光线追踪(纹理映射)

最近在跟着ray trace in one week来学习光线追踪(很多概念茅塞顿开)做到一半想着记录一下(比较随心)上面是之前的效果。ray trace in one week
Texture Coordinates for Spheres(球体纹理坐标)
u, v 纹理坐标指定了2D源图像(或某些2D参数化空间)上的位置。需要一种方式在3d物体上找到u,v坐标。这种映射是完全任意的,但通常你希望覆盖整个表面,并且能够以某种有意义的方式缩放、定位和拉伸2D图像。
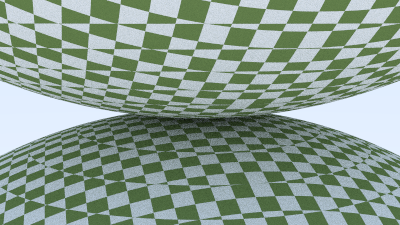
对于球体而言,纹理坐标一般是基于球体的经度和纬度。我们计算球坐标中的 (θ, ϕ),其中 θ 是从底部极点(即从 -Y 方向)向上的角度(0~180度),而 ϕ 是围绕 Y 轴的角度(从 -X 到 +Z 到 +X 到 -Z 再回到 -X)(360度)。希望将 θ 和 ϕ 映射到纹理坐标 u 和 v,每个都在 [0,1] 范围内,其中 (u=0, v=0) 映射到纹理的左下角。因此,从 (θ, ϕ) 到 (u, v) 的归一化将是:
将角度变化映射到对应的x,y,z的坐标上:
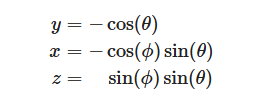
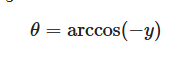
std::atan2(y, x),C++中一种double类型的反正切函数,返回值为弧度,是点(0,0)和(x,y)的连线与X轴正半轴的夹角,其值域为 [-π,π] (当y=0时,可以取到±π),且在第一二象限为正,在第三四象限为负。同理arccos是-y与单位向量1的夹角。
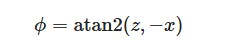
其中的范围为[-π,π] ,此时映射回u为(-1/2~1/2)与实际的u(0~1)不符合,于是将其进行处理,
因为我们有等式:(atan2 函数是 arctan 函数的一种改进,它返回的是给定的 x 和 y 坐标值的反正切值,并且会根据 x 和 y 的符号来确定返回角度的象限。这里加上pai以后回到原来的象限)
![]()
所以:
注意此时的x,y,z的击中点都是单位向量点
static void get_sphere_uv(const Point3& p,double &u , double& v){auto theta = std::acos(-p.y());auto phi = std::atan2(-p.z(),p.x())+pi;u = phi / (2 *pi);v = theta / pi;
}bool hit(const Ray& r,interval ray_t,hit_record& rec) const override{Point3 center = is_moving? sphere_center(r.time()) : center1;vec3 oc=center-r.origin();double a=r.direction().length_squared();double h= dot(r.direction(),oc);double c= oc.length_squared() - radius*radius;double discriminant= h * h - a * c;if(discriminant<0.0) return false;double sqrtd=std::sqrt(discriminant);double root=(h-sqrtd)/a;if(!ray_t.surrounds(root)){root=(h+sqrtd)/a;if(!ray_t.surrounds(root)){return false;}}rec.t=root;rec.p=r.at(root);vec3 outwrad_normal=unit_vector(rec.p-center);rec.set_face_normal(r,outwrad_normal);rec.mat=mat;get_sphere_uv(outwrad_normal,rec.u,rec.v);return true;}从撞击点 P 开始,我们计算出表面坐标 (u, v)。然后我们使用这些坐标来索引我们的程序化实体纹理(例如大理石)。我们也可以读取一个图像,并使用二维 (u, v) 纹理坐标来索引图像。
对于一个(Nx*Ny)的图像,其(i,j)像素对应的纹理坐标为
Accessing Texture Image Data
接下来需要一个方式去读取图像。这里介绍stb_image。它将图像数据读入到一个32位浮点数的数组中。这些数值是打包的 RGB 值,每个分量的值在 [0,1] 的范围内(从黑色到纯白色)。此外,图像以线性颜色空间(gamma = 1)加载——这是我们进行所有计算所使用的颜色空间。
为了帮助我们更轻松地加载图像文件,我们提供了一个辅助类来管理这一切:rtw_image。它提供了一个辅助函数 —— pixel_data(int x, int y) —— 用于获取每个像素的8位RGB字节值。
首先我们需要下载stb_image.h
然后编写封装的类rtw_image
首先我需要一个初始化的定义,让我的程序从定义的目录中去加载图片,并且若加载失败还能输出错误信息。那么首先我需要一个函数去调用stb_image.h
rtw_image(const char* image_filename){// 从指定的文件加载图像数据。如果定义了 RTW_IMAGES 环境变量,// 则只在该目录中查找图像文件。如果找不到图像,// 首先从当前目录开始搜索指定的图像文件,然后在 images/ 子目录中搜索,// 接着是 父目录 的 images/ 子目录,然后是 那个父目录的父目录,依此类推,// 向上搜索六个级别。如果图像没有成功加载,// width() 和 height() 将返回 0。std::string filename = std::string(image_filename);auto imagedir = getenv("RTW_IMAGES");if(imagedir && load(std::string(imagedir) + "/" + filename)) return;if(load(filename)) return;if(load("images/"+filename)) return;if(load("../images/"+filename)) return;if(load("../../images/"+filename)) return;if(load("../../../images/"+filename)) return;if(load("../../../../images/"+filename)) return;if(load("../../../../../images/"+filename)) return;if(load("../../../../../../images/"+filename)) return;std::cerr<<"ERROR: Could not load image file'"<<image_filename<<"'.\n";
