实验笔记之——DPVO(Deep Patch Visual Odometry)
本博文记录本文测试DPVO的过程,本博文仅供本人学习记录用~
《Deep Patch Visual Odometry》
代码链接:GitHub - princeton-vl/DPVO: Deep Patch Visual Odometry
目录
配置过程
测试记录
参考资料
配置过程
首先下载代码以及创建conda环境
git clone https://github.com/princeton-vl/DPVO.git --recursive
cd DPVOconda env create -f environment.yml
conda activate dpvo然后安装eigen以及下载DPVO对应的模型及数据,同时安装DPVO
wget https://gitlab.com/libeigen/eigen/-/archive/3.4.0/eigen-3.4.0.zip
unzip eigen-3.4.0.zip -d thirdparty# install DPVO
pip install .# download models and data (~2GB)
./download_models_and_data.sh安装成功~

可视化工具,采用Pangolin Viewer
./Pangolin/scripts/install_prerequisites.sh
mkdir Pangolin/build && cd Pangolin/build
cmake ..
make -j8
sudo make install
cd ../..然后安装viewer
pip install ./DPViewer
采用MobaXterm来运行下面代码从而观看demo
conda activate dpvopython demo.py \--imagedir=<path to image directory or video> \--calib=<path to calibration file> \--viz # enable visualization--plot # save trajectory plot--save_reconstruction # save point cloud as a .ply file--save_trajectory # save the predicted trajectory as .txt in TUM formatIphone数据
CUDA_VISIBLE_DEVICES=3 python demo.py \--imagedir=movies/IMG_0482.MOV \--calib=calib/iphone.txt\--viz \--plot \--save_reconstruction \--save_trajectory CUDA_VISIBLE_DEVICES=2 python demo.py --imagedir=mav0/cam0/data --calib=calib/euroc.txt --stride=2 --plot --viz如果报错ImportError: libpango_windowing.so: cannot open shared object file: No such
那么安装sudo ldconfig。
如果出现错误:
ImportError: /home/gwp/miniconda3/envs/dpvo/bin/../lib/libstdc++.so.6: version `GLIBCXX_3.4.30' not found (required by /usr/local/lib/libpango_core.so)
先使用"ll"命令查看一下该文件的概况:

