用ChatGPT学习多传感器融合中的基础知识
困惑与解答:
问题:匈牙利算法中的增广矩阵路径是什么意思
解答:
匈牙利算法是解决二分图最大匹配的经典算法之一。其中的增广矩阵路径指的是在当前匹配下,从一个未匹配节点开始,沿着交替路(交替路是指依次经过未匹配点、已匹配点、未匹配点……的路径)不断寻找增广路(增广路是指起点和终点都是未匹配点的路),直到找到一条增广路为止。
在匈牙利算法中,通过搜索增广矩阵路径来更新匹配关系,每次找到一条增广路就可以将当前的匹配数加1,直至不存在增广路为止。因此,增广矩阵路径是匈牙利算法中非常重要的概念。
个人理解概述:
- 增广路径是从一个未匹配点开始,沿着路径(未匹配点与匹配点来回交替的路径),一直找到另一个未匹配点结束的路径。
问题:扩展卡尔曼滤波是非线性方程求解问题,是将非线性方程拟合为线性方程吗
解答:
扩展卡尔曼滤波(Extended Kalman Filter,EKF)是一种用于非线性系统状态估计的滤波算法,在某些情况下可以将非线性方程的求解问题转化为线性方程的求解问题。
具体来说,扩展卡尔曼滤波通过对非线性系统的状态方程和观测方程进行一阶泰勒展开,将非线性问题线性化。然后,根据线性化的模型设计卡尔曼滤波器,对系统的状态进行估计。在每个时间步骤中,扩展卡尔曼滤波都要预测下一个时刻的状态,并根据实际的测量结果进行修正预测值。由于扩展卡尔曼滤波是基于线性化模型进行求解的,因此其准确性和鲁棒性取决于线性化模型的正确性和精度。
总之,扩展卡尔曼滤波是一种将非线性问题线性化之后应用卡尔曼滤波来完成状态估计的方法。虽然EKF可以将原非线性问题转化为线性问题进行求解,但这并不等同于将非线性方程拟合为线性方程。在使用EKF时,仍需要考虑模型的精度和误差对滤波器性能的影响。
个人理解概述:
- 增广路径是从一个未匹配点开始,沿着路径(未匹配点与匹配点来回交替的路径),一直找到另一个未匹配点结束的路径。
问题:自动驾驶中用到的是扩展卡尔曼滤波还是无损卡尔曼滤波
解答:
在自动驾驶中,常常使用扩展卡尔曼滤波(Extended Kalman Filter,EKF)来实现对车辆状态的估计和预测。
EKF是一种针对非线性状态估计问题的滤波算法,可以将非线性系统状态方程和观测方程进行一阶泰勒展开,将非线性问题近似为线性问题,然后应用卡尔曼滤波来完成状态估计。在自动驾驶中,由于车辆的运动和环境变化都是非线性的,因此EKF被广泛应用于车辆状态的估计和预测,包括位置、速度、加速度以及车辆姿态等。
相比之下,无损卡尔曼滤波(Unscented Kalman Filter,UKF)则是另外一种针对非线性问题的卡尔曼滤波扩展形式。它通过使用称为“sigma点”的方法来捕捉非线性函数的统计特征,从而避免了在扩展卡尔曼滤波中需要进行一阶泰勒展开的缺陷。不过,在实际应用中,EKF通常被认为更加稳定可靠,更容易调整和优化。
因此,在自动驾驶中,一般使用扩展卡尔曼滤波来实现车辆状态的估计和预测。
个人理解概述:
问题:在多传感器融合中,如何设置激光雷达和毫米波的观测噪声模型
解答:
在多传感器融合中,激光雷达和毫米波雷达通常用于感知车辆周围的环境信息。为了实现精确的多传感器融合,需要对不同传感器的观测噪声进行建模。以下是在车辆自动驾驶应用场景中,如何设置激光雷达和毫米波雷达的观测噪声模型的一些常见方法:
激光雷达:激光雷达通常用于获取车辆周围的点云数据。对于激光雷达数据,通常采用高斯分布来建模其观测噪声,其均值为0,方差可以根据激光雷达的具体性能指标进行估计。例如,如果激光雷达的精度比较高,则可以将方差设置得比较小。
