FrereRTOS事件组
文章目录
- 一、事件组概念与操作
- 1、事件组的概念
- 2、事件组的操作
- 二、事件组函数
- 1、创建
- 2、删除
- 3、设置事件
- 4、等待事件
- 5、同步点
- 三、示例:广播
- 四、示例:等待一个任意事件
- 五、示例: 等待多个事件都发生
学校组织秋游,组长在等待:
- 张三:我到了
- 李四:我到了
- 王五:我到了
- 组长说:好,大家都到齐了,出发!
秋游回来第二天就要提交一篇心得报告,组长在焦急等待:张三、李四、王五谁先写好就交谁的。
在这个日常生活场景中:
- 出发:要等待这3个人都到齐,他们是"与"的关系
- 交报告:只需等待这3人中的任何一个,他们是"或"的关系
在FreeRTOS中,可以使用事件组(event group)来解决这些问题。
本章涉及如下内容:
- 事件组的概念与操作函数
- 事件组的优缺点
- 怎么设置、等待、清除事件组中的位
- 使用事件组来同步多个任务
一、事件组概念与操作
1、事件组的概念
事件组可以简单地认为就是一个整数:
- 每一位表示一个事件
- 每一位事件的含义由程序员决定,比如:Bit0表示用来串口是否就绪,Bit1表示按键是否被按下
- 这些位,值为1表示事件发生了,值为0表示事件没发生
- 一个或多个任务、ISR都可以去写这些位;一个或多个任务、ISR都可以去读这些位
- 可以等待某一位、某些位中的任意一个,也可以等待多位
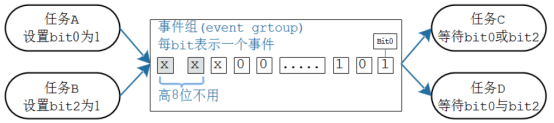
事件组用一个整数来表示,其中的高8位留给内核使用,只能用其他的位来表示事件。那么这个整数是多少位的?
- 如果configUSE_16_BIT_TICKS是1,那么这个整数就是16位的,低8位用来表示事件
- 如果configUSE_16_BIT_TICKS是0,那么这个整数就是32位的,低24位用来表示事件
- 如果configUSE_16_BIT_TICKS是用来表示Tick Count的,怎么会影响事件组?这只是基于效率来考虑
- 如果configUSE_16_BIT_TICKS是1,就表示该处理器使用16位更高效,所以事件组也使用16位
- 如果configUSE_16_BIT_TICKS是0,就表示该处理器使用32位更高效,所以事件组也使用32位
2、事件组的操作
事件组和队列、信号量等不太一样,主要集中在2个地方:
- 唤醒谁?
- 队列、信号量:事件发生时,只会唤醒一个任务
- 事件组:事件发生时,会唤醒所有符号条件的任务,简单地说它有"广播"的作用
- 是否清除事件?
- 队列、信号量:是消耗型的资源,队列的数据被读走就没了;信号量被获取后就减少了
- 事件组:被唤醒的任务有两个选择,可以让事件保留不动,也可以清除事件
以上图为列,事件组的常规操作如下:
- 先创建事件组
- 任务C、D等待事件:
- 等待什么事件?可以等待某一位、某些位中的任意一个,也可以等待多位。简单地说就是"或"、"与"的关系。
- 得到事件时,要不要清除?可选择清除、不清除。
- 任务A、B产生事件:设置事件组里的某一位、某些位
二、事件组函数
1、创建
使用事件组之前,要先创建,得到一个句柄;使用事件组时,要使用句柄来表明使用哪个事件组。
有两种创建方法:动态分配内存、静态分配内存。函数原型如下:
/* 创建一个事件组,返回它的句柄。* 此函数内部会分配事件组结构体 * 返回值: 返回句柄,非NULL表示成功*/
EventGroupHandle_t xEventGroupCreate( void );/* 创建一个事件组,返回它的句柄。* 此函数无需动态分配内存,所以需要先有一个StaticEventGroup_t结构体,并传入它的指针* 返回值: 返回句柄,非NULL表示成功*/
EventGroupHandle_t xEventGroupCreateStatic( StaticEventGroup_t * pxEventGroupBuffer );
2、删除
对于动态创建的事件组,不再需要它们时,可以删除它们以回收内存。
vEventGroupDelete可以用来删除事件组,函数原型如下:
/** xEventGroup: 事件组句柄,你要删除哪个事件组*/
void vEventGroupDelete( EventGroupHandle_t xEventGroup )
3、设置事件
可以设置事件组的某个位、某些位,使用的函数有2个:
- 在任务中使用xEventGroupSetBits()
- 在ISR中使用xEventGroupSetBitsFromISR()
有一个或多个任务在等待事件,如果这些事件符合这些任务的期望,那么任务还会被唤醒。
函数原型如下:
/* 设置事件组中的位* xEventGroup: 哪个事件组* uxBitsToSet: 设置哪些位? * 如果uxBitsToSet的bitX, bitY为1, 那么事件组中的bitX, bitY被设置为1* 可以用来设置多个位,比如 0x15 就表示设置bit4, bit2, bit0* 返回值: 返回原来的事件值(没什么意义, 因为很可能已经被其他任务修改了)*/
EventBits_t xEventGroupSetBits( EventGroupHandle_t xEventGroup,const EventBits_t uxBitsToSet );/* 设置事件组中的位* xEventGroup: 哪个事件组* uxBitsToSet: 设置哪些位? * 如果uxBitsToSet的bitX, bitY为1, 那么事件组中的bitX, bitY被设置为1* 可以用来设置多个位,比如 0x15 就表示设置bit4, bit2, bit0* pxHigherPriorityTaskWoken: 有没有导致更高优先级的任务进入就绪态? pdTRUE-有, pdFALSE-没有* 返回值: pdPASS-成功, pdFALSE-失败*/