然后用下面命令查看
strings /usr/lib/x86_64-linux-gnu/libstdc++.so.6 | grep GLIBCXX
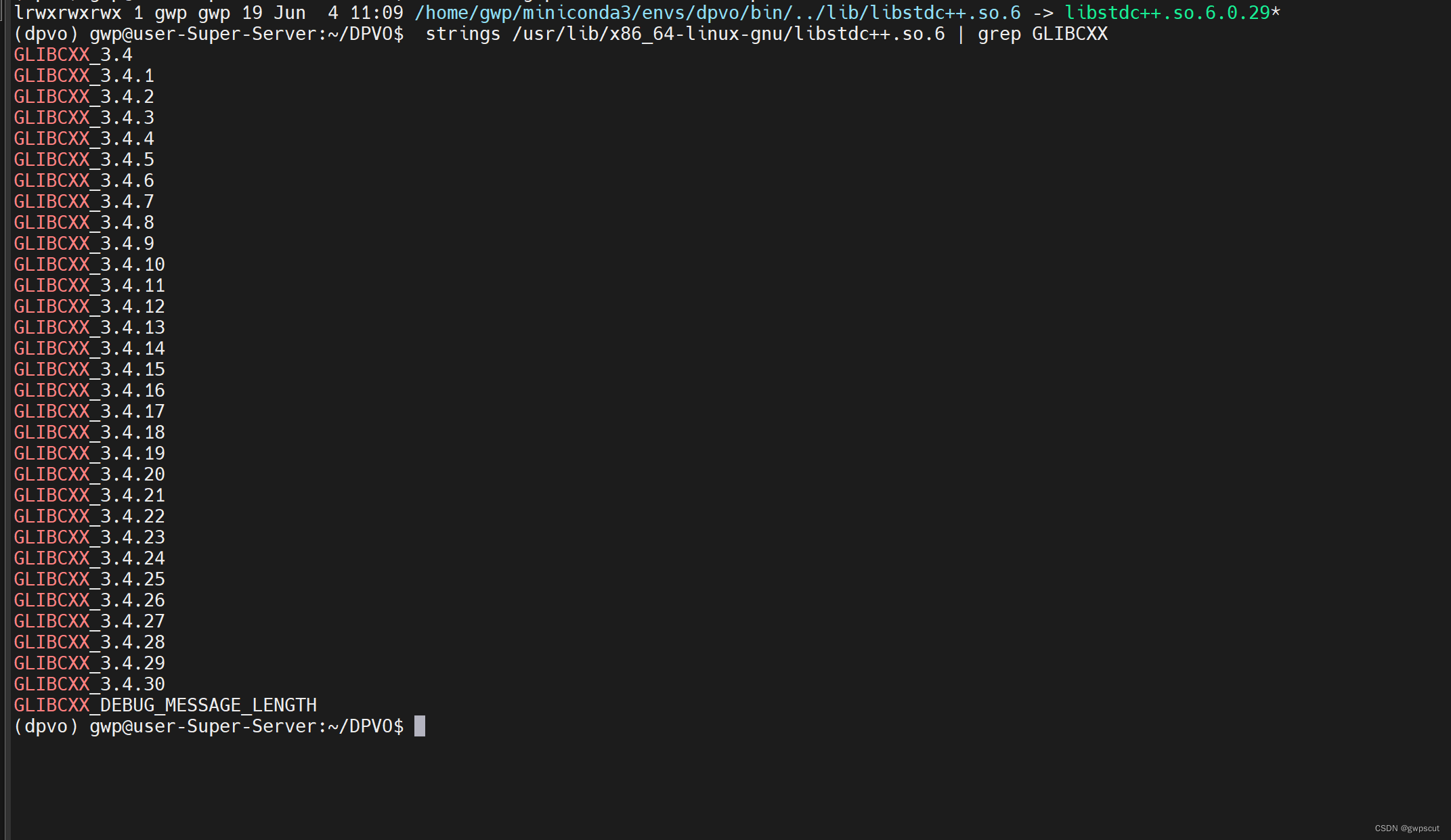
可以发现,GLIBCXX_3.4.30是存在的。既然已经存在了上述目标文件,所以只需要重新创建软连接使得anaconda3 能够识别到这个目标文件就可以了。
ln -sf /usr/lib/x86_64-linux-gnu/libstdc++.so.6 /home/gwp/miniconda3/envs/dpvo/bin/../lib/libstdc++.so.6然后再次运行,就没有报错了~
但是运行会出现:Framebuffer with requested attributes not available. Using available framebuffer. You may see visual artifacts.Segmentation fault (core dumped)
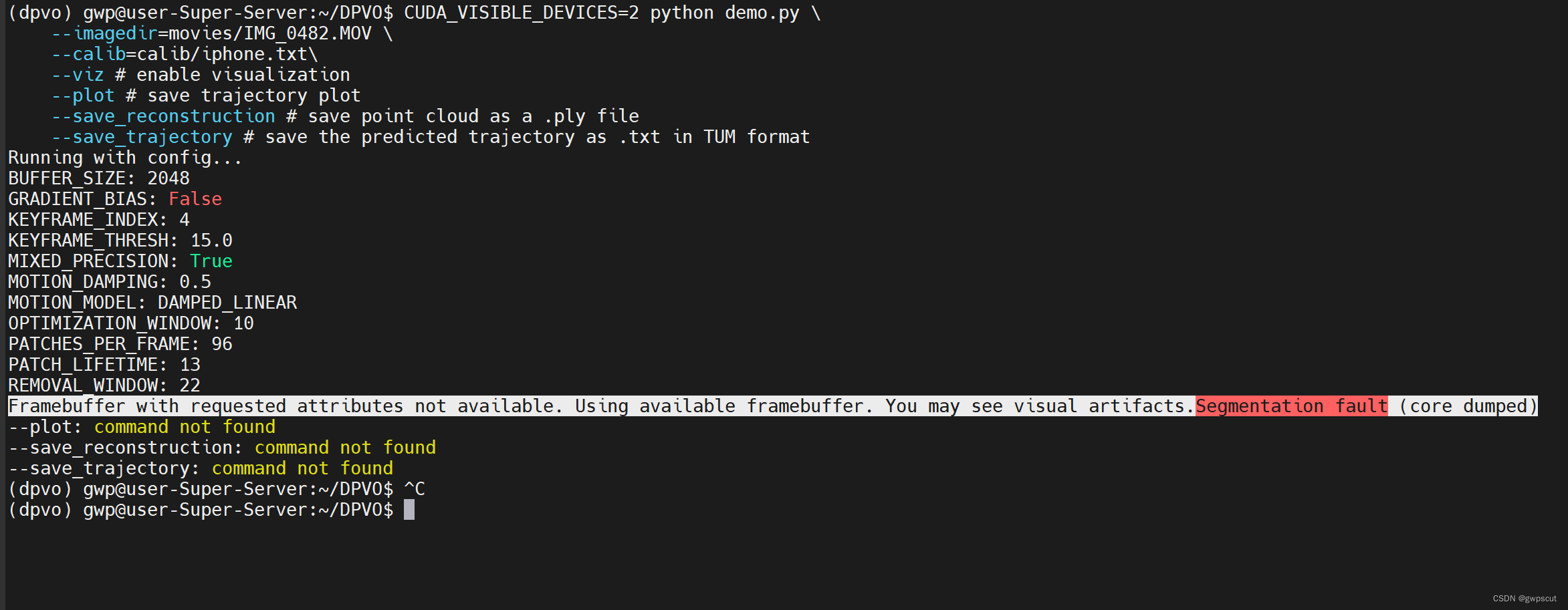
好像是类似ORBSLAM2的问题导致的

