从剩余云中分离出最大的平面***************************/seg.setInputCloud(cloud_filtered);seg.segment(*inliers,*coefficients);if(inliers->indices.size() == 0){std::cout << "找不到平面对象" << std::endl;break;}pcl::ExtractIndices<pcl::PointXYZ> extract;extract.setInputCloud(cloud_filtered);extract.setIndices(inliers);extract.setNegative(false);/********************************获取与平面相关的点**********************************/extract.filter(*cloud_plane);std::cout << "代表平面组件的点云有:" << cloud_plane->points.size() << "个" << std::endl;/******************************移去平面局内点,提取剩余点云****************************/extract.setNegative(true);extract.filter(*cloud_f);*cloud_filtered = *cloud_f;}/******************************创建KD树对象****************************************/pcl::search::KdTree<pcl::PointXYZ>::Ptr kdtree(new pcl::search::KdTree<pcl::PointXYZ>);kdtree->setInputCloud(cloud_filtered);std::vector<pcl::PointIndices> cluster_indices;pcl::EuclideanClusterExtraction<pcl::PointXYZ> ec;//欧式聚类对象ec.setClusterTolerance(0.02);// 设置近邻搜索的搜索半径为2cmec.setMinClusterSize(100);//设置一个聚类需要的最少的点数目为100ec.setMaxClusterSize(25000);//设置一个聚类需要的最大点数目为25000ec.setSearchMethod(kdtree);//设置点云的搜索机制ec.setInputCloud(cloud_filtered);ec.extract(cluster_indices);//从点云中提取聚类,并将点云索引保存在cluster_indices中//迭代访问点云索引cluster_indices,直到分割处所有聚类int j = 0;for (std::vector<pcl::PointIndices>::const_iterator it = cluster_indices.begin();it != cluster_indices.end();++it){pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_cluster(new pcl::PointCloud<pcl::PointXYZ>);for (std::vector<int>::const_iterator pit = it->indices.begin();pit != it->indices.end();pit++){cloud_cluster->points.push_back(cloud_filtered->points[*pit]);}cloud_cluster->width = cloud_cluster->points.size();cloud_cluster->height = 1;cloud_cluster->is_dense = true;std::cout << "代表集群的点云:" << cloud_cluster->points.size() << "个" << std::endl;std::stringstream ss;ss << "cloud_cluster_" << j << ".pcd";writer.write<pcl::PointXYZ>(ss.str(),*cloud_cluster,false);j++;}return 0;}CMakeLists.txt
cmake_minimum_required(VERSION 3.16 FATAL_ERROR)#指定CMake的最低版本要求为3.16
project(project)#设置项目名称
find_package(PCL 1.10 REQUIRED)#查找PCL库,要求版本为1.10或更高。
include_directories(${PCL_INCLUDE_DIRS})#将PCL库的头文件目录添加到包含路径中
link_directories(${PCL_LIBRARY_DIRS})#将PCL库的库文件目录添加到链接器搜索路径中。
add_definitions(${PCL_DEFINITIONS})#添加PCL库的编译器定义
add_executable (cluster_extraction cluster_extraction.cpp)
target_link_libraries (cluster_extraction ${PCL_LIBRARIES})#将PCL库链接到可执行文件目标。运行结果






函数
pcl/segmentation/extract_clusters.h包含 PCL (Point Cloud Library) 中用于点云聚类的头文件
补充内容
相关文章:
Ubuntu 20.04.06 PCL C++学习记录(十八)
[TOC]PCL中点云分割模块的学习 学习背景 参考书籍:《点云库PCL从入门到精通》以及官方代码PCL官方代码链接,,PCL版本为1.10.0,CMake版本为3.16 学习内容 PCL中实现欧式聚类提取。在点云处理中,聚类是一种常见的任务,它将点云数据划分为多…...

细雨踏春日,新会公安护平安
春雨起,清明至。又是一年春草绿,又是一年清明时。细雨踏春日,思怀故人时,是哀思,亦是相聚。新会公安一抹抹葵乡春日“警”色坚守岗位,确保清明祭扫平稳有序,为人民群众的平安保驾护航。 为确保2…...

