【C++面向对象编程】(二)this指针和静态成员
文章目录
- this指针和静态成员
- this指针
- 静态成员
this指针和静态成员
this指针
C++中类的成员变量和成员函数的存储方式有所不同:
- 成员变量:对象的成员变量直接作为对象的一部分存储在内存中。
- 成员函数:成员函数(非静态成员函数)不直接存储在对象的内存中。它们的代码(即函数体中的指令)存储在代码区中。
当我们创建一个类的多个对象时,这些对象的成员函数的代码是共享的,也就是说,无论我们创建多少个类的对象,这些函数的代码都只有一份。 但是,每个对象都有自己独立的成员变量。为了在这些共享的成员函数内部引用和修改特定对象的成员变量,C++提供了this指针。this指针是一个隐式的指针,它指向调用非静态成员函数的对象。
示例:
#include <iostream> class MyClass {
private: int myVar; public: MyClass(int value) : myVar(value) {}void printMyVar() { std::cout << "The value of myVar for this object is: " << this->myVar << std::endl; // this-> 可以不显式声明,编译器会自动为你处理.this->myVar可以改成myVar} void setMyVar(int newValue) { this->myVar = newValue; // 使用this指针来引用当前对象的myVar }
}; int main() { MyClass obj1(10);MyClass obj2(20);obj1.printMyVar(); // The value of myVar for this object is: 10 obj2.printMyVar(); // The value of myVar for this object is: 20 obj1.setMyVar(30); obj1.printMyVar(); // The value of myVar for this object is: 30 obj2.printMyVar(); // The value of myVar for this object is: 20,第二个对象的myVar保持不变 return 0;
}
在这个例子中,MyClass类的两个成员函数:printMyVar和setMyVar都通过this指针来引用和修改当前对象的成员变量。
在类的成员函数内部中,通常不需要显式声明this指针,因为编译器会自动处理。然而,在某些情况下,可以显式地使用this指针,例如:
- 通过
this指针区分成员变量和参数。 - 通过
this指针返回调用对象本身,实现链式调用。
示例
#include<iostream>
class MyClass {
private:int x;public:MyClass(int value) : x(value) {}// 使用this指针来区分成员变量和参数void setValue(int x) {this->x = x; }// 使用this指针返回调用对象本身MyClass& increment() {this->x++;return *this; // 返回*this即返回调用对象本身}int getValue() const {return x; }
};int main() {MyClass obj(5);obj.setValue(20);obj.increment().increment(); // 链式调用std::cout << obj.getValue() << std::endl; // 输出22return 0;
}
静态成员
类的非静态成员(包括成员变量和成员函数)是类的每个对象所独有的。每一个类的对象会拥有自己独立的内存空间来存储其非静态成员变量的值,并通过this指针来与非静态成员函数进行关联。每个对象在调用非静态成员函数时,都会通过this指针传递自己的地址给该函数,以便函数能够访问和修改该对象的成员变量。
类的静态成员(包括静态成员变量和静态成员函数)在所有类的对象之间是共享的,只存在于一个数据存储区域。静态成员不与类的任何特定对象相关联。因此,静态成员函数内部没有this指针的概念。