因此,搜全文-march=native,并注释掉。再试试。还是一样的错误。从博客(DPVO服务器端复现-CSDN博客)中发现可能是原来的可视化有点问题~~~
然后再运行就可以了~读者可选用博客(DPVO服务器端复现-CSDN博客)提供的代码或者下面提供的代码。均可实现运行
https://github.com/KwanWaiPang/DPVO_comment![]() https://github.com/KwanWaiPang/DPVO_comment
https://github.com/KwanWaiPang/DPVO_comment
测试记录
python demo.py --imagedir=movies/IMG_0492.MOV --calib=calib/iphone.txt --stride=5 --viz
DPVO testing 0482
DPVO testing 0497
DPVO testing 0493
DPVO testing 0492
参考资料
DPVO服务器端复现-CSDN博客
如何解决 :libstdc++.so.6: version `GLIBCXX_3.4.30‘ not found-CSDN博客
相关文章:
实验笔记之——DPVO(Deep Patch Visual Odometry)
本博文记录本文测试DPVO的过程,本博文仅供本人学习记录用~ 《Deep Patch Visual Odometry》 代码链接:GitHub - princeton-vl/DPVO: Deep Patch Visual Odometry 目录 配置过程 测试记录 参考资料 配置过程 首先下载代码以及创建conda环境 git clo…...
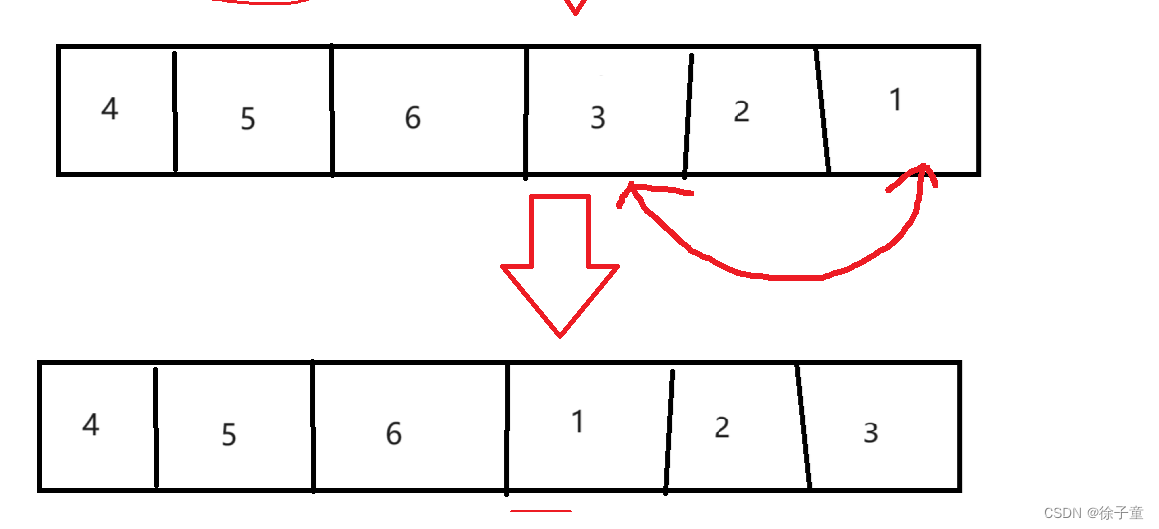
力扣----轮转数组
题目链接:189. 轮转数组 - 力扣(LeetCode) 思路一 我们可以在进行每次轮转的时候,先将数组的最后一个数据的值存储起来,接着将数组中前n-1个数据依次向后移,最后将存储起来的值赋给数组中的第一个数据。 …...

