【Godot4.3】匀速和匀变速直线运动粒子
概述
本篇论述,如何用加速度在Godot中控制粒子运动。
匀速和匀变速直线运动的统一
以下是匀变速运动的速度和位移公式:
v t = v 0 + a t x t = v 0 t + 1 2 a t 2 v_t=v_0 + at \\ x_t=v_0t + \frac{1}{2}at^2 vt=v0+atxt=v0t+21at2
当a = 0 时:
v t = v 0 x t = v 0 t v_t=v_0 \\ x_t=v_0t vt=v0xt=v0t
所以匀速直线运动可以看成是a = 0 的特殊匀变速直线运动,两者可以共用一套公式。
Godot中的匀变速直线运动实现
另外,我们在Godot的_process()或者_physics_process()中得到的delta其实就是 Δ t \Delta t Δt,而不是一个连续累计的时间 t t t。
我们需要计算的当前帧基于前一帧的速度和位移,也就是:
v f r a m e = v f r a m e − 1 + a Δ t x f r a m e = v f r a m e − 1 Δ t + 1 2 a Δ t 2 v_{frame} = v_{frame-1} + a \Delta t \\ x_{frame} = v_{frame-1}\Delta t + \frac{1}{2} a {\Delta t}^2 vframe=vframe−1+aΔtxframe=vframe−1Δt+21aΔt2
其中:
- v f r a m e v_{frame} vframe表示当前帧的速度, v f r a m e − 1 v_{frame-1} vframe−1表示上一帧的速度
- x f r a m e x_{frame} xframe表示当前帧的位置, x f r a m e − 1 x_{frame-1} xframe−1表示上一帧的位置
其实也就是:
Δ v = v f r a m e − v f r a m e − 1 = a Δ t Δ x = x f r a m e − x f r a m e − 1 = v f r a m e − 1 Δ t + 1 2 a Δ t 2 \Delta v = v_{frame} - v_{frame-1} = a \Delta t \\ \Delta x = x_{frame} - x_{frame-1} = v_{frame-1}\Delta t + \frac{1}{2} a {\Delta t}^2 Δv=vframe−vframe−1=aΔtΔx=xframe−xframe−1=vframe−1Δt+21aΔt2
所以当前帧:
v f r a m e = v f r a m e − 1 + Δ v x f r a m e = x f r a m e − 1 + Δ x v_{frame} = v_{frame-1} + \Delta v \\ x_{frame} = x_{frame-1} + \Delta x vframe=vframe−1+Δvxframe=xframe−1+Δx
速度和位移都变成了基于前一帧的累计值,而与初始的速度 v 0 v_0 v0无关,同样加速度a = 0时, Δ v \Delta v Δv=0,当前帧速度保持不变, Δ x = v f r a m e − 1 Δ t \Delta x = v_{frame-1}\Delta t Δx=vframe−1Δt,当前帧的位置 = 上一帧位置 + Δ x \Delta x Δx。
实现粒子类
基于上面的认识,我们可以编写一个粒子类。它的代码如下,其中update()用于粒子基于_process()或者_physics_process()中得到的delta更新粒子速度和位置,是完全按照上面的思路实现的。
# 粒子
class Particle:var position:Vector2var velocity:Vector2var acceleration:Vector2func _init(position:Vector2,velocity:Vector2,acceleration:Vector2) -> void:self.position = positionself.velocity = velocityself.acceleration = acceleration# 更新速度和位置func update(d_t: float)-> void:var d_v = acceleration * d_tvelocity += d_vposition += velocity * d_t + (d_v * d_t)/2# 绘制粒子func draw_particle(canvas_item:CanvasItem,color:=Color.AQUAMARINE,r:=3.0,fill:=true,border_width:=1):canvas_item.draw_circle(position,r,color,fill,border_width)# 绘制粒子的速度矢量func draw_velocity(canvas_item:CanvasItem,color:=Color.GREEN_YELLOW,border_width:=1):canvas_item.draw_line(position,position+velocity,color,border_width)# 绘制粒子的加速度矢量func draw_acceleration(canvas_item:CanvasItem,color:=Color.ORANGE_RED,border_width:=1):canvas_item.draw_line(position,position+acceleration,color,border_width)
测试代码
extends Node2Dvar pos:Vector2 = Vector2(100,100) # 位置
var v := Vector2() # 速度
var a := Vector2.RIGHT * 20 # 加速度# 创建粒子实例
var p = Particle.new(pos,v,a)func _process(delta: float) -> void:p.update(delta) # 更新粒子的速度和位置queue_redraw() # 请求重绘# 绘制
func _draw() -> void:p.draw_particle(self) # 绘制粒子p.draw_velocity(self) # 绘制速度向量p.draw_acceleration(self) # 绘制加速度向量
可以看到:
- 我们在创建粒子实例时,只需要设定起始位置、初始速度以及加速度就可以了。
- 程序便会自动随时间更新粒子的速度和位置,并且绘制出粒子、粒子当前的速度以及加速度
通过设定不同的起始位置、初始速度以及加速度,我们就可以模拟出匀速直线运动、匀加速直线运动和匀减速直线运动。
# 匀减速直线运动
var pos:Vector2 = Vector2(100,100) # 起始位置
var v := Vector2.RIGHT * 100 # 初始速度
var a := Vector2.LEFT * 20 # 加速度
# 初速度为0的匀加速直线运动
var pos:Vector2 = Vector2(100,100) # 起始位置
var v := Vector2() # 初始速度
var a := Vector2.RIGHT * 20 # 加速度
# 初速度不为0的匀速直线运动
var pos:Vector2 = Vector2(100,100) # 起始位置
var v := Vector2.RIGHT * 100 # 初始速度
var a := Vector2() # 加速度
用曲线控制速度和加速度变化