毫米波雷达:毫米波雷达通常用于感知车辆周围的物体的运动状态和位置信息。对于毫米波雷达数据,通常采用卡方分布来建模其观测噪声。卡方分布的自由度可以根据毫米波雷达的具体性能指标进行估计。例如,如果毫米波雷达的精度比较高,则可以将自由度设置得比较小。
总之,在实际应用中,需要根据不同传感器的具体性能指标进行观测噪声模型的建模。同时,为了更精确地估计传感器的观测噪声,还可以使用在线参数学习等方法来对观测噪声进行动态调整。
个人理解概述:
问题:什么是卡方分布
解答:
卡方分布是一种概率分布,通常用于统计学中的假设检验和置信区间。它是由皮尔逊在其研究 χ2χ^2χ2检验时引入的,因此称为卡方分布。卡方分布的形状取决于自由度参数,表示数据集中独立变量的数量。在实践中,卡方分布经常用于比较观察到的数据与期望的理论值之间的差异,以评估是否存在显著性。
个人理解概述:
问题:什么是非线性优化
解答:
非线性优化是数学中的一个分支,它涉及到在满足一定约束条件下,寻找函数最小值或最大值的问题。与线性优化不同的是,非线性优化中的目标函数和约束条件不再是线性的,而是可以是任意的非线性函数。
这种技术广泛应用于工程、经济学、物理学、金融学以及其他领域里的许多实际问题中。例如,在工程学中,非线性优化通常用于优化设计参数,以便最小化成本或最大化性能。在金融学中,它可以用于资产组合优化或风险管理等方面。
个人理解概述:
满足一定约束条件下,查找函数极值问题
问题:在自动驾驶的感知跟踪中,什么场景下需要用到非线性滤波来解决问题
解答:
在自动驾驶的感知跟踪中,如果被跟踪的物体的运动状态存在非线性关系或者传感器的噪声具有非线性特性,那么就需要使用非线性滤波算法来解决问题。
一些场景下可能需要用到非线性滤波算法,例如:
- 目标物体存在非线性运动模型:如果被跟踪的物体运动状态变化较为复杂,不能简单地用线性模型来描述其运动规律,这时可以考虑使用扩展卡尔曼滤波(EKF)或无迹卡尔曼滤波(UKF)等非线性滤波方法。
- 传感器输出存在非线性影响:如果使用的传感器本身存在非线性因素,例如相机畸变、雷达射线角度偏差等,这会导致测量数据出现非线性误差,这时也需要使用非线性滤波算法对数据进行处理。
总之,在自动驾驶的感知跟踪中,选择合适的滤波算法取决于具体的应用场景和要求。在实际应用中,需要根据系统的实际情况进行评估和选择。
个人理解概述:
问题:在自动驾驶中,为什么说车辆的运动和环境变化都是非线性的
解答:
在自动驾驶中,车辆的运动和环境变化都是非线性的。这主要是因为:
车辆运动具有非线性特性:车辆在实际行驶过程中,其运动状态会受到多种因素的影响,例如地面摩擦力、重心偏移、轮胎滑动等,这些因素都会导致车辆的运动状态出现非线性变化。
环境变化也具有非线性特性:在自动驾驶的场景下,车辆所处的环境可能会发生各种复杂的变化,例如天气变化、路况变化、其他车辆行驶状态的变化等,这些变化都会对车辆的感知和决策产生影响,同时也会对车辆的运动状态产生非线性影响。
基于以上原因,为了使自动驾驶系统准确地感知和预测车辆的运动状态和周围环境的变化,需要使用一些能够处理非线性问题的数学模型和算法。例如,可以使用扩展卡尔曼滤波(EKF)或无迹卡尔曼滤波(UKF)等非线性滤波算法来估计车辆的运动状态和环境变化,以便更好地实现自动驾驶。
个人理解概述:
问题:
解答:
个人理解概述:
问题:
解答:
个人理解概述:
问题:
解答:
个人理解概述:
问题:
解答:
个人理解概述:
相关文章:
用ChatGPT学习多传感器融合中的基础知识
困惑与解答: 问题:匈牙利算法中的增广矩阵路径是什么意思 解答: 匈牙利算法是解决二分图最大匹配的经典算法之一。其中的增广矩阵路径指的是在当前匹配下,从一个未匹配节点开始,沿着交替路(交替路是指依次…...

