OpenVINO基本操作流程
环境配置:

conda env list:可以查看有哪些环境

conda activate intel:启动某个环境
pip list:可以查看此环境下都下载了哪些软件包

from openvino.inference_engine import IEcore#从OpenVINO推理引擎中导入IECore类
import numpy as np
import cv2'''
1,初始化推理引擎
'''
ie = IECore()#创建一个IECore对象
for device in ie.available_devices:#遍历所有可用openVINO的计算机设备print(device)#打印每一个设备的名称with open('imagenet_classes.txt') as f:#打开一个包含ImageNet类标签的文件,读取里面的每一行信息labels = [line.strip() for line in f.readlines()]#读取文件中的所有行并去除每行的空格
#readlines()可以把文件里的每一行信息保存在列表中,但是也会把换行符保存进去
#line.strip()可以去掉换行符
#最后把每一行信息都保存在labels(每一行是一个元素,100行则在labels列表中有100个元素)'''
2,加载模型
'''
model_xml = "resnet18.xml"#指定模型的XML文件路径
model_bin = "resnet18.bin"#指定模型的二进制权重文件路径
#xml指明了这个模型中的层和参数,相当于搭了一个框架。而bin就是框架里的信息
#pytorch训练出来的是.pt文件,后续会通过程序先将.pt文件转为onnx,然后再转为.xml,.bin文件net = ie.read_network(model=model_xml, weights=model_bin)#读取模型'''
3,配置输入输出
'''
input_blob = next(iter(net.input_info))#获取模型输入层名称并保存在input_blob中
out_blob = next(iter(net.outputs))#获取模型的输出层名称n,c,h,w = net.input_info[input_blob].input_data.shape#获取输入数据的形状
#n表示一个批次传入图片数量,c代表通道数
#通过print可以看出如果我们想要把图片传入到resnet18这个网络中,1次只能传一张,通道数为3(彩色)
#传入图片高宽需要是h w
print(n, c, h, w)#为了匹配上述模型输入图片要求,就有了下面的对图片的处理
src = cv2.imread("1.jpg")#读取图片文件
image = cv2.resize(src, (w,h))#调整图片大小以匹配模型的输入大小
image = np.float32(image)/255.0$将图像数据归一化到[0,1]范围
#np.float32(image)将图片每一个像素值转换为浮点型,然后每个都除以255
image[:,:,] -= (np.float32(0.485), np.float32(0.456), np.float(0.406))#从图像中减去均值
image[:,:,] -= (np.float32(0.229), np.float32(0.224), np.float(0.225))#将图像数据除以标准#
#差
#image[:,:,]读取每一个像素值
image = image.transpose(2, 0, 1)#调整图像的维度顺序,将cv2读取的BGR(012)格式转换为RBG(2,0,1)exec_net = ie.load_network(network = net, device_name = "CPU")#在CPU上加载模型
res = exec_net.infer(inputs={input_blob:[image]})#进行推断'''
后处理
'''
res = res[out_blob]#获取推断结果
print(res.shape)#打印推断结果的形状.因为分类给的txt中有1000行,即1000个可能。所以输出的res有#1000个概率,我们只需要找到概率最大的那个即可
label_index = np.argmax(res, 1)[0]#获取最可能的类标签的索引
print(label_index, label[label_index])#打印类标签的索引和名称
cv2.putText(src, labels[label_index],(50,50),cv2.FONT_HERSHEY_SIMPLEX,1.0,(0,0,255),2,8)
#在原图上添加类标签文本
cv2.imshow("image classification", src)
cv2.waitKey(0)图像分类案例
1,模型训练
使用OpenVINO进行实时图像分类,使用Pytorch训练一个自己的图形分类模型,然后将它部署在树莓派上,并用摄像头进行
训练自己的图形分类模型首先创建文件夹,文件夹内有自己的数据集文件夹(可以命名为Data),Data文件夹中又有text和train文件夹,分别存放要训练的图片。除了数据集文件夹剩下的就是.py代码文件

