简单的docker学习 第4章 docker容器
第4章 Docker容器
4.1 容器基础
4.1.1 容器启动流程
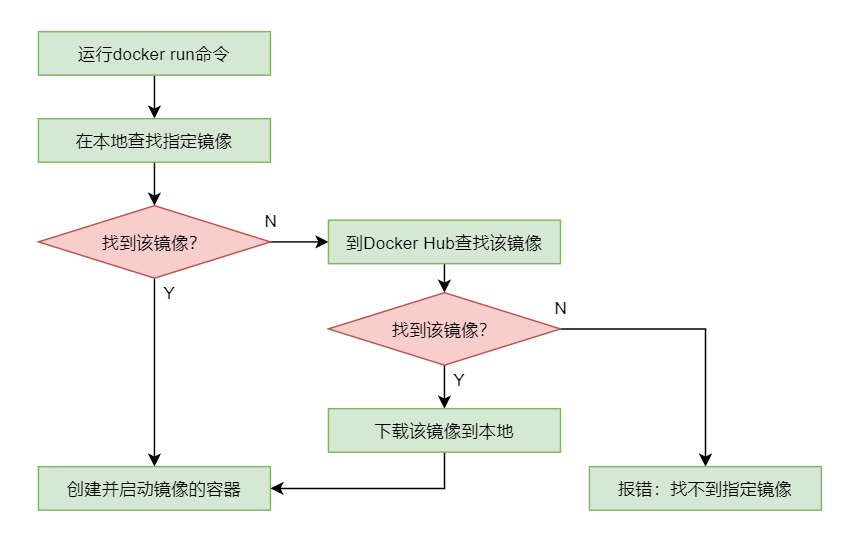
通过 docker run 命令可以启动运行一个容器。该命令在执行时首先会在本地查找指定的镜像,如果找到了,则直接启动,否则会到镜像中心查找。如果镜像中心存在该镜像,则会下载到本地并启动,如果镜像中心也没有,则直接报错。
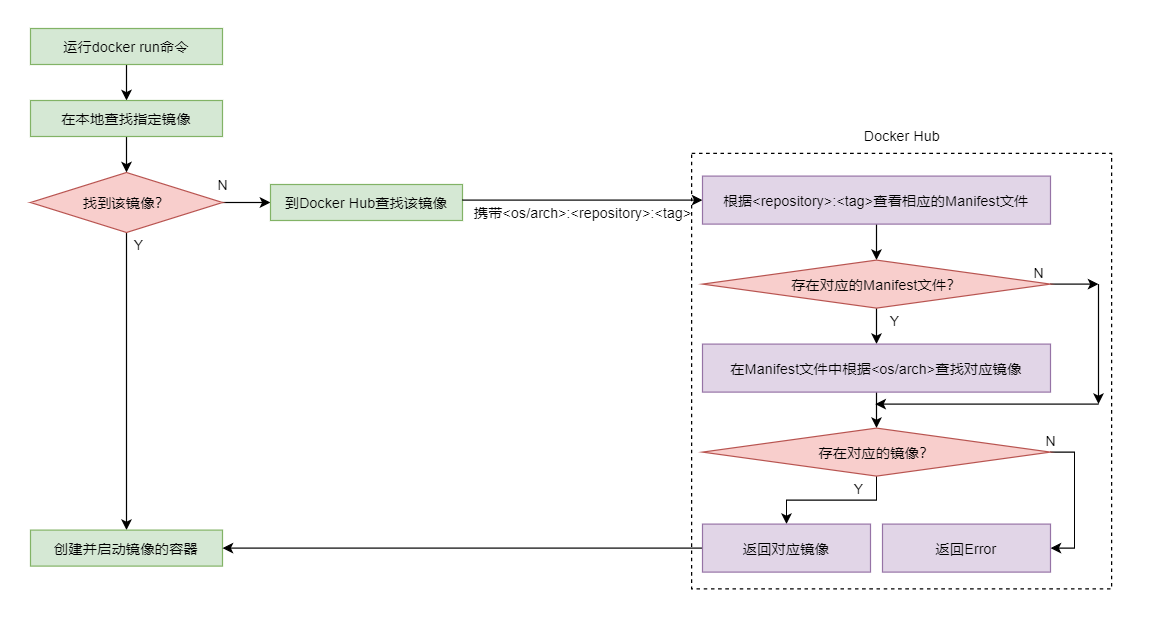
如果再与多架构镜像原理相整合,则就形成了完整的容器启动流程。
4.1.2 容器运行本质
Docker 容器存在的意义就是为了运行容器中的应用,对外提供服务,所以启动容器的目的就是启动运行该容器中的应用。容器中的应用运行完毕后,容器就会自动终止。所以,如果不想让容器启动后立即终止运行,则就需要使容器应用不能立即结束。通常采用的方式有两种,使应用处于与用户交互的状态或等待状态。
4.2 容器创建并启动命令
对于容器的运行,有两种运行模式:交互模式与分离模式。下面通过运行 ubuntu 与tomcat 来演示这两种运行模式的不同。
4.2.1 以交互模式运行 ubuntu
首先下载ubantu,然后再进行启动
docker pull ubantu
docker run --name myubuntu -i -t ubuntu /bin/bash
命令解析
- name 自定义容器名称
- -i -t / -it 两个参数分别指定以交互模式运行容器,并且为容器分配一个伪终端
- 后面的/bin/bash 用于指定容器启动后需要运行的命令为/bin 下的 bash 命令,而该命令会启动一个 bash 终端
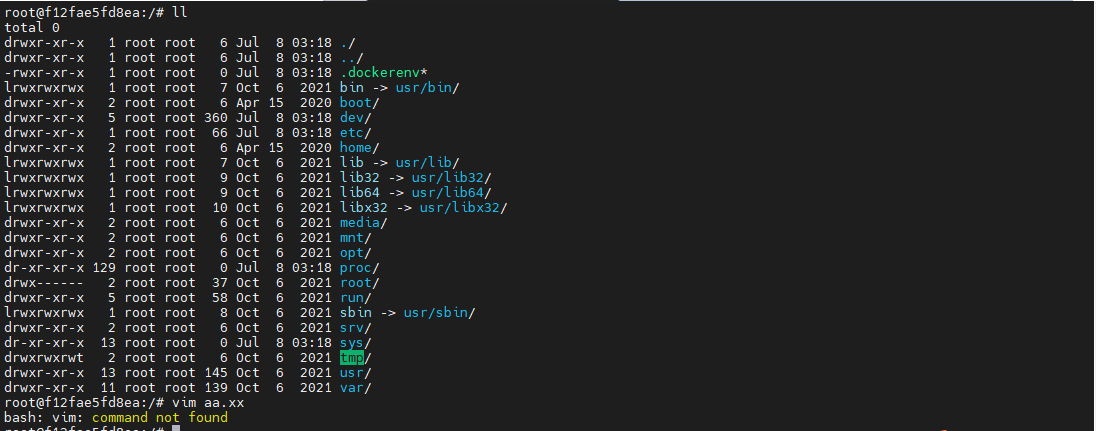
我们在这里运行了一个 ubuntu 系统的容器,并为其取名为 myubuntu。另外我们可以注意到,命令行前面提示部分内容发生了变化:原来显示的是[root@docker ~],而现在变为了root@f12fae5fd8ea:/#,这个就是 docker 生成的伪客户端,而数字 f12fae5fd8ea 表示的是docker 容器的 ID。
此时就可以通过 Linux 命令对该 ubuntu 系统进行操作了。不过,由于容器中的该系统是一个精简的系统,有很多常用命令是没有安装的,所以如果要使用这些命令,就需要安装。
使用exit退出,退出后容器则也进行退出,容器本质为处理用户交互的状态或等待状态

