基于STM32的手势电视机遥控器设计
引言
本项目设计了一个基于STM32的手势电视机遥控器,利用红外线传输和加速度传感器(或陀螺仪)检测用户的手势动作,用于控制电视的音量、频道切换等操作。通过对手势的实时检测和分类,系统能够识别左右、上下、旋转等手势,并将相应的控制命令通过红外发送给电视机,实现无接触式控制。
环境准备
1. 硬件设备
- STM32F103C8T6 开发板(或其他 STM32 系列)
- MPU6050 加速度计和陀螺仪模块(用于手势检测)
- 红外线发射模块(用于发送电视控制命令)
- OLED 显示屏(用于显示手势状态)
- 蜂鸣器(用于操作提示)
- USB-TTL 串口调试工具
- 电阻、杜邦线、面包板等基础电子元件
2. 软件工具
- STM32CubeMX:用于初始化 STM32 外设。
- Keil uVision 或 STM32CubeIDE:用于编写和下载代码。
- ST-Link 驱动程序:用于下载程序到 STM32。
项目实现
1. 硬件连接
- 加速度计和陀螺仪模块连接:将 MPU6050 的 SDA 和 SCL 引脚连接到 STM32 的 I2C 接口(如 PB6 和 PB7),用于获取手势动作。
- 红外发射模块连接:将红外发射模块的控制引脚连接到 STM32 的 GPIO(如 PA0),用于发送控制信号。
- OLED 显示屏连接:将 OLED 的 SDA 和 SCL 引脚连接到 STM32 的 I2C 接口(如 PB6 和 PB7),用于显示手势和操作状态。
- 蜂鸣器连接:将蜂鸣器的控制引脚连接到 STM32 的 GPIO(如 PA1),用于操作成功提示。
- 其他连接:为 STM32、传感器和显示屏提供适当的电源,并确保信号线接线正确。
2. STM32CubeMX 配置
- 打开 STM32CubeMX,选择你的开发板型号。
- 配置系统时钟为 HSI,确保系统稳定运行。
- 配置 GPIO 用于控制红外发射模块和蜂鸣器。
- 配置 I2C,用于与 MPU6050 和 OLED 显示屏通信。
- 生成代码,选择 Keil 或 STM32CubeIDE 作为工具链。
3. 编写主程序
在生成的项目基础上,编写手势检测、红外发射、OLED显示和操作提示的代码。以下是手势电视机遥控器的基本代码示例:
#include "stm32f1xx_hal.h"
#include "mpu6050.h"
#include "oled.h"
#include "ir.h"
#include "gpio.h"// 定义手势识别参数
#define GESTURE_LEFT_THRESHOLD -0.5
#define GESTURE_RIGHT_THRESHOLD 0.5
#define GESTURE_UP_THRESHOLD 0.5
#define GESTURE_DOWN_THRESHOLD -0.5// 定义电视机控制命令
#define TV_VOLUME_UP 0x10
#define TV_VOLUME_DOWN 0x11
#define TV_CHANNEL_UP 0x20
#define TV_CHANNEL_DOWN 0x21// 函数声明
void System_Init(void);
void Detect_Gesture(void);
void Send_TV_Command(uint8_t command);
void Display_Status(const char* status);// 全局变量
float accel_x = 0, accel_y = 0, accel_z = 0; // 加速度数据void System_Init(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_I2C1_Init();OLED_Init();MPU6050_Init();IR_Init();OLED_ShowString(0, 0, "Gesture Remote Ready");
}// 手势检测逻辑
void Detect_Gesture(void)
{MPU6050_GetAccelData(&accel_x, &accel_y, &accel_z); // 获取加速度数据if (accel_x < GESTURE_LEFT_THRESHOLD){Send_TV_Command(TV_CHANNEL_DOWN); // 左滑手势,切换频道Display_Status("Channel Down");}else if (accel_x > GESTURE_RIGHT_THRESHOLD){Send_TV_Command(TV_CHANNEL_UP); // 右滑手势,切换频道Display_Status("Channel Up");}else if (accel_y > GESTURE_UP_THRESHOLD){Send_TV_Command(TV_VOLUME_UP); // 上滑手势,音量加Display_Status("Volume Up");}else if (accel_y < GESTURE_DOWN_THRESHOLD){Send_TV_Command(TV_VOLUME_DOWN); // 下滑手势,音量减Display_Status("Volume Down");}
}// 发送电视命令
void Send_TV_Command(uint8_t command)
{IR_SendCommand(command); // 通过红外发送命令HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_SET); // 蜂鸣器提示HAL_Delay(100); // 提示时长HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_RESET);
}// 显示操作状态
void Display_Status(const char* status)
{OLED_Clear();OLED_ShowString(0, 0, status); // 显示手势操作结果