}
bool load(const std::string& filename){// 从给定的文件名加载线性(gamma=1)图像数据。// 如果加载成功,返回 true。// 结果数据缓冲区包含第一个像素的三个 [0.0, 1.0] // 范围内的浮点值(首先是红色,然后是绿色,然后是蓝色)。// 像素是连续的,从图像的宽度方向从左到右,接着是下一行,// 直到整个图像的高度。int n = bytes_per_pixel;fdata = stbi_loadf(filename.c_str(),&image_width,&image_height,&n,bytes_per_pixel);if (fdata == nullptr) return false;return true;
}同时由于我们需要根据给定的图像上的像素的x,y的坐标来得到对应的像素的值,其中fdata返回的就是以行为优先级的每一列为bytes_per_pixel的值。于是这里我们需要手动记录每一行的像素值为多少。
bool load(const std::string& filename){// 从给定的文件名加载线性(gamma=1)图像数据。// 如果加载成功,返回 true。// 结果数据缓冲区包含第一个像素的三个 [0.0, 1.0] // 范围内的浮点值(首先是红色,然后是绿色,然后是蓝色)。// 像素是连续的,从图像的宽度方向从左到右,接着是下一行,// 直到整个图像的高度。int n = bytes_per_pixel;fdata = stbi_loadf(filename.c_str(),&image_width,&image_height,&n,bytes_per_pixel);if (fdata == nullptr) return false;bytes_per_scanline = image_width * bytes_per_pixel;convert_to_bytes();return true;
}并且由于值都是[0.0,1.0]的范围,于是需要根据这个值来转换为0~255的范围。
static unsigned char float_to_byte(float value){if (value <= 0.0) return 0;if (value >= 1.0) return 255;return static_cast<unsigned char>(256.0 * value);//这里希望,比如0.99可以转换为255
}
void convert_to_bytes(){// Convert the linear floating point pixel data to bytes, storing the resulting byte// data in the `bdata` member.int total_bytes = image_width * image_height * bytes_per_pixel;bdata = new unsigned char[total_bytes];unsigned char *bptr = bdata;float *fptr = fdata;for (int i=0;i<total_bytes;i++,bptr++,fptr++){*bptr = float_to_byte(*fptr);}
}最后我们需要一个函数可以根据我们提供的图像上的像素坐标得到我们实际需要的颜色值。
const unsigned char* pixel_data(int x,int y) const{static unsigned char magenta[] = {255,0,255};if(bdata == nullptr) return magenta;x = clamp(x,0,image_width);y = clamp(y,0,image_height);return bdata + y * bytes_per_scanline + x * bytes_per_pixel;}static int clamp(int x,int low,int high){if (x<low) return low;if (x<high) return x;return high-1;}rtw_image.h的总代码
#ifndef RTW_STB_IMAGE_H
#define RTW_STB_IMAGE_H
// Disable strict warnings for this header from the Microsoft Visual C++ compiler.
#ifdef _MSC_VER#pragma warning(push,0);
#endif
#define STB_IMAGE_IMPLEMENTATION
#define STBI_FAILURE_USERMSG
#include "extern/stb_image.h"
#include <cstdlib>
#include <iostream>
class rtw_image{
public:rtw_image(){}rtw_image(const char* image_filename){// 从指定的文件加载图像数据。如果定义了 RTW_IMAGES 环境变量,// 则只在该目录中查找图像文件。如果找不到图像,// 首先从当前目录开始搜索指定的图像文件,然后在 images/ 子目录中搜索,// 接着是 父目录 的 images/ 子目录,然后是 那个父目录的父目录,依此类推,// 向上搜索六个级别。如果图像没有成功加载,// width() 和 height() 将返回 0。std::string filename = std::string(image_filename);auto imagedir = getenv("RTW_IMAGES");if(imagedir && load(std::string(imagedir) + "/" + filename)) return;if(load(filename)) return;if(load("images/"+filename)) return;if(load("../images/"+filename)) return;if(load("../../images/"+filename)) return;if(load("../../../images/"+filename)) return;if(load("../../../../images/"+filename)) return;if(load("../../../../../images/"+filename)) return;if(load("../../../../../../images/"+filename)) return;std::cerr<<"ERROR: Could not load image file'"<<image_filename<<"'.\n";}bool load(const std::string& filename){// 从给定的文件名加载线性(gamma=1)图像数据。// 如果加载成功,返回 true。// 结果数据缓冲区包含第一个像素的三个 [0.0, 1.0] // 范围内的浮点值(首先是红色,然后是绿色,然后是蓝色)。