BaseType_t xEventGroupSetBitsFromISR( EventGroupHandle_t xEventGroup,const EventBits_t uxBitsToSet,BaseType_t * pxHigherPriorityTaskWoken );
值得注意的是,ISR中的函数,比如队列函数xQueueSendToBackFromISR、信号量函数xSemaphoreGiveFromISR,它们会唤醒某个任务,最多只会唤醒1个任务。
但是设置事件组时,有可能导致多个任务被唤醒,这会带来很大的不确定性。所以xEventGroupSetBitsFromISR函数不是直接去设置事件组,而是给一个FreeRTOS后台任务(daemon task)发送队列数据,由这个任务来设置事件组。
如果后台任务的优先级比当前被中断的任务优先级高,xEventGroupSetBitsFromISR会设置**pxHigherPriorityTaskWoken*为pdTRUE。
如果daemon task成功地把队列数据发送给了后台任务,那么xEventGroupSetBitsFromISR的返回值就是pdPASS。
4、等待事件
使用xEventGroupWaitBits来等待事件,可以等待某一位、某些位中的任意一个,也可以等待多位;等到期望的事件后,还可以清除某些位。
函数原型如下:
EventBits_t xEventGroupWaitBits( EventGroupHandle_t xEventGroup,const EventBits_t uxBitsToWaitFor,const BaseType_t xClearOnExit,const BaseType_t xWaitForAllBits,TickType_t xTicksToWait );
先引入一个概念:unblock condition。一个任务在等待事件发生时,它处于阻塞状态;当期望的时间发生时,这个状态就叫"unblock condition",非阻塞条件,或称为"非阻塞条件成立";当"非阻塞条件成立"后,该任务就可以变为就绪态。
函数参数说明列表如下:
| 参数 | 说明 |
|---|---|
| xEventGroup | 等待哪个事件组? |
| uxBitsToWaitFor | 等待哪些位?哪些位要被测试? |
| xWaitForAllBits | 怎么测试?是"AND"还是"OR"? pdTRUE: 等待的位,全部为1; pdFALSE: 等待的位,某一个为1即可 |
| xClearOnExit | 函数提出前是否要清除事件? pdTRUE: 清除uxBitsToWaitFor指定的位 pdFALSE: 不清除 |
| xTicksToWait | 如果期待的事件未发生,阻塞多久。 可以设置为0:判断后即刻返回; 可设置为portMAX_DELAY:一定等到成功才返回; 可以设置为期望的Tick Count,一般用*pdMS_TO_TICKS()*把ms转换为Tick Count |
| 返回值 | 返回的是事件值, 如果期待的事件发生了,返回的是"非阻塞条件成立"时的事件值; 如果是超时退出,返回的是超时时刻的事件值。 |
举例如下:
| 事件组的值 | uxBitsToWaitFor | xWaitForAllBits | 说明 |
|---|---|---|---|
| 0100 | 0101 | pdTRUE | 任务期望bit0,bit2都为1, 当前值只有bit2满足,任务进入阻塞态; 当事件组中bit0,bit2都为1时退出阻塞态 |
| 0100 | 0110 | pdFALSE | 任务期望bit1,bit2某一个为1, 当前值满足,所以任务成功退出 |
| 0100 | 0110 | pdTRUE | 任务期望bit1,bit2都为1, 当前值不满足,任务进入阻塞态; 当事件组中bit1,bit2都为1时退出阻塞态 |
你可以使用*xEventGroupWaitBits()等待期望的事件,它发生之后再使用xEventGroupClearBits()*来清除。但是这两个函数之间,有可能被其他任务或中断抢占,它们可能会修改事件组。
可以使用设置xClearOnExit为pdTRUE,使得对事件组的测试、清零都在*xEventGroupWaitBits()*函数内部完成,这是一个原子操作。
5、同步点
有一个事情需要多个任务协同,比如:
- 任务A:炒菜
- 任务B:买酒
- 任务C:摆台
- A、B、C做好自己的事后,还要等别人做完;大家一起做完,才可开饭
使用*xEventGroupSync()*函数可以同步多个任务:
- 可以设置某位、某些位,表示自己做了什么事
- 可以等待某位、某些位,表示要等等其他任务
- 期望的时间发生后,*xEventGroupSync()*才会成功返回
- xEventGroupSync成功返回后,会清除事件
xEventGroupSync函数原型如下:
EventBits_t xEventGroupSync( EventGroupHandle_t xEventGroup,const EventBits_t uxBitsToSet,const EventBits_t uxBitsToWaitFor,TickType_t xTicksToWait );
参数列表如下:
| 参数 | 说明 |
