[ROS 系列学习教程] 建模与仿真 - 使用 Arbotix 控制机器人

ROS 系列学习教程(总目录)
本文目录
- 一、Arbotix 简介
- 二、安装Arbotix
- 三、配置Arbotix控制器
- 四、配置launch启动文件
- 五、数据交互接口
- 六、在rviz中仿真控制机器人
- 6.1 直接发topic控制
- 6.2 使用键盘控制
- 6.3 编写代码控制机器人移动
前面讲了机器人的建模,是静态的,接下来介绍对机器人的仿真控制,让你的机器人动起来。
一、Arbotix 简介
Arbotix 是一款控制电机、舵机的硬件控制板,并提供相应的 ros 功能包,是一款基于 ROS的机器人控制系统,它旨在为小型机器人提供硬件控制和传感器接口,以便于机器人的运动和感知。它不仅可以驱动真实的 arbotix 控制板,还提供一个差速控制器,通过接收速度控制指令更新机器人的 joint 状态,从而帮助我们实现机器人在仿真环境中的运动。
它的源代码可以在这个里得到:https://github.com/vanadiumlabs/arbotix_ros
arbotix_ros 源码包含如下几部分:

其中,
arbotix_controllers:控制器,现已合并到arbotix_python中。arbotix_firmware:处理与 ArbotiX-ROS 绑定通信的固件源代码。arbotix_msgs:ArbotiX 的消息和服务定义。arbotix_python:驱动程序、用于与驱动程序交互的 GUI 以及用于设置伺服电器的终端工具。arbotix_sensors:包含几个传感器模块,可在 arbotix_python 的基本结构上添加额外的 ROS 接口层。
我们主要使用 arbotix_python 的驱动程序模块 arbotix_driver 中的差速底盘控制器 diff_controller。
更多关于 Arbotix 的信息见 https://wiki.ros.org/arbotix
关于 diff_controller 的信息见 http://wiki.ros.org/arbotix_python/diff_controller
二、安装Arbotix
对于 ROS1 ,有两种安装方法,命令行和源码安装。
-
命令行安装
sudo apt install ros-<<VersionName()>>-arbotix* -
源码安装
首先在你的工作空间的
src目录下下载源代码:git clone https://github.com/vanadiumlabs/arbotix_ros.git然后编译即可使用
Arbotixcatkin_make # 编译
三、配置Arbotix控制器
Arbotix 针对不同的机器人,需要配置不同的控制器,配置文件为 yaml 格式,如下:
# 该文件是控制器配置,一个机器人模型可能有多个控制器,比如: 底盘、机械臂、夹持器(机械手)....
# 因此,根 name 是 controllers
controllers: {# 单控制器设置base_controller: {# 类型: 差速控制器type: diff_controller,# 参考坐标base_frame_id: base_link,# 两个轮子之间的间距,单位:mbase_width: 0.38,# 机器人每移动一米,电机编码器所记录的脉冲数ticks_meter: 2000,# PID控制参数,使机器人车轮快速达到预期速度Kp: 12,Kd: 12,Ki: 0,Ko: 50,# 加速度限制accel_limit: 1.0}
}
四、配置launch启动文件
启动时 Arbotix 会作为一个节点加入到 ROS Master 中,我们使用 launch 文件配置快速启动。
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen"><rosparam file="$(find simulation_learning)/config/mbot_arbotix.yaml" command="load" /><param name="sim" value="true"/>
</node>
其中,节点名注册为 arbotix,包名为 arbotix_python,节点可执行文件名为 arbotix_driver;rosparam 一行是载入上文的 Arbotix 配置文件;Arbotix 不仅可以用于真实控制板,也可以用于仿真环境,如用于仿真,需将参数 sim 设置为 true。
五、数据交互接口
该节点订阅一个话题:/cmd_vel,用于接收对机器人的速度控制信息
消息格式为:geometry_msgs/Twist
geometry_msgs/Vector3 linear # 机器人三轴线速度float64 xfloat64 yfloat64 z
geometry_msgs/Vector3 angular # 机器人三轴角速度float64 xfloat64 yfloat64 z
发布一个话题:/odom,用于发布机器人里程计信息,包括定位与速度等信息
消息格式为:nav_msgs/Odometry
std_msgs/Header headeruint32 seq # 消息序列号time stamp # 时间戳string frame_id # 消息帧id
string child_frame_id
geometry_msgs/PoseWithCovariance posegeometry_msgs/Pose posegeometry_msgs/Point position # 机器人位置坐标float64 xfloat64 yfloat64 zgeometry_msgs/Quaternion orientation # 机器人方向的四元数表示float64 xfloat64 yfloat64 zfloat64 wfloat64[36] covariance # 6x6协方差矩阵的行主表示
geometry_msgs/TwistWithCovariance twistgeometry_msgs/Twist twistgeometry_msgs/Vector3 linear # 机器人三轴线速度float64 xfloat64 yfloat64 zgeometry_msgs/Vector3 angular # 机器人三轴角速度float64 xfloat64 yfloat64 zfloat64[36] covariance # 6x6协方差矩阵的行主表示
其中6x6协方差矩阵,用于量化位姿估计不确定性。这个矩阵对角线上的元素分别代表了位置与方向估计值的方差,而矩阵的非对角线元素则表示了位置与方向各估计值之间的协方差。矩阵各向量依次表示 (x,y,z,绕x轴旋转,绕y轴旋转,围绕z轴旋转)的估计不确定性。
有了这两个话题,我们就可以控制并获取机器人的位姿了。
六、在rviz中仿真控制机器人
使用前文 URDF建模实践 创建的机器人模型,在 launch 文件中添加 Arbotix 节点的启动配置,启动后如下图:

6.1 直接发topic控制
发布 /cmd_vel 话题控制机器人移动,并订阅 /odom 显示机器人的实时位置与速度信息:

6.2 使用键盘控制
运行ROS提供的键盘控制包,控制机器人移动:

6.3 编写代码控制机器人移动
写两个节点,一个发布速度,一个订阅里程计,如下:
move.cpp 用于发布速度:
#include "ros/ros.h"
#include "geometry_msgs/Twist.h"geometry_msgs::Twist moveRobot(const double& linear, const double& angular)
{geometry_msgs::Twist msg;msg.linear.x = linear;msg.linear.y = 0.0;msg.linear.z = 0.0;msg.angular.x = 0.0;msg.angular.y = 0.0;msg.angular.z = angular;ROS_INFO("moveRobot, linear: %.3lf, angular: %.1lf", linear, angular*180/M_PI);return msg;
}int main(int argc, char **argv)
{ros::init(argc, argv, "move_robot");ros::NodeHandle nh;ros::Publisher velPub = nh.advertise<geometry_msgs::Twist>("/cmd_vel", 10);ros::Rate r(1);while (ros::ok()){velPub.publish(moveRobot(0.5, -0.3));ros::Duration(3.0).sleep();velPub.publish(moveRobot(-0.5, -0.3));ros::Duration(3.0).sleep();r.sleep();}return 0;
}
odom.cpp 用于订阅里程计:
#include "ros/ros.h"
#include "nav_msgs/Odometry.h"void odomCallback(const nav_msgs::Odometry::ConstPtr& msg)
{geometry_msgs::Quaternion q = msg->pose.pose.orientation;ROS_INFO("pose: [%.2lf, %.2lf, %.1lf], linear: %.2lf, angular: %.2lf", msg->pose.pose.position.x, msg->pose.pose.position.y, std::atan2(2.0 * (q.w * q.z + q.x * q.y), 1.0 - 2.0 * (q.y * q.y + q.z * q.z))*180/M_PI, msg->twist.twist.linear.x, msg->twist.twist.angular.z*180/M_PI);
}int main(int argc, char **argv)
{ros::init(argc, argv, "robot_odom");ros::NodeHandle nh;ros::Subscriber odomSub = nh.subscribe<nav_msgs::Odometry>("/odom", 10, odomCallback);ros::spin();return 0;
}
CMakeList.txt 中添加内容:
add_executable(move_robot_node src/move.cpp)
add_executable(robot_odom_node src/odom.cpp)target_link_libraries(move_robot_node${catkin_LIBRARIES}
)target_link_libraries(robot_odom_node${catkin_LIBRARIES}
)
启动 rviz 后,运行 move_robot_node 和 robot_odom_node ,如下:
相关文章:
[ROS 系列学习教程] 建模与仿真 - 使用 Arbotix 控制机器人
ROS 系列学习教程(总目录) 本文目录 一、Arbotix 简介二、安装Arbotix三、配置Arbotix控制器四、配置launch启动文件五、数据交互接口六、在rviz中仿真控制机器人6.1 直接发topic控制6.2 使用键盘控制6.3 编写代码控制机器人移动 前面讲了机器人的建模,是静态的&…...