3d怎么在一块模型上开个孔---模大狮模型网
在进行3D建模时,有时候需要在模型上创建孔,以实现特定的设计需求或功能。无论是为了添加细节,还是为了实现功能性的要求,创建孔都是常见的操作之一。本文将介绍在3D模型上创建孔的几种常用方法,帮助您轻松实现这一目标…...
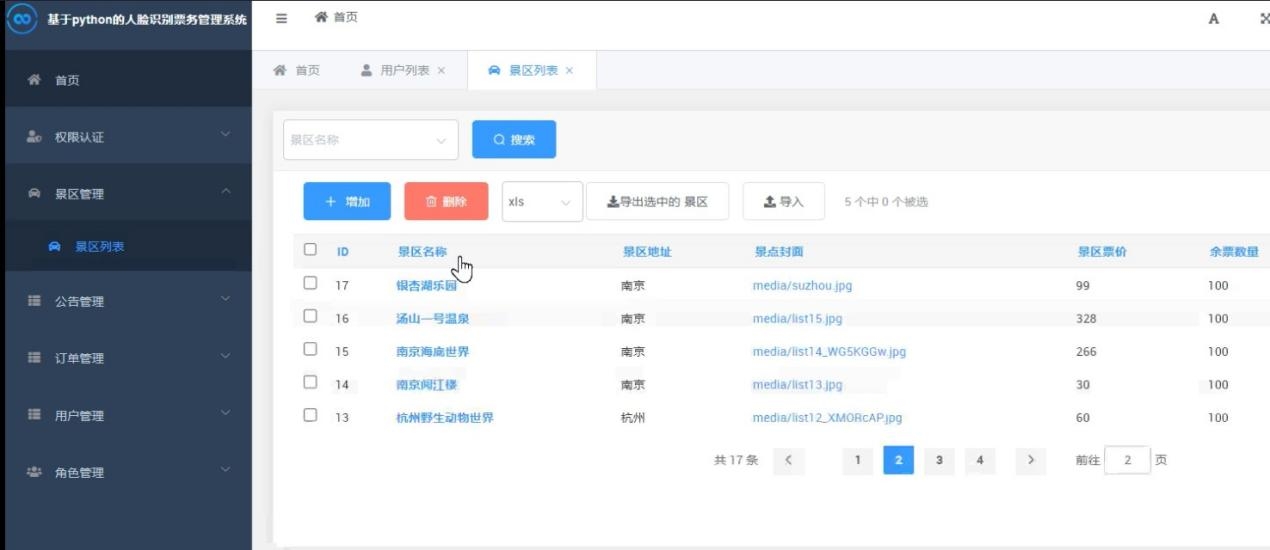
Python景区票务人脸识别系统(V2.0),附源码
博主介绍:✌程序员徐师兄、7年大厂程序员经历。全网粉丝12w、csdn博客专家、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 🍅文末获取源码联系🍅 👇🏻 精彩专栏推荐订阅👇…...

全球化业务的网络安全挑战
随着企业业务的全球化,跨国数据传输和用户跨地域访问成为常态。这不仅带来了巨大的商业机会,也带来了以下网络安全挑战: 数据泄露风险:跨国数据传输增加了数据被截获和泄露的风险。访问限制:某些地区可能对互联网内容…...

SQL简单优化思路
在编写SQL查询时,优化查询性能是一个重要的考虑因素,特别是在处理多表连接(JOIN)和子查询时。以下是一些具体的技巧和最佳实践,可以帮助你在保持相同返回值的前提下,降低SQL执行速度: 明确连接顺…...

外包干了25天,技术倒退明显
先说情况,大专毕业,18年通过校招进入湖南某软件公司,干了接近6年的功能测试,今年年初,感觉自己不能够在这样下去了,长时间呆在一个舒适的环境会让一个人堕落! 而我已经在一个企业干了四年的功能…...
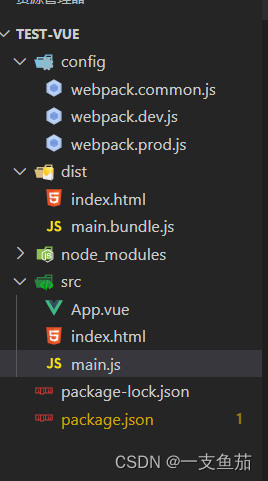
webpack环境配置分类结合vue使用
文件目录结构 按照目录结构创建好文件 控制台执行: npm install /config/webpack.common.jsconst path require(path) const {merge} require(webpack-merge) const {CleanWebpackPlugin} require(clean-webpack-plugin) const { VueLoaderPlugin } require(vue-loader); c…...