|---|---|
| xEventGroup | 哪个事件组? |
| uxBitsToSet | 要设置哪些事件?我完成了哪些事件? 比如0x05(二进制为0101)会导致事件组的bit0,bit2被设置为1 |
| uxBitsToWaitFor | 等待那个位、哪些位? 比如0x15(二级制10101),表示要等待bit0,bit2,bit4都为1 |
| xTicksToWait | 如果期待的事件未发生,阻塞多久。 可以设置为0:判断后即刻返回; 可设置为portMAX_DELAY:一定等到成功才返回; 可以设置为期望的Tick Count,一般用*pdMS_TO_TICKS()*把ms转换为Tick Count |
| 返回值 | 返回的是事件值, 如果期待的事件发生了,返回的是"非阻塞条件成立"时的事件值; 如果是超时退出,返回的是超时时刻的事件值。 |
三、示例:广播
本节代码为:23_eventgroup_broadcast,主要看nwatch\game2.c。
car1运行到终点后,会设置bit0事件;car2、car3都等待bit0事件。car1设置bit0事件时,会通知到car2、car3,这就是一个广播作用。
创建事件组,代码如下:
void car_game(void)
{int i,j;int x;g_framebuffer = LCD_GetFrameBuffer(&g_xres, &g_yres, &g_bpp);draw_init();draw_end();xEventCar = xEventGroupCreate();//创建事件组/* 绘制路标 */for(i=0;i<3;i++){for(j=0;j<8;j++){draw_bitmap(16*j, 16+17*i, roadMarking, 8, 1, NOINVERT, 0);draw_flushArea(16*j, 16+17*i, 8, 1); }}#if 0/* 显示三辆小车 */for(i=0;i<3;i++){draw_bitmap(cars[i].x, cars[i].y, carImg, 15, 16, NOINVERT, 0);draw_flushArea(cars[i].x, cars[i].y, 15, 16); }
#endifxTaskCreate(car1_task, "car1task", 128, &cars[0], osPriorityNormal, NULL); xTaskCreate(car2_task, "car2task", 128, &cars[1], osPriorityNormal+2, NULL); xTaskCreate(car3_task, "car3task", 128, &cars[2], osPriorityNormal+2, NULL); //car2和car3优先级一样后 car1到达最右边后设置事件组 car2和car3得到事件组后一起运行 若优先级不同 则优先级高的先运行 到最右边后再到另一个运行
}
car2等待事件,代码如下:
void car2_task(void *params)
{struct car *car = params;struct ir_Data idata;/* 创建自己的队列 */QueueHandle_t xQueueIR = xQueueCreate(10,sizeof(struct ir_Data));/* 注册队列 */RegisterQueueHandle(xQueueIR);/* 初始化小车 */ShowCar(car);/* 等待bit0事件 */xEventGroupWaitBits(xEventCar,(1<<0),pdTRUE,pdFALSE,portMAX_DELAY);while(1){
// /* 读取按键值 */
// xQueueReceive(xQueueIR,&idata,portMAX_DELAY);// /* 控制汽车往右移动 */
// if(idata.data == car->control_key)
// {if(car->x < g_xres - CAR_LENGTH){/* 隐藏汽车 */HideCar(car);/* 调整位置 */car->x += 1 ;//每次按下右移5个单位if(car->x > g_xres - CAR_LENGTH)//超过屏幕分辨率(128)car->x = g_xres - CAR_LENGTH;//到达最大位置处/* 重新显示汽车 */ShowCar(car);/* 这里的delay函数主要是小车的显示延时频率 调用vTaskDelay为阻塞状态 会卡死等待 当执行到调用vTaskDelay的任务时 其他任务能正常运行 调用mdelay则会占用CPU资源 当执行调用mdelay的任务时 其他低优先级任务无法得以运行*///vTaskDelay(50);mdelay(50 );if(car->x == g_xres - CAR_LENGTH){/* 汽车到达最右边 释放信号量 *///xSemaphoreGive(xSemTicks);//car2没有获取信号量 所以当其运行完毕自杀后car1继续运行vTaskDelete(NULL);}}
// }}
}
car3等待事件,代码如下:
void car3_task(void *params)