extends Node2D# 匀减速直线运动
var pos:Vector2 = Vector2(300,300) # 起始位置
var v := Vector2.RIGHT * 100 # 初始速度
var a := Vector2.LEFT * 0 # 加速度@export var velocity_curve:Curve# 创建粒子实例
var p = Particle.new(pos,v,a)var offset:= 0.0
var step:=0.005func _process(delta: float) -> void:p.velocity = v * velocity_curve.sample(offset)offset += stepif not(offset <=1.0 and offset >= 0.0):step *= -1p.update(delta) # 更新粒子的速度和位置queue_redraw()# 绘制
func _draw() -> void:p.draw_particle(self,Color.AQUAMARINE,20.0) # 绘制粒子p.draw_velocity(self) # 绘制速度向量p.draw_acceleration(self) # 绘制加速度向量
效果:
相关文章:
【Godot4.3】匀速和匀变速直线运动粒子
概述 本篇论述,如何用加速度在Godot中控制粒子运动。 匀速和匀变速直线运动的统一 以下是匀变速运动的速度和位移公式: v t v 0 a t x t v 0 t 1 2 a t 2 v_tv_0 at \\ x_tv_0t \frac{1}{2}at^2 vtv0atxtv0t21at2 当a 0 时…...
基于Hive和Hadoop的用电量分析系统
本项目是一个基于大数据技术的用电量分析系统,旨在为用户提供全面的电力消耗信息和深入的用电量分析。系统采用 Hadoop 平台进行大规模数据存储和处理,利用 MapReduce 进行数据分析和处理,通过 Sqoop 实现数据的导入导出,以 Spark…...