java:使用JSqlParser给sql语句增加tenant_id和deleted条件
# 示例代码 【pom.xml】 <dependency><groupId>com.baomidou</groupId><artifactId>mybatis-plus-core</artifactId><version>3.4.3.1</version> </dependency>【MyJSqlParserTest.java】 package com.chz.myJSqlParser;pu…...

华三HCL模拟器安装及华三防火墙配置
0、前言 最近跟模拟器杠上了,主要是需要运行防火墙,目前已经成功模拟出华为、山石防火墙,而且模拟出来的设备能与物理网络环境进行互联。现在我又盯上华三防火墙了。 首先下载模拟器: 下载地址:H3C网络设备模拟器官方免…...
MySQL基础---库的操作和表的操作(配着自己的实操图,简单易上手)
绪论 勿问成功的秘诀为何,且尽全力做您应该做的事吧。–美华纳;本章是MySQL的第二章,本章主要写道MySQL中库和表的增删查改以及对库和表的备份处理,本章是基于上一章所写若没安装mysql可以查看Linux下搭建mysql软件及登录和基本…...
【6】第一个Java程序:Hello World
一、引言 Java,作为一种广泛使用的编程语言,其强大的跨平台能力和丰富的库函数使其成为开发者的首选。对于初学者来说,编写并运行第一个Java程序是一个令人兴奋的时刻。本文将指导你使用Eclipse这一流行的集成开发环境(IDE&#…...
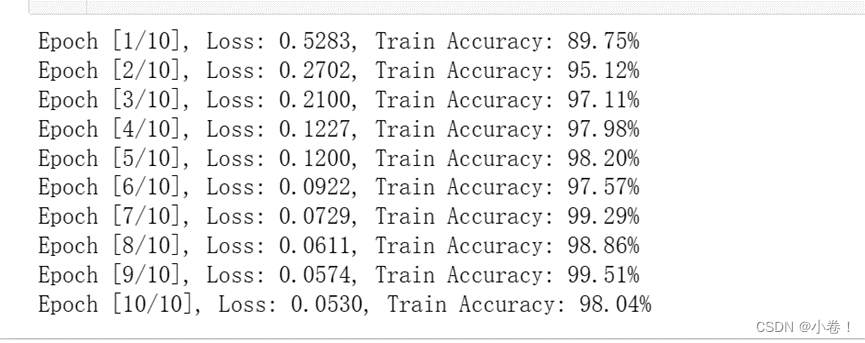
pytorch神经网络训练(AlexNet)
导包 import osimport torchimport torch.nn as nnimport torch.optim as optimfrom torch.utils.data import Dataset, DataLoaderfrom PIL import Imagefrom torchvision import models, transforms 定义自定义图像数据集 class CustomImageDataset(Dataset): 定义一个自…...