{struct car *car = params;struct ir_Data idata;/* 创建自己的队列 */QueueHandle_t xQueueIR = xQueueCreate(10,sizeof(struct ir_Data));/* 注册队列 */RegisterQueueHandle(xQueueIR);/* 初始化小车 */ShowCar(car);/* 等待bit0事件 */xEventGroupWaitBits(xEventCar,(1<<0),pdTRUE,pdFALSE,portMAX_DELAY);while(1){
// /* 读取按键值 */
// xQueueReceive(xQueueIR,&idata,portMAX_DELAY);// /* 控制汽车往右移动 */
// if(idata.data == car->control_key)
// {if(car->x < g_xres - CAR_LENGTH){/* 隐藏汽车 */HideCar(car);/* 调整位置 */car->x += 1 ;//每次按下右移5个单位if(car->x > g_xres - CAR_LENGTH)//超过屏幕分辨率(128)car->x = g_xres - CAR_LENGTH;//到达最大位置处/* 重新显示汽车 */ShowCar(car);//vTaskDelay(50);mdelay(50 );if(car->x == g_xres - CAR_LENGTH){/* 汽车到达最右边 释放信号量 *///xSemaphoreGive(xSemTicks);vTaskDelete(NULL);}}
// }}
}
car1运行到终点后,设置事件,代码如下:
void car1_task(void *params)
{struct car *car = params;struct ir_Data idata;/* 创建自己的队列 */QueueHandle_t xQueueIR = xQueueCreate(10,sizeof(struct ir_Data));/* 注册队列 */RegisterQueueHandle(xQueueIR);/* 初始化小车 */ShowCar(car);while(1){
// /* 读取按键值 */
// xQueueReceive(xQueueIR,&idata,portMAX_DELAY);// /* 控制汽车往右移动 */
// if(idata.data == car->control_key)
// {if(car->x < g_xres - CAR_LENGTH){/* 隐藏汽车 */HideCar(car);/* 调整位置 */car->x += 1 ;//每次按下右移5个单位if(car->x > g_xres - CAR_LENGTH)//超过屏幕分辨率(128)car->x = g_xres - CAR_LENGTH;//到达最大位置处/* 重新显示汽车 */ShowCar(car);vTaskDelay(50);if(car->x == g_xres - CAR_LENGTH){/* 汽车到达最右边 释放信号量 *///xSemaphoreGive(xSemTicks);/* 设置bit0 事件组 */xEventGroupSetBits(xEventCar,(1<<0));vTaskDelete(NULL);}}
// }}
}
实验现象:car1运行到终点后,car2、car3同时启动。
四、示例:等待一个任意事件
本节代码为:24_eventgroup_or,主要看nwatch\game2.c。
car1运行到终点后,会设置bit0事件;car2运行到终点后,会设置bit1事件;car3等待bit0、bit1的任意一个事件
car1运行到终点后,设置事件,代码如下:
car1运行到终点后,设置事件,代码如下:
void car1_task(void *params)
{struct car *car = params;struct ir_Data idata;/* 创建自己的队列 */QueueHandle_t xQueueIR = xQueueCreate(10,sizeof(struct ir_Data));/* 注册队列 */RegisterQueueHandle(xQueueIR);/* 初始化小车 */ShowCar(car);/* 获得信号量 *///xSemaphoreTake(xSemTicks,portMAX_DELAY);//car1获得信号量开始运行while(1){
// /* 读取按键值 */
// xQueueReceive(xQueueIR,&idata,portMAX_DELAY);// /* 控制汽车往右移动 */
// if(idata.data == car->control_key)
// {if(car->x < g_xres - CAR_LENGTH){/* 隐藏汽车 */HideCar(car);/* 调整位置 */car->x += 1 ;//每次按下右移5个单位if(car->x > g_xres - CAR_LENGTH)//超过屏幕分辨率(128)car->x = g_xres - CAR_LENGTH;//到达最大位置处/* 重新显示汽车 */ShowCar(car);vTaskDelay(50);//50ms后开始运行if(car->x == g_xres - CAR_LENGTH){/* 汽车到达最右边 释放信号量 *///xSemaphoreGive(xSemTicks);/* 设置bit0 事件组 */xEventGroupSetBits(xEventCar,(1<<0));vTaskDelete(NULL);}}
// }}
}car2等待事件,代码如下:
void car2_task(void *params)