静态数据成员: 在类的所有对象之间共享其值。在C++17之前,静态数据成员只能在类外进行初始化。C++17之后可以使用内联关键字inline 在类内初始化静态数据成员。
类外初始化静态数据成员:
class MyClass {
public:static int count; // 声明静态数据成员MyClass() {count++; }~MyClass() {count--; }
};// 在类外初始化静态数据成员
int MyClass::count = 0;int main() {MyClass obj1; // 构造时,count 增加到 1MyClass obj2; // 构造时,count 增加到 2std::cout << MyClass::count << std::endl; // 输出 2return 0;
}
使用C++17新增的inline 在类内初始化静态数据成员:
#include <iostream> class MyClass {
public: // 使用内联变量语法在类内部声明并初始化静态数据成员inline static int count = 0;MyClass() { count++;} ~MyClass() { count--; }
}; int main() { MyClass obj1; // 构造时,count 增加到 1 MyClass obj2; // 构造时,count 增加到 2 std::cout << MyClass::count << std::endl; // 输出 2 return 0;
}
静态成员函数: 可以通过任何对象的实例或类名来调用,但是不能访问类的非静态成员。
#include <iostream>
#include <string> class MyClass {
private: int nonStaticVar; // 非静态成员变量 inline static int staticVar = 42; // 静态成员变量public: MyClass(int value) : nonStaticVar(value) {} // 静态成员函数 static void printStaticVar() { std::cout << "The value of staticVar is: " << staticVar << std::endl; // 尝试通过静态成员函数访问非静态成员变量会导致编译错误 // std::cout << "The value of staticVar is: " << nonStaticVar << std::endl; } // 非静态成员函数 void printVars() { std::cout << "The value of staticVar is: " << staticVar << std::endl; std::cout << "The value of nonStaticVar is: " << nonStaticVar << std::endl; }
}; int main() { MyClass obj(10); // 通过类名调用静态成员函数 MyClass::printStaticVar(); // The value of staticVar is: 42 // 通过对象实例调用静态成员函数obj.printStaticVar(); // The value of staticVar is: 42 // 调用非静态成员函数 obj.printVars(); // The value of staticVar is: 42 //The value of nonStaticVar is: 10return 0;
}
相关文章:
this指针和静态成员)
【C++面向对象编程】(二)this指针和静态成员
文章目录 this指针和静态成员this指针静态成员 this指针和静态成员 this指针 C中类的成员变量和成员函数的存储方式有所不同: 成员变量:对象的成员变量直接作为对象的一部分存储在内存中。成员函数:成员函数(非静态成员函数&am…...
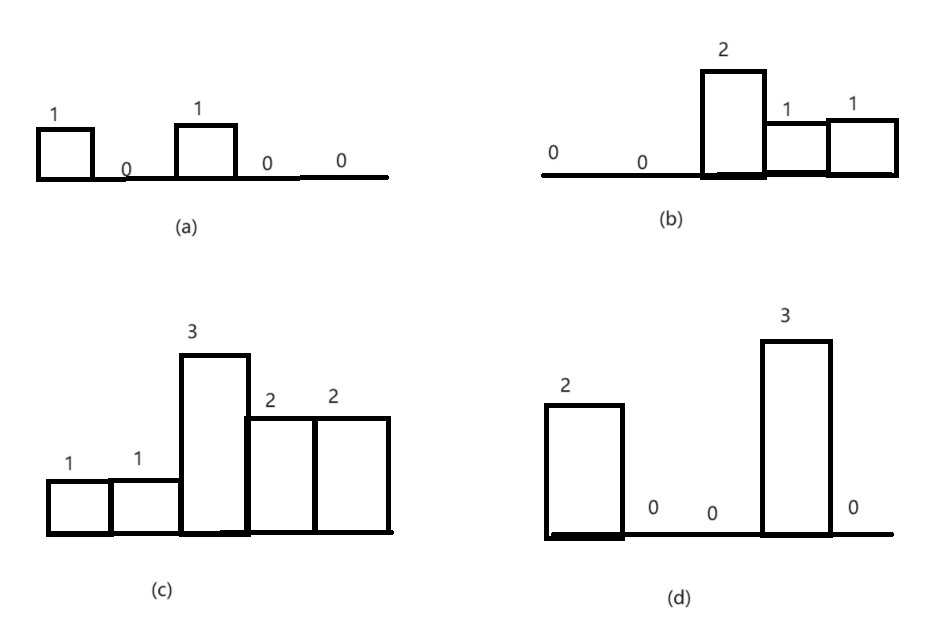
最大矩形问题
柱状图中最大的矩形 题目 分析 矩形的面积等于宽乘以高,因此只要能确定每个矩形的宽和高,就能计算它的面积。如果直方图中一个矩形从下标为 i 的柱子开始,到下标为 j 的柱子结束,那么这两根柱子之间的矩形(含两端的柱…...