// 像素是连续的,从图像的宽度方向从左到右,接着是下一行,// 直到整个图像的高度。int n = bytes_per_pixel;fdata = stbi_loadf(filename.c_str(),&image_width,&image_height,&n,bytes_per_pixel);if (fdata == nullptr) return false;bytes_per_scanline = image_width * bytes_per_pixel;convert_to_bytes();return true;}int width() const {return (fdata == nullptr) ? 0 : image_width;}int height() const {return (fdata == nullptr) ? 0 : image_height;}const unsigned char* pixel_data(int x,int y) const{static unsigned char magenta[] = {255,0,255};if(bdata == nullptr) return magenta;x = clamp(x,0,image_width);y = clamp(y,0,image_height);return bdata + y * bytes_per_scanline + x * bytes_per_pixel;}
private:const int bytes_per_pixel = 3;float *fdata = nullptr; // Linear floating point pixel data 每个像素的0~1的值unsigned char *bdata = nullptr; Linear 8-bit pixel data 转换为8bit的颜色值int image_width = 0;int image_height = 0;int bytes_per_scanline = 0;static int clamp(int x,int low,int high){if (x<low) return low;if (x<high) return x;return high-1;}static unsigned char float_to_byte(float value){if (value <= 0.0) return 0;if (value >= 1.0) return 255;return static_cast<unsigned char>(256.0 * value);//这里希望,比如0.99可以转换为255}void convert_to_bytes(){// Convert the linear floating point pixel data to bytes, storing the resulting byte// data in the `bdata` member.int total_bytes = image_width * image_height * bytes_per_pixel;bdata = new unsigned char[total_bytes];unsigned char *bptr = bdata;float *fptr = fdata;for (int i=0;i<total_bytes;i++,bptr++,fptr++){*bptr = float_to_byte(*fptr);}}
};
// Restore MSVC compiler warnings
#ifdef _MSC_VER#pragma warning (pop)
#endif#endif应用
首先需要修改texture.h的代码,之前的纹理都是固定颜色的,现在的纹理使用的是图片的纹理颜色。
class image_texture : public texture{
public:image_texture(const char* image_filename) : image(image_filename){}color value(double u,double v,const Point3& p) const override{// If we have no texture data, then return solid cyan as a debugging aid.if(image.height() <= 0) return color(0,1,1);// Clamp input texture coordinates to [0,1] x [1,0]u = interval(0,1).clamp(u);v = 1.0 - interval(0,1).clamp(v);// Flip V to image coordinatesint i = int(u*image.width());int j = int(v*image.height());auto pixel = image.pixel_data(i,j);double color_scale = 1.0 / 255.0;return color(color_scale*pixel[0],color_scale*pixel[1],color_scale*pixel[2]);}
private:rtw_image image;
};做一个地球
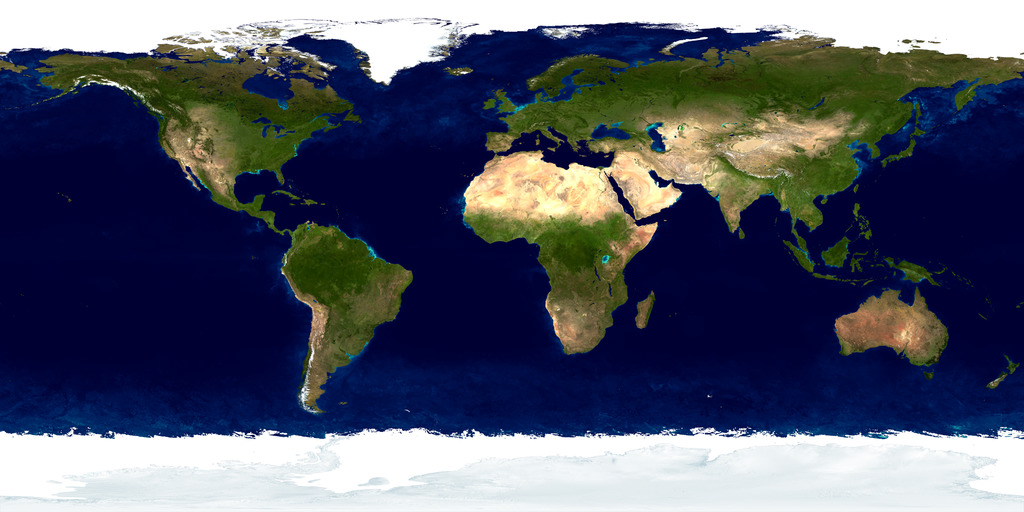
void earth(){hittable_list world;shared_ptr<image_texture> earth_texture = make_shared<image_texture>("../images/earthmap.jpg");shared_ptr<lambertian> earth_surface = make_shared<lambertian>(earth_texture);shared_ptr<sphere> globe = make_shared<sphere>(Point3(0,0,0),2,earth_surface);world.add(globe);camera cam;cam.aspect_ratio = 16.0 / 9.0;cam.image_width = 400;cam.samples_per_pixel = 100;cam.max_depth = 50;cam.vfov = 20;cam.lookfrom = Point3(0,0,12);cam.lookat = Point3(0,0,0);cam.vup = vec3(0,1,0);cam.defocus_angle = 0;cam.render(world);
}
int main(){earth();return 0;
}
相关文章:
光线追踪(纹理映射)
最近在跟着ray trace in one week来学习光线追踪(很多概念茅塞顿开)做到一半想着记录一下(比较随心)上面是之前的效果。ray trace in one week Texture Coordinates for Spheres(球体纹理坐标) u, v 纹理…...