【蓝桥杯嵌入式】第十三届省赛(第二场)
目录 0 前言 1 展示 1.1 源码 1.2 演示视频 1.3 题目展示 2 CubeMX配置(第十三届省赛第二场真题) 2.1 设置下载线 2.2 HSE时钟设置 2.3 时钟树配置 2.4 生成代码设置 2.5 USART1 2.5.1 基本配置 2.5.2 NVIC 2.5.3 DMA 2.6 TIM 2.6.1 TIM2 2.6.2 TIM4 2.6.3 …...

maya节点绕轴旋转
目录 旋转后并尝试冻结变换 绕x轴旋转90度 使用Python脚本 使用图形界面 使用MEL脚本 绕y轴旋转90度 使用Python脚本 ok 旋转后并尝试冻结变换 import maya.cmds as cmdsdef adjust_root_rotation_for_export(joint_name):# 选择根节点cmds.select(joint_name)# 应用旋…...

如何水出第一篇SCI:SCI发刊历程,从0到1全过程经验分享!!!
如何水出第一篇SCI:SCI发刊历程,从0到1全路程经验分享!!! 详细的改进教程以及源码,戳这!戳这!!戳这!!!B站:Ai学术叫叫兽e…...

SpringBoot表单防止重复提交
哪些因素会引起重复提交? 开发的项目中可能会出现下面这些情况: 前端下单按钮重复点击导致订单创建多次 网速等原因造成页面卡顿,用户重复刷新提交请求 黑客或恶意用户使用postman等http工具重复恶意提交表单 重复提交会带来哪些问题&…...
)
java面向对象.day17(什么是面向对象)
先认识:面向过程思想,面向对象思想 面向过程思想(具体) 步骤清晰简单,第一步做什么,第二步做什么.... 面对过程适合处理一些较为简单的问题 面向对象思想(抽象) 物以类聚&#x…...

mysql处理并发简单示例
处理并发的基本思路是使用锁来控制对共享资源的访问。在MySQL中,可以使用事务和行级锁来处理并发。 具体处理方式如下: 创建一个用于存储并发任务的MySQL表,该表包含一个自增的ID字段和任务名称字段。设置一个最大并发数量,用来…...

顺序表——功能实现
✨✨欢迎👍👍点赞☕️☕️收藏✍✍评论 个人主页:秋邱博客 所属栏目:C语言 (感谢您的光临,您的光临蓬荜生辉) 目录 1.0 前言 2.0 线性表 2.1 顺序表 2.2 顺序表的分类 2.3 顺序表功能的实现…...

达梦导出工具dexp
基础环境 操作系统:Red Hat Enterprise Linux Server release 7.9 (Maipo) 数据库版本:DM Database Server 64 V8 架构:单实例dexp 逻辑导出 dexp 工具可以对本地或者远程数据库进行数据库级、用户级、模式级和表级的逻辑备份。备份的内容非…...

Ubuntu 22.04安装新硬盘并启动时自动挂载
方法一 要在Ubuntu 22.04系统中安装一个新硬盘、对其进行格式化并实现启动时自动挂载,需要按以下步骤操作: 1. 安装硬盘 - 确保你的硬盘正确连接到计算机上(涉及硬件安装)。 2. 发现新硬盘 - 在系统启动后,打开终端…...

Mybatis中sqlSession.getMapper背后的原理
在通过MyBatis操作数据库之前我们一定先通过Session对象获取指定Mappper接口的代理对象。如下代码所示: public class UserMapper{Select(value"SELECT * FROM user")public List<User> findAll(); }public static void main(String [] args){Conf…...

[环境配置]conda 64位安装32位python
进入32模式 set CONDA_FORCE_32BIT1创建环境 conda create --name yourEnv python3.8退出32模式 set CONDA_FORCE_32BIT0ok...
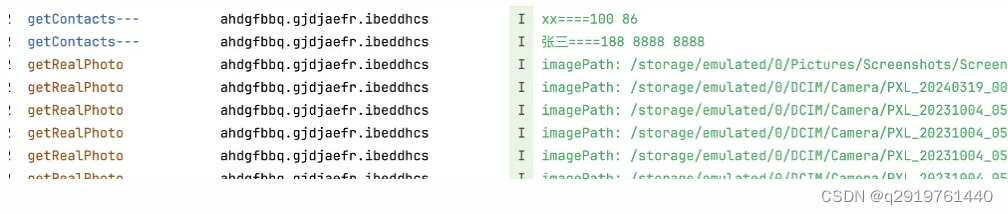
某虚假交友APP(信息窃取)逆向分析
应用初探 在群里水群的时候 群u发了一个交友APP 于是拿来分析一下 可以看到应用打开后又一个登录的界面 需要用户输入手机号与验证码进行登录 #在线云沙箱分析 将APK放入某安信云沙箱中分析 提示应用请求了过多的敏感权限 逆向分析 直接拖入Jadx分析 好在程序没有加固 也没…...
—— 用C#构建2D躲避游戏的核心机制)
Godot实战(一)—— 用C#构建2D躲避游戏的核心机制
1. 环境准备与项目初始化 第一次打开Godot引擎时,那个简洁的界面可能会让你有点不知所措。别担心,我们一步步来。点击"New Project"按钮,给你的游戏项目起个名字,比如"DodgeTheCreeps"。建议专门创建一个空文…...