PyCharm2020介绍
PyCharm2020PyCharm2020安装过程PyCharm2020安装包1、PyCharm2020介绍2、PyCharm2020特点3、PyCharm2020特点4、PyCharm2020PyCharm2020安装过程 PyCharm2020安装过程安装步骤点击此链接。 PyCharm2020安装包 链接:https://pan.baidu.com/s/19R3nJx6wMyNBU9oY4N4n…...
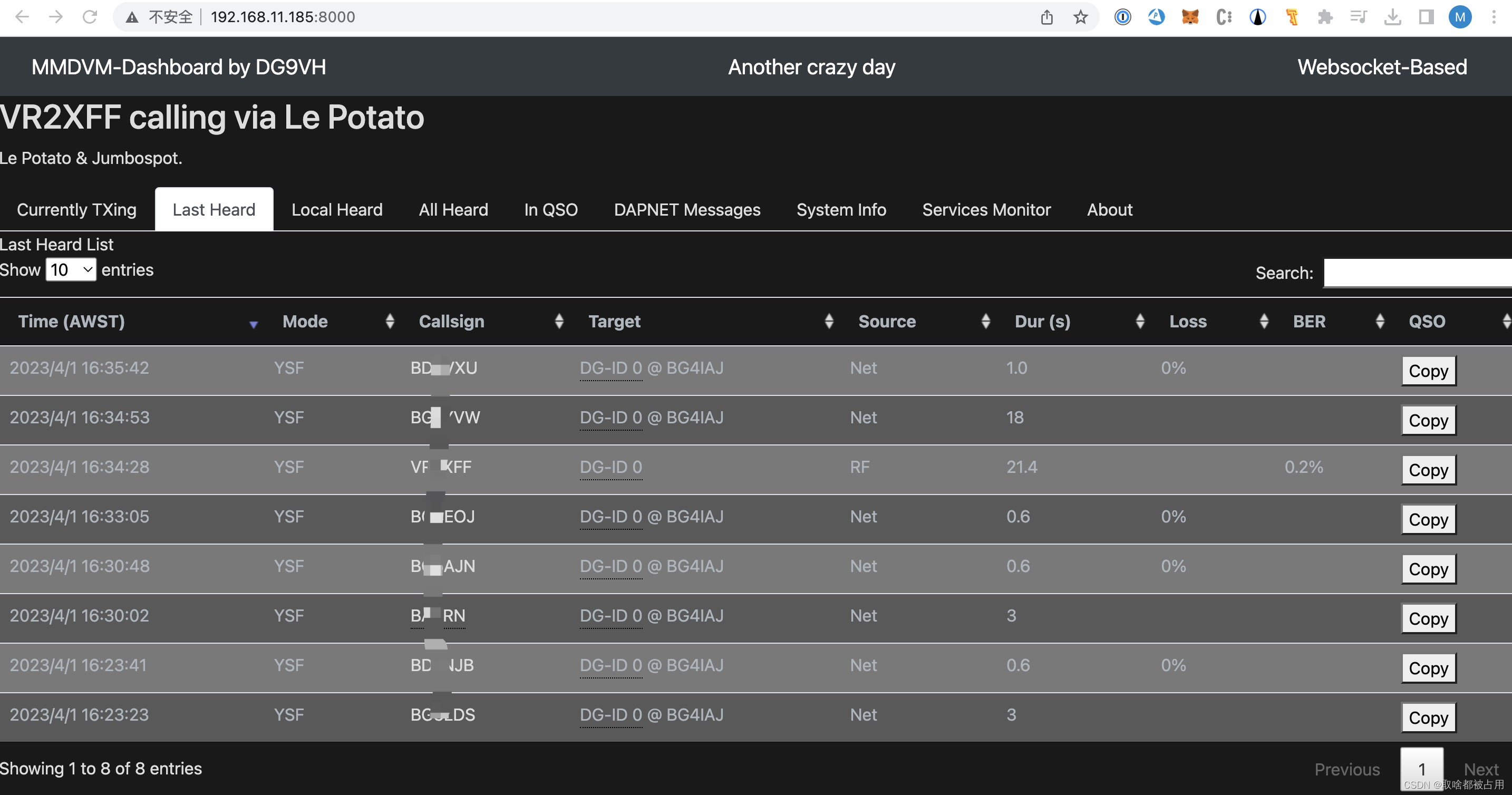
Le Potato + Jumbospot MMDVM热点盒子
最近才留意到,树莓派受到编程圈一定瞩目之后,智慧的同胞早已悄咪咪的搞了一堆xx派出来,本来对于香橙派,苹果派,土豆派和香蕉派是不感冒的,但是因为最近树莓派夸张的二级市场价格和断供,终于还是…...