哥斯拉、冰蝎、中国蚁剑在护网中流量特征分析,收藏起来当资料吧,24年护网用得上
护网哥斯拉、冰蝎、中国蚁剑流量分析 【点击免费领取】CSDN大礼包:《黑客&网络安全入门&进阶学习资源包》🔗包含了应急响应工具、入侵排查、日志分析、权限维持、Windows应急实战、Linux应急实战、Web应急实战。 护网中最担心的是木马已经到了服…...

隐藏饼图的legend,重写legend列表。
因为要实现的饼图效果较复杂,所以,需要重新写列表。 点击右侧列表的圆点,实现隐藏左侧饼图相应环状。 <template><div class="index_div"><a-spin :spinning="aLoading"><scalescreen:width="1920":height="1080&…...

解决在Mac下使用npm报错:Error: EACCES: permission denied
原因说明:没有足够的权限在 /usr/local/lib/node_modules 目录下创建文件夹 这个错误表明你在安装或更新 Vue.js(vue)包时,没有足够的权限在 /usr/local/lib/node_modules 目录下创建文件夹。这通常是因为默认情况下,普…...

pvt对net delay的影响
我正在「拾陆楼」和朋友们讨论有趣的话题,你⼀起来吧? 拾陆楼知识星球入口 有星球成员提问: pt中在同一个corner下的net的为啥在min和max的情况下读RC值是不一样的呢??不应该都是根据spef来的吗?? 回答: 这个其实是个误区,相同RC corner情况下我们看report_delay_…...

力扣5 最长回文子串
给你一个字符串 s,找到 s 中最长的 回文子串。 示例 1: 输入:s "babad" 输出:"bab" 解释:"aba" 同样是符合题意的答案。示例 2: 输入:s "cbbd" 输…...
【Uniapp小程序】自定义导航栏uni-nav-bar滚动渐变色
效果图 新建activityScrollTop.js作为mixins export default {data() {return {navBgColor: "rgba(0,0,0,0)", // 初始背景颜色为完全透明navTextColor: "rgba(0,0,0,1)", // 初始文字颜色};},onPageScroll(e) {// 设置背景const newAlpha Math.min((e.s…...
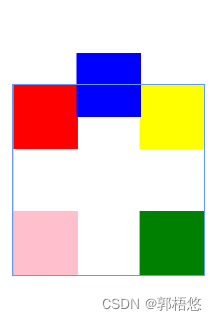
HarmonyOS鸿蒙学习笔记(25)相对布局 RelativeContainer详细说明
RelativeContainer 简介 前言核心概念官方实例官方实例改造蓝色方块改造center 属性说明参考资料 前言 RelativeContainer是鸿蒙的相对布局组件,它的布局很灵活,可以很方便的控制各个子UI 组件的相对位置,其布局理念有点类似于android的约束…...

自然语言处理学习中英文翻译语料库
在自然语言处理(NLP)领域,学习中英文翻译需要高质量的双语语料库。以下是一些常用的中英文翻译语料库资源: OpenSubtitles: 网站: OpenSubtitles 描述:OpenSubtitles 提供了大量的电影和电视剧…...