LeetCode62不同路径
题目描述 一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish” )。问总共有多少条不同的路径? …...

GNU Radio实现OFDM Radar
文章目录 前言一、GNU Radio Radar Toolbox编译及安装二、ofdm radar 原理讲解三、GNU Radio 实现 OFDM Radar1、官方提供的 grc①、grc 图②、运行结果 2、修改后的便于后续可实现探测和通信的 grc①、grc 图②、运行结果 四、资源自取 前言 本文使用 GNU Radio 搭建 OFDM Ra…...

东方博宜1760 - 整理抽屉
题目描述 期末考试即将来临,小T由于同时肩负了学习、竞赛、班团活动等多方面的任务,一直没有时间好好整理他的课桌抽屉,为了更好地复习,小T首先要把课桌抽屉里的书分类整理好。 小T的抽屉里堆着 N 本书,每本书的封面上…...
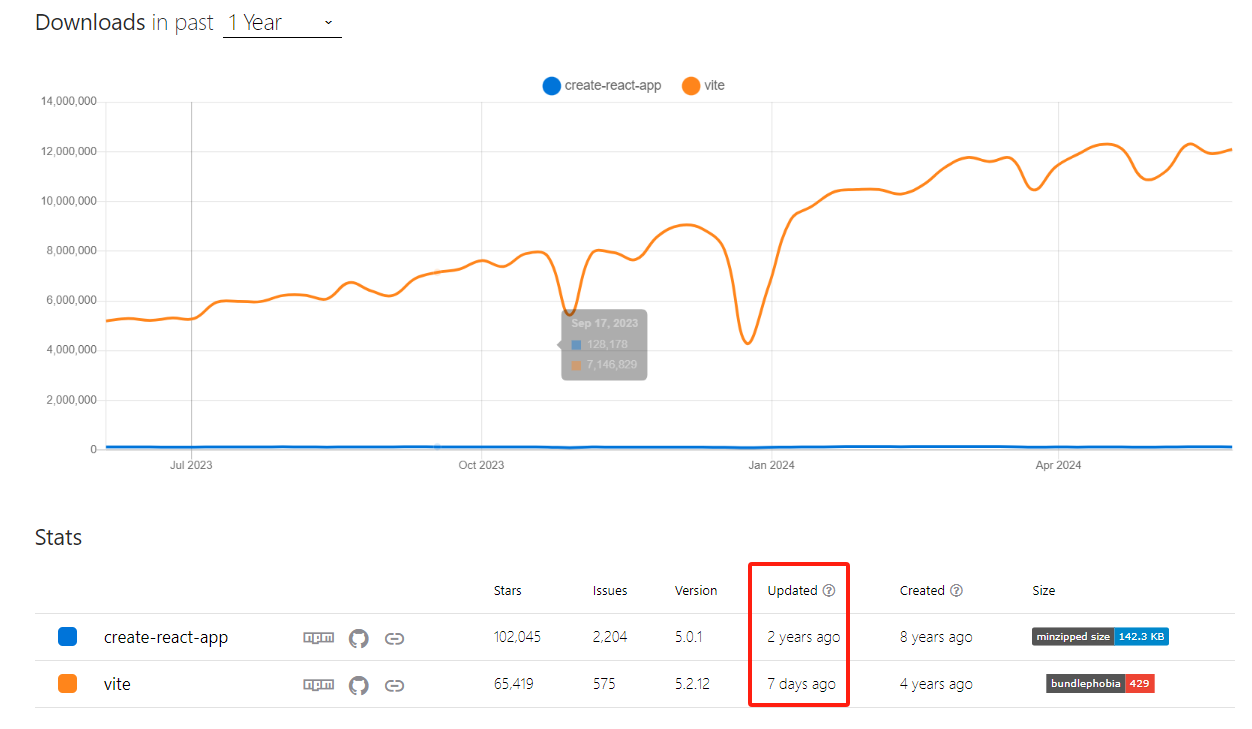
react快速开始(四)-之Vite 还是 (Create React App) CRA? 用Vite创建项目
文章目录 react快速开始(四)-之Vite 还是 (Create React App) CRA? 用Vite创建项目背景Vite 和 (Create React App) CRAVite?Vite 是否支持 TypeScript? 用Vite创建react项目参考 react快速开始(四)-之Vite 还是 (Create React App) CRA? 用Vite创建项…...
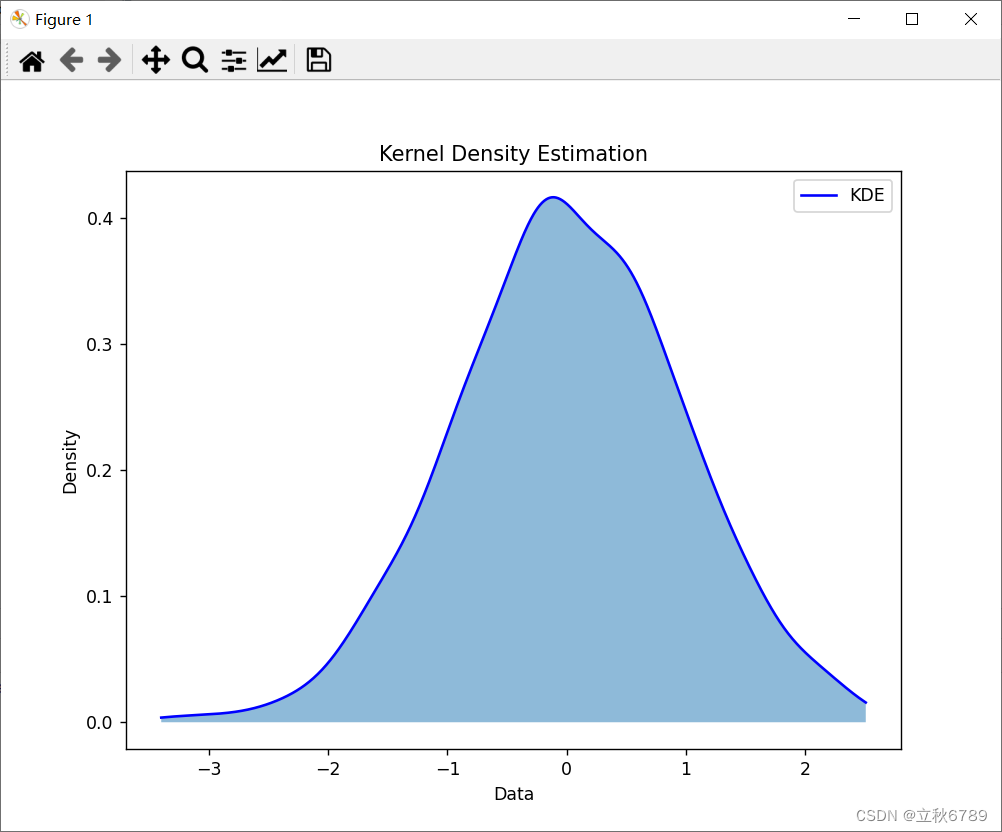
使用python绘制核密度估计图
使用python绘制核密度估计图 核密度估计图介绍效果代码 核密度估计图介绍 核密度估计(Kernel Density Estimation,KDE)是一种用于估计数据概率密度函数的非参数方法。与直方图不同,KDE 可以生成平滑的密度曲线,更好地…...
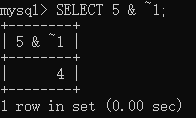
5. MySQL 运算符和函数
文章目录 【 1. 算术运算符 】【 2. 逻辑运算符 】2.1 逻辑非 (NOT 或者 !)2.2 逻辑与运算符 (AND 或者 &&)2.3 逻辑或 (OR 或者 ||)2.4 异或运算 (XOR) 【 3. 比较运算符 】3.1 等于 3.2 安全等于运算符 <>3.3 不等于运算符 (<> 或者 !)3.4 小于等于运算符…...