训练模型.py
import os #os通常用来创建文件夹,遍历目录等更系统有关
import torch
import torch.nn as nn #nn用来修改网络参数
import torch.optim as optim #optim用来网络优化系统的
from torchvision import datasets, models, transforms
#datasets读取自定义数据,models用来导入预训练模型的,transforms用来数据增强等预处理if __name__ == '__main__': #定义主函数#设置设备。判断当前显卡cuda能否使用,不能使用则使用cpudevice = torch.device("cuda" if torch.cuda.is_available() else "cpu")#数据增强和归一化操作data_transforms = {'train':transforms.Compose(transforms.RandomResizedCrop(224), #对图片进行随机裁剪大小为224*224的大小transforms.RandomHorizontalFlip(), #随机对图片进行一个水平翻转transforms.ToTensor(), #把图片转变为tensor格式才能输入到网络中transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])#对图片数据进行归一化,前面为均值,后面是标准差]),'test':transforms.Compose([transforms.Resize(256),transforms.CenterCrop(224),transforms.ToTensor(),transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])]),}#加载数据集data_dir = r'data'#相对路径的写法,表示数据集在此.py文件同目录下的data文件中image_datasets = {x:datasets.ImageFolder(os.path.join(data_dir, x),data_transforms[x])for x in ['train', 'test']}#os.path.join(data_dir,x)表示路径拼接将数据增强后的图片存入到data_dir中,data_dir称为根目 #录,x来自train或者test#此操作表示如果数据来自train则进行数据增强train里的方式,如果来自test则进行test的增强方式dataloaders = {x:torch.utils.data.DataLoader(image_datasets[x], batch_size=16,shuffle=True, num_workers=4)for x in ['train', 'test']}#dataloaders将图片传入到训练网络中,分批次传。batch_size表示一批传几张图片,shuffle表示每 #次传入数据前进行打乱。num_works表示用几个线程进行加载dataset_sizes = {x: len(image_datasets[x]) for x in ['train', 'test']}#dataset_sizes获取train,test中有多少张图片class_names = image_datasets['train'].classes#class_names获取每一个类别对应的名字 #加载预训练的ResNet18模型model = models.resnet18(pretrained = True)#用models获取预训练模型,pretrained=True表示拿到ResNet18框架之外,还把权重文件里面的数据也 #拿下来。在上述OpenVINO实例中我们知道ResNet18数据集有1000中,而这里我们的数据集只有cat和 #dog,所以输出是不一样的,所以我们要将输出的数量换为我们的数量,以下两行为替换方法num_ftrs = model.fc.in_featuresmodel.fc = nn.Linear(num_ftrs, len(class_names))#网络弄好了,通过下方一行代码转到设备里面进行运行model = model.to(device)criterion = nn.CrossEntropyLoss()#训练网络时用到的损失函数,分类问题用此损失函数即可optimizer = optim.Adam(model.parameters(), lr=0.001)#Adam优化器,要优化参数model.parameters()表示models的全部参数,lr表示学习率best_acc = 0.0#初始化最高准确率best_epoch = -1#初始化best_model_wts = None#训练模型num_epochs = 25 #训练轮数for epoch in range(num_epochs):#首先输出当前是第几轮print(f'Epoch {epoch}/{num_epochs - 1}')print('-' * 10)#如果当前过程是train则进入训练模式model.train(),否则进入到model.eval()验证模式for phase in ['train', 'test']:if phase == 'train':model.train()else:model.eval()#初始化running_loss = 0.0running_corrects = 0#读取dataloaders里面的参数for inputs, labels in dataloaders[phase]:inputs = inputs.to(device)labels = labels.to(device)#每一个迭代开始之前都对梯度计算进行清零 optimizer.zero_grad()#如果是在训练阶段就打开计算梯度的工具with torch.set_grad_enabled(phase == 'train'):outputs = model(inputs)_,preds = torch.max(outputs, 1)#找到最大值并返回结果loss = criterion(outputs, labels)if phase == 'train':loss.backward()#如果是在训练阶段就进行反向传播optimizer.step()#并且更新优化器running_loss += loss.item() * inputs.size(0)#把loss值累加running_corrects += torch.sum(preds == labels.data)#统计正确个数#每一轮结束就统计一下loss值和正确率epoch_loss = running_loss / dataset_sizes[phase]epoch_acc = running_corrects.double() / dataset_sizes[phase]#并显示print(f'{phase} Loss: {epoch_loss:.4f} Acc: {epoch_acc:.4f}')#如果本轮正确率比以往的都高,则进行替换if phase == 'test' and epoch_acc >best_acc:best_acc = epoch_accbest_epoch = epochbest_model_wts = model.state_dict()print()print('Training complete!')print(f'Best test accuracy: {best_acc:.4f} at epoch {best_epoch}')torch.save(best_model_wts, f'models/best_resnet18_model_epoch_{best_epoch}.pth')使用预训练的ResNet18对图片进行训练,并且将性能最好的权重保存在本地。如下文件