4.2.2 以交互模式运行 tomcat
我们现在使用的都是8.5.49之前的版本,包含8.5.49,之后的版本webapps内容修改到其他目录(webapps.dist),需要修改回webapp才能正常访问
docker run --name mytomcat8 -it tomcat:8.5.32 /bin/bash
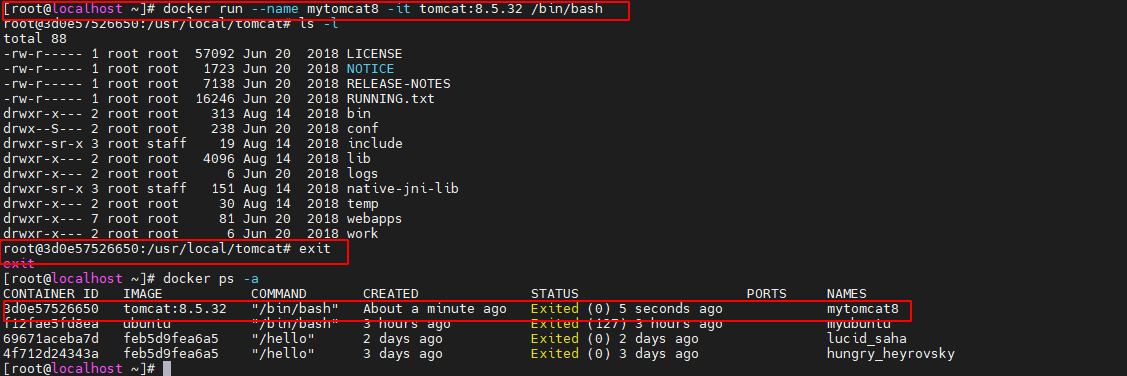
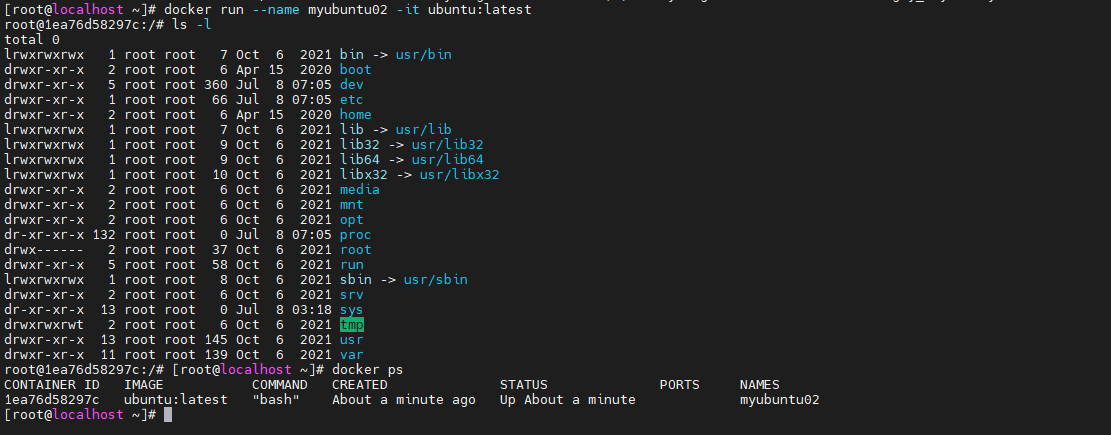
通过 ls –l 命令可查看 tomcat 根目录下的文件。注意,不支持 ll 命令,查看运行容器,发现没有tomcat,这是因为bin/bash不会启动tomcat
下面也是以交互模式运行 tomcat 容器,不同的是,该命令后没有/bin/bash,此时会真正启动 tomcat。
docker run --name tomcat8081 -it -p 8081:8080 tomcat:8.5.32
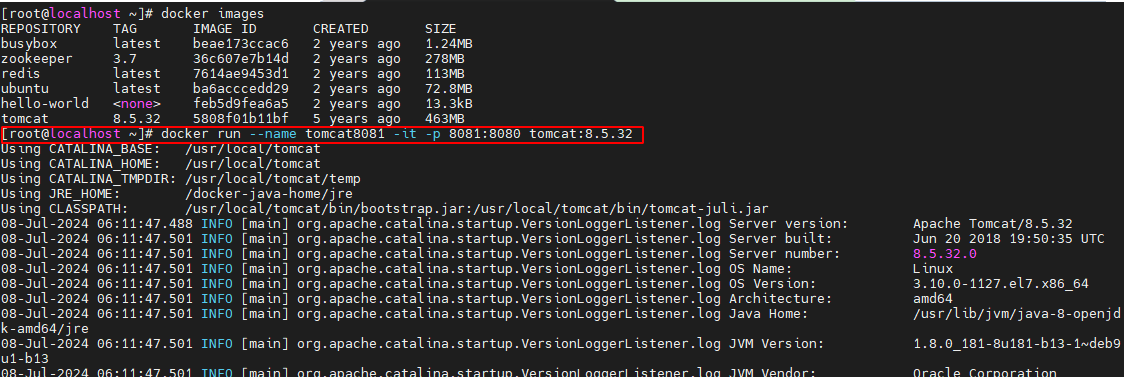
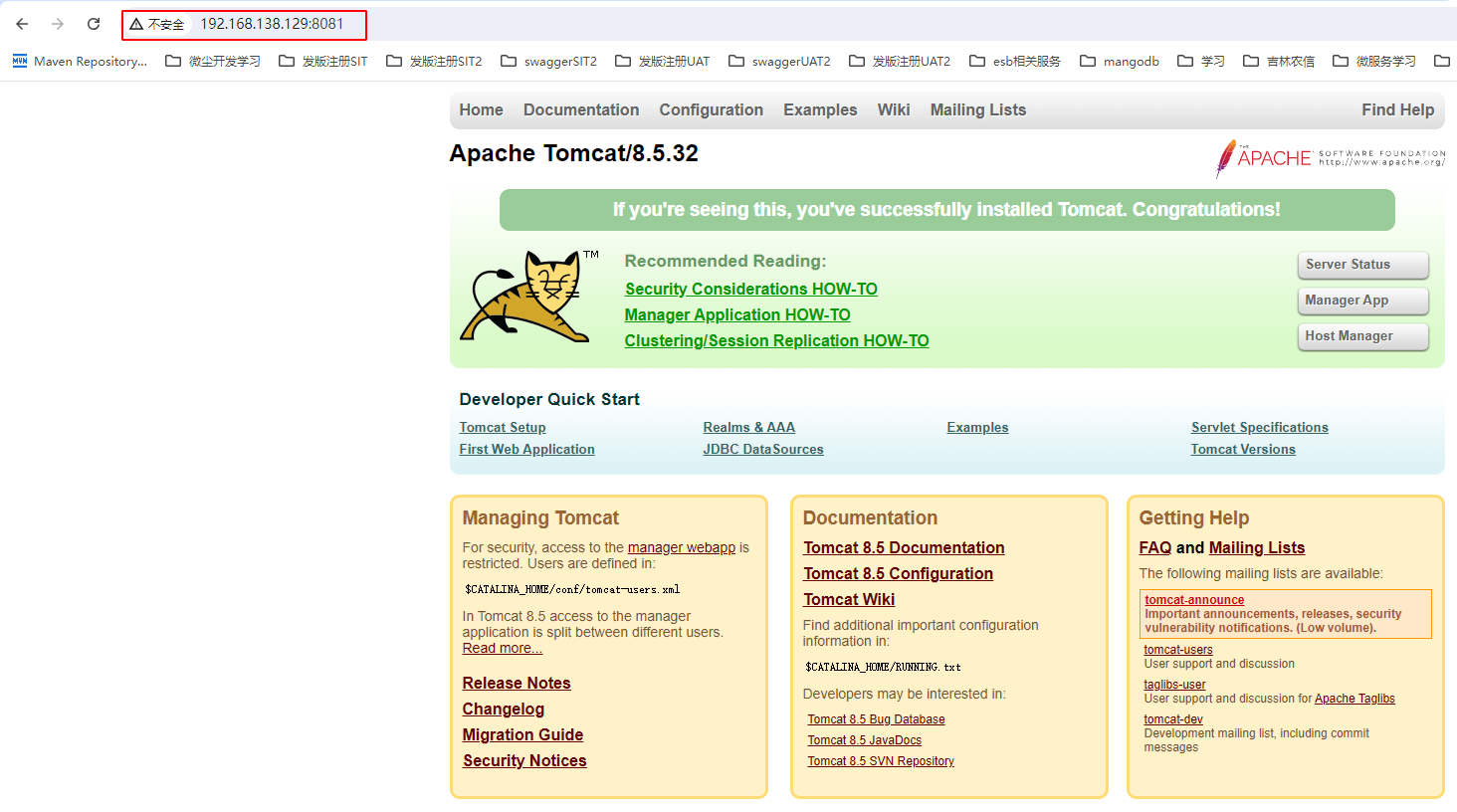
通过路径访问 192.168.138.129:8081,-p 代表端口映射,其中8081是宿主机端口,8080是容器内tomcat启动端口,且 tomcat 的日志输出占居了命令行。
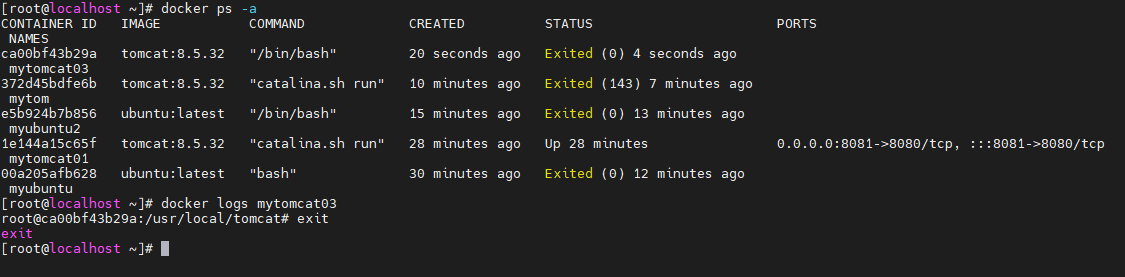
4.2.3 以分离模式运行 tomcat
下面是以分离模式运行的 tomcat,返回的是容器 ID,其中-d 选项表示以分离模式(detached mode)运行容器,即命令在后台运行,命令的运行与宿主机的运行分离开来。
docker run --name mytomcat03 -d -p 8083:8080 tomcat:8.5.32
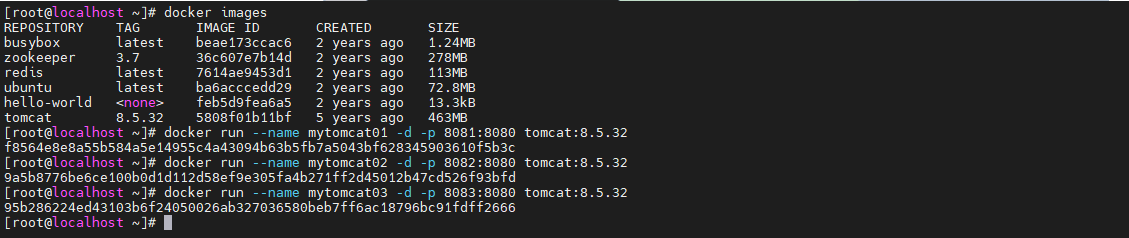
使用docker ps 进行查看,发现三个服务都还在与运行状态
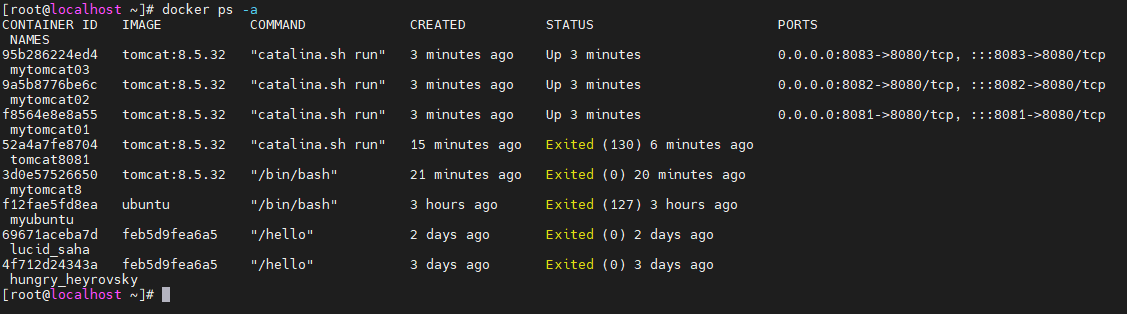
可以看到,已经启动了三个 tomcat 容器。且无论是 IPv4 还是 IPv6,端口映射关系都很明确。此时通过 window 系统中的浏览器访问 docker 主机中映射的三个 tomcat 端口号就可以访问到 tomcat。
通过该访问可以知道为什么要做端口映射的原因了:为了使相同的客户端主机可以访问同一宿主机上相同端口号的不同容器
如果使用大写的 -P,则是使用系统自动分配的端口号映射到容器内的自定义端口
docker run --name mytomcat03 -d -P tomcat:8.5.32
4.2.4 以分离模式运行 **ubuntu **-d
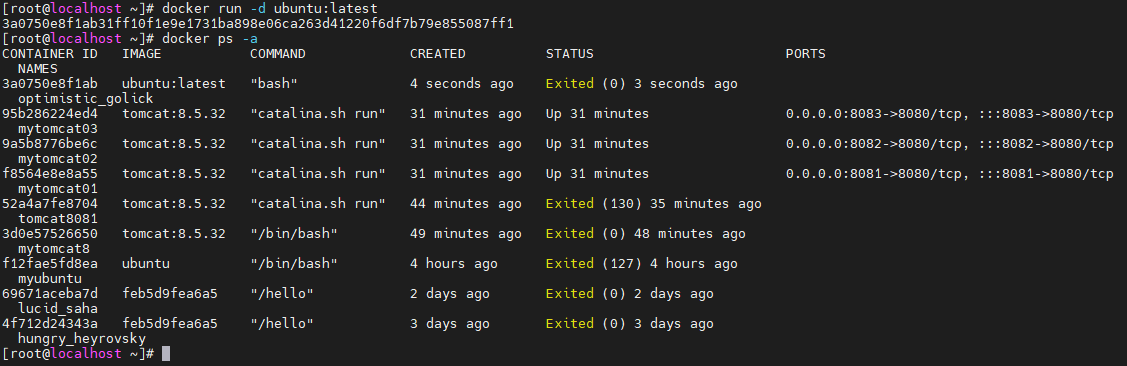
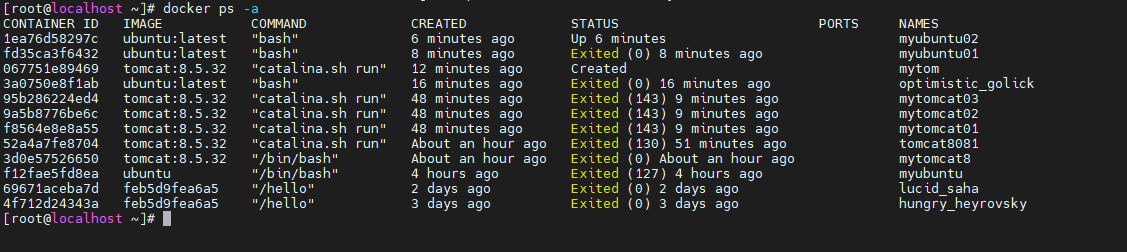
该运行方式存在一个问题:容器使用命令启动了,但通过 docker ps 命令查看不到。再通过 docker ps –a 命令可以发现该容器,只不过其已经退出。docker ps 查看的就是 up状态的容器,由于其已经退出,所以 docker ps 查看不到。
docker run -d ubuntu:latest
4.3 容器创建命令 create
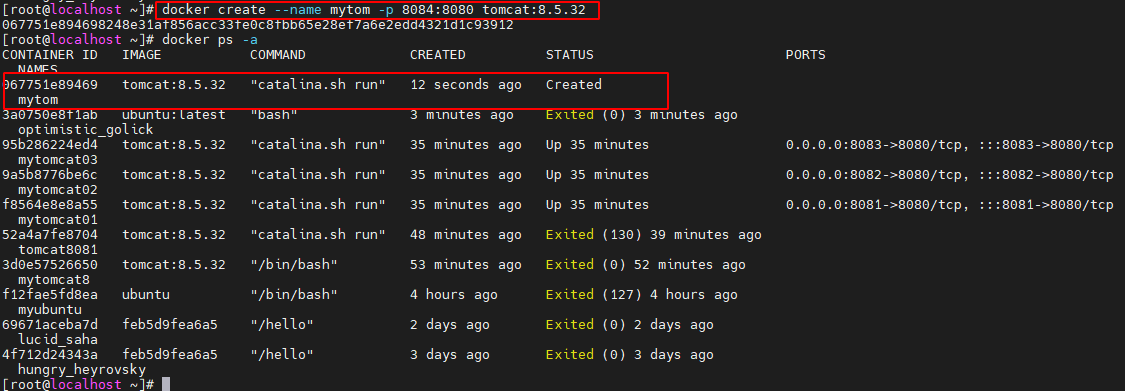
docker create 命令仅创建容器但不启动,其用法与 docker run 非常相似。注意,其没有-d 选项。
docker create --name mytom -p 8084:8080 tomcat:8.5.32
4.4 容器退出命令
退出容器指的是退出以交互模式运行的容器。分为两种退出方式:
4.4.1 退出并停止容器 exit
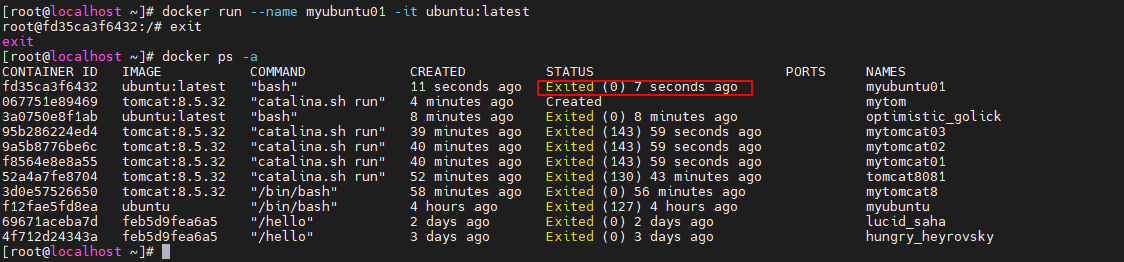
docker run --name myubuntu01 -it ubuntu:latest
在容器命令行中再运行 exit 命令后,通过 docker ps –a 可以查看到该容器已经退出了。
4.4.2 退出不停止容器 Ctrl + P + Q
使用快捷键 Ctrl + P + Q 能够返回到了宿主机命令行。再通过 docker ps 可以查看到其是 UP 状态,说明容器退出了但并没有停止。
注:先按下 Ctrl + P,然后再按下 Q。
4.5 容器状态查看命令
4.5.1 查看所有正在运行的容器
docker ps 命令本身查看的是所有处于运行状态的容器信息。