构建大语言模型友好型网站
以大语言模型为代表的AI 技术迅速发展,将会影响原有信息网络的方式。其中一个明显的趋势是通过chatGPT 对话代替搜索引擎和浏览器来获取信息。 互联网时代,主要是通过网站(website)提供信息。网站主要为人类阅读的方式构建的。主要…...
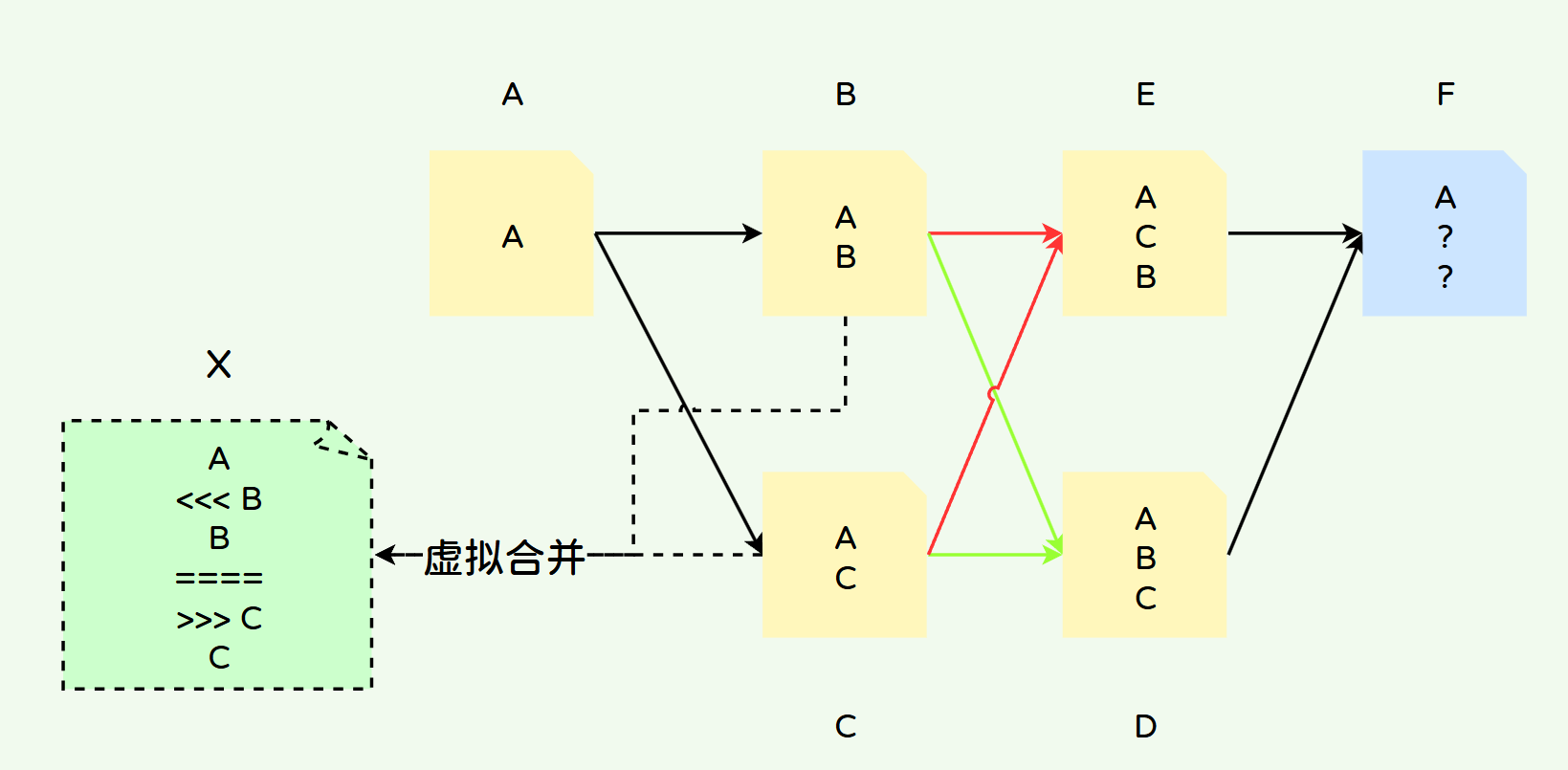
Git代码冲突原理与三路合并算法
Git代码冲突原理 Git合并文件是以行为单位进行一行一行合并的,但是有些时候并不是两行内容不一样Git就会报冲突,这是因为Git会帮助我们进行分析得出哪个结果是我们所期望的最终结果。而这个分析依据就是三路合并算法。当然,三路合并算法并不…...