可视化数据科学平台在信贷领域应用系列二:数据清洗
上一篇文章中,某互联网银行零售信贷风险建模专家使用数据科学平台Altair RapidMiner——完成了数据探索工作,《可视化数据科学平台在信贷领域应用系列一:数据探索》。本次这位建模专家再次和大家分享数据准备的第二步骤,数据清洗。…...
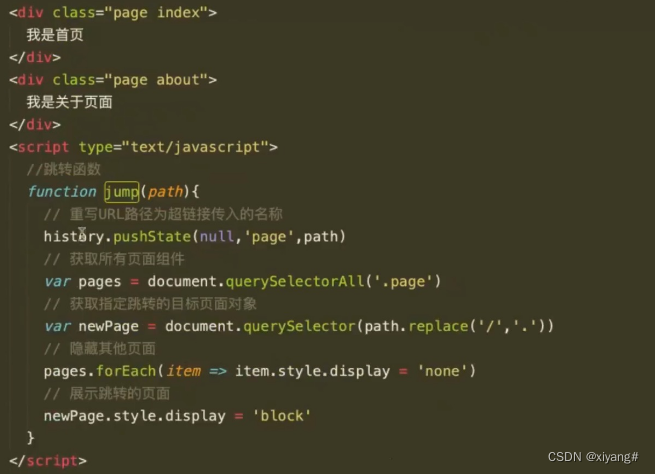
JS面试题:hash和history的区别
一、hash 模式和 history 模式的介绍 由于 Vue 项目为单页面应用,所以整个项目在开发和构建过程中,仅存在一个HTML物理文件。通过路由系统可以实现将项目的组件与可访问的URL路径进行绑定。由于Vue项目只有一个HTML物理文件,切换页面时既需要…...
)
GEE案例——归一化差异水体指数丰水期、枯水期的水域面积和水深分析(青海湖为例)
简介 水深反演是指利用遥感技术从航空或卫星平台上获取的数据来推断水体的深度信息。这种技术在海洋学、湖泊和河流的科学研究与管理中非常重要。以下是几种常用的水深反演方法: 1. **光学遥感反演**: - 基于水体颜色和透明度的变化与水深的关系,使用光学遥感影像(如L…...

机器视觉检测--相机
一,相机就是CCD么? 通常,我们把相机都叫作CCD,CCD已经成了相机的代名词。其实很可能正在使用的是CMOS。CCD以及CMOS都称为感光元件,都是将光学图像转换为电子信号的半导体元件。他们在检测光时都采用光电二极管&#…...

【人工智能】第四部分:ChatGPT的技术实现
人不走空 🌈个人主页:人不走空 💖系列专栏:算法专题 ⏰诗词歌赋:斯是陋室,惟吾德馨 目录 🌈个人主页:人不走空 💖系列专栏:算法专题 ⏰诗词歌…...

小程序配置自定义tabBar及异形tabBar配置操作
什么是tabBar? 小程序的tabbar是指小程序底部的一组固定导航按钮,通常包含2-5个按钮,用于快速切换小程序的不同页面。每个按钮都有一个图标和文本标签,点击按钮可以切换到对应的页面。tabbar通常放置在小程序的底部,以…...

解析《动物园规则怪谈》【逻辑】
鉴赏《动物园规则怪谈》【逻辑】 前言版权推荐鉴赏《动物园规则怪谈》推理游客正方“它”方其他物品 不同规则或纸条的对比联系出现的地方及联系游客入园历程:被“它”污染的过程鉴赏升华 最后 前言 2024-5-31 13:05:38 以下内容源自《【逻辑】》 仅供学习交流使用…...
上传RKP 证书签名请求息上传到 Google 的后端服务器
上传证书签名请求 1.准备环境:OK pip3 install google-auth2.13.0 requests2.28下载 device_info_uploader.py 。 没找到先跳过 选项 1:通过 GCP 帐户使用 device_info_uploader.py 运行脚本。 ./device_info_uploader.py --credentials /secure/s…...

Debian和ubuntu 嵌入式的系统的 区别
随着开源操作系统的日益流行,Debian和Ubuntu这两个基于Linux的发行版本成为了众多开发者和系统管理员的首选。它们各自拥有独特的优势和特点,那么,在选择时,哪一个更适合你呢?接下来,我们将深入探讨两者的关…...