4.5.2 查看所有容器 ps -a
docker ps –a 用于查看所有容器,无论是否处于运行状态
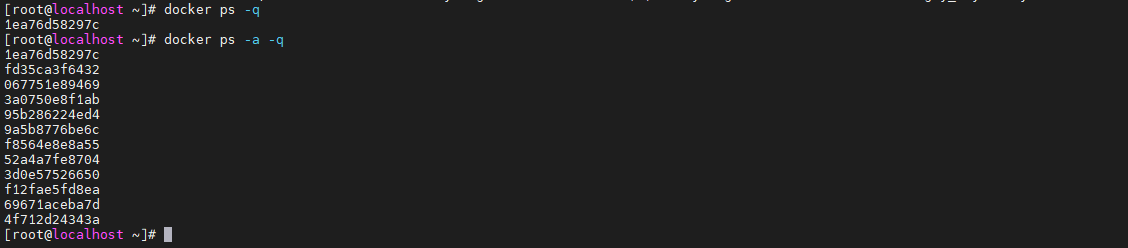
4.5.3 查看所有容器的 ID -q
docker ps -q
docker ps -a -q
4.5.4 查看最后创建的容器
docker ps –l 用于查看最后创建的容器,无论该容器是否处于运行状态。
docker ps -l

4.5.5 查看最后创建的 n 个容器
docker ps –n 3 用于查看最后创建的指定个数的容器,无论该容器是否处于运行状态。
docker ps -n 1

4.6 容器再进命令
当我们以分离模式运行了一个容器,或以交互模式运行了一个容器,但容器内部执行的命令占用了交互命令行,而此时我们又想进入到容器中对容器内部进行一些操作,此时就需要用到 exec/attach 命令了。
注意,它们只能对正在运行的容器进行操作
4.6.1 新建进程进入容器 exec
该命令也用于进入到了运行状态的容器中。对于该命令的测试,首先以分离模式运行 tomcat8 容器。此时想进入该 mytomcat 容器,就可以使用 exec 命令。
docker exec -i -t mytomcat01 /bin/bash
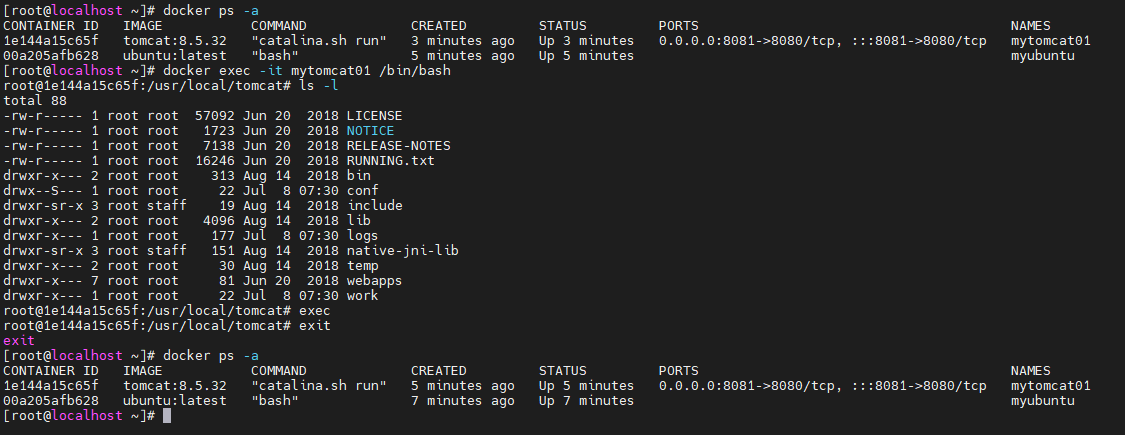
此时查看正在运行的容器,发现 mytomcat 容器并未退出。说明 exec 命令会创建一个新的独立于容器的进程,而 exit 命令仅用于结束该新建进程。同样,以交互模式运行 tomcat 容器,仍是无法使用命令行的,因为 tomcat 日志输出占用了命令行
4.6.2 外部操作容器 exec
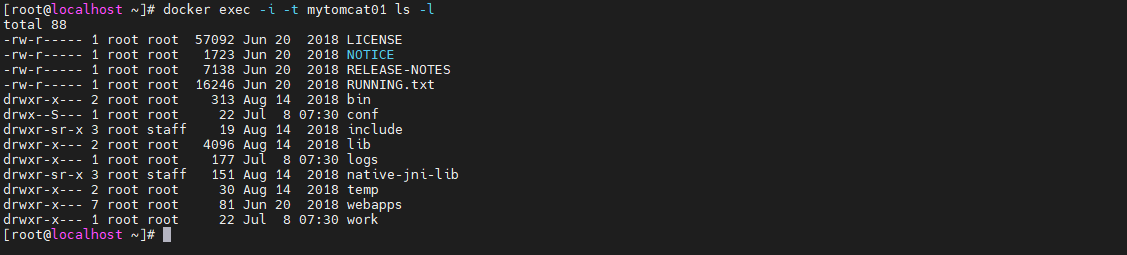
前两种都是在进入到容器后才对容器进行操作的,我们也可以不进入容器直接对容器内部进行操作。例如仅想查看 tomcat 容器中工作目录中所包含的文件,直接在 exec 命令后紧跟要执行的命令即可直接看到其结果
docker exec -i -t mytomcat01 ls -l
4.6.3 容器附加标准输入
对于该命令的测试,首先以交互方式运行一个 ubuntu 容器,然后使用 Ctrl + P + Q 命令退出但不停止容器。

然后使用 attach 命令进入容器命令行。此时,再使用 exit 命令退出容器。然后会发现容器也停止了。由于 exit 命令的作用是,结束当前进程,所以说明 **attach **命令并没有另外再创建新的进程,而是使用了容器进程,exit 命令退出了当前进程,也就退出了容器

4.6.4 容器附加标准输出
启动一个 tomcat 容器与其中的 tomcat,指定容器名称为 mytom。然后通过 docker attach命令则可看到如下场景:占用了命令行,且没有任何输出,即使通过浏览器访问该 tomcat也没有任何输出。此时的 mytom 容器已经附加了标准输出,只不过,其输出的是 tomcat 的启停日志信息。

通过 Ctrl + C 可结束 tomcat,此时可看到停止日志显示了出来。但由于此时的 tomcat已经停止,tomcat 容器已经退出,所以该 docker attach 命令也就随之结束了。