蓝桥杯第19天(Python)(疯狂刷题第2天)
题型: 1.思维题/杂题:数学公式,分析题意,找规律 2.BFS/DFS:广搜(递归实现),深搜(deque实现) 3.简单数论:模,素数(只需要…...
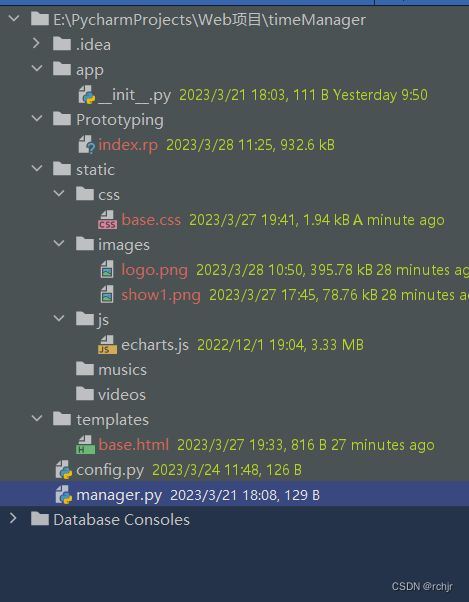
(五)手把手带你搭建精美简洁的个人时间管理网站—基于Axure的首页原型设计
🌟所属专栏:献给榕榕🐔作者简介:rchjr——五带信管菜只因一枚 😮前言:该专栏系为女友准备的,里面会不定时发一些讨好她的技术作品,感兴趣的小伙伴可以关注一下~👉文章简介…...