一个简单的摄像头应用程序4
我们进一步完善了这个app01.py,我们优化了界面使其更人性化,下面介绍中包含了原有的功能及新增的功能: 创建和管理文件夹: create_folder 函数用于创建保存照片和视频的文件夹。 get_next_file_number 函数用于获取文件夹中下一个可用的文件编号。 图像处理: pil_to_cv 函…...
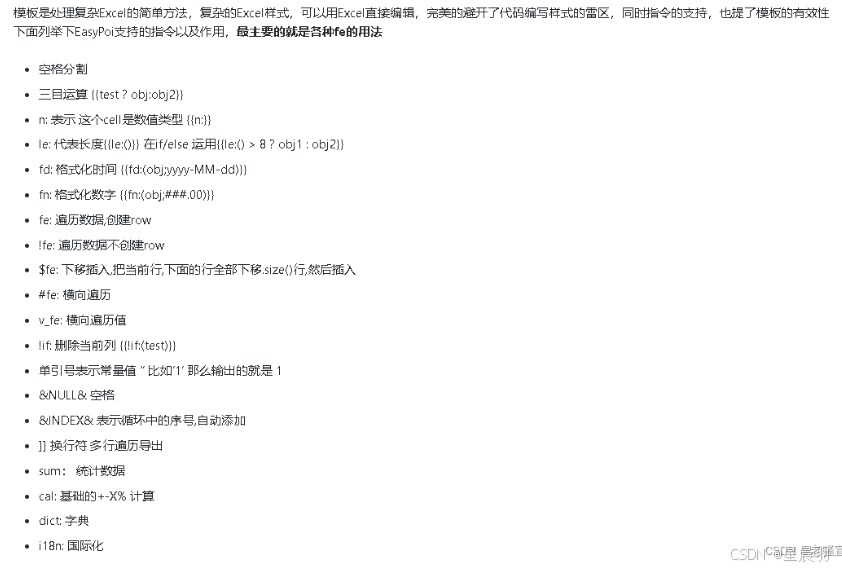
SpringBoot使用EasyPoi根据模板导出word or pdf
1、导出效果 1.1 wrod 1.2 pdf 2、依赖 <!--word--><dependency><groupId>cn.afterturn</groupId><artifactId>easypoi-base</artifactId><version>4.3.0</version></dependency><dependency><groupId>cn.…...
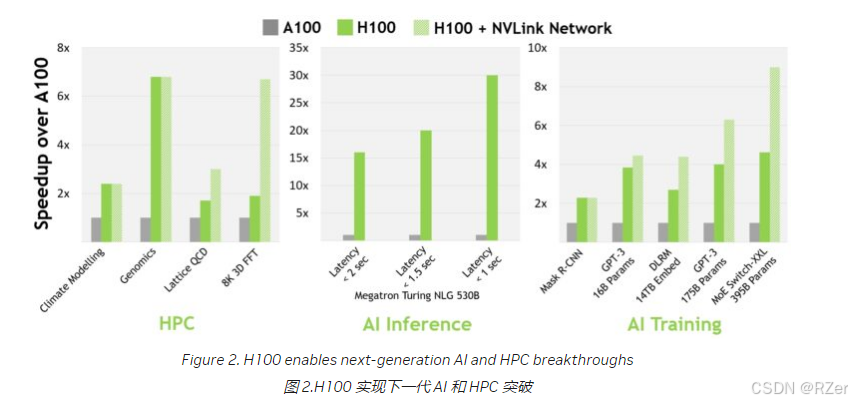
NVIDIA Hopper 架构深入
在 2022 年 NVIDIA GTC 主题演讲中,NVIDIA 首席执行官黄仁勋介绍了基于全新 NVIDIA Hopper GPU 架构的全新 NVIDIA H100 Tensor Core GPU。 文章目录 前言一、NVIDIA H100 Tensor Core GPU 简介二、NVIDIA H100 GPU 主要功能概述1. 新的流式多处理器 (SM) 具有许多性能和效率…...
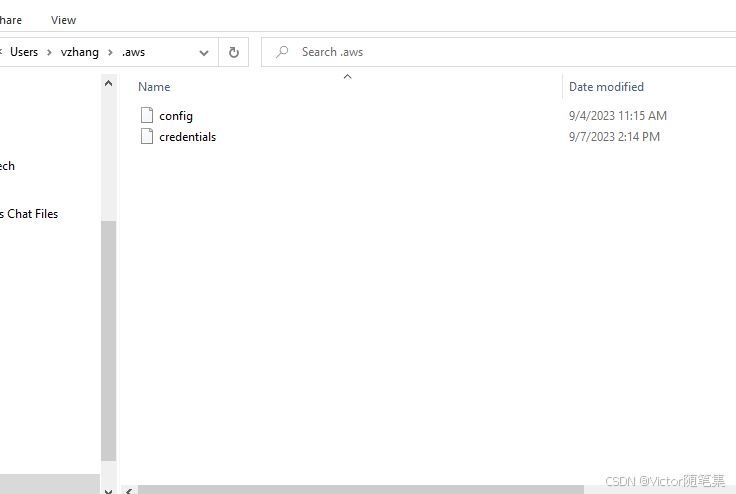
AWS IoT Core for Amazon Sidewalk
目录 1 前言2 AWS IoT2.1 准备条件2.2 创建Credentials2.2.1 创建user2.2.2 配置User 2.3 本地CLI配置Credentials 3 小结 1 前言 在测试Sidewalk时,device发送数据,网关接收到,网关通过网络发送给NS,而此处用到的NS是AWS IoT&am…...
今日指数项目项目集成RabbitMQ与CaffienCatch
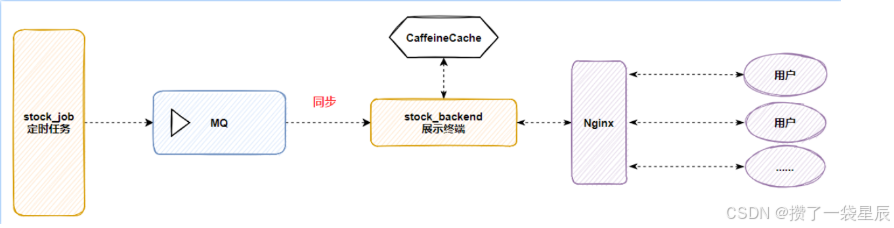
今日指数项目项目集成RabbitMQ与CaffienCatch 一. 为什么要集成RabbitMQ 首先CaffeineCatch 是作为一个本地缓存工具 使用CaffeineCatch 能够大大较少I/O开销 股票项目 主要分为两大工程 --> job工程(负责数据采集) , backend(负责业务处理) 由于股票的实时性也就是说 ,…...