NotebookLM相似文档推荐不准,深度解析向量维度坍缩、跨域语义漂移与上下文窗口截断三大根源问题
更多请点击: https://intelliparadigm.com 第一章:NotebookLM相似文档推荐不准的系统性现象观察 在实际使用 NotebookLM 过程中,用户频繁反馈其“相似文档推荐”功能存在显著偏差:高语义相关但低表面重合度的文档常被遗漏&#x…...
)
告别‘悲’:当AssetStudio遇到加密的AssetBundle,试试这几款替代工具(附实战对比)
突破加密壁垒:Unity资源逆向工程全工具链实战指南 当AssetStudio面对加密的AssetBundle时,开发者常陷入困境。本文将系统梳理Unity资源逆向工程的完整解决方案,从基础提取到高级解密技术,提供一套可落地的工具链选择策略。 1. 加密…...

基于SpringBoot+Vue的旅游景点攻略与门票预订系统毕业设计
博主介绍:✌ 专注于Java,python,✌关注✌私信我✌具体的问题,我会尽力帮助你。一、研究目的本研究旨在构建一个基于Spring Boot与Vue框架的旅游景点攻略与门票预订系统以解决传统旅游信息管理中存在的数据孤岛现象服务响应滞后问题以及用户体验单一化等核…...

[具身智能-791]:NAV2 全局规划层 A*算法的本质是距离最短,而不是时间最短算法
核心定论A 算法本质:优先求解几何物理距离最短路径,天生不是「通行耗时最短」算法*一、直白区分A 追求目标*以栅格空间长度为核心权重,算出纯路程最短的路线,只看走了多少米,不看好不好走、堵不堵、快慢如何。时间最短…...

PyCharm 运行 FastAPI 接口请求阻塞?竟是后台多进程残留导致
问题描述在 PyCharm 中启动 FastAPI 项目进程后,使用 Postman 发起接口请求出现明显阻塞现象,不仅请求迟迟无法得到响应,项目控制台也完全接收不到任何请求日志,接口调用彻底失效。 问题根源分析日常开发中习惯性直接关闭运行终端…...

LangChain实战:从零构建RAG应用与模块化开发指南
1. 项目概述:LangChain示例库的实战价值如果你最近在尝试用大语言模型(LLM)构建应用,大概率会听到“LangChain”这个名字。它就像一个乐高积木的百宝箱,把调用LLM、连接外部数据、管理对话记忆这些复杂任务,…...

AutoJs6:Android平台终极JavaScript自动化解决方案
AutoJs6:Android平台终极JavaScript自动化解决方案 【免费下载链接】AutoJs6 安卓平台 JavaScript 自动化工具 (Auto.js 二次开发项目) 项目地址: https://gitcode.com/gh_mirrors/au/AutoJs6 你是否曾经想过用JavaScript代码就能控制Android手机完成各种重复…...

3步解锁Figma中文界面:设计师效率翻倍的终极指南
3步解锁Figma中文界面:设计师效率翻倍的终极指南 【免费下载链接】figmaCN 中文 Figma 插件,设计师人工翻译校验 项目地址: https://gitcode.com/gh_mirrors/fi/figmaCN 还在为Figma的英文界面而烦恼?每次操作都要在大脑中翻译一遍&am…...

【Qt串口实战】硬件升级后readyRead信号丢失的排查与修复
1. 问题现象:硬件升级后readyRead信号神秘消失 那天早上刚到公司,硬件组的同事兴冲冲地跑过来告诉我:"老王,我们给设备升级了最新固件,性能提升30%!"我心想这是好事啊,结果打开调试软…...