2,模型转换
先转到onnx,再转到openvino
pytorch转onnx.py
import torch
import torchvision.models as models#指定要加载的模型权重文件的路径
model_weights_path = 'models/best_resnet18_model_epoch_17.pth'#加载ResNet-18模型结构
model = models.resnet18()
model.fc = torch.nn.Linear(model.fc.in_features, 2)
#从文件中加载模型权重
model.load_state_dict(torch.load(model_weights_path))#确保模型处于评估模式,关闭Dropout和BatchNorm层
model.eval()#创建一个模拟输入,以便ONNX导出器能够确定输入/输出格式
#这个例子假设输入图像是224X224的三通道图像
x = torch.randn(1, 3, 224, 224, requires_grad = True)#指定ONNX文件的输出路径
onnx_file_path = r'model\resnet18_catdog.onnx'#将模型导出为ONNX格式
torch.onnx.export(model, #运行的模型x, #模型输入(或者一个元组,如果有多个输入)onnx_file_path,#保存模型的文件路径export_params=True,#存储训练权重和偏置opset_version=10,#ONNX版本do_constant_folding=True#是否执行常量折叠优化)
print(f'Model saved in {onnx_file_path}')netron工具可以查看onnx里的参数 ,如下

onnx转OpenVINO
先安装onnx :pip install onnx==1.14.0
再用以下命令进行转换:mo --input_model .\resnet18_catdog.onnx
转换完成的文件路径会给标明(.bin .xml .mapping)