C0005.Clion中移动ui文件到新目录后,报错问题的解决
报错问题如下 AutoUic error ------------- "SRC:/confirmwizardpage.cpp" includes the uic file "ui_confirmwizardpage.h", but the user interface file "confirmwizardpage.ui" could not be found in the following directories"SRC…...

基于STM32的智能家居灯光控制系统设计
引言 本项目将使用STM32微控制器实现一个智能家居灯光控制系统,能够通过按键、遥控器或无线模块远程控制家庭照明。该项目展示了如何结合STM32的外设功能,实现对灯光的智能化控制,提升家居生活的便利性和节能效果。 环境准备 1. 硬件设备 …...

06.useEffect
在 React 开发中,正确使用 useEffect 钩子对于优化组件性能至关重要。一个常见但容易被忽视的性能问题是在依赖数组中使用对象作为依赖项。这可能导致不必要的效果重新执行,从而影响应用性能。通过优先使用原始值(如字符串、数字)作为依赖项,我们可以显著提高组件的效率。…...

【设计模式-中介者模式】
定义 中介者模式(Mediator Pattern)是一种行为设计模式,通过引入一个中介者对象,来降低多个对象之间的直接交互,从而减少它们之间的耦合度。中介者充当不同对象之间的协调者,使得对象之间的通信变得简单且…...