{struct car *car = params;struct ir_Data idata;/* 创建自己的队列 */QueueHandle_t xQueueIR = xQueueCreate(10,sizeof(struct ir_Data));/* 注册队列 */RegisterQueueHandle(xQueueIR);/* 初始化小车 */ShowCar(car);/* 获得信号量 *///xSemaphoreTake(xSemTicks,portMAX_DELAY);/* 等待bit0事件 */
// xEventGroupWaitBits(xEventCar,(1<<0),pdTRUE,pdFALSE,portMAX_DELAY);while(1){
// /* 读取按键值 */
// xQueueReceive(xQueueIR,&idata,portMAX_DELAY);// /* 控制汽车往右移动 */
// if(idata.data == car->control_key)
// {if(car->x < g_xres - CAR_LENGTH){/* 隐藏汽车 */HideCar(car);/* 调整位置 */car->x += 1 ;//每次按下右移5个单位if(car->x > g_xres - CAR_LENGTH)//超过屏幕分辨率(128)car->x = g_xres - CAR_LENGTH;//到达最大位置处/* 重新显示汽车 */ShowCar(car);vTaskDelay(20);//20ms后开始运行//mdelay(50 );if(car->x == g_xres - CAR_LENGTH){/* 汽车到达最右边 释放信号量 *///xSemaphoreGive(xSemTicks);//car2没有获取信号量 所以当其运行完毕自杀后car1继续运行/* 设置bit1 事件组 */xEventGroupSetBits(xEventCar,(1<<1));vTaskDelete(NULL);}}
// }}
}
car3等待bit0、bit1事件,实验“或”的关系(倒数第2个参数),代码如下:
void car3_task(void *params)
{struct car *car = params;struct ir_Data idata;/* 创建自己的队列 */QueueHandle_t xQueueIR = xQueueCreate(10,sizeof(struct ir_Data));/* 注册队列 */RegisterQueueHandle(xQueueIR);/* 初始化小车 */ShowCar(car);/* 获得信号量 *///xSemaphoreTake(xSemTicks,portMAX_DELAY);/* 等待bit0 or bit1事件(or或者and取决于第四个参数 pdFLASE为or pdTRUE为and) *//* 若这里是or 当car1先到时释放事件bit0 此时car3等到事件组则开始运行 car2停止运行 直到car3运行完毕 才到car2继续运行 *//* 若这里是and 必须car1和car2运行完毕释放bit哦和bit1事件后car3才能运行 */xEventGroupWaitBits(xEventCar,(1<<0)|(1<<1),pdTRUE,pdTRUE,portMAX_DELAY);while(1){
// /* 读取按键值 */
// xQueueReceive(xQueueIR,&idata,portMAX_DELAY);// /* 控制汽车往右移动 */
// if(idata.data == car->control_key)
// {if(car->x < g_xres - CAR_LENGTH){/* 隐藏汽车 */HideCar(car);/* 调整位置 */car->x += 1 ;//每次按下右移5个单位if(car->x > g_xres - CAR_LENGTH)//超过屏幕分辨率(128)car->x = g_xres - CAR_LENGTH;//到达最大位置处/* 重新显示汽车 */ShowCar(car);//vTaskDelay(50);mdelay(50 );if(car->x == g_xres - CAR_LENGTH){/* 汽车到达最右边 释放信号量 *///xSemaphoreGive(xSemTicks);vTaskDelete(NULL);}}
// }}
}
五、示例: 等待多个事件都发生
本节代码为:25_eventgroup_and,主要看nwatch\game2.c。
使用遥控器控制car1、car2。car1运行到终点后,会设置bit0事件;car2运行到终点后,会设置bit1事件;car3等待bit0、bit1的所有事件
跟24_eventgroup_or相比,只是car3的代码发生了变化。car3等待bit0、bit1事件,实验“与”的关系(倒数第2个参数),代码如下:
225 /* 等待事件:bit0 or bit1 */
226 xEventGroupWaitBits(g_xEventCar, (1<<0)|(1<<1), pdTRUE, pdTRUE, portMAX_DELAY);
实验现象:实验遥控器的1、2控制car1、car2,它们都到达终点后,car3才会启动。
相关文章:
FrereRTOS事件组
文章目录 一、事件组概念与操作1、事件组的概念2、事件组的操作 二、事件组函数1、创建2、删除3、设置事件4、等待事件5、同步点 三、示例:广播四、示例:等待一个任意事件五、示例: 等待多个事件都发生 学校组织秋游,组长在等待: …...