聆思CSK6大模型开发板英语评测类开源SDK详解
离线英文评测算法SDK 能力简介 CSK6 大模型开发套件可以对用户通过语音输入的英文单词进行精准识别,并对单词的发音、错读、漏读、多读等方面进行评估,进行音素级的识别,根据用户的发音给出相应的建议和纠正,帮助用户更好地掌握单…...
通用大模型VS垂直大模型,你更青睐哪一方?
这里写目录标题 一、通用大模型简介二、垂直大模型简介三、通用大模型与垂直大模型的比较四、如何选择适合的模型五、通用大模型和垂直大模型的应用场景六、总结 近年来,随着人工智能技术的飞速发展,大模型的应用越来越广泛。无论是自然语言处理、计算机…...
Python第二语言(十四、高阶基础)
目录 1. 闭包 1.1 使用闭包注意事项 1.2 小结 2. 装饰器:实际上也是一种闭包; 2.1 装饰器的写法(闭包写法) :基础写法,只是解释装饰器是怎么写的; 2.2 装饰器的语法糖写法:函数…...

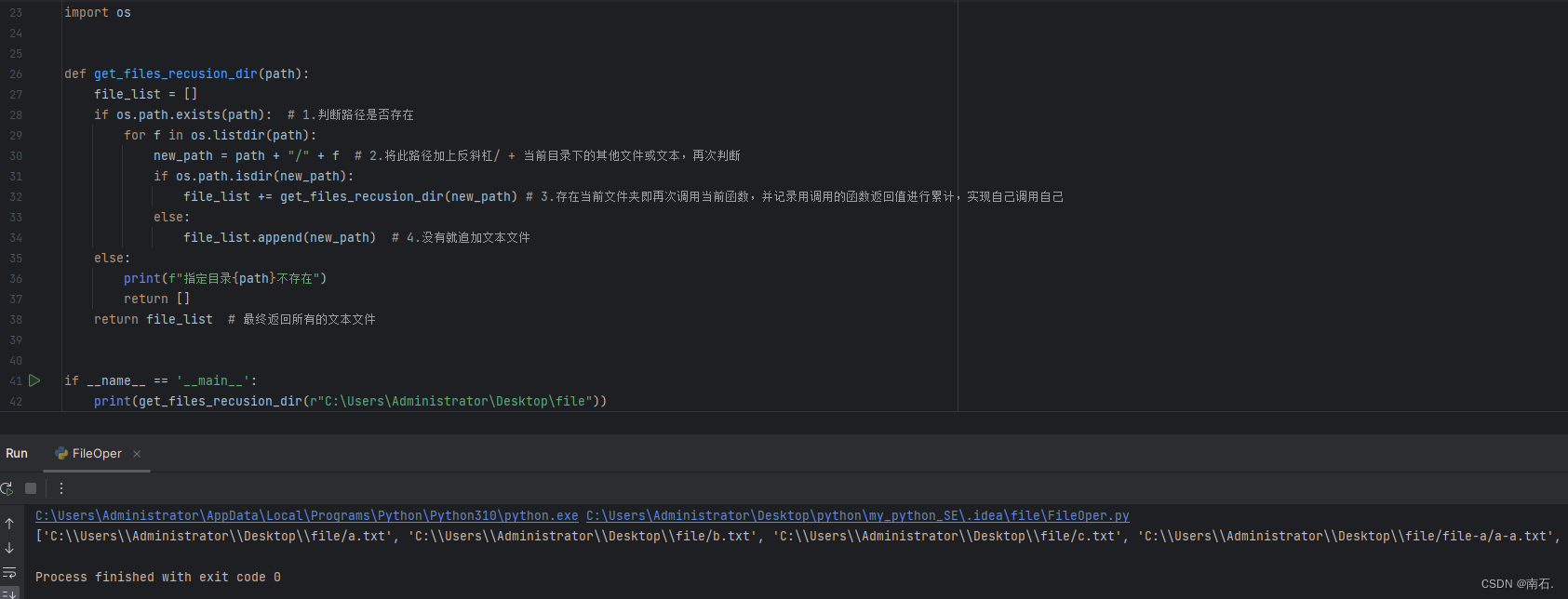
python脚本之调用其他目录脚本
import sys# 添加新路径到搜索路径中 sys.path.append(/脚本父级)# 现在可以导入该路径下的模块了 from 脚本 import 方法方法()...
定义及其使用)
C# 事件(Event)定义及其使用
1.定义个委托和类 //委托 public delegate void ProductEventHandler(Product product);/// <summary> /// 产品 /// </summary> public class Product {public int Id { get; set; }public string Code { get; set; }public string Name { get; set; }private de…...