树和二叉树知识点大全及相关题目练习【数据结构】
树和二叉树 要注意树和二叉树是两个完全不同的结构、概念,它们之间不存在包含之类的关系 树的定义 树(Tree)是n(n≥0)个结点的有限集,它或为空树(n 0);或为非空树&a…...

ajax的原理,使用场景以及如何实现
AJAX 原理 AJAX(Asynchronous JavaScript and XML)是一种在网页中实现异步通信的技术,允许网页在不重新加载整个页面的情况下与服务器交换数据。这使得网页应用可以更加响应式和动态,提升用户体验。 AJAX 的核心原理是在后台通过…...

lock_guard和unique_lock学习总结
1.std::lock_guard std::lock_guard其实就是简单的RAII(Resource Acquisition Is Initialization)封装,资源获取即初始化。在构造函数中进行加锁,析构函数中进行解锁,这样可以保证函数退出时,锁一定被释放…...
数据挖掘-padans初步使用
目录标题 Jupyter Notebook安装启动 Pandas快速入门查看数据验证数据建立索引数据选取⚠️注意:排序分组聚合数据转换增加列绘图line 或 **(默认):绘制折线图。bar:绘制条形图。barh:绘制水平条形图。hist&…...

小阿轩yx-案例:项目发布基础
小阿轩yx-案例:项目发布基础 前言 随着软件开发需求及复杂度的不断提高,团队开发成员之间如何更好地协同工作以确保软件开发的质量已经慢慢成为开发过程中不可回避的问题。Jenkins 自动化部署可以解决集成、测试、部署等重复性的工作,工具集…...
【HarmonyOS】时间处理Dayjs
背景 在项目中经常会使用要时间的格式转换,比如数据库返回一个Date数据,你需要转成2024-10-2的格式,鸿蒙的原生SDK中是没有办法实现的,因此,在这里介绍第三方封装好并且成熟使用的库Dayjs。 安装 切换到Entry文件夹下…...

论React Native 和 UniApp 的区别
1. 开发语言与框架 React Native: 使用 JavaScript 和 React 框架进行开发。采用了 React 的组件化开发模式,适合熟悉 React 生态的开发者。使用 JavaScript 编写的代码会通过 React Native 框架桥接到原生代码(如 iOS 的 Swift 或 Android 的 Java/Kotl…...
微信小程序处理交易投诉管理,支持多小程序
大家好,我是小悟 1、问题背景 玩过微信小程序生态的,或许就有这种感受,如果收到投诉单,不会及时通知到手机端,而是每天早上10:00向小程序的管理员及运营者推送通知。通知内容为截至前一天24时该小程序账号内待处理的交…...
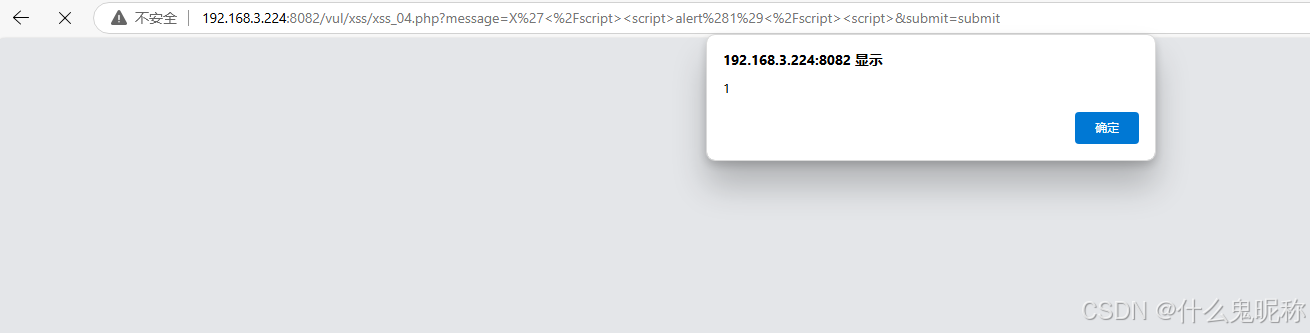
Pikachu-xss防范措施 - href输出 js输出
总体原则: 输入做过滤,输出做转义 过滤:根据业务需要进行过滤,如:输入点要求输入手机号,则只允许输入手机号格式的数字; 转义:所有输出到前端的数据,都根据输出点进行转…...