传统产品经理VS现在AI产品经理,你要学习的太多了,超详细收藏我这一篇就够了
传统产品经理想要转行成为AI产品经理,需要经历一系列的学习和实践过程。下面是一份详细的学习路线图,旨在帮助你顺利转型。 学习路线图 了解AI基础知识 AI概览:阅读《人工智能:一种现代的方法》这样的书籍,以获得对AI…...
C#使用Socket实现TCP服务器端
1、TCP服务器实现代码 using System; using System.Collections.Generic; using System.Linq; using System.Net; using System.Net.Sockets; using System.Text; using System.Threading; using System.Threading.Tasks;namespace PtLib.TcpServer {public delegate void Tcp…...
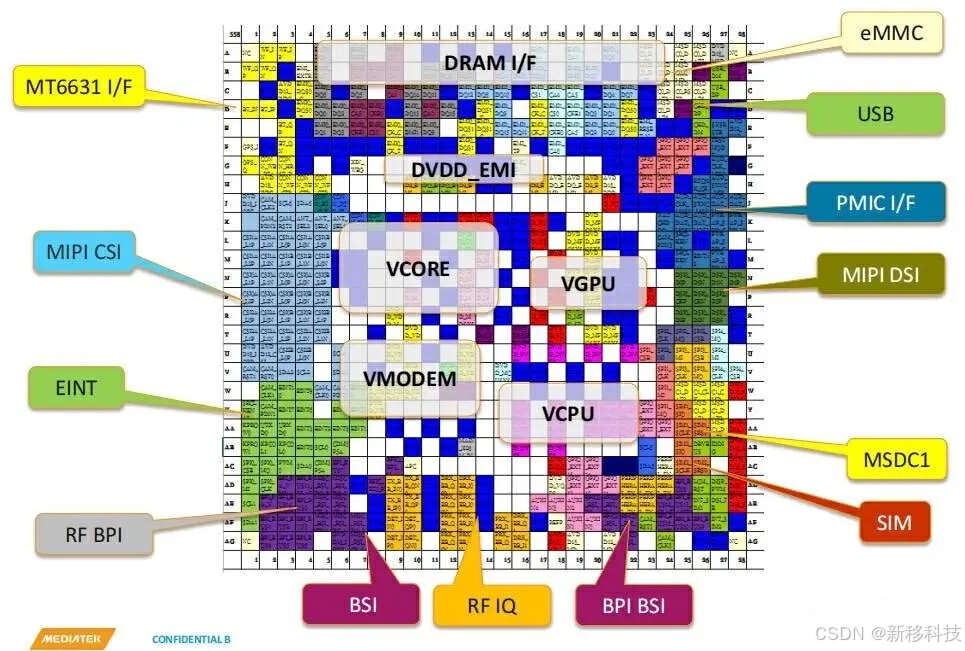
MTK联发科MT8766/MT8166安卓核心板性能参数对
MT8766核心板 采用联发科四核2G主频芯片方案,国内4G全网通。12nm先进工艺,支持 Android9.0系统。 GPU 采用超强 IMG GE8300 ,主频600MHz。支持高速LPDDR4/X,主频高达1600MHz。支持EMMC5.1。标配 WIFI 802.11 ac/abgn,BT 5.0。 支持…...
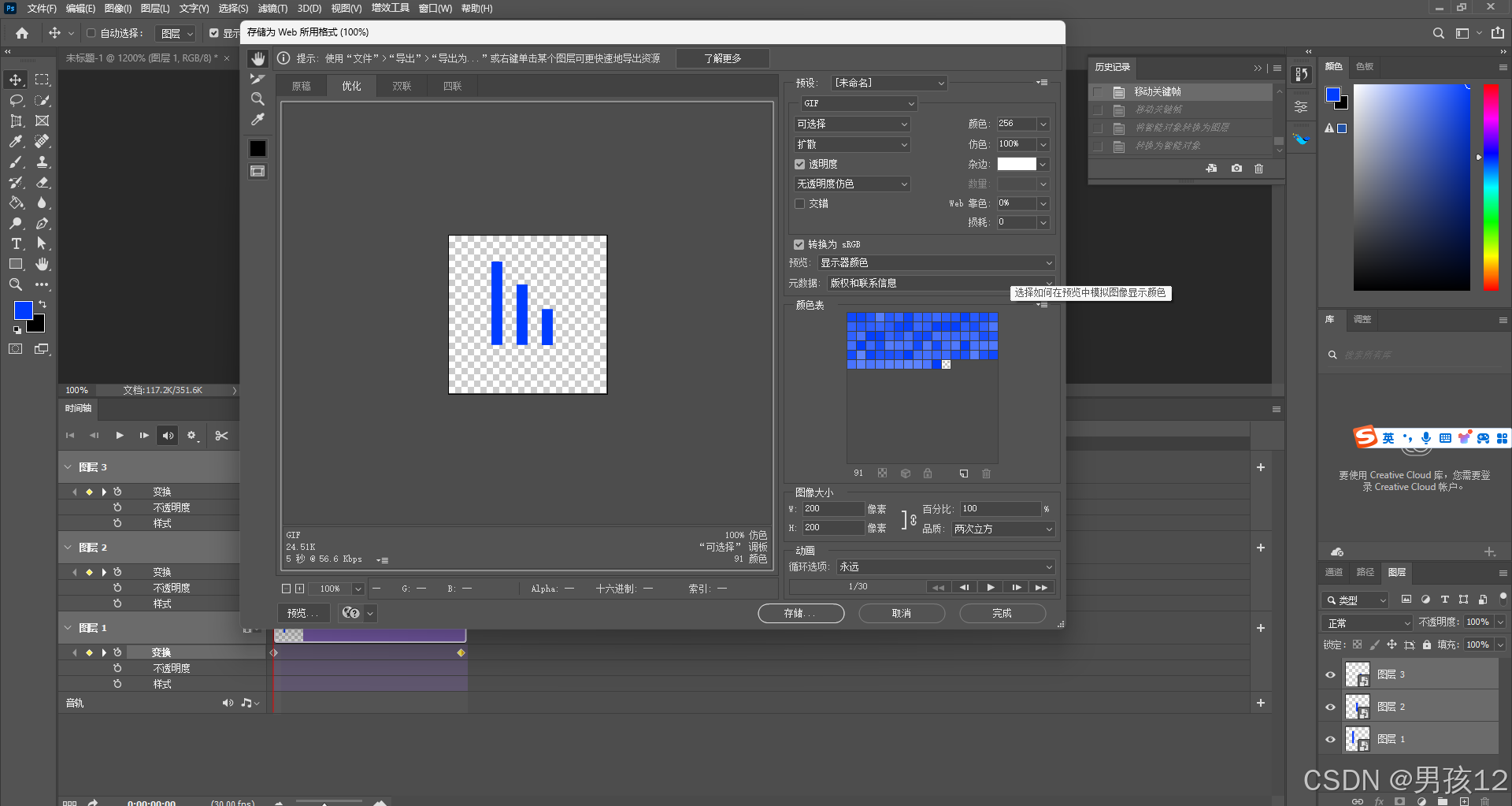
ps绘制动图
ps绘制动图教程(简易版)-直播gif动态效果图 第一步 打开ps绘制几个简单的长方形 第二步 将图层转化为智能图层 第三部 在窗口找到时间轴创建时间轴 第五步 通过变换来鼠标控制图像的变化并打下结束点 第六部 通过图像中的图像大小控制gif的大小 第七部 …...