4.7 容器内进程查看命令 top
docker top 命令用于查看指定的正在运行的容器中正在运行的进程详情,这个详情包括当前这个进程正在运行的命令。当然,如果容器中运行的进程较多,也可以通过 grep 对结果进行过滤。
docker top mytomcat01
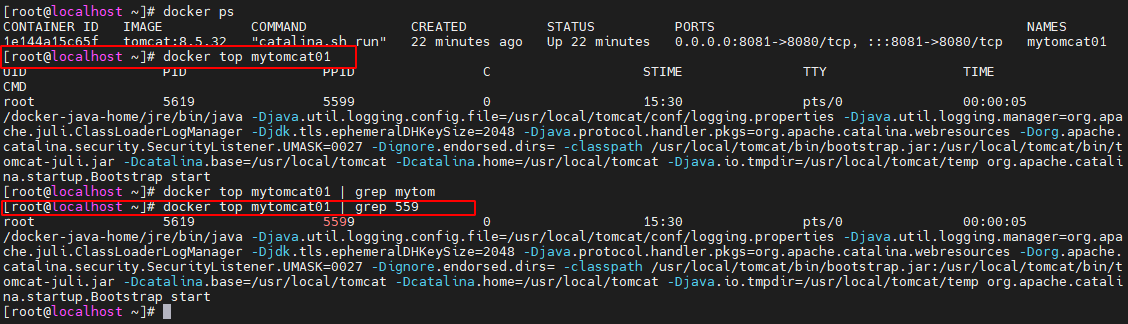
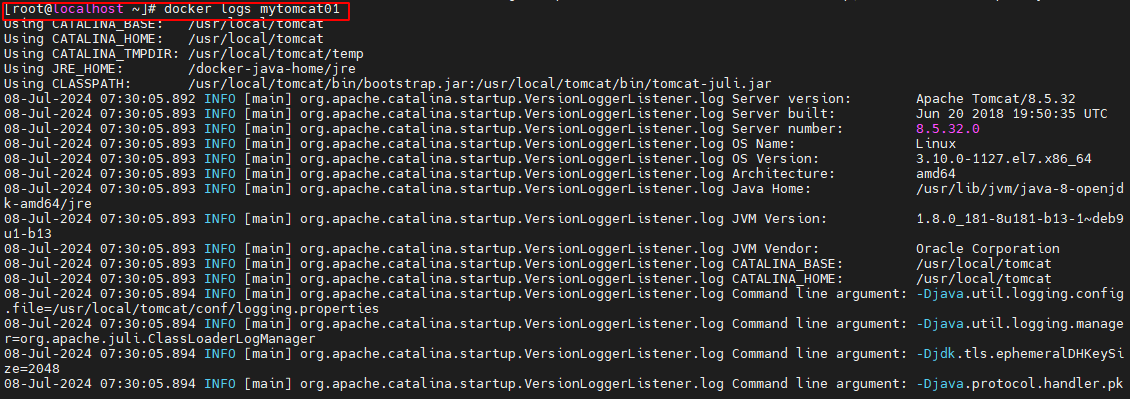
4.8 容器日志查看命令
docker logs [容器]可以查看指定容器中应用的运行日志,无论该容器是运行还是停止状态
4.8.1 查看所有日志 logs
docker logs 查看的是所有容器中应用的运行日志。这个日志对于不同的容器来说,其日志内容是不同的。由 docker run 命令的[command]决定(如果没有则由 Dockerfile 中的 CMD指令决定)
对启动了 tomcat 的 tomcat 容器来说,这个日志是 tomcat 启停日志。
对于没有启动 tomcat 的 tomcat 容器来说,这个日志是/bin/bash 的运行历史记录。对于 ubuntu 容器来说,这个日志是/bin/bash 的运行历史记录。
4.8.2 查看最后的日志 -n
通过添加选项-n 或–tail 可以指定要显示的最后几条日志
docker logs -n 5 mytomcat01

4.8.3 查看指定时间内的日志 --since
通过添加选项–since 可以指定要显示自从指定时间以来的日志。这个时间可以是一个绝对时间,也可以是一个相对时长。
-
下面使用的是绝对时间:显示自从 2024 年 7 月 8 日后产生日志的最后 3 条
docker logs --since="2024-07-08" --tail=3 mytomcat01
-
下面使用的是相对时长:显示自从 50 分钟之前产生日志中的最后 3 条。其中 m 表示分,可以使用 s 表示秒,h 表示小时
docker logs --since="50m" --tail=3 mytomcat01
4.8.4 查看指定时间外的日志 --until
通过添加选项–until 可以指定要显示截止到指定时间之前的日志。这个时间可以是一个绝对时间,也可以是一个相对时长。下面使用的是绝对时间:显示截止到 2024 年 7 月 9 日前产生日志的最后 3 条。
docker logs --until="2024-07-09" --tail=3 mytomcat01

下面使用的是相对时长:显示截止到 20 分钟之前产生日志中的最后 3 条。
docker logs --until=20m --tail=3 mytomcat01

4.8.5 查看日志时间戳 -t
如果要查看某日志的详细时间戳,可以使用-t 选项。下面的命令查看的是最后 3 条日志的时间戳,并与不添加-t 的输出进行了对比。

4.8.6 查看动态日志 tail=3
docker logs -f --tail=3 mytomcat01
通过添加选项-f 可以查看运行中容器的动态日志,以下命令用于查看 mytomcat 的最后三条动态日志。其会占用命令行,一直等待日志的输出。

4.9 容器启停命令
4.9.1 启动 start
通过 docker start 命令可以启动已经停止的指定容器,这个容器可以通过容器名称指定,也可以通过容器 ID 指定
docker start mytomcat01

4.9.2 重启 restart
通过 docker restart 命令可以重启处于运行状态的指定容器。
docker restart mytomcat03

4.9.3 优雅停止 stop
通过 docker stop 命令可以优雅停止指定容器。所谓优雅停止是指,若当前容器正在被其它进程访问,则在访问结束后再停止。
docker stop mytomcat03

4.9.4 强制停止 kill
通过 docker kill 命令可以强制停止指定容器。所谓强制停止是指,无论容器当前是否被其它进程访问都直接停止。
docker kill mytomcat03

4.9.5 **停止所有容器 **ps -qa
无论是 docker kill 还是 docker stop,都可使用下面方式停止所有容器。因为这两个命令的参数都可以是容器 ID。

4.9.6 暂停 pause
通过 docker pause 命令可以暂停容器对外提供服务。本身容器是没有被影响的

4.9.7 解除暂停 unpause
通过 docker unpause 命令可解除容器的暂停服务状态
docker unpause mytomcat01

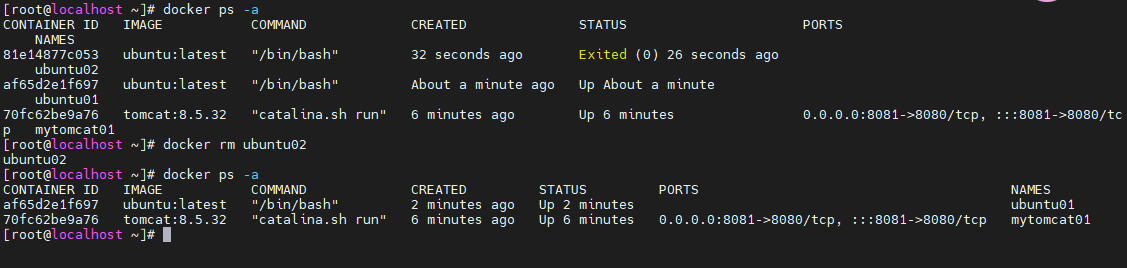
4.10 容器删除命令
4.10.1 正常删除 rm
docker rm 命令在默认情况下,要删除的容器必须是已经停止的容器。当然,这个容器可以使用容器名或容器 ID 指定。
docker rm ubuntu02
4.10.2 强制删除 rm -f
在 docker rm 命令中添加-f 可实现强制删除容器。即,无论容器是否停止都会删除。
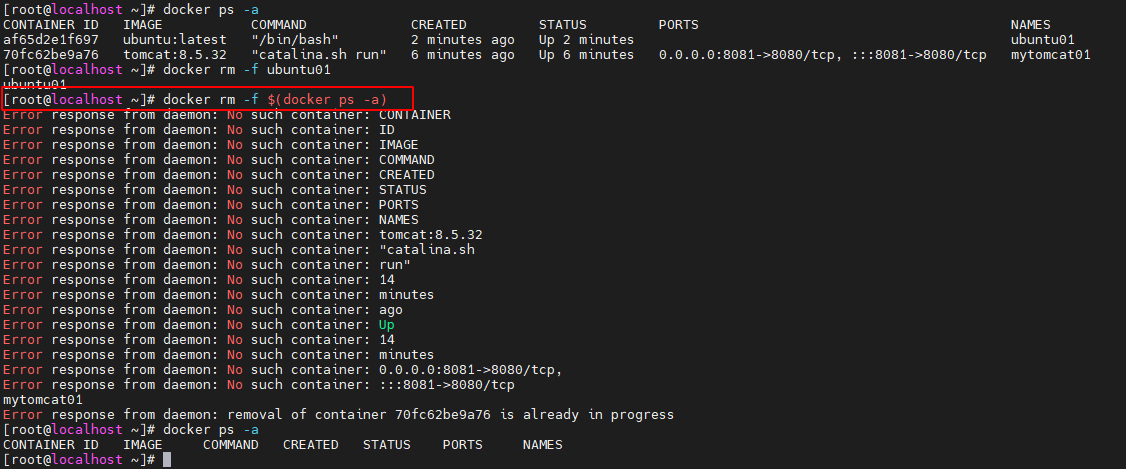
docker rm -f ubuntu01

4.10.3 删除所有容器
docker rm -f $(docker ps -aq)
4.11 文件传递 docker cp
docker cp 命令可以完成容器与宿主机中文件/目录的相互复制,无论该容器是否处于运行状态。
4.11.1 容器文件复制宿主机 cp
将docker 中的export.tar文件拷贝到宿主机的/usr/local目录中
docker cp mytomcat01:/usr/local/tomcat/export.tar /usr/local

4.11.2 将宿主机文件复制到容器中
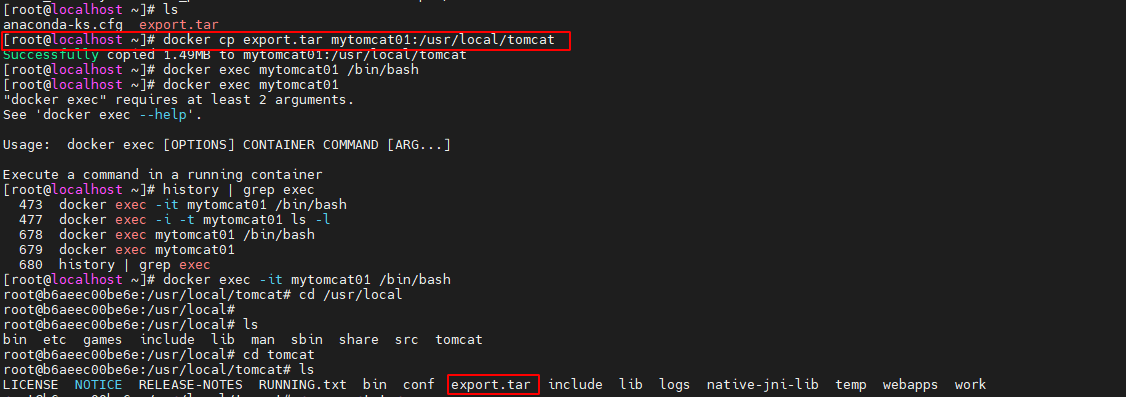
以下命令用于将宿主机中当前目录下的 export.tar 文件复制到 mytomcat01 容器的/usr/local/tomcat 目录中。若要查看容器中是否已经存在了 export.tar 文件,需要首先启动该容器。
docker cp export.tar mytomcat01:/usr/local/tomcat
4.11.3 不支持容器间的 cp
docker cp 命令不支持容器间的文件传递。
docker cp mytomcat01:/usr/local/tomcat/export.tar mytomcat02:/usr