3,模型应用:单张图片分类
from openvino.inference_engine import IEcore
import numpy as np
import cv2ie = IECore()#创建一个IECore对象
for device in ie.available_devices:print(device)#animal.txt里面存放着分类类别名,一行为一种,此示例为分类cat和dog,所以此文件一共两行
#自己编写,并放在这些.py文件的同一目录下
with open('animal_classes.txt') as f:labels = [line.strip() for line in f.readlines()]#之前文件未写r,是由于resnet.xml和resnet.bin就在当前目录下,这里用r并加上路径名来指定#resnet18_catdog.xml文件(因为此xml文件不直接在该目录下,而在该目录的文件夹中)
model_xml = r"models/resnet18_catdog.xml"
model_bin = r"models/resnet18_catdog.bin"net = ie.read_network(model=model_xml, weights=model_bin)#读取模型input_blob = next(iter(net.input_info))#获取模型输入层名称并保存在input_blob中
out_blob = next(iter(net.outputs))#获取模型的输出层名称n,c,h,w = net.input_info[input_blob].input_data.shape
print(n, c, h, w)src = cv2.imread(r"resources/85.jpg")#读取图片文件
image = cv2.resize(src, (w,h))#调整图片大小以匹配模型的输入大小
image = np.float32(image)/255.0$将图像数据归一化到[0,1]范围
image[:,:,] -= (np.float32(0.485), np.float32(0.456), np.float(0.406))#从图像中减去均值
image[:,:,] -= (np.float32(0.229), np.float32(0.224), np.float(0.225))#将图像数据除以标准#
#差
#image[:,:,]读取每一个像素值
image = image.transpose(2, 0, 1)#调整图像的维度顺序,将cv2读取的BGR(012)格式转换为RBG(2,0,1)exec_net = ie.load_network(network = net, device_name = "CPU")#在CPU上加载模型
res = exec_net.infer(inputs={input_blob:[image]})#进行推断res = res[out_blob]
print(res.shape)
label_index = np.argmax(res, 1)[0]
print(label_index, label[label_index])
cv2.putText(src, labels[label_index],(50,50),cv2.FONT_HERSHEY_SIMPLEX,1.0,(0,0,255),2,8)
cv2.imshow("image classification", src)
cv2.waitKey(0)4,摄像头实时分类
摄像头实时分类.py
from openvino.inference_engine import IEcore
import numpy as np
import cv2
import time #导入time库以计算FPSie = IECore()#创建一个IECore对象
for device in ie.available_devices:print(device)with open('animal_classes.txt') as f:labels = [line.strip() for line in f.readlines()]model_xml = r"models/resnet18_catdog.xml"
model_bin = r"models/resnet18_catdog.bin"net = ie.read_network(model=model_xml, weights=model_bin)#读取模型input_blob = next(iter(net.input_info))#获取模型输入层名称并保存在input_blob中
out_blob = next(iter(net.outputs))#获取模型的输出层名称n,c,h,w = net.input_info[input_blob].input_data.shapeexec_net = ie.load_network(network = net, device_name = "CPU")#在CPU上加载模型cap = cv2.VideoCapture(0)
if not cap.isOpened():print("Error")exit()prev_time = time.time() #在循环开始前初始化时间变量
frame_count = 0
fps = 0 #初始化fpswhile True:ret, frame = cap.read()if not ret:print("Failed to grab frame.")breakframe_count +=1curr_time = time.time()delta_time = curr_time - prev_timeif delta_time >= 1.0: #每秒更新一次FPSfps = frame_count / delta_timeframe_count = 0prev_time = curr_timeimage = cv2.resize(src, (w,h))image = np.float32(image)/255.0image[:,:,] -= (np.float32(0.485), np.float32(0.456), np.float(0.406))image[:,:,] -= (np.float32(0.229), np.float32(0.224), np.float(0.225))image = image.transpose(2, 0, 1)res = exec_net.infer(inputs={input_blob:[image]})#进行推断res = res[out_blob]print(res.shape)label_index = np.argmax(res, 1)[0]print(label_index, label[label_index])cv2.putText(frame, {fps:.2f},(50,100),cv2.FONT_HERSHEY_SIMPLEX,1.0,(0,0,255),2,8)cv2.putText(frame, labels[label_index],(50,50),cv2.FONT_HERSHEY_SIMPLEX,1.0,(0,0,255),2,8)cv2.imshow("image classification", src)if cv2.waitKey(1) & 0xFF == ord('q'):break
cap.release()
cv2.destroyAllWindows()5,模型加速 (异步加速)
摄像头实时分类_异步加速.py
from openvino.inference_engine import IEcore
import numpy as np
import cv2
import time #导入time库以计算FPSie = IECore()#创建一个IECore对象
for device in ie.available_devices:print(device)with open('animal_classes.txt') as f:labels = [line.strip() for line in f.readlines()]model_xml = r"models/resnet18_catdog.xml"
model_bin = r"models/resnet18_catdog.bin"net = ie.read_network(model=model_xml, weights=model_bin)#读取模型input_blob = next(iter(net.input_info))#获取模型输入层名称并保存在input_blob中
out_blob = next(iter(net.outputs))#获取模型的输出层名称n,c,h,w = net.input_info[input_blob].input_data.shapeexec_net = ie.load_network(network = net, device_name = "CPU")#在CPU上加载模型cap = cv2.VideoCapture(0)
if not cap.isOpened():print("Error")exit()prev_time = time.time() #在循环开始前初始化时间变量
frame_count = 0
fps = 0 #初始化fpsrequest_id = 0 #不同点
while True:ret, frame = cap.read()if not ret:print("Failed to grab frame.")breakframe_count +=1curr_time = time.time()delta_time = curr_time - prev_timeif delta_time >= 1.0: #每秒更新一次FPSfps = frame_count / delta_timeframe_count = 0prev_time = curr_timeimage = cv2.resize(src, (w,h))image = np.float32(image)/255.0image[:,:,] -= (np.float32(0.485), np.float32(0.456), np.float(0.406))image[:,:,] -= (np.float32(0.229), np.float32(0.224), np.float(0.225))image = image.transpose(2, 0, 1)exec_net.start_async(request_id=request_id, inputs={input_blob:[image]})#不同点if exec_net.requests[request_id].wait(-1) == 0:res = exec_net.requests[request_id].outputs[out_blob]label_index = np.argmax(res, 1)[0]cv2.putText(frame, {fps:.2f},(50,100),cv2.FONT_HERSHEY_SIMPLEX,1.0,(0,0,255),2,8)cv2.putText(frame, labels[label_index],(50,50),cv2.FONT_HERSHEY_SIMPLEX,1.0,(0,0,255),2,8)cv2.imshow("image classification", src)if cv2.waitKey(1) & 0xFF == ord('q'):break
cap.release()
cv2.destroyAllWindows()6,如果用神经加速棒

6,树莓派部署
环境配置




目标检测案例
1,准备数据集
先使用labelimg标注信息,

打开labelimg后选择Open Dir打开要标注的数据集文件夹
选择完成后,再点击Change Save Dir来选择一个文件夹保存标注完成保存到的文件夹

一般设一个文件夹,文件夹内有images和labels文件夹,labels文件夹用来保存标注后图片,images文件夹用来保存需要标注的图片。并且labels文件夹和images文件夹下都有train和test文件夹分别用来保存要训练的图片和测试的图片
注意,labels/train文件下必须要有一个名为classes.txt的文本文件,里面记录着标签名(要检测火则写为fire)
标注时记得打开自动保存