2.负载压力测试
负载压力测试是一种重要的系统测试方法,旨在评估系统在正常和峰值负载情况下的性能表现。 一、基本概念: 负载压力测试是在一定约束条件下,通过模拟实际用户访问系统的行为,来测试系统所能承受的并发用户数、运行时间、数据量等&…...
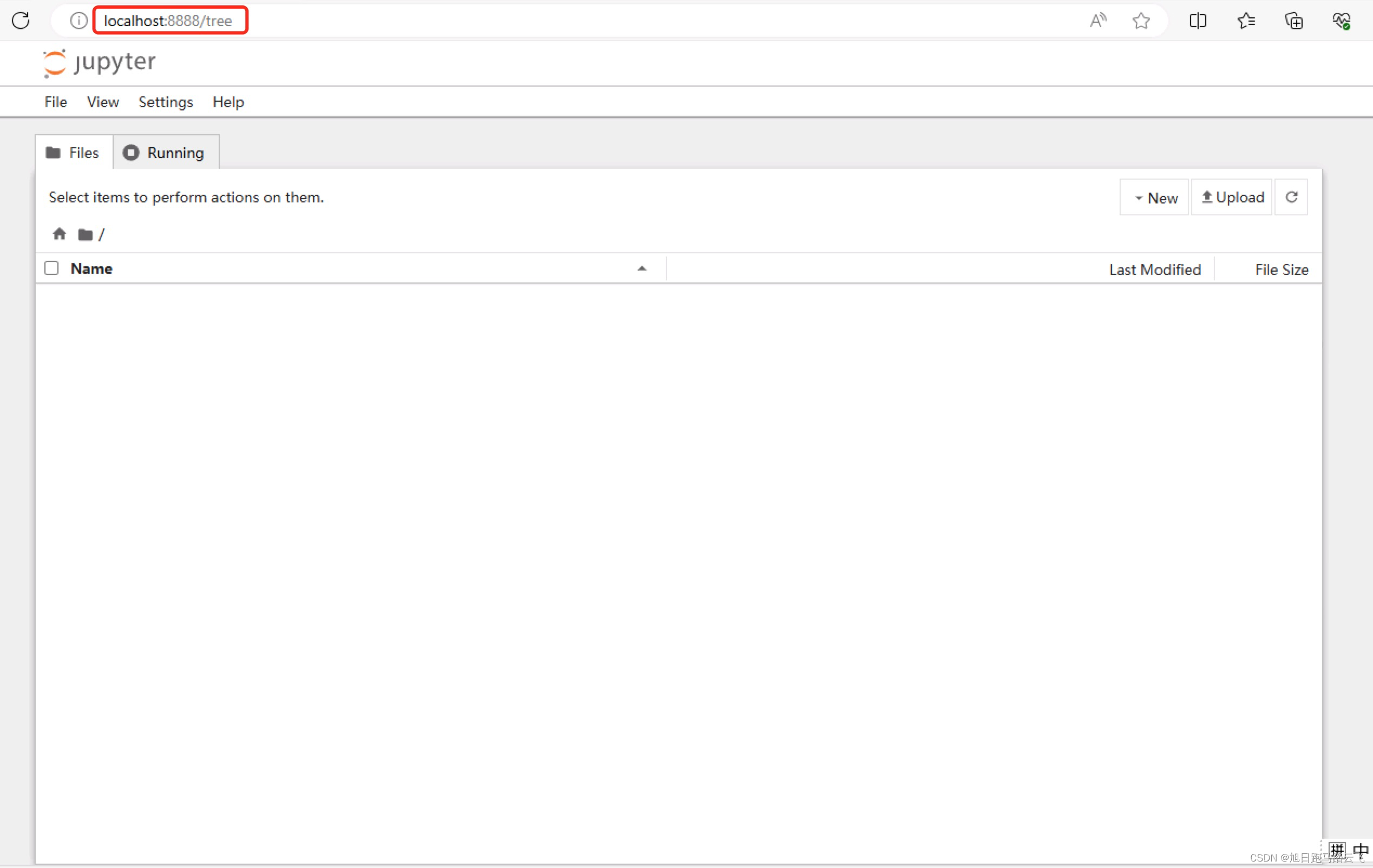
【AI工具】jupyter notebook和jupyterlab对比和安装
简单说,jupyterlab是jupyter notebook的下一代。 选择安装一个即可。 一、这里是AI对比介绍 Jupyter Notebook和JupyterLab都是基于Jupyter内核的交互式计算环境,但它们在设计和功能上有一些关键的区别: 用户界面: Jupyter Not…...