4.12 提交容器为镜像
通过 docker commit 命令可以将一个容器文件系统的当前快照生成为一个新的镜像。
需求:这里要在一个 Ubuntu 容器或 Centos 容器中安装 net-tools工具包。为了方便演示,这里选择 CentOS 容器,直接使用 yum 安装。当然,如果使用 Ubuntu 容器也可以,要么直接使用 apt-get 安装 net-tools,要么先安装 yum 后再安装 net-tools。
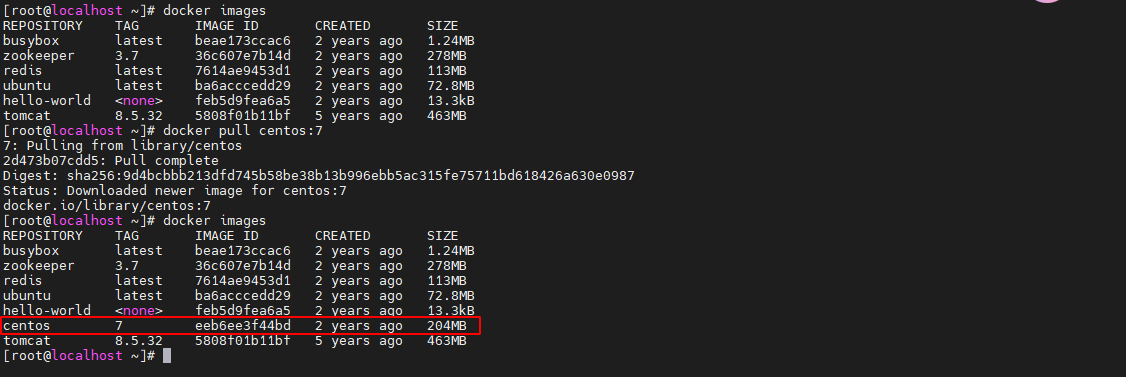
首先下载centos7
docker pull centos:7
4.12.1 修改容器层
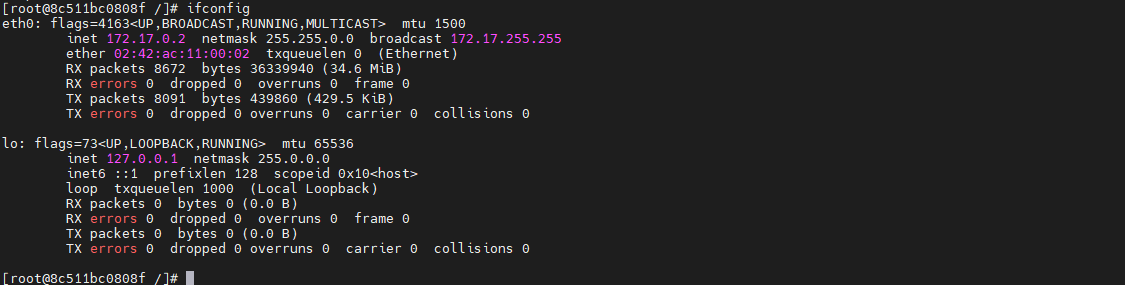
首先创建并启动一个容器,例如 centos:7 镜像的容器。然后发现该容器中是没有安装ifconfig 命令的
docker run --name centos01 -it centos:7

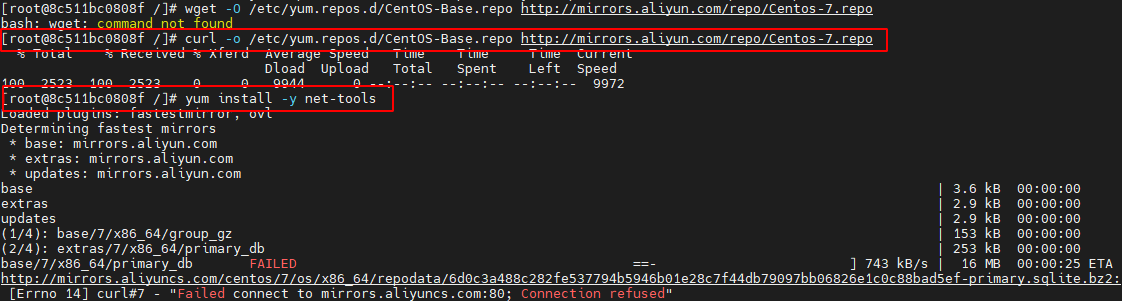
使用ifconfig查看ip发现无此命令,安装 net-tools 网络工具命令包。如果下载提示无法解析路径,则可以先配置yum源
# 1、备份备份官方的原yum源的配置
mv /etc/yum.repos.d/CentOS-Base.repo /etc/yum.repos.d/CentOS-Base.repo.backup# 2、下载Centos-7.repo文件
# wget -O /etc/yum.repos.d/CentOS-Base.repo http://mirrors.aliyun.com/repo/Centos-7.repo# 注意:部分小伙伴可能没有安装wget,需要先安装wget,或者用下面的命令下载repo文件
curl -o /etc/yum.repos.d/CentOS-Base.repo http://mirrors.aliyun.com/repo/Centos-7.repo# 执行下载工具
yum install -y net-tools
4.12.2 生成镜像docker commit
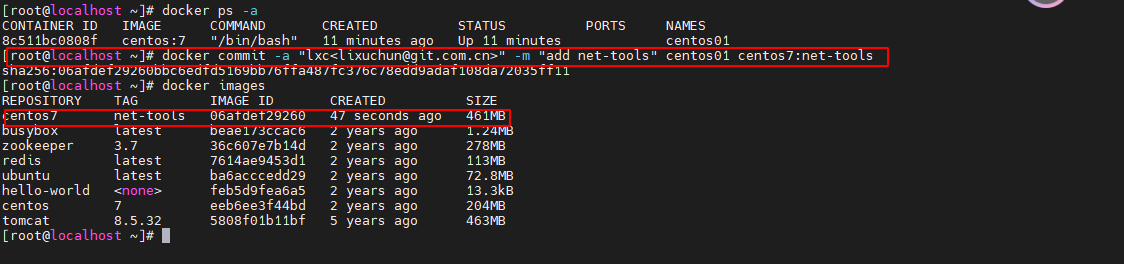
下面要将已经安装了 ifconfig 命令的容器生成为一个镜像,以方便后期自己或他人使用
docker commit -a "lxc<lixuchun@git.com.cn>" -m "add net-tools" centos01 centos7:net-tools
这里指定生成的镜像的<repository>为 centos7,<tag>为 net-tools。
4.12.3 使用新镜像
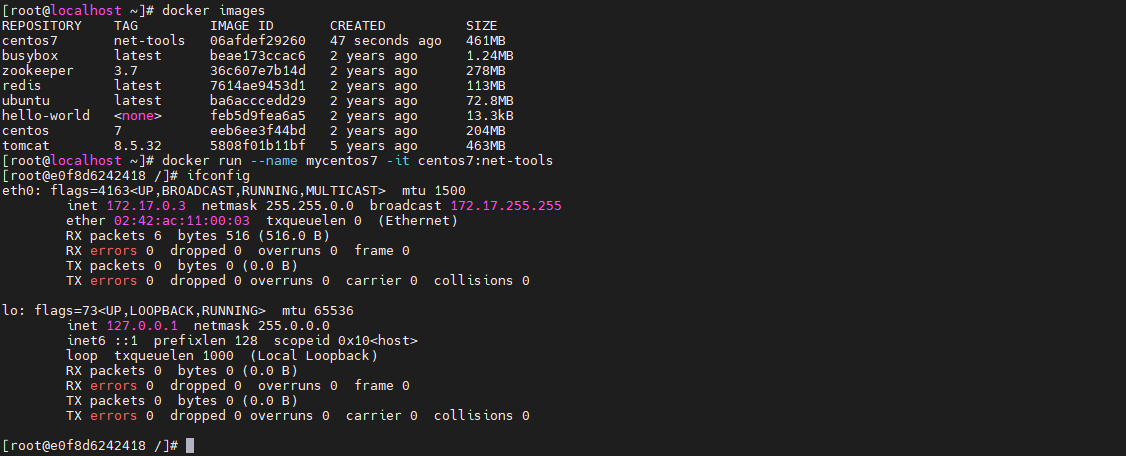
下面是使用新生成的镜像创建并启动一个容器,发现其中的 ifconfig 命令是可以使用的。
docker run --name mycentos7 -it centos7:net-tools
4.12.4 生成悬虚镜像
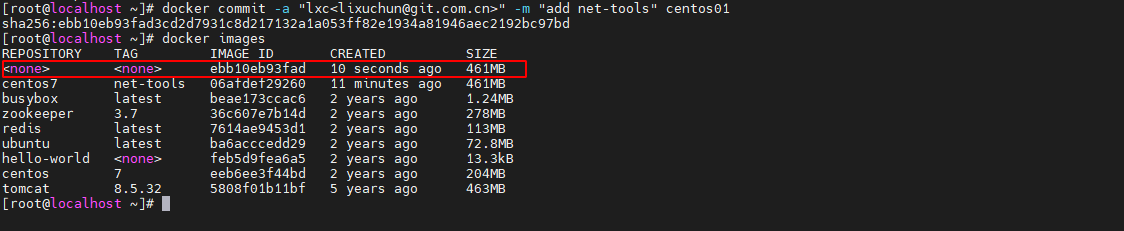
悬虚镜像,即没有<repository>与<tag>的镜像。悬虚镜像一般都是由于某些失误操作或其它一些操作而生成的副产物,一般是要被清除掉的。如果非要使用悬虚镜像,那只能通过其 ImageID 来使用了。
下面要将已经安装了 ifconfig 命令的容器生成为一个悬虚镜像,即没有指定<repository>与<tag>
4.13 导入/导出容器
在上一章中学习了 docker save 与 docker load 命令,分别用于导出/导入镜像。这里要学习的 docker export 与 docker import 命令分别用于导出/导入容器。
4.13.1 导出容器 export
docker export 命令用于将一个容器的文件系统导出为 tar 文件。
例如,下面的命令是将tomcat:8.5.32 镜像的容器 tomcat01 导出到当前/root 目录的 tomcat8.tar 文件中
docker export -o tomcat8.tar tomcat01