阿里面试:为什么MySQL不建议使用delete删除数据?
MySQL是一种关系型数据库管理系统,它的数据存储是基于磁盘上的文件系统实现的。MySQL将数据存储在表中,每个表由一系列的行和列组成。每一行表示一个记录,每一列表示一个字段。表的结构由其列名、数据类型、索引等信息组成。 MySQL的数据存储…...

低代码开发公司:用科技强力开启产业分工新时代!
实现办公自动化,是不少企业的共同追求。低代码开发公司会遵循时代发展规律,注入强劲的科技新生力量,在低代码开发市场厚积爆发、努力奋斗,推动企业数字化转型升级,为每一个企业的办公自动化升级创新贡献应有的力量。 一…...
)
参考mfa官方文档实践笔记(亲测)
按顺序执行以下指令: conda create -n aligner -c conda-forge montreal-forced-alignerconda config --add channels conda-forgeconda activate alignerconda install pytorch torchvision torchaudio pytorch-cuda11.7 -c pytorch -c nvidia 如果报错࿱…...

【 第六章 拦截器,注解配置springMVC,springMVC执行流程】
第六章 拦截器,注解配置springMVC,springMVC执行流程 1.拦截器: ①springMVC中的拦截器用于拦截控制器方法的执行。 ②springMVC的拦截器需要实现HandlerInterceptor或者继承HandlerInterceptorAdapter类。 ③springMVC的拦截器必须在spring…...
一种编译器视角下的python性能优化
“Life is short,You need python”!老码农很喜欢python的优雅,然而,在生产环境中,Python这样的没有优先考虑性能构建优化的动态语言特性可能是危险的,因此,流行的高性能库如TensorFlow 或PyTor…...

太逼真!这个韩国虚拟女团你追不追?
“她们看上去太像真人了”, 韩国虚拟女团MAVE的首支MV和打歌舞台引发网友阵阵惊呼。现在,她们的舞蹈已经有真人在挑战了。 这一组虚拟人的“逼真”倒不在脸,主要是MAVE女团的舞台动作接近自然,不放近景看,基本可以达到…...

安全与道路测试:自动驾驶系统安全性探究
随着自动驾驶技术的迅速发展,如何确保自动驾驶系统的安全性已成为业界关注的焦点。本文将探讨自动驾驶系统的潜在风险、安全设计原则和道路测试要求。 潜在风险 自动驾驶系统在改善交通安全和提高出行效率方面具有巨大潜力,但其安全性仍面临许多挑战&a…...

chatGPT学英语,真香!!!
文章目录学习目标学习内容目标方式过程学习时间学习产出学习目标 能够在三个月的练习后,和真人外教比较流畅的沟通! 最近chatGPT实在是太火了,各种事情都能干,能改论文、写代码和翻译。 看到B站很多教程教我们直接用chatGPT进行…...

12 Cache Memory
内存的层次结构 计算机内存的层级结构是一种将不同类型的存储设备按照速度、容量和访问时间组织起来的方式。这种层级结构提高了计算机的性能,使得处理器能够高效地访问数据。通常,内存层级结构可分为以下几个层次: 寄存器:寄存器…...
【CSS系列】第一章 · CSS基础
写在前面 Hello大家好, 我是【麟-小白】,一位软件工程专业的学生,喜好计算机知识。希望大家能够一起学习进步呀!本人是一名在读大学生,专业水平有限,如发现错误或不足之处,请多多指正࿰…...

【Java代码审计】表达式注入
1 前置知识 1.1 EL表达式 EL表达式主要功能: 获取数据:可以从JSP四大作用域中获取数据执行运算:执行一些关系运算,逻辑运算,算术运算获取web开发常用对象:通过内置 的11个隐式对象获取想要的数据调用jav…...
Python-GEE遥感云大数据分析、管理与可视化
Python-GEE遥感云大数据分析、管理与可视化近年来遥感技术得到了突飞猛进的发展,航天、航空、临近空间等多遥感平台不断增加,数据的空间、时间、光谱分辨率不断提高,数据量猛增,遥感数据已经越来越具有大数据特征。遥感大数据的出…...
 | 洛谷 P2731 [USACO3.3]骑马修栅栏 Riding the Fences)
信息学奥赛一本通 1375:骑马修栅栏(fence) | 洛谷 P2731 [USACO3.3]骑马修栅栏 Riding the Fences
【题目链接】 ybt 1375:骑马修栅栏(fence) 洛谷 P2731 [USACO3.3]骑马修栅栏 Riding the Fences 【题目考点】 1. 图论:欧拉回路 欧拉回路存在的条件:图中所有顶点的度都是偶数欧拉路径存在的条件:图中只有两个度为奇数的顶点…...
Spring Boot 应用的打包和发布
1. 创建项目(example-fast) 基于 Spring Boot 创建一个 WEB 项目 example-fast。 2. 编译打包 2.1 采用 IDEA 集成的 Maven 环境来对 Spring Boot 项目编译打包,可谓是超级 easy 2.2 mvn 命令打包 # mvn clean 清理编译 # install 打包 #…...

linux:iptables (3) 命令行操练(一)
目录 1.命令行手册查缺补漏 2.开始练习,从最陌生的参数练习开启 2.1 --list-rules -S :打印链或所有链中的规则 2.2 --zero -Z 链或所有链中的零计数器 2.3 --policy -P 修改默认链的默认规则 2.4 --new -N 接下来练习添加和删除自定义链 1.命令行手册查缺补…...