AI学习指南机器学习篇-强化学习和深度学习简介
AI学习指南机器学习篇-强化学习和深度学习简介 强化学习和深度学习基本概念回顾 强化学习是一种机器学习方法,其目标是让智能体通过与环境的交互来学习最优的行为策略。在强化学习中,智能体不需要标记的训练数据,而是通过试错来提升自己的表…...

yolov8 bytetrack onnx模型推理
原文:yolov8 bytetrack onnx模型推理 - 知乎 (zhihu.com) 一、pt模型转onnx from ultralytics import YOLO# Load a model model YOLO(weights/yolov8s.pt) # load an official model # model YOLO(path/to/best.pt) # load a custom trained# Export the mod…...
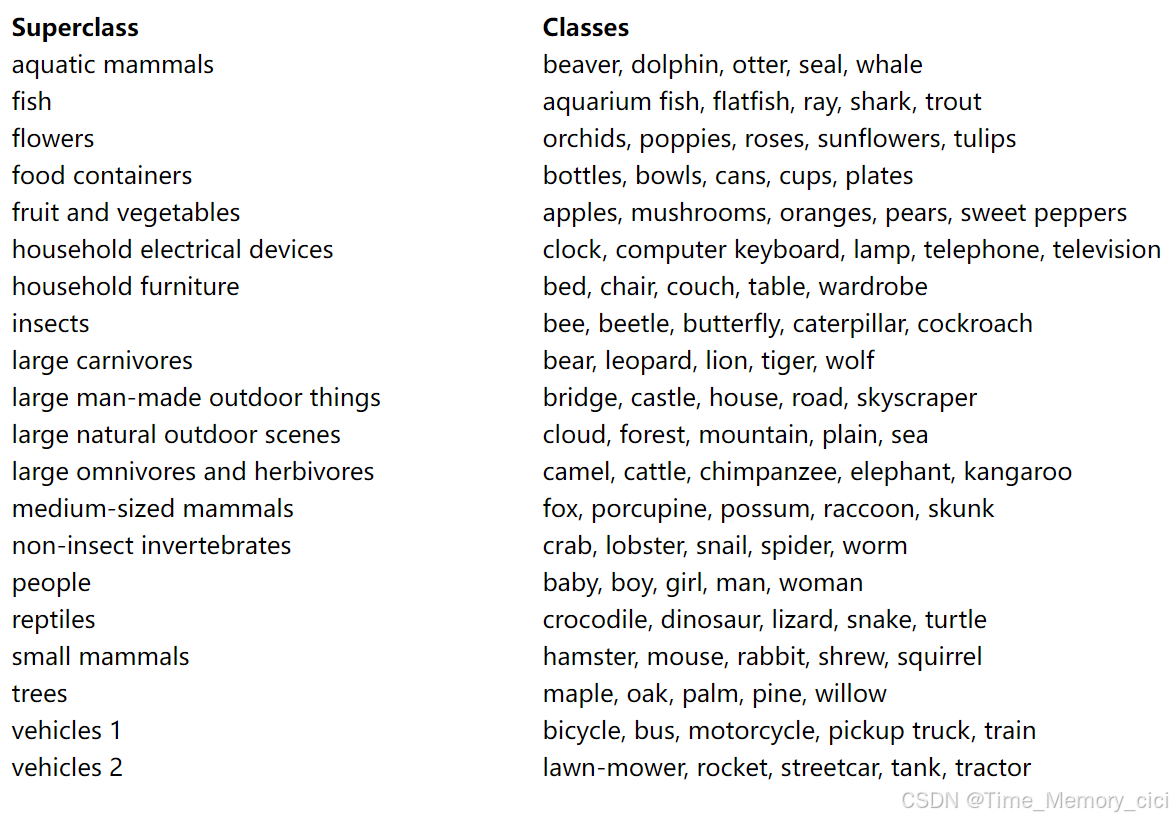
ImageNet数据集和CIFAR-10数据集
一、为什么需要大量数据集 人工智能其实就是大数据的时代,无论是目标检测、图像分类、还是现在植入我们生活的推荐系统,“喂入”神经网络的数据越多,则识别效果越好、分类越准确。因此开源大型数据集的研究团队为人工智能的发展做了大量贡献…...
Go语言编程大全,web微服务数据库十大专题精讲
本课程主要从数据结构、Go Module 依赖管理、IO编程、数据库编程、消息队列、加密技术与网络安全、爬虫与反爬虫、web开发、微服务通用技术、Kitex框架等方面讲解~ 链接:https://pan.quark.cn/s/d65337a0e60d...
【LabVIEW学习篇 - 13】:队列
文章目录 队列 队列 队列通常情况下是一种先入先出(FIFO:First in First out)的数据结构,常用作数据缓存,通过队列结构可以保证数据有序的传递,避免竞争和冲突。 案例:利用队列,模…...