4.13.2 导入容器 import
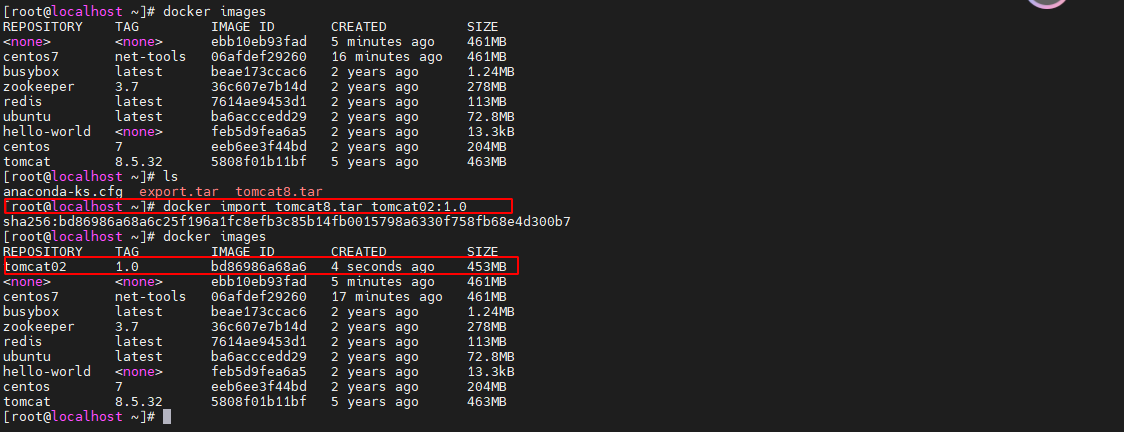
docker import 命令用于根据指定的 tar 文件构建新的镜像。下面的命令是将当前目录下的 tomcat8.tar 导出为镜像 mytomcat:1.0。
docker import tomcat8.tar tomcat02:1.0
4.13.3 与 save/load 命令的对比
-
export 与 save
export 作用于容器,save 作用于镜像,但它们导出的结果都为 tar 文件
export 一次只能对一个容器进行导出,save 一次可以对多个镜像进行导出
export 只是对当前容器的文件系统快照进行导出,其会丢弃原镜像的所有历史记录与元数据信息,save 则是保存了原镜像的完整记录
-
import 与 load
import 导入的是容器包,load 加载的是镜像包,但最终都会恢复为镜像
import 恢复的镜像只包含当前镜像一层,load 恢复的镜像与原镜像的分层是完全相同的
import 恢复的镜像就是新构建的镜像,与原镜像的 ImageID 不同;load 恢复的镜像与原镜像是同一个镜像,即 ImageID 相同
import 可以为导入的镜像指定<repository>与<tag>,load 加载的镜像不能指定<repository>与<tag>,与原镜像的相同
4.13.4 与 docker commit 的对比
- 相同点:docker export + docker import 会将一个容器变为一个镜像,docker commit 也可以将一个容器变一个镜像。
- 不同点:docker export + docker import 恢复的镜像仅包含原容器生成的一层分层,docker commit 生成的镜像中包含容器的原镜像的所有分层信息。
4.14 docker system 命令集
docker system 是一个命令集,其有四个子命令
docker system --help

4.14.1 docker 磁盘占用数据 df
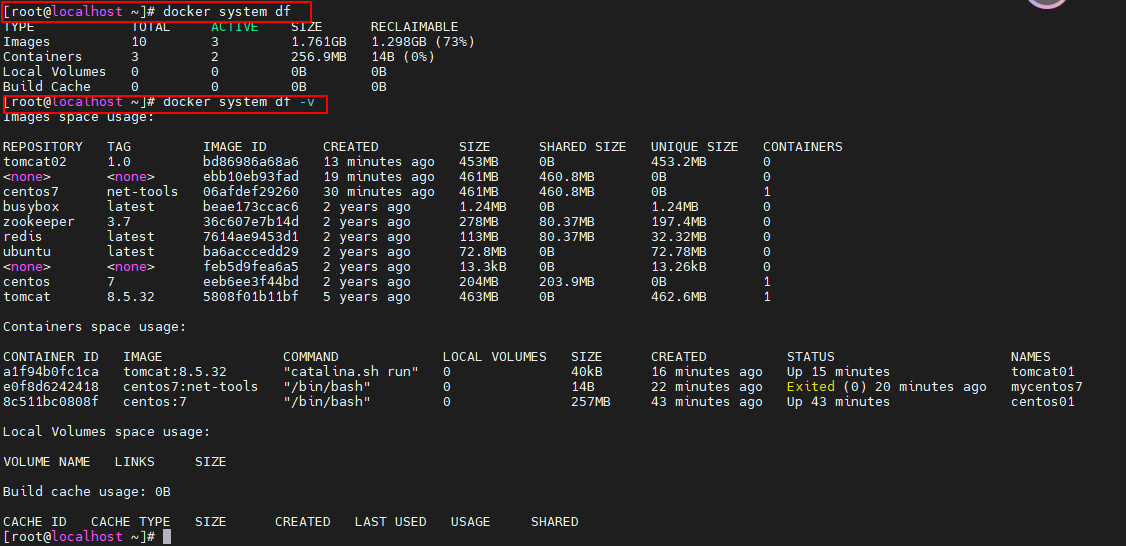
docker system df 用于查看 docker 各部分占用情况。
docker system df
# 如果要获取更为详细的占用情况,可添加-v 选项。
docker system df -v
4.14.2 docker发生过的事件 events
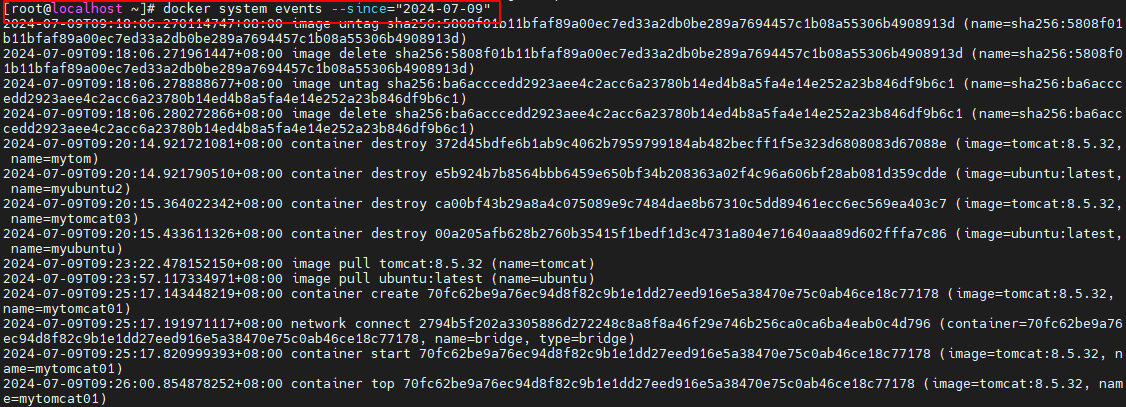
docker system events 命令等价于 docker events 命令,可查看指定日间之内(–since)或之外(–until)在 docker 上所发生的所有事件。这些事件包含运行过的命令有 docker 内部执行的一些操作。
docker system events --since="2024-07-09"
4.14.3 查看 docker 详情 info
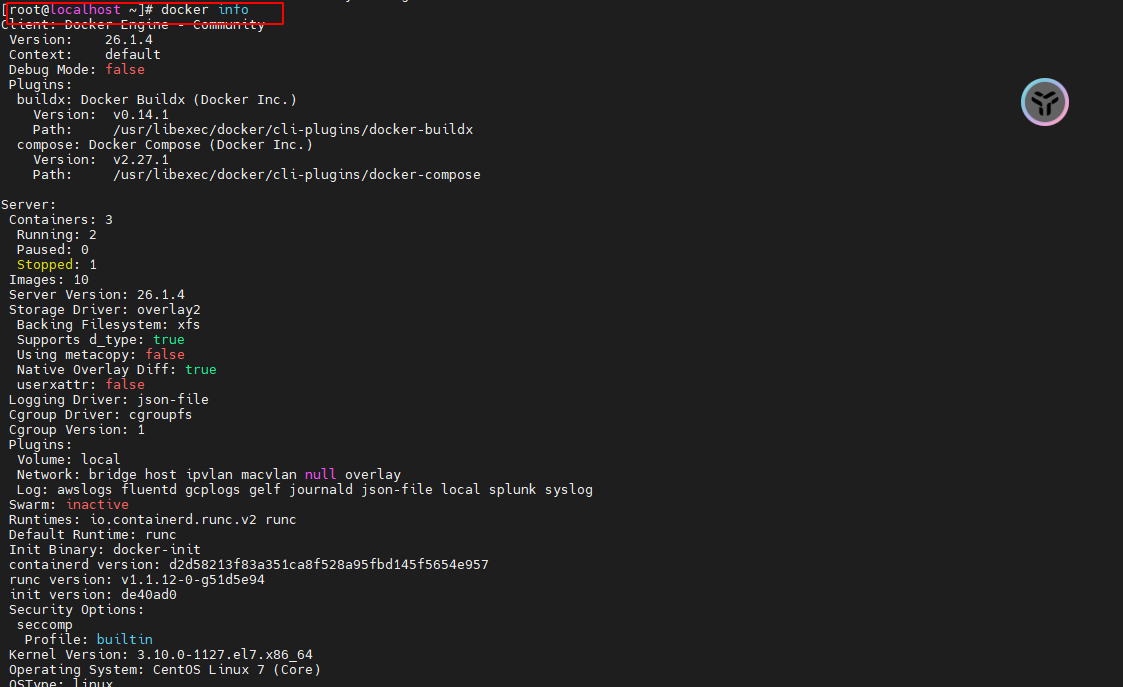
docker system info命令等价于docker info,用于查看当前docker的详情。包括dockerClient与 docker Server 详情。其中 docker server 包含镜像、容器情况,docker 所在系统的软硬件情况等
docker info
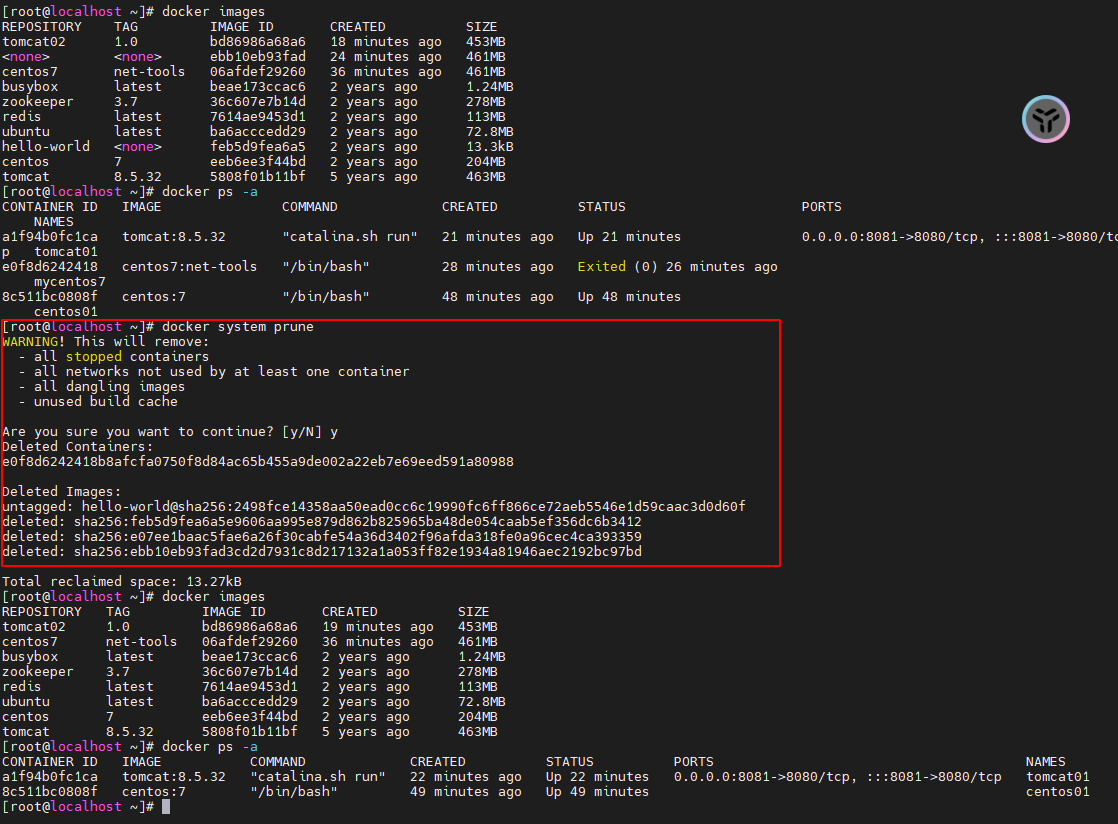
4.14.4 删除docker中无用数据 prune
docker system prune 命令用于删除 docker 中的无用数据,这些无用数据包含已经停止的容器、没有任何连接容器的网络、悬空镜像,及悬空镜像的构建缓存。
docker system prune
相关文章:
简单的docker学习 第4章 docker容器
第4章 Docker容器 4.1 容器基础 4.1.1 容器启动流程 通过 docker run 命令可以启动运行一个容器。该命令在执行时首先会在本地查找指定的镜像,如果找到了,则直接启动,否则会到镜像中心查找。如果镜像中心存在该镜像,则会下载到…...
零基础入门转录组数据分析——机器学习算法之SVM-RFE(筛选特征基因)
零基础入门转录组数据分析——机器学习算法之SVM-RFE(筛选特征基因) 目录 零基础入门转录组数据分析——机器学习算法之SVM-RFE(筛选特征基因)1. SVM-RFE基础知识2. SVM-RFE(Rstudio)——代码实操2. 1 数据…...
Python酷库之旅-第三方库Pandas(067)
目录 一、用法精讲 266、pandas.Series.dt.second属性 266-1、语法 266-2、参数 266-3、功能 266-4、返回值 266-5、说明 266-6、用法 266-6-1、数据准备 266-6-2、代码示例 266-6-3、结果输出 267、pandas.Series.dt.microsecond属性 267-1、语法 267-2、参数 …...
Spring快速学习
目录 IOC控制反转 引言 IOC案例 Bean的作用范围 Bean的实例化 bean生命周期 DI 依赖注入 setter注入 构造器注入 自动装配 自动装配的方式 注意事项; 集合注入 核心容器 容器的创建方式 Bean的三种获取方式 Bean和依赖注入相关总结 IOC/DI注解开发 注解开发…...
【Web开发手礼】探索Web开发的秘密(十五)-Vue2(2)AJAX、前后端分离、前端工程化
主要介绍了AJAX、前后端分离所需的YApi、前端工程化所需要的环境安装!!! 目录 前言 AJAX 原生Ajax Axios Axios入门 案例 前后端分离开发 YApi 前端工程化 环境准备 总结 前言 主要介绍了AJAX、前后端分离所需的YApi、前端工…...