【网络编程】UDP协议
目录 协议格式 特点 1.无连接(Connectionless) 2. 不可靠(Unreliable) 3. 面向报文(Message-Oriented) 常见问题 协议格式 特点 1.无连接(Connectionless) 特点:在…...

物联网设备网络无缝切换与多网融合:exnetif模块实战指南
1. 项目概述:为什么我们需要exnetif? 在物联网项目的实际开发中,我遇到过太多因为网络环境不稳定而导致的“玄学”问题。比如,一个部署在工厂车间的智能网关,原本通过稳定的有线以太网连接云端,一旦生产线调…...
)
STM32驱动段码屏实战:手把手教你用HT1621B做个简易电子钟(附完整代码)
STM32与HT1621B打造高精度电子钟:从硬件连接到动态显示全解析 在嵌入式开发领域,能够将理论知识转化为实际项目的能力至关重要。本文将带您完成一个完整的电子钟项目,使用STM32微控制器和HT1621B驱动器来驱动段码液晶屏。不同于简单的驱动演示…...

百度网盘SVIP破解插件:macOS用户突破下载限速的终极指南
百度网盘SVIP破解插件:macOS用户突破下载限速的终极指南 【免费下载链接】BaiduNetdiskPlugin-macOS For macOS.百度网盘 破解SVIP、下载速度限制~ 项目地址: https://gitcode.com/gh_mirrors/ba/BaiduNetdiskPlugin-macOS 百度网盘SVIP破解插件(…...

二叉搜索树:高效查找与增删详解
引言在上一篇树结构开篇文章中,我们建立了树的基本概念、二叉树的定义和四种遍历方式。本文将继续深入,讲解二叉搜索树(Binary Search Tree,BST)——它是最基础的"有组织"二叉树,也是后续学习 AV…...

双机并联自适应虚拟阻抗下垂控制仿真模型附Simulink仿真
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、程序设计科研仿真。🍎完整代码获取 定制创新 论文复现点击:Matlab科研工作室👇 关注我领取海量matlab电子书和数学建模资料 dz…...

别再为WinPcap头疼了!手把手教你用SOEM 1.3.1在Windows上搞定EtherCAT主站开发环境
告别WinPcap困扰:SOEM 1.3.1在Windows下的EtherCAT主站开发全攻略 当第一次接触EtherCAT主站开发时,许多工程师都会遇到一个共同的"拦路虎"——WinPcap环境配置。这个看似简单的网络抓包工具,在实际开发中却可能耗费数小时甚至数天…...

同花顺高级玩法:用Python自动计算并更新‘历史换手衰减系数’,解放双手
同花顺量化实战:Python自动化计算历史换手衰减系数的完整方案 在量化交易领域,筹码分布分析一直是技术派投资者的重要工具。而同花顺软件中的"历史换手衰减系数"参数设置,直接影响着筹码峰分析的准确性。传统的手工计算方式不仅效率…...

开发者专属提示词库:提升AI协作效率的实战指南
1. 项目概述:一个为开发者量身定制的提示词宝库如果你是一名开发者,无论是前端、后端、运维还是算法工程师,我相信你都或多或少地接触过像 ChatGPT 这类大型语言模型。它们能写代码、解 Bug、解释概念,甚至帮你设计架构。但很多时…...

镜像空间全域透视,赋能多维场景一体化透明数智治理技术白皮书
镜像空间全域透视,赋能多维场景一体化透明数智治理技术白皮书副标题:聚合动态三维实时重构、无感厘米级定位、全域跨镜连续追踪、身体指纹生物核验四大自研核心,一站式覆盖楼宇、仓储、硐室全场景透明智能管控前言当下城市建筑楼宇、物资仓储…...