2,准备YOLOv5代码
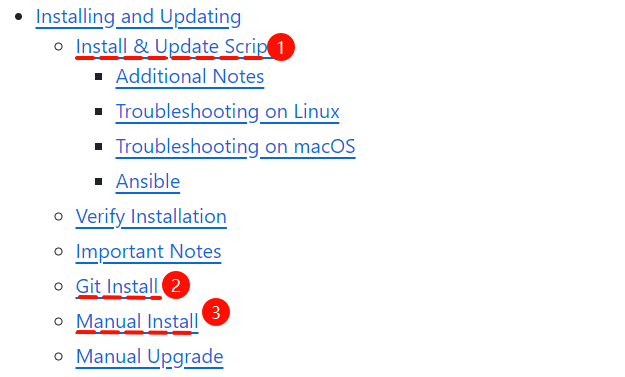
下载代码的过程推荐网址:YOLOv5-6.1从训练到部署(一):环境安装、示例检测、推理文件的导出与可视化_yolov5 6.1-CSDN博客
将代码文件和数据集文件放到同一目录下

配置完成后,在终端运行 python detect.py --weights yolov5s.pt --conf-thres 0.4
出现如下文件图片即可

3,准备数据集配置文件
创建文件(.yaml)内容如下,将该文件放到data目录下的scripts文件下


path: ../fire_yolo_format #存放数据集文件路径,这里是火灾检测,所以数据集命名为这个
train: images/train #存放训练集文件路径
val: images/val #验证集文件路径
test: images/test #测试集文件路径
#以上均为根目录
#此实例文件格式如下
#fire_yolo_format文件下有images和labels文件
#image文件下有test train val 文件
#labels文件下也有 test train val 文件#classes
nc: 1 #一共有多少类别
name: ['fire'] #类别名字4,进行训练
使用命令 python train.py --data fire.yaml --weights yolov5s.pt --img 640进行训练#--img 640指把图片压缩成640*640大小
调参数
detect.py中有如下参数。使用--命令时可能要修改文件地址等

train.py中有如下参数。--epochs表示轮数,可以修改。--batch-size表示一次传入多少图片,通常报下图所示错误时就要把此值调小。--workers指线程,。


利用tensorboard --logdir观察日志
重新打开一个终端,进入到yolo文件目录下,再输入 tensorboard --logdir .回车即可
在--logdir后加一个点表示以当前文件所在路径为根目录打开
回车后会弹出一个网页链接,点进去即可

训练结果
最终的训练结果会保存到runs/train/exp/,将runs/train/exp/weights/best.pt保存起来,后期推理会用到
测试
可以在终端输入python path/to/detect.py --weights yolov5s.pt --source 0 来打开摄像头测试。yolov5s.pt要指明路径,比如
python detect.py --source ./img1.jpg --weights weights/best.pt --conf-thres 0.3
python detect.py --source 0 --weights runs/train/base_n/weights/best.pt --conf-thres0.3
评估
python .\val.py --data .\data\fire.yaml --weights .\weights\best.pt --batch-size 12。输出如下

5,模型转换
PyTorch->ONNX

ONNX->OpenVINO
先通过Netron确认best.onnx的网络结构,如下,在点击此三个Conv,分别在右上角name查看路径

接下来开始转换
#全输出,需要自己修改/model.24/m.0/Conv, /model.24/m.1/Conv, /model.24/m.2/Conv为上述name查询 #的结果
#input_model:需要转换的模型best.onnx
#model_name:导出名称
#s:原始网络输入将除以该值
#reverse_input_channels:RGB转变为BGR(或者从BGR转变为RGB)
#output:模型的输出操作
mo --input_model weights/best,onnx --model_name weights/fire_model -s 255 --reverse_input_channels --output /model.24/m.0/Conv,/model.24/m.1/Conv,/model.24/m.2/Conv输出结果

相关文章:
OpenVINO基本操作流程
环境配置: conda env list:可以查看有哪些环境 conda activate intel:启动某个环境 pip list:可以查看此环境下都下载了哪些软件包 from openvino.inference_engine import IEcore#从OpenVINO推理引擎中导入IECore类 import numpy as np import cv2 1&…...

Spring MVC 注解详解:@RequestBody,@RequestParam 和 @PathVariable
Spring MVC 提供了一系列注解,用于简化请求数据的获取和处理。了解并掌握这些注解的使用,对于开发RESTful API和处理HTTP请求至关重要。本文将详细介绍 RequestBody,RequestParam 和 PathVariable 注解,并附带具体的代码示例&…...

MySQL 8 中的 sql_mode
MySQL 8 中的 sql_mode 设置:提升数据库安全性与性能 在现代数据库管理中,MySQL 是一个广泛使用的开源关系型数据库。随着数据的增长和复杂性增加,良好的数据库配置显得尤为重要。sql_mode 是 MySQL 提供的一个强大功能,它可以帮…...

13种pod的状态
13种pod的状态 生命周期 Pending:Pod被创建后进入调度阶段,k8s调度器依据pod声明的资源请求量和调度规则,为pod挑选一个适合运行的节点。当集群节点不满足pod调度需求时,pod将会处于pending状态。Running:Pod被调度到节点上,k8s将pod调度到节点上后,进入running状态。S…...