Linux学习之vi文本编辑器的使用
天行健,君子以自强不息;地势坤,君子以厚德载物。 每个人都有惰性,但不断学习是好好生活的根本,共勉! 文章均为学习整理笔记,分享记录为主,如有错误请指正,共同学习进步。…...

【数据结构】链表与顺序表的比较
不同点: 顺序表和链表是两种常见的数据结构,他们的不同点在于存储方式和插入、删除操作、随机访问、cpu缓存利用率等方面。 一、存储方式不同: 顺序表: 顺序表的存储方式是顺序存储,在内存中申请一块连续的空间,通…...

dart 基本语法
//入口方法 main() 或 void main() //数据类型 原生数据类型 String int double bool null 注意:String 包函 ‘’ “” ‘’’ ‘’’ 三种形式复杂数据类型 list Set Map自定义数据类型 class inheritance动态数据类型 var 注:dart 是静态类型语言&a…...
)
【经验分享】嵌入式入坑经历(选段)
文章目录 你现在的工作中所用到的专业知识有哪些呢?为什么想转行了?后来为什么从事了嵌入式行业呢?你对嵌入式的兴趣是何时培养起来的?你是怎么平衡兴趣爱好和工作的关系的?平时做的事情对你现在的工作有哪些帮助?对于有志学习嵌入式开发的在校大学生…...

Docker面试整理-Docker与虚拟机的区别是什么?
Docker 容器和传统的虚拟机(VM)都是提供隔离的运行环境以部署和运行应用程序的技术,但它们在架构和性能上存在显著的不同。了解这些差异可以帮助你选择最适合特定需求的解决方案: 基础架构:虚拟机:每个虚拟机都包括完整的操作系统、应用程序、必需的库和二进制文件,运行在…...