Phalco安装过程以及踩的一些坑(mac环境)
一 背景 公司用Phalcon框架好长时间了,中途发现了一些Phalcon使用的上的问题,于是想在本地搭建一套Phalcon的环境,方便排查问题使用。 二 Mac系统下的安装 看了很多说法,最终发现还是官网给力,安装Phalcon使用下列命令即可(前提条件是PHP已安装好,工具pecl也安装好了):…...

Ubuntu修改双系统默认启动顺序
1.打开grub的默认启动配置文件 sudo gedit /etc/default/grub# If you change this file, run update-grub afterwards to update # /boot/grub/grub.cfg. # For full documentation of the options in this file, see: # info -f grub -n Simple configurationGRUB_DEFAULT…...
高仲富:49岁搞AI,白天种菜卖菜,晚上学数学搞程序
这是《开发者说》的第13期,本期我们邀请的开发者是高仲富,曾是一位数学老师,自学成为一名程序员,在北京漂过,后逃回了成都,一边与病魔抗争,一边写代码,一写就是15年,制作…...

光线追踪(纹理映射)
最近在跟着ray trace in one week来学习光线追踪(很多概念茅塞顿开)做到一半想着记录一下(比较随心)上面是之前的效果。ray trace in one week Texture Coordinates for Spheres(球体纹理坐标) u, v 纹理…...

传统产品经理VS现在AI产品经理,你要学习的太多了,超详细收藏我这一篇就够了
传统产品经理想要转行成为AI产品经理,需要经历一系列的学习和实践过程。下面是一份详细的学习路线图,旨在帮助你顺利转型。 学习路线图 了解AI基础知识 AI概览:阅读《人工智能:一种现代的方法》这样的书籍,以获得对AI…...
C#使用Socket实现TCP服务器端
1、TCP服务器实现代码 using System; using System.Collections.Generic; using System.Linq; using System.Net; using System.Net.Sockets; using System.Text; using System.Threading; using System.Threading.Tasks;namespace PtLib.TcpServer {public delegate void Tcp…...
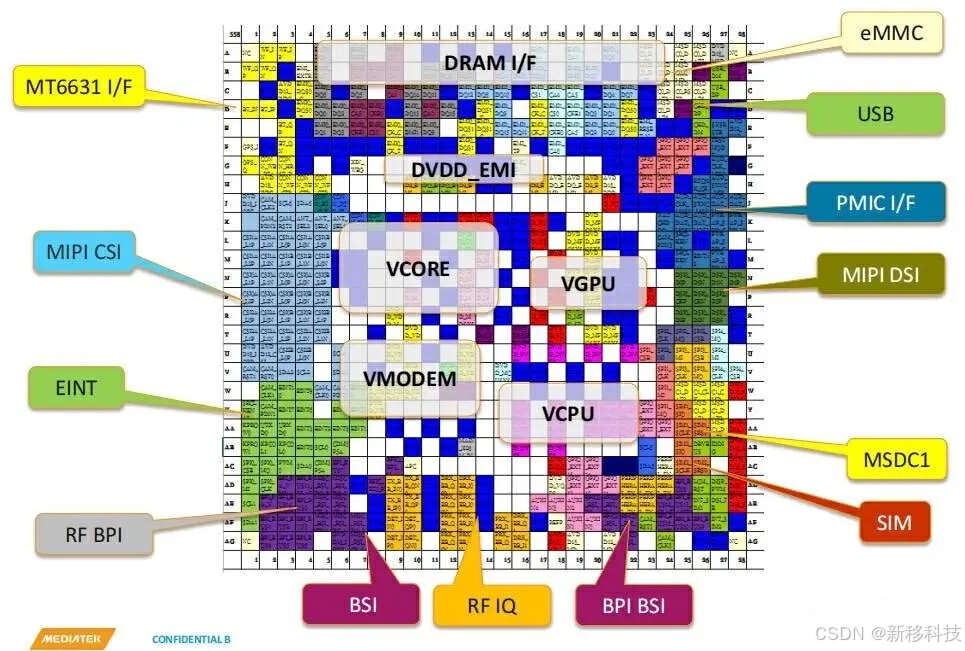
MTK联发科MT8766/MT8166安卓核心板性能参数对
MT8766核心板 采用联发科四核2G主频芯片方案,国内4G全网通。12nm先进工艺,支持 Android9.0系统。 GPU 采用超强 IMG GE8300 ,主频600MHz。支持高速LPDDR4/X,主频高达1600MHz。支持EMMC5.1。标配 WIFI 802.11 ac/abgn,BT 5.0。 支持…...
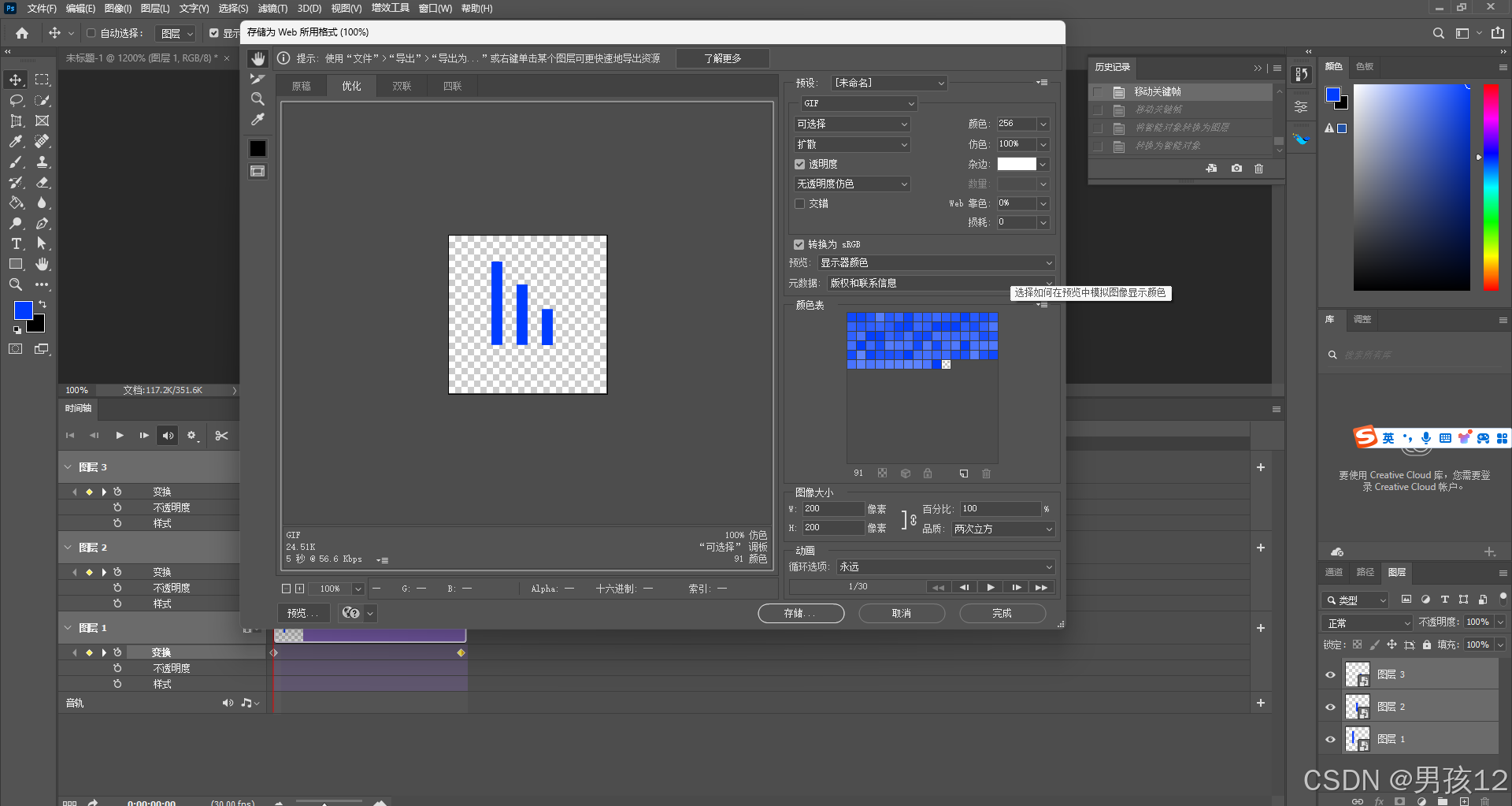
ps绘制动图
ps绘制动图教程(简易版)-直播gif动态效果图 第一步 打开ps绘制几个简单的长方形 第二步 将图层转化为智能图层 第三部 在窗口找到时间轴创建时间轴 第五步 通过变换来鼠标控制图像的变化并打下结束点 第六部 通过图像中的图像大小控制gif的大小 第七部 …...