【经典算法】BFS_最短路问题
目录 1. 最短路问题介绍2. 算法原理和代码实现(含题目链接)1926.迷宫中离入口最近的出口433.最小基因变化127.单词接龙675.为高尔夫比赛砍树 3. 算法总结 1. 最短路问题介绍 最短路径问题是图论中的一类十分重要的问题。本篇文章只介绍边权为1(或边权相同)的最简单的最短路径问…...

【题目/训练】:双指针
引言 我们已经在这篇博客【算法/学习】双指针-CSDN博客里面讲了双指针、二分等的相关知识。 现在我们来做一些训练吧 经典例题 1. 移动零 思路: 使用 0 当做这个中间点,把不等于 0(注意题目没说不能有负数)的放到中间点的左边,等于 0 的…...

LLVM - 编译器后端-指令选择
一:概述 任何后端的核心都是指令选择。LLVM 实现了几种方法;在本篇文章中,我们将通过选择有向无环图(DAG)和全局指令选择来实现指令选择。 在本篇文章中,我们将学习以下主题: • 定义调…...
ES+FileBeat+Kibana日志采集搭建体验
1.环境准备 需要linux操作系统,并安装了docker环境 此处使用虚拟机演示。(虚拟机和docker看参考我之前写的文章) VirtualBox安装Oracle Linux 7.9全流程-CSDN博客 VirtualBox上的Oracle Linux虚拟机安装Docker全流程-CSDN博客 简单演示搭建ES…...