Java:JDK8 GC中ParNew和CMS的问题说明
JDK8中常用如下的垃圾收集器,它们分别运用在年轻代和老年代: ParNew : 年轻代垃圾收集器,多线程,采用标记—复制算法。 CMS:老年代的收集器,全称(Concurrent Mark and Sweep)&#…...
学单片机前先学什么?
先学c语言和数字电路 这里默认你说的单片机是51单片机,通过你的问题,我猜你的单片机应该还没有入门,如果是入门的话,一般都是从51单片机开始的。刚好我有一些资料,是我根据网友给的问题精心整理了一份「单片机的资料从…...

数据可视化:Matplotlib 与 Seaborn
数据可视化是数据分析中至关重要的一部分,它能帮助我们直观地理解数据的分布、趋势和关系。Python 中,Matplotlib 和 Seaborn 是两个最常用的可视化库。本文将详细介绍如何使用 Matplotlib 和 Seaborn 进行数据可视化,包括基本图形、图形定制…...

【linux】自定义快捷命令/脚本
linux自定义快捷命令 场景自定义命令自定义脚本 场景 深度学习经常要切换到自己环境,conda activate mmagic,但是又不想每次重复打这么多字,想使用快捷命令直接切换。 自定义命令 使用别名(alias)或自定义脚本来创建…...

使用onnxruntime加载YOLOv8生成的onnx文件进行目标检测
在网上下载了60多幅包含西瓜和冬瓜的图像组成melon数据集,使用 LabelMe 工具进行标注,然后使用 labelme2yolov8 脚本将json文件转换成YOLOv8支持的.txt文件,并自动生成YOLOv8支持的目录结构,包括melon.yaml文件,其内容…...
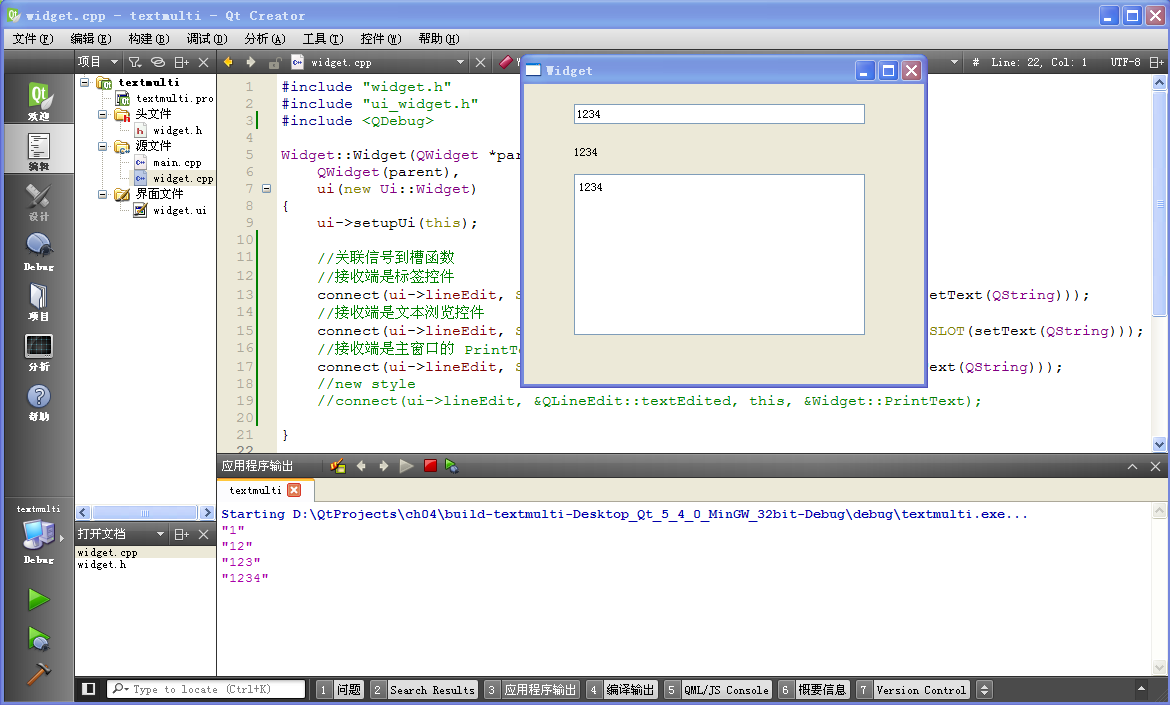
QT 信号和槽 一对多关联示例,一个信号,多个槽函数响应,一个信号源如何绑定多个槽函数
在窗体里放置一个单行文本编辑控件(QLineEdit)、一个标签控件(QLabel)和一个文本浏览控件(QTextBrowser),在单行文 本编辑控件里的文本被编辑时,标签控件和文本浏览控件都会同步显示…...