Linux 基本指令3
date指令 date[选项][格式] %Y--年 %m--月 %d--日 %H--小时 %M--分 %S--秒 中间可用其他符号分割,不能使用空格。 -s 设置时间,会返回设置时间的信息并不是改变当前时间 设置全部时间年可用-或者:分割日期和时间用空格分隔ÿ…...
、PEM格式的公钥和PEM格式的私钥。)
在Linux系统中,可以使用OpenSSL来生成CSR(Certificate Signing Request)、PEM格式的公钥和PEM格式的私钥。
在Linux系统中,可以使用OpenSSL来生成CSR(Certificate Signing Request)、PEM格式的公钥和PEM格式的私钥。以下是生成这些文件的命令: 首先,生成私钥(通常是以.key结尾,但可以转换成PEM格式&am…...

【2024最新华为OD-C/D卷试题汇总】[支持在线评测] 团队派遣(100分) - 三语言AC题解(Python/Java/Cpp)
🍭 大家好这里是清隆学长 ,一枚热爱算法的程序员 ✨ 本系列打算持续跟新华为OD-C/D卷的三语言AC题解 💻 ACM银牌🥈| 多次AK大厂笔试 | 编程一对一辅导 👏 感谢大家的订阅➕ 和 喜欢💗 🍓OJ题目截图 📎在线评测链接 团队派遣(100分) 🌍 评测功能需要订阅专栏…...

Python数据分析与机器学习在医疗诊断中的应用
文章目录 📑引言一、数据收集与预处理1.1 数据收集1.2 数据预处理 二、特征选择与构建2.1 特征选择2.2 特征构建 三、模型选择与训练3.1 逻辑回归3.2 随机森林3.3 深度学习 四、模型评估与调优4.1 交叉验证4.2 超参数调优 五、模型部署与应用5.1 模型保存与加载5.2 …...
vite.config.js如何使用env的环境变量
了解下环境变量在vite中 官方文档走起 https://cn.vitejs.dev/guide/env-and-mode.html#env-variables-and-modes 你见到的.env,.env.production等就是放置环境变量的 官方文档说到.env.[mode] # 只在指定模式下加载,比如.env.development只在开发环境加载 至于为什么是deve…...
)
从‘torch not found’到成功训练:一个YOLOv8环境配置的完整避坑实录(含CUDA/cuDNN版本选择)
YOLOv8环境配置终极指南:从版本匹配到显存优化的全流程实战 在计算机视觉领域,YOLOv8作为目标检测的标杆算法,其安装配置过程却常常成为开发者的"拦路虎"。本文将带你系统解决从PyTorch版本选择、CUDA环境配置到显存优化的全链路问…...