大语言模型综述泛读之Large Language Models: A Survey
摘要 这篇文章主要回顾了一些最突出的LLMs(GPT, LLaMA, PaLM)并讨论了它们的特点、贡献和局限性,就如何构建增强LLMs做了一个技术概述,然后调研了为LLM训练、微调和评估而准备的N多种流行数据集,审查了使用的LLM评价指标,在一组有代表性的基准上比较了几个流行的LLMs;最…...
奇偶函数的性质及运算
目录 定义 注意 特征 运算 拓展 定义 设函数f(x)的定义域D; 如果对于函数定义域D内的任意一个x,都有f(-x)-f(x),那么函数f(x)就叫做奇函数。如果对于函数定义域D内的任意一个x…...
代码随想录 day 32 动态规划
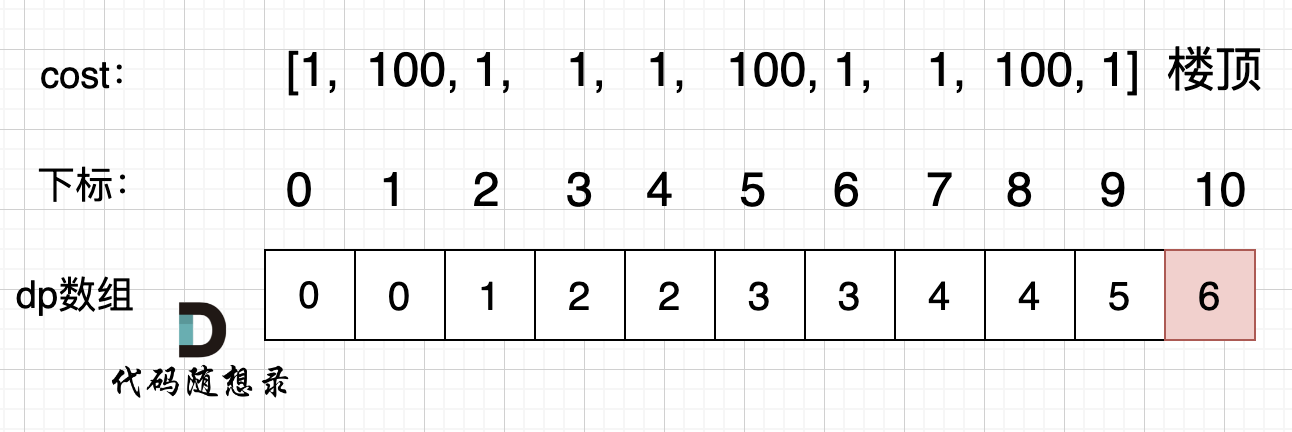
第九章 动态规划part01 今天正式开始动态规划! 理论基础 无论大家之前对动态规划学到什么程度,一定要先看 我讲的 动态规划理论基础。 如果没做过动态规划的题目,看我讲的理论基础,会有感觉 是不是简单题想复杂了? …...