SSHFS-Win:如何让Windows像访问本地硬盘一样操作远程Linux文件
SSHFS-Win:如何让Windows像访问本地硬盘一样操作远程Linux文件 【免费下载链接】sshfs-win SSHFS For Windows 项目地址: https://gitcode.com/gh_mirrors/ss/sshfs-win 对于需要在Windows环境下工作的开发者来说,最头疼的问题之一就是如何高效访…...

智读致用|《谷歌亚马逊如何做产品》6|赢在数据驱动:抓住核心指标,就能让产品“开口说话”
核心问题:产品发布后,怎么判断它到底成没成功?团队争论需求优先级时,凭什么说“这个比那个重要”? 上一篇文章解决了“产品能不能用”,现在要回答更根本的问题:它值不值得继续投入? …...

Agent_Skills_万千应用_第01篇_PDF 处理 Skill:让 Agent 真正会读、会拆、会抽取 PDF
Agent Skills 万千应用 第01篇 PDF 处理 Skill:让 Agent 真正会读、会拆、会抽取 PDF 01|场景痛点开场:PDF 是办公室里最像“黑盒”的文件 你一定遇到过这种场景:老板丢来一份 80 页行业报告,让你 10 分钟内说清楚“…...

【Midjourney双色调风格终极指南】:20年视觉算法专家亲授3步精准复刻电影级Duotone效果
更多请点击: https://kaifayun.com 第一章:双色调美学的视觉起源与Midjourney适配性解析 双色调(Duotone)并非现代数字设计的发明,其视觉基因可追溯至19世纪的凹版印刷工艺——通过两块独立印版叠加单色油墨…...

第一篇:Claude Code 是什么?——为终端而生的Agentic编程助手
📌 标签:#概念解析 #Agent #终端工具 #入门必读你即将认识的,不是又一个“聊天式代码生成器”,而是一个真正能在终端里自主完成开发任务的 AI 工程师。1. 从“副驾驶”到“领航员”的跨越 如果你用过 GitHub Copilot、Cursor 或 C…...
上安装 WinQSB——无需虚拟机)
Windows 10/11(64位)上安装 WinQSB——无需虚拟机
以下是在 Windows 10/11(64位) 上安装 WinQSB 的完整步骤,无需虚拟机,并安装在 D 盘。原理说明 WinQSB 是一个 16位 Windows 程序,64位 Windows 原生不支持运行它。解决方案是使用 winevdm(otvdm࿰…...

FModel完整指南:解锁虚幻引擎游戏资源的终极工具
FModel完整指南:解锁虚幻引擎游戏资源的终极工具 【免费下载链接】FModel Unreal Engine Archives Explorer 项目地址: https://gitcode.com/gh_mirrors/fm/FModel 你是否曾好奇《堡垒之夜》中的炫酷皮肤是如何制作的?或者想提取《Valorant》中的…...

中兴光猫终极破解指南:3步解锁永久Telnet访问权限
中兴光猫终极破解指南:3步解锁永久Telnet访问权限 【免费下载链接】zteOnu A tool that can open ZTE onu device factory mode 项目地址: https://gitcode.com/gh_mirrors/zt/zteOnu 您是否曾经因为中兴光猫的高级功能被限制而感到困扰?无法配置…...

3分钟搞定B站评论分析:这个开源工具让你秒懂评论区用户身份
3分钟搞定B站评论分析:这个开源工具让你秒懂评论区用户身份 【免费下载链接】bilibili-comment-checker B站评论区自动标注成分,支持动态和关注识别以及手动输入 UID 识别 项目地址: https://gitcode.com/gh_mirrors/bil/bilibili-comment-checker …...
)
Zabbix 7.0 在 Ubuntu 上启用中文界面语言(zh_CN)
Zabbix 7.0 配置中文选项(zh_CN) 适用于 Zabbix 7.0 系统默认情况下语言文件不包含中文的情况。环境说明 Zabbix 版本:7.0.15(LTS)问题现象 Language 下拉框中 Chinese (zh_CN) 是灰色不可选;原因是系统未安…...