Dockerfile常用指令详解
Dockerfile 是一个用于定义 Docker 镜像构建过程的脚本文件,其中包含了一系列指令,用于指定如何构建和配置镜像。以下是一些常用的 Dockerfile 指令及其示例用法: 1. FROM 指定基础镜像,Dockerfile 必须以该指令开始。 示例&am…...

【vue】浏览器兼容相关
Vue.js 是一个流行的前端 JavaScript 框架,它支持构建单页应用和复杂的用户界面。Vue.js 的核心库本身对浏览器的支持情况如下: Vue.js 2.x 最低支持版本:IE9 及以上版本。特性支持:ES5。兼容性:Vue 2.x 在发布时就考…...

【区块链+金融服务】基于区块链的区域股权金融综合服务平台 | FISCO BCOS应用案例
区域性股权市场是我国资本市场的重要组成部分,是多层次资本市场体系的基石。区块链技术与区域性股权市场 分散特征天然匹配,从新型金融基础设施层面为场外参与各方提供公共的可信服务,以技术手段完善市场基础条 件,弥补区域性短板…...

string字符串和json对象相互转换问题
//响应体String responseStr EntityUtils.toString(response.getEntity());log.debug("下单响应码:{},响应体:{}",statusCode,responseStr);if(statusCode HttpStatus.OK.value()){JSONObject jsonObject JSONObject.parseObject(responseStr);if(jsonObject.cont…...

【生成式人工智能-十一一个不修改模型就能加速语言模型生成的方法】
一个加速语言模型生成的方法 现在语言模型的一个弊端speculative decoding预言家预测的问题 speculative decoding 模块的实现方法NAT Non-autoregressive模型压缩使用搜索引擎 一些更复杂些的speculative decoding 实现方式 speculative decoding 是一个适用于目前生成模型的加…...

Rust 错误处理
Rust 错误处理 Rust 是一种系统编程语言,以其内存安全、高并发和实用性而著称。在 Rust 中,错误处理是一个核心概念,它通过提供 Result 和 Option 类型来鼓励开发者显式地处理可能出现的错误,而不是依赖异常机制。本文将深入探讨 Rust 中的错误处理机制,包括 Result 和 O…...

程序与进程 linux系统
程序与进程 程序 ( program ): 通常为 binary program ,放置在储存媒体中(如硬盘、光盘、软盘、磁带等), 为实体文件的型态存在;二进制文件,比如静态 /bin/date…...

使用MongoDB构建AI:Story Tools Studio将生成式AI引入Myth Maker AI游戏
Story Tools Studio利用先进的生成式AI技术,打造沉浸式、个性化、无穷尽的情景体验。 Story Tools Studio创始人兼首席执行官Roy Altman表示:“我们的旗舰游戏Myth Maker AI采用的是我们自主研发的、以AI为驱动的专家指导型故事生成器MUSE,它…...
)
鸿蒙UIAbility组件概述(二)
鸿蒙UIAbility组件概述 UIAbility组件基本用法指定UIAbility的启动页面获取UIAbility的上下文信息 UIAbility组件与UI的数据同步使用EventHub进行数据通信使用AppStorage/LocalStorage进行数据同步 UIAbility组件间交互(设备内)启动应用内的UIAbility启动…...
如何优化SQL查询?)
Oracle(70)如何优化SQL查询?
优化SQL查询是数据库管理的重要部分,旨在提高查询性能,减少响应时间和资源消耗。以下是一些常见的SQL查询优化技术,结合代码示例详细说明。 1. 使用索引 索引是优化查询性能的最常见方法之一。索引可以显著减少数据检索的时间。 示例 假设…...

深度剖析:Jenkins构建任务无法中断的原因及解决方案
个人名片 🎓作者简介:java领域优质创作者 🌐个人主页:码农阿豪 📞工作室:新空间代码工作室(提供各种软件服务) 💌个人邮箱:[2435024119qq.com] 📱…...

【YOLO】常用脚本
目录 VOC转YOLO划分训练集、测试集与验证集 VOC转YOLO import os import xml.etree.ElementTree as ETdef convert(size, box):dw 1. / size[0]dh 1. / size[1]x (box[0] box[1]) / 2.0y (box[2] box[3]) / 2.0w box[1] - box[0]h box[3] - box[2]x x * dww w * dwy…...

Springboot IOC DI理解及实现+JUnit的引入+参数配置
一、JavaConfig 我们通常使用 Spring 都会使用 XML 配置,随着功能以及业务逻辑的日益复杂,应用伴随着大量的 XML 配置文件以及复杂的 bean 依赖关系,使用起来很不方便。 在 Spring 3.0 开始,Spring 官方就已经开始推荐使用 Java…...

CeresPCL 最小二乘插值(曲线拟合)
一、简介 在多项式插值时,当数据点个数较多时,插值会导致多项式曲线阶数过高,带来不稳定因素。因此我们可以通过固定幂基函数的最高次数 m(m < n),来对我们要拟合的曲线进行降阶。之前的函数形式就可以变为: 既然是最小二乘问题,那么就仍然可以使用Ceres来进行求解。 …...