2025考研今天开始预报名!攻略请查收
2025年全国硕士研究生招生考试 今天起开始预报名 有什么流程?需要准备哪些信息? 这份考研报名攻略速查收 ↓↓↓ 全国硕士研究生招生考试报名包括网上报名和网上确认两个阶段: 网上预报名时间为10月9日至10月12日(每日9࿱…...

JS中的Promise经典题目解析
这段代码很有代表性,涵盖了多个 JavaScript 知识点,特别是不同异步操作的执行优先级。 async function async1() {console.log(async1 start);await async2();console.log(async1 end); }async function async2() {console.log(async2); }console.log(s…...

【机器学习】金融预测 —— 风险管理与股市预测
我的主页:2的n次方_ 在金融领域,机器学习(ML)已经成为了不可或缺的工具。金融预测,尤其是风险管理和股市预测,涉及海量数据和复杂模式的分析,而这些正是机器学习擅长处理的领域。通过分析历…...

Bootstrap 5 分页组件使用教程
Bootstrap 5 分页组件使用教程 引言 Bootstrap 5 是一个流行的前端框架,它提供了一套丰富的组件和工具,用于快速开发响应式和移动优先的网页。分页组件是 Bootstrap 5 中用于分割长列表或数据集的重要部分,它可以帮助用户更容易地浏览内容。本文将详细介绍如何在您的项目中…...
Linux 安装 NVM 并配置 npm 加速,开发 node 项目不再愁
由于需要在 linux 机器上完成 node 项目的构建,需要安装 nodejs, 想着不同项目需要使用不同的版本,索性安装一下 nvm 吧,因为之前在 windows 上已经安装过 nvm-windows, 应该很容易上手,我尝试了官网提供的几种方式,最…...

MySQL 多条件查询
在 MySQL 中,多条件查询通常使用 WHERE 子句来指定多个条件。这些条件可以通过逻辑运算符(如 AND、OR、NOT)进行组合,以实现复杂的查询需求。以下是一些常见的多条件查询示例: 使用 AND 运算符 AND 运算符用于组合多…...