AI学习指南机器学习篇-强化学习和深度学习简介
AI学习指南机器学习篇-强化学习和深度学习简介 强化学习和深度学习基本概念回顾 强化学习是一种机器学习方法,其目标是让智能体通过与环境的交互来学习最优的行为策略。在强化学习中,智能体不需要标记的训练数据,而是通过试错来提升自己的表…...

yolov8 bytetrack onnx模型推理
原文:yolov8 bytetrack onnx模型推理 - 知乎 (zhihu.com) 一、pt模型转onnx from ultralytics import YOLO# Load a model model YOLO(weights/yolov8s.pt) # load an official model # model YOLO(path/to/best.pt) # load a custom trained# Export the mod…...
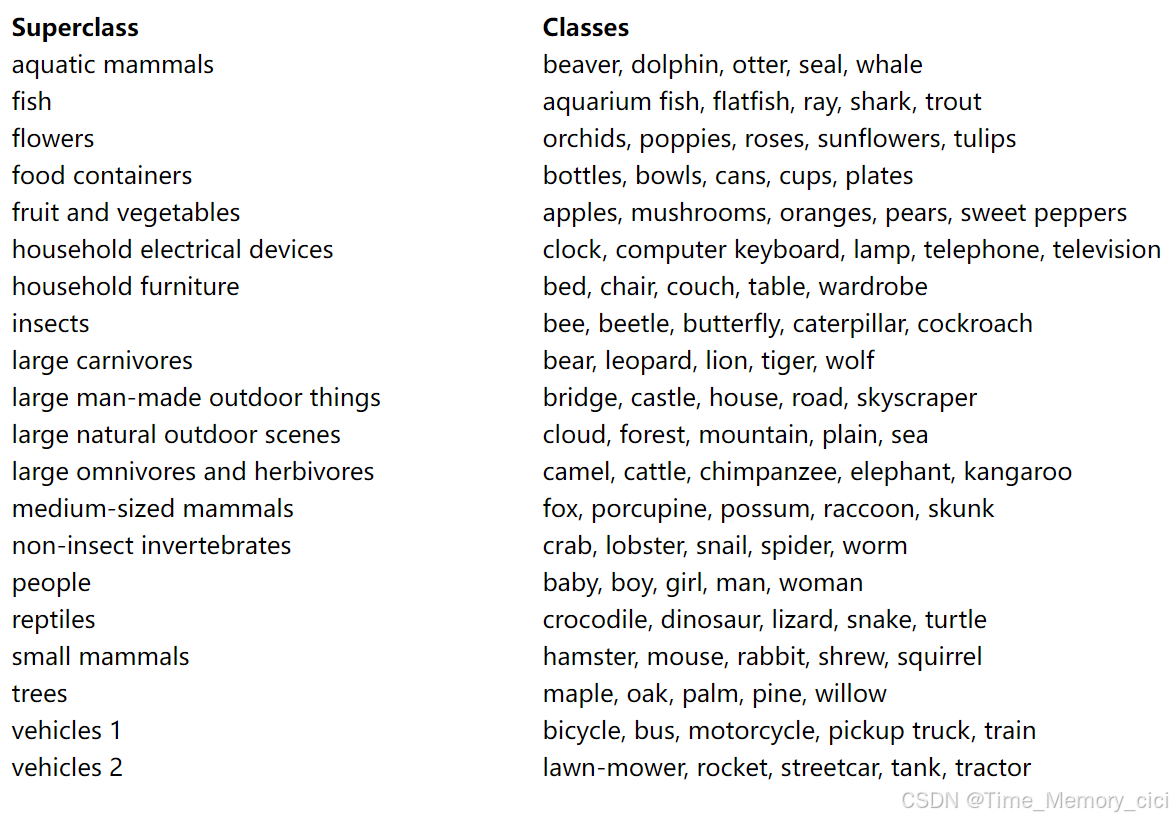
ImageNet数据集和CIFAR-10数据集
一、为什么需要大量数据集 人工智能其实就是大数据的时代,无论是目标检测、图像分类、还是现在植入我们生活的推荐系统,“喂入”神经网络的数据越多,则识别效果越好、分类越准确。因此开源大型数据集的研究团队为人工智能的发展做了大量贡献…...
Go语言编程大全,web微服务数据库十大专题精讲
本课程主要从数据结构、Go Module 依赖管理、IO编程、数据库编程、消息队列、加密技术与网络安全、爬虫与反爬虫、web开发、微服务通用技术、Kitex框架等方面讲解~ 链接:https://pan.quark.cn/s/d65337a0e60d...
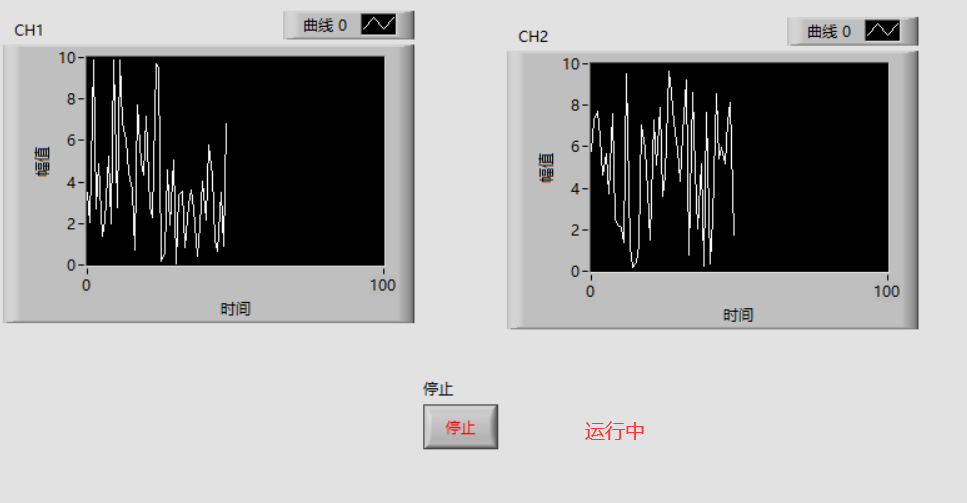
【LabVIEW学习篇 - 13】:队列
文章目录 队列 队列 队列通常情况下是一种先入先出(FIFO:First in First out)的数据结构,常用作数据缓存,通过队列结构可以保证数据有序的传递,避免竞争和冲突。 案例:利用队列,模…...

大语言模型综述泛读之Large Language Models: A Survey
摘要 这篇文章主要回顾了一些最突出的LLMs(GPT, LLaMA, PaLM)并讨论了它们的特点、贡献和局限性,就如何构建增强LLMs做了一个技术概述,然后调研了为LLM训练、微调和评估而准备的N多种流行数据集,审查了使用的LLM评价指标,在一组有代表性的基准上比较了几个流行的LLMs;最…...
奇偶函数的性质及运算
目录 定义 注意 特征 运算 拓展 定义 设函数f(x)的定义域D; 如果对于函数定义域D内的任意一个x,都有f(-x)-f(x),那么函数f(x)就叫做奇函数。如果对于函数定义域D内的任意一个x…...

Qwen3-Coder-30B-A3B-Instruct-FP8:终极代码模型对比分析指南
Qwen3-Coder-30B-A3B-Instruct-FP8:终极代码模型对比分析指南 【免费下载链接】Qwen3-Coder-30B-A3B-Instruct-FP8 项目地址: https://ai.gitcode.com/hf_mirrors/Qwen/Qwen3-Coder-30B-A3B-Instruct-FP8 在当今AI代码生成领域,Qwen3-Coder-30B-…...

Spring Cloud AWS 实战教程:构建高可用 SQS 消息队列应用 [特殊字符]
Spring Cloud AWS 实战教程:构建高可用 SQS 消息队列应用 🚀 【免费下载链接】spring-cloud-aws The New Home for Spring Cloud AWS 项目地址: https://gitcode.com/gh_mirrors/sp/spring-cloud-aws Spring Cloud AWS 是一个强大的开源框架&…...

癫痫手术精准定位:基于脑电信号昼夜节律与多生物标志物的机器学习分析框架
1. 项目概述:当机器学习遇见脑电信号,如何让癫痫手术更精准?作为一名长期耕耘在生物医学信号处理与机器学习交叉领域的工程师,我常常思考如何将算法模型从实验室的“玩具”变成临床医生手中可靠的“手术刀”。癫痫,这个…...

3分钟掌握HashCalculator:你的文件完整性守护专家
3分钟掌握HashCalculator:你的文件完整性守护专家 【免费下载链接】HashCalculator 哈希值计算工具,批量计算/批量校验/查找重复文件/改变哈希值等,支持集成到系统右键菜单 项目地址: https://gitcode.com/gh_mirrors/ha/HashCalculator …...

嵌入式快速原型开发:基于Sceptre平台与LPC2148的实战指南
1. 项目概述:Sceptre,一个被低估的嵌入式快速原型利器 在嵌入式开发的世界里,我们总是在寻找那个“刚刚好”的平台:它要足够强大,能跑复杂的算法;要足够小巧,能塞进各种外壳;要足够便…...

开启Python GUI开发新纪元:Tkinter Designer可视化界面自动化生成终极指南
开启Python GUI开发新纪元:Tkinter Designer可视化界面自动化生成终极指南 【免费下载链接】Tkinter-Designer An easy and fast way to create a Python GUI 🐍 项目地址: https://gitcode.com/gh_mirrors/tk/Tkinter-Designer 在Python GUI开发…...

炉石传说自动对战助手:5分钟上手,彻底解放双手的终极指南
炉石传说自动对战助手:5分钟上手,彻底解放双手的终极指南 【免费下载链接】Hearthstone-Script Hearthstone script(炉石传说脚本) 项目地址: https://gitcode.com/gh_mirrors/he/Hearthstone-Script 还在为每天重复的炉石…...

DAIR-V2X-V数据集深度评测:与KITTI、nuScenes比,它到底强在哪?
DAIR-V2X-V数据集深度评测:与KITTI、nuScenes比,它到底强在哪? 当技术团队着手开发面向中国道路的自动驾驶系统时,数据集的选择往往成为第一个关键决策点。过去十年间,KITTI和nuScenes等国际数据集一直是行业标杆&…...

LoRa物联网与动态基线算法在养殖体温监测中的实战应用
1. 项目概述:为什么我们需要一个智能体温监测系统?在规模化养殖场里干了十几年,我见过太多因为体温异常没被及时发现而导致的损失。一头育肥猪突然不吃食,等饲养员第二天巡栏发现时,可能已经高烧好几天,继发…...

如何快速定制Office界面:终极开源工具使用指南
如何快速定制Office界面:终极开源工具使用指南 【免费下载链接】office-ribbonx-editor An overhauled fork of the original Custom UI Editor for Microsoft Office, built with WPF 项目地址: https://gitcode.com/gh_mirrors/of/office-ribbonx-editor O…...