【TCP/IP】自定义应用层协议,常见端口号
互联网中,主流的是 TCP/IP 五层协议 5G/4G 上网,是有自己的协议栈,要比 TCP/IP 更复杂(能够把 TCP/IP 的一部分内容给包含进去了) 应用层 可以代表我们所编写的应用程序,只要应用程序里面用到了网络通信…...

Commit Mono版本管理指南:如何优雅地升级和回滚字体版本
Commit Mono版本管理指南:如何优雅地升级和回滚字体版本 【免费下载链接】commit-mono Commit Mono is an anonymous and neutral programming typeface. 项目地址: https://gitcode.com/gh_mirrors/co/commit-mono Commit Mono是一款匿名且中性的编程字体&a…...

基于Hi3861与WM8978的嵌入式智能录音笔设计与实现
1. 项目概述:当Hi3861遇见WM8978,一个录音笔的诞生最近在捣鼓Hi3861这块开发板,想用它做点有意思的东西。Hi3861是海思(现在叫海思了)推出的一款面向IoT领域的Wi-Fi SoC,性能对于简单的音频处理来说&#x…...

AArch64虚拟内存系统架构与地址转换详解
1. AArch64虚拟内存系统架构概述虚拟内存是现代计算机系统的核心机制,它通过地址转换技术将程序使用的虚拟地址(VA)映射到实际的物理地址(PA)。AArch64作为ARMv8-A和ARMv9-A架构的64位执行状态,其虚拟内存系统在设计上兼顾了灵活性和性能需求。在AArch64…...

告别数据壁垒:用ArcGIS Editor for OSM插件,5分钟搞定OSM数据下载与本地编辑
告别数据壁垒:用ArcGIS Editor for OSM插件,5分钟搞定OSM数据下载与本地编辑 在空间数据分析领域,OpenStreetMap(OSM)作为开放的全球地理数据库,已成为许多GIS从业者的重要数据来源。然而,传统O…...

挑选专业语音工具不会选?这5个实用标准帮到你
日常工作生活中,不少人会遇到会议纪要整理、课堂录音梳理、嘉宾访谈整理等场景,这类场景往往需要耗费大量时间抠语音内容,挑选语音转写工具时,也常面临准确率差、速度慢等问题,结合多款主流AI工具实测,整理…...
)
Perplexity健康科普查询深度拆解(临床医生都在用的7个隐藏技巧)
更多请点击: https://codechina.net 第一章:Perplexity健康科普查询的底层逻辑与临床价值 Perplexity 健康科普查询并非传统关键词匹配式搜索引擎,其核心依托于实时检索增强生成(RAG)架构与权威医学知识图谱的深度融合…...

完整 Ubuntu 服务器 XFCE 桌面 + XRDP 远程桌面 部署使用全流程
一、系统初始化 & 基础依赖安装bash# 更新系统sudo apt update && sudo apt upgrade -y# 安装必备依赖sudo apt install wget curl libfuse2 libxcb-xinput0 libxkbfile1 libssl-dev lrzsz -y二、安装 XFCE 轻量图形桌面bash# 完整安装XFCE桌面环境sudo apt instal…...

告别显示器!用VNC Viewer远程玩转树莓派4B的完整配置指南
无显示器玩转树莓派4B:VNC远程配置全攻略 当你刚拿到树莓派4B时,第一反应可能是找显示器、键盘鼠标来配置它。但现实情况往往是:手边没有多余的显示设备,或者你希望将树莓派作为服务器长期运行,根本不需要连接显示器。…...

CVAT管理员必看:用户权限、任务分割与Datumaro数据导入导出全流程详解
CVAT管理员实战指南:权限配置、任务优化与数据流转全解析 1. 权限管理的艺术:从基础配置到高级控制 在CVAT平台中,权限管理是确保数据安全与协作效率的核心机制。不同于普通标注员视角,管理员需要掌握三个关键权限层级:…...
 (H strain) ;CVVIVGRVVLSGLK)
HCV NS4A Protein (22-34) (H strain) ;CVVIVGRVVLSGLK
一、基础信息多肽名称:丙型肝炎病毒 NS4A 蛋白片段 (22-34) H 株英文:HCV NS4A Protein (22-34) (H strain)三字母序列:Cys-Val-Val-Ile-Val-Gly-Arg-Val-Val-Leu-Ser-Gly-Lys单字母序列:CVVIVGRVVLSGLK氨基酸数量:13 …...