深度学习模型
1. 引言 在过去的十年间,深度学习的崛起引发了人工智能领域的革命,深刻影响了多个行业。深度学习是一种模仿人脑神经元的工作方式,通过多层神经网络进行数据处理与特征学习。其应用范围从简单的图像识别到复杂的自然语言处理、自动驾驶和医疗…...
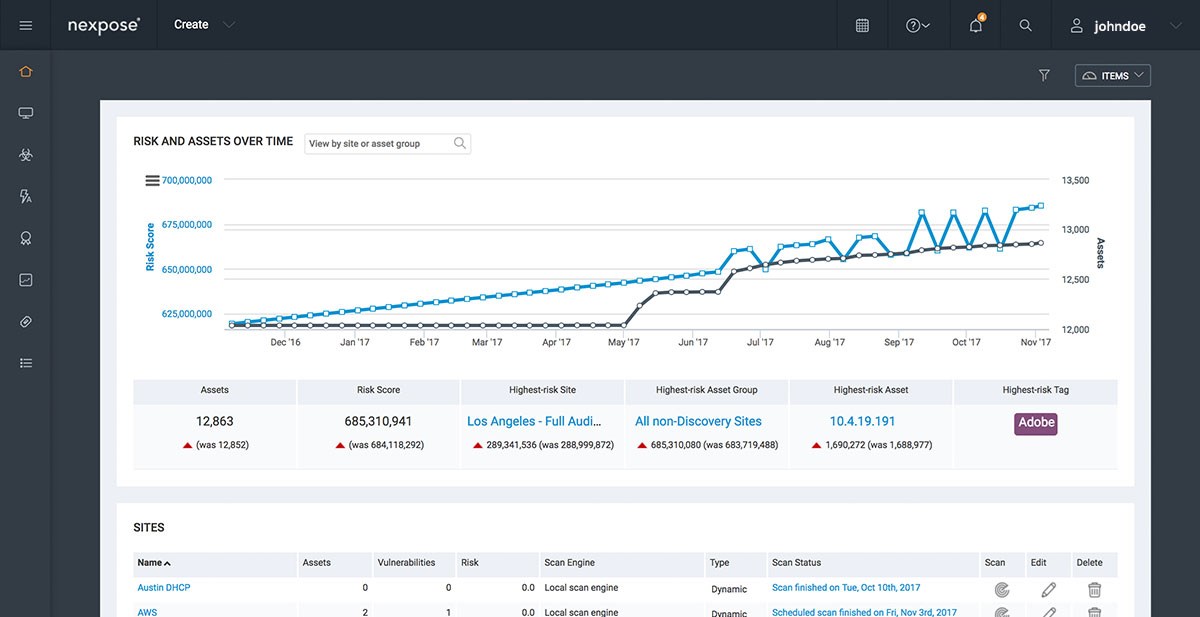
Nexpose 6.6.271 发布下载,新增功能概览
Nexpose 6.6.271 for Linux & Windows - 漏洞扫描 Rapid7 Vulnerability Management, release Sep 26, 2024 请访问原文链接:https://sysin.org/blog/nexpose-6/,查看最新版。原创作品,转载请保留出处。 作者主页:sysin.or…...
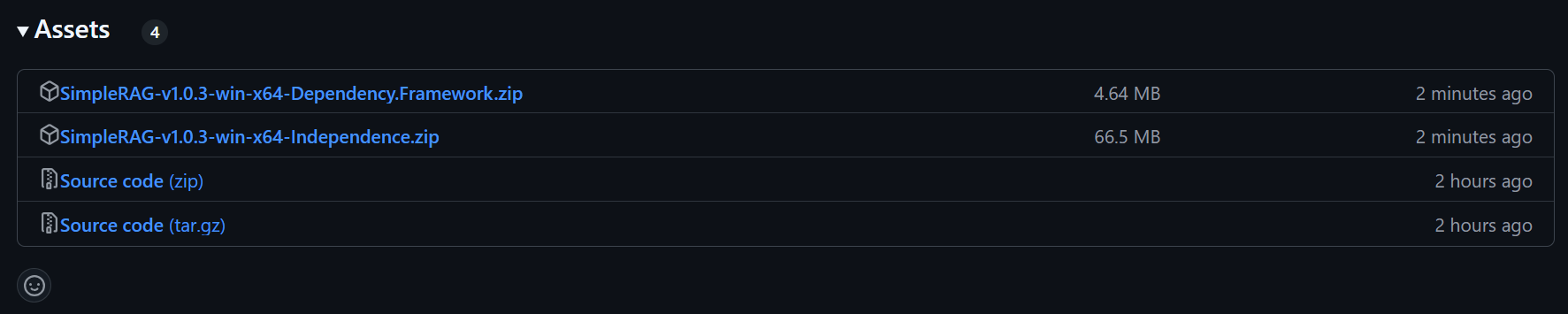
SimpleRAG-v1.0.3:增加文件对话功能
Kimi上有一个功能,就是增加文件之后对话,比如我有如下一个私有文档: 会议主题:《如何使用C#提升工作效率》 参会人员:张三、李四、王五 时间:2024.9.26 14:00-16:00 会议内容: 1. 自动化日常任…...

数学建模算法与应用 第7章 数理统计与方法
目录 7.1 参数估计与假设检验 Matlab代码示例:均值的假设检验 7.2 Bootstrap方法 Matlab代码示例:Bootstrap估计均值的置信区间 7.3 方差分析 Matlab代码示例:单因素方差分析 7.4 回归分析 Matlab代码示例:线性回归 7.5 基…...

【网络】洪水攻击防御指南
洪水攻击防御指南 摘要: 本文深入探讨了洪水攻击的概念、危害以及防御策略。通过Java技术实现,我们将学习如何通过编程手段来增强服务器的安全性。文章不仅提供了详细的技术解读,还包含了实用的代码示例和流程图,帮助读者构建一个…...

应对Redis大Key挑战:从原理到实现
在使用Redis作为缓存或数据存储时,开发者可能会遇到大Key(Big Key)问题。大Key是指在Redis中存储的单个键值对,其值的大小非常大,可能包含大量数据或占用大量内存。大Key问题会导致性能下降、内存消耗过多以及其他潜在…...

网络安全的全面指南
目录 网络安全的全面指南1. 引言2. 网络安全的基本概念3. 网络安全框架4. 常见网络安全攻击及案例4.1 病毒与恶意软件攻击案例4.2 钓鱼攻击案例4.3 DDoS 攻击案例 5. 网络安全最佳实践5.1 强密码策略5.2 定期更新和补丁管理5.3 数据备份与恢复策略 6. 企业网络安全策略6.1 安全…...

前端性能优化全面指南
前端性能优化是提升用户体验的关键,页面加载速度、响应时间和交互流畅度直接影响用户的留存率和满意度。以下是常用的前端性能优化方法,从网络层、资源加载、JavaScript 执行、渲染性能等方面进行全方位优化。 减少 HTTP 请求 合并文件:将多…...
)
JavaScript-API(倒计时的实现)
基础知识 1.时间对象的使用 1.1 实例化 要获取一个时间首先需要一个关键词new了实例化 const time new Date() 如果是获取具体的具体的时间 const time new Date(2024-6-1 16:06:44) 1.2 日期对象方法 方法作用说明getFullYear()获得年份获得4…...