QKeyMapper:Windows终极按键映射工具,无需重启立即生效
QKeyMapper:Windows终极按键映射工具,无需重启立即生效 【免费下载链接】QKeyMapper [按键映射工具] QKeyMapper,Qt开发Win10&Win11可用,不修改注册表、不需重新启动系统,可立即生效和停止,新增虚拟游戏…...
+ NVIDIA Container Toolkit)
Phi-4-mini-reasoning部署教程:容器化打包(Dockerfile)+ NVIDIA Container Toolkit
Phi-4-mini-reasoning部署教程:容器化打包(Dockerfile) NVIDIA Container Toolkit 1. 项目概述 Phi-4-mini-reasoning是微软推出的3.8B参数轻量级开源模型,专为数学推理、逻辑推导、多步解题等强逻辑任务设计。这款模型主打&quo…...

GitHub功能全景:从代码创作到企业级方案的技术生态
【导语:GitHub作为全球知名的代码托管平台,提供了丰富多样的功能,涵盖AI代码创作、开发者工作流、应用程序安全等多个领域,还针对不同规模公司、用例和行业提供解决方案,对软件开发行业产生着深远影响。】【GitHub的多…...

一文读懂:控制界的万能公式——PID算法到底是什么?
一文读懂:控制界的万能公式——PID算法到底是什么? 对于每一位踏入工科大门的学生或是初入职场的工程师来说,在自动控制、机器人、电子工程等领域,有一个名字几乎如影随形——PID算法。从天上飞的四轴无人机,到地上跑的平衡小车;从化工厂里庞大的反应釜,到你家中安静运转…...

MinerU智能文档理解镜像:财务报表自动识别实战体验
MinerU智能文档理解镜像:财务报表自动识别实战体验 1. 引言:财务文档处理的痛点与机遇 在财务工作中,我们经常需要处理各种格式的财务报表——PDF扫描件、Excel截图、纸质文档照片等。传统的手工录入方式不仅效率低下,还容易出错…...

Chandra AI在教育领域的应用:智能学习助手开发
Chandra AI在教育领域的应用:智能学习助手开发 1. 引言 想象一下这样的场景:一个学生在深夜复习功课,遇到一道数学难题却找不到老师请教;一个上班族想学习新技能,但时间碎片化难以系统学习;一个老师面对几…...

Asian Beauty Z-Image Turbo基础教程:如何修改默认提示词实现‘旗袍少女’‘水墨仕女’风格
Asian Beauty Z-Image Turbo基础教程:如何修改默认提示词实现‘旗袍少女’‘水墨仕女’风格 想用AI画出充满东方韵味的“旗袍少女”或“水墨仕女”,但试了很多模型,出来的效果总是不对味?要么人物五官太西化,要么画面…...

基于Spark+Hadoop+Hive大数据技术的产品评价分析系统设计与实现
前言本研究聚焦于设计与实现一种基于大数据技术的产品评价分析系统,通过构建多层架构体系与融合多元技术方法,为企业决策提供智能化支撑。 研究采用分层架构设计理念,将系统划分为数据采集、存储、处理、分析与展示五大模块。数据采集层综合运…...

7步掌握MetaGPT:从单行需求到完整软件的多智能体革命
7步掌握MetaGPT:从单行需求到完整软件的多智能体革命 【免费下载链接】MetaGPT 🌟 The Multi-Agent Framework: First AI Software Company, Towards Natural Language Programming 项目地址: https://gitcode.com/GitHub_Trending/me/MetaGPT 想…...