HTML旋转照片盒子
效果图 <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><meta http-equiv"X-UA-Compatible" content…...

N_m3u8DL-CLI-SimpleG:跨平台M3U8视频下载工具全场景应用指南
N_m3u8DL-CLI-SimpleG:跨平台M3U8视频下载工具全场景应用指南 【免费下载链接】N_m3u8DL-CLI-SimpleG N_m3u8DL-CLIs simple GUI 项目地址: https://gitcode.com/gh_mirrors/nm3/N_m3u8DL-CLI-SimpleG 一、场景定位:用户能力与需求匹配模型 三级…...

RCS 核心系统架构:AGV 调度“大脑”的底层逻辑
在现代智能物流与制造系统中,RCS(Robot Control System)作为 AGV 集群的核心调度中枢,扮演着"智慧大脑"的关键角色。不同于单台 AGV 的自主导航,RCS 需要解决多车协同、任务分配、路径规划与冲突避免等复杂问…...
)
Python MCP服务可观测性革命:OpenTelemetry+Prometheus+Grafana三件套零代码接入方案(附完整YAML模板)
第一章:Python MCP服务可观测性革命概述在微服务架构持续演进的今天,Python构建的MCP(Metrics, Context, and Propagation)服务正成为可观测性实践的关键载体。传统日志聚合与单点监控已难以应对跨服务调用链中上下文丢失、指标语…...

Air8101:低功耗-WiFi-UI_SoC模组介绍
一、模组概述 Air8101 是高性能 WiFi SoC 模组,支持2.4G WiFi6与BLE 5.4双模通信,兼容DVP/UVC摄像头接口,可实现200W像素拍照、100W像素录像(支持H.264编码及RTMP推流),搭载LuatOS,降低二次开发…...

vLLM显存优化实战:如何用enable-chunked-prefill和max_num_batched_tokens解决CUDA out of memory
vLLM显存优化实战:突破CUDA内存瓶颈的深度调优指南 当你在8张RTX 3090上部署大语言模型时,突然弹出的"Cuda out of memory"错误就像一场噩梦。这不是简单的内存不足警告,而是高性能计算环境中常见的显存管理挑战。本文将带你深入vL…...

weibo-rss:让微博内容主动找到你的高效订阅工具
weibo-rss:让微博内容主动找到你的高效订阅工具 【免费下载链接】weibo-rss 🍰 把喜欢的微博转为 RSS 订阅源 项目地址: https://gitcode.com/gh_mirrors/we/weibo-rss 在信息爆炸的时代,我们每天要处理大量碎片化内容。微博作为主流社…...

SenseVoice-Small ONNX精彩案例分享:10分钟会议录音→带标点可编辑文本
SenseVoice-Small ONNX精彩案例分享:10分钟会议录音→带标点可编辑文本 本文展示SenseVoice-Small ONNX语音识别工具在实际会议录音转写场景中的惊艳效果,通过真实案例演示如何将10分钟会议录音快速转换为带标点、可编辑的规范文本。 1. 案例背景与工具价…...

百考通:一站式计算机与工程类项目学习与精准开发平台
在信息技术高速发展的今天,无论是高校学生、编程爱好者还是行业从业者,都面临着项目实践资源分散、学习路径不清晰、开发效率低下的困境。百考通(https://www.baikaotongai.com) 应运而生,以一站式项目资源聚合平台的姿…...

EasyAnimation性能优化指南:确保动画流畅运行的7个关键点
EasyAnimation性能优化指南:确保动画流畅运行的7个关键点 【免费下载链接】EasyAnimation A Swift library to take the power of UIView.animateWithDuration(_:, animations:...) to a whole new level - layers, springs, chain-able animations and mixing view…...

STM32精准延时实现与Keil调试技巧
1. 精准延时在单片机开发中的重要性在STM32等嵌入式系统开发中,精准延时是基础但至关重要的功能。我最近调试一块自制的STM32开发板时,就遇到了需要精确控制时序的场景。比如在驱动LCD屏幕时,某些控制信号需要维持15ms的精确延时,…...