【C++】——继承【上】
P. S.:以下代码均在VS2019环境下测试,不代表所有编译器均可通过。 P. S.:测试代码均未展示头文件stdio.h的声明,使用时请自行添加。 博主主页:Yan. yan. …...

【AI+实战】零基础部署私人ChatGPT网站:从NextChat到功能定制
1. 为什么你需要一个私人ChatGPT网站? 最近两年AI对话机器人的火爆程度,相信大家都有目共睹。但你是否遇到过这些问题:公共平台经常排队、担心隐私泄露、或者想要定制专属功能?这就是为什么越来越多的个人和小团队开始搭建自己的C…...
在KITTI数据集上的完整流程)
从代码到部署:手把手复现CenterPoint(PyTorch版)在KITTI数据集上的完整流程
从零实现CenterPoint:KITTI数据集3D目标检测全流程实战指南 为什么选择CenterPoint进行3D目标检测? 在自动驾驶和机器人感知领域,3D目标检测一直是核心技术难题。传统基于锚框(Anchor-based)的方法在处理旋转物体时表现…...

Qt, C++数据类型扩展问题
Qt项目中ObjectDic类的类型扩展与代码优化 前言 在Qt项目开发中,我们经常会遇到需要处理不同类型数据的情况,尤其是当涉及到负数时,类型的选择就显得尤为重要。本文将详细介绍如何在Qt项目中扩展ObjectDic类的类型支持,从无符号整…...

实战指南:基于快马平台生成Spring Boot电商后端并部署于腾讯云龙虾
最近在做一个电商平台的后端开发项目,需要快速搭建一套完整的API服务。考虑到腾讯云龙虾服务器性价比高,特别适合中小型Web应用部署,我决定用Spring Boot框架来实现。整个过程在InsCode(快马)平台上完成,从代码生成到部署上线一气…...

终极指南:如何用Vortex模组管理器轻松管理250+游戏模组
终极指南:如何用Vortex模组管理器轻松管理250游戏模组 【免费下载链接】Vortex Vortex: Nexus-Mods开发的游戏模组管理器,用于简化模组的安装和管理过程。 项目地址: https://gitcode.com/gh_mirrors/vor/Vortex 还在为游戏模组安装繁琐、冲突不断…...

Linux系统CPU负载与使用率详解及性能监控
1. CPU负载与CPU使用率的本质区别在Linux系统监控和性能调优过程中,CPU负载和CPU使用率这两个指标经常被混淆使用。作为系统管理员,我曾多次遇到团队成员将这两个概念混为一谈的情况,这往往导致对系统性能问题的误判。让我们先从一个实际案例…...

从MATLAB验证到FPGA上板:双频信号叠加的完整开发闭环实战
从MATLAB验证到FPGA上板:双频信号叠加的完整开发闭环实战 在数字信号处理领域,实现双频信号的精确叠加是一个常见但极具挑战性的任务。无论是通信系统中的载波调制,还是音频处理中的音效合成,都需要工程师能够准确地在硬件层面实现…...
——从艾里斑到系统分辨率:衍射极限的实战解析)
Zemax光学设计(三)——从艾里斑到系统分辨率:衍射极限的实战解析
1. 艾里斑:光学的终极像素 当你用手机拍夜景时,为什么远处的路灯总变成模糊的光团?这背后隐藏着光学系统的基本限制——艾里斑。我在设计微型内窥镜镜头时,曾花了三周时间优化像差,最终却发现图像清晰度卡在一个无法突…...

别再傻等DockerHub了!手把手教你配置阿里云镜像加速,5分钟搞定MySQL 8.0拉取
国内开发者必备:5分钟配置Docker镜像加速全攻略 每次在终端输入docker pull后,看着进度条像蜗牛一样缓慢移动,或者干脆直接报错Error response from daemon,这种体验对国内开发者来说再熟悉不过了。DockerHub的服务器远在海外&am…...

【AI知识点】交叉注意力机制:连接不同世界的“信息桥梁”
1. 从"信息桥梁"理解交叉注意力机制 想象你正在同时阅读一本英文书和它的中文翻译版。当你遇到一个不太理解的英文句子时,会自然地在中文版本中寻找对应的段落来帮助理解——这个过程就像交叉注意力机制在神经网络中的工作方式。它就像是架设在两个不同世…...