支持目标检测的框架有哪些
目标检测是计算机视觉领域的一个重要任务,许多深度学习框架都提供了对目标检测的支持。以下是一些广泛使用的支持目标检测的深度学习框架: 1. TensorFlow TensorFlow 是一个广泛使用的开源深度学习框架,由Google开发。它提供了TensorFlow O…...

原神自定义倒计时
<!DOCTYPE html> <html lang"zh-CN"><head><meta charset"UTF-8"><title>原神倒计时</title><style>* {margin: 0;padding: 0;box-sizing: border-box;user-select: none;body {background: #0b1b2c;}}header {…...

top命令实时监测Linux进程
top命令可以动态实时显示Linux进程信息,方便观察频繁换进换出的内存的进程变化。 top命令执行示例如下: 其中,第一行表示系统当前时间、系统的运行时间、登录的用户数目、系统的平均负载(最近1分钟,最近5分钟ÿ…...

Rust 所有权
所有权 Rust的核心特性就是所有权所有程序在运行时都必须管理他们使用计算机内存的方式 有些语言有垃圾收集机制,在程序运行时,他们会不断地寻找不再使用的内存在其他语言中,程序员必须显式的分配和释放内存 Rust采用了第三种方式࿱…...

Python面试题:结合Python技术,如何使用PyTorch进行动态计算图构建
PyTorch 是一个流行的深度学习框架,它通过动态计算图(Dynamic Computation Graphs)来支持自动微分(Autograd)。动态计算图的特点是每次前向传播时都会构建新的计算图,这使得它非常灵活,适合处理…...

基于RHEL7的服务器批量安装
目录 一、项目要求 二、实验环境 三、生成kickstart自动化安装脚本 四、搭建dhcp服务并测试kickstart脚本 五、搭建pxe网络安装环境实现服务器自动部署 编辑 六、测试 一、项目要求 1.使用kickstart编写自动化安装脚本 2.搭建dhcp服务并测试kickstart脚本 3.搭建px…...

C. Light Switches
文章目录 C. Light Switches题意:解题思路:解题代码: C. Light Switches 原题链接 题意: 房间的灯最初均为关闭状态,安装芯片后,它会每隔k分钟改变一次房间的灯光状态,即会打开灯光k分钟&…...

IPD的势、道、法、术、器
目录 简介 一、势:为什么 IPD 是必然选择? 二、道:IPD 的底层哲学 三、法与术:从战略到执行的具体路径 四、器:让流程真正落地的工具与组织 不是每家公司都需要全套 IPD,但每家公司都需要 IPD 思维 简…...

别再死记硬背Payload了!我用XSS-Game靶场,带你拆解18种过滤规则背后的绕过逻辑
从XSS-Game靶场实战中掌握18种过滤规则的逆向思维在网络安全领域,跨站脚本攻击(XSS)始终是Web应用面临的主要威胁之一。许多开发者虽然了解XSS的基本概念,但当面对各种复杂的过滤规则时,往往不知如何系统分析并构造有效…...

【UniApp小程序开发】解决无法使用Vue自定义指令的完美替代方案:权限组件封装
在 UniApp 开发中,你是否遇到过这样的困惑:明明在 Vue Web 项目中用得顺手的 v-permission 自定义指令,一到小程序端就完全失效?本文将深入剖析其原因,并提供一套可直接复用的组件化解决方案,让你在小程序中…...

【MySQL数据库 | 第一篇】 概述
数据库相关概念: 数据库(Database):数据库是指一组有组织的数据的集合,通过计算机程序进行管理和访问。数据库管理系统:操纵和管理数据库的大型软件SQL:操作关系型数据库的编程语言,定义了一套操作关系型数…...

论文写作效率翻倍?okbiye 毕业论文 AI 功能全解析:从需求到终稿的规范路径
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPT毕业论文 - Okbiye智能写作https://www.okbiye.com/ai/bylw 一、从界面看本质:okbiye 毕业论文 AI 写作的设计逻辑 打开 okbiye 的毕业论文 AI 写作页面,首先能感受到的是清晰的…...

flameshow性能优化技巧:如何快速定位Go程序中的CPU热点
flameshow性能优化技巧:如何快速定位Go程序中的CPU热点 【免费下载链接】flameshow A terminal Flamegraph viewer. 项目地址: https://gitcode.com/gh_mirrors/fl/flameshow 🔥 想要快速定位Go程序中的性能瓶颈吗?flameshow是一个强大…...

对比自行维护多个 API 源,使用 Taotoken 聚合服务在运维复杂度上的降低
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比自行维护多个 API 源,使用 Taotoken 聚合服务在运维复杂度上的降低 在构建依赖多个大语言模型的应用时,…...

国内大学生常用的AI写作辅助平台有哪些?
国内高校学生常用的 AI 写作辅助平台,以本土化全流程工具为主,结合通用大模型与专项功能模块,覆盖选题构思、大纲搭建、初稿撰写、语言润色、降重处理、查重检测及格式排版等关键环节,以下是主流平台详解与对比: 一、本…...

输电线路在线监测系统|架空线路安全运行的“第一道防线“!
输电线路微气象监测站是专为高压输电线路、电网廊道、杆塔运维量身打造的专利级一体化微气象智能监测设备。依托双专利超声波探测技术、六要素集成传感架构、无启动风速高精测量、智能抗干扰稳控系统,实现输电线路沿线气象24小时全自动捕捉、动态实时监测、大风风险…...

ModernWMS核心功能详解:从ASN入库到Dispatch出库的完整工作流
ModernWMS核心功能详解:从ASN入库到Dispatch出库的完整工作流 【免费下载链接】ModernWMS The open source simple and complete warehouse management system is derived from our many years of experience in implementing erp projects. We stripped the origin…...