C++ AVL树 详细讲解
目录 一、AVL树的概念 二、AVL树的实现 1.AVL树节点的定义 2.AVL树的插入 3.AVL树的旋转 4.AVL树的验证 三、AVL树的性能 四、完结撒❀ 一、AVL树的概念 二叉搜索树虽可以缩短查找的效率,但 如果数据有序或接近有序二叉搜索树将退化为单支树,查 …...

FPGA设计中的组合逻辑环:为什么你的Verilog代码会引发警告?
FPGA设计中的组合逻辑环:为什么你的Verilog代码会引发警告? 在数字电路设计的浩瀚海洋中,组合逻辑环(Combinational Loop)就像是一个潜伏的暗礁,看似无害却可能让你的整个设计"触礁沉没"。作为一…...

Phi-3-mini-128k-instruct与智能车仿真:生成自然语言控制逻辑与调试报告
Phi-3-mini-128k-instruct与智能车仿真:生成自然语言控制逻辑与调试报告 最近在折腾一个智能车仿真项目,发现一个挺有意思的事儿:让AI来帮忙写控制逻辑和看报告,效率提升了不少。以前我们得手动把“绕过前面那个障碍物࿰…...

自编码器在异常检测中的实战应用:以金融交易数据为例
自编码器在金融异常检测中的实战指南:从数据清洗到模型部署 金融交易数据中的异常行为检测一直是风险控制的核心环节。传统基于规则的系统难以应对日益复杂的欺诈模式,而自编码器这类无监督学习模型正在改变游戏规则。本文将带您从零构建一个完整的异常检…...

G-Helper:华硕笔记本轻量化控制工具全面解析与实战指南
G-Helper:华硕笔记本轻量化控制工具全面解析与实战指南 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops. Control tool for ROG Zephyrus G14, G15, G16, M16, Flow X13, Flow X16, TUF, Strix, Scar and other models 项目地…...

MinerU 2.5-1.2B新手教程:无需深度学习基础,快速上手PDF提取
MinerU 2.5-1.2B新手教程:无需深度学习基础,快速上手PDF提取 1. 引言:为什么选择MinerU? PDF文档是我们日常工作和学习中常见的文件格式,但要从PDF中提取内容却常常让人头疼。特别是遇到学术论文、技术报告这类包含复…...

如何高效提取Wallpaper Engine资源:RePKG完整使用指南
如何高效提取Wallpaper Engine资源:RePKG完整使用指南 【免费下载链接】repkg Wallpaper engine PKG extractor/TEX to image converter 项目地址: https://gitcode.com/gh_mirrors/re/repkg RePKG是一款专为Wallpaper Engine设计的专业资源提取工具…...

CBoard自研多维引擎揭秘:轻量级架构如何撬动大数据分析
CBoard自研多维引擎揭秘:轻量级架构如何撬动大数据分析 【免费下载链接】CBoard CBoard - 这是一个基于 Node.js 的开源面板,用于管理 Kubernetes 集群和应用程序。适用于 Kubernetes 集群管理、容器编排、持续集成等场景。 项目地址: https://gitcode…...

SerialMP3库:GD3300D/TD5580A串口MP3模块驱动详解
1. SerialMP3 库概述:面向 GD3300D/TD5580A 串口 MP3 播放模块的嵌入式驱动框架SerialMP3 是一个专为基于 GD3300D 或 TD5580A 音频解码芯片的串口 MP3 播放板设计的 Arduino 兼容库。该库并非通用音频处理中间件,而是一个硬件协议抽象层(Har…...

终极指南:使用Refine和Ant Design快速构建专业列表页面
终极指南:使用Refine和Ant Design快速构建专业列表页面 【免费下载链接】refine 一个用于构建内部工具、管理面板、仪表盘和B2B应用程序的React框架,具有无与伦比的灵活性。 项目地址: https://gitcode.com/GitHub_Trending/re/refine Refine是一…...

USBToolBox高效管理实战指南:多设备USB映射自动化配置全流程
USBToolBox高效管理实战指南:多设备USB映射自动化配置全流程 【免费下载链接】tool the USBToolBox tool 项目地址: https://gitcode.com/gh_mirrors/too/tool 在现代多设备办公环境中,USB映射(将物理USB端口映射为系统可识别的逻辑设…...