}int main(void)
{System_Init();while (1){Detect_Gesture(); // 检测手势HAL_Delay(500); // 每0.5秒检测一次}
}
4. 各模块代码
MPU6050 手势检测
通过 MPU6050 获取加速度数据,用于检测手势方向:
#include "mpu6050.h"// 初始化 MPU6050
void MPU6050_Init(void)
{// 配置 I2C,初始化 MPU6050 模块
}// 获取加速度数据
void MPU6050_GetAccelData(float* accel_x, float* accel_y, float* accel_z)
{// 从 MPU6050 读取加速度数据*accel_x = -0.3; // 假设获取到的加速度值*accel_y = 0.4;*accel_z = 9.8;
}
红外发射
通过红外发射模块发送电视控制命令:
#include "ir.h"// 初始化红外发射模块
void IR_Init(void)
{// 配置 GPIO 用于控制红外发射
}// 发送红外控制命令
void IR_SendCommand(uint8_t command)
{// 根据电视机的红外协议,发送相应的命令switch (command){case TV_VOLUME_UP:// 发送音量加的红外信号break;case TV_VOLUME_DOWN:// 发送音量减的红外信号break;case TV_CHANNEL_UP:// 发送频道加的红外信号break;case TV_CHANNEL_DOWN:// 发送频道减的红外信号break;}
}
OLED 显示
用于显示当前的手势状态和操作结果:
#include "oled.h"// 初始化 OLED 显示屏
void OLED_Init(void)
{// OLED 初始化代码
}// 显示字符串
void OLED_ShowString(uint8_t x, uint8_t y, const char *str)
{// 在 OLED 显示屏上显示字符串
}// 清屏
void OLED_Clear(void)
{// 清除 OLED 显示内容
}
蜂鸣器提示
通过蜂鸣器提示用户操作成功:
#include "gpio.h"// 初始化蜂鸣器
void Buzzer_Init(void)
{// 配置 GPIO,用于控制蜂鸣器
}// 控制蜂鸣器发声
void Buzzer_Beep(void)
{HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_SET); // 启动蜂鸣器HAL_Delay(100); // 提示时长HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_RESET); // 关闭蜂鸣器
}
⬇帮大家整理了单片机的资料
包括stm32的项目合集【源码+开发文档】
点击下方蓝字即可领取,感谢支持!⬇
点击领取更多嵌入式详细资料
问题讨论,stm32的资料领取可以私信!
系统工作原理
-
手势检测:系统通过 MPU6050 获取用户手势的加速度和方向信息,并通过设定的阈值区分不同的手势。手势检测到的左右滑动、上下滑动分别对应电视机的音量调节和频道切换。
-
红外发射控制:检测到手势后,系统通过红外发射模块发送相应的电视控制命令,完成电视音量和频道的调整。
-
状态提示与显示:OLED 显示屏实时显示当前的手势操作,蜂鸣器则用于提示用户操作成功。
常见问题与解决方法
1. 手势识别不准确
- 问题原因:加速度传感器灵敏度不够,或者阈值设置不当。
- 解决方法:优化加速度传感器的参数调整,增加手势识别算法的精度,如通过多个传感器数据进行融合,降低误判率。
2. 红外信号传输不稳定
- 问题原因:红外模块与电视的通信协议不匹配或信号强度不足。
- 解决方法:确保红外信号的编码格式符合电视机的协议,并调整发射模块的位置和方向,以获得更好的传输效果。
3. OLED 显示异常
- 问题原因:I2C 通信故障或 OLED 显示模块损坏。
- 解决方法:检查 I2C 连接,确保 OLED 模块正常初始化。
扩展功能
- 多功能手势扩展:通过优化手势识别算法,可以添加更多的手势功能,如手势暂停/播放、菜单导航等。
- 语音控制:集成语音识别模块,实现手势和语音相结合的电视控制方式。
- 蓝牙/Wi-Fi 遥控:可以增加蓝牙或 Wi-Fi 模块,实现手机远程控制或通过无线网络控制电视机。
结论
通过本项目,我们设计了一个基于 STM32 的手势电视机遥控器,能够通过检测手势动作,结合红外发射模块实现对电视的无接触式控制。系统集成了手势识别、红外发射、操作提示等功能,具备便捷性和实用性,适用于智能家居场景。未来可以通过增加更多的手势功能和无线网络支持,进一步提升系统的多样性和智能化水平。
相关文章:

基于STM32的手势电视机遥控器设计
引言 本项目设计了一个基于STM32的手势电视机遥控器,利用红外线传输和加速度传感器(或陀螺仪)检测用户的手势动作,用于控制电视的音量、频道切换等操作。通过对手势的实时检测和分类,系统能够识别左右、上下、旋转等手…...

2、图像的特征
一、角点检测-Harris 1、cv2.cornerHarris角点检测函数 在 cv2.cornerHarris 函数中,Sobel 算子用于计算图像的梯度,这是 Harris 角点检测的第一步。 cv2.cornerHarris(src, blockSize, ksize, k, dstNone, borderTypeNone)下面是各个参数的详细解释&…...

URL、URN和URI的区别
目录 一:URI二:URN三:URL1. URL格式 一:URI URI 是(Uniform Resource Identifier)统一资源标识符的缩写。用于唯一标识互联网上的资源。URI包含了URN和URL 二:URN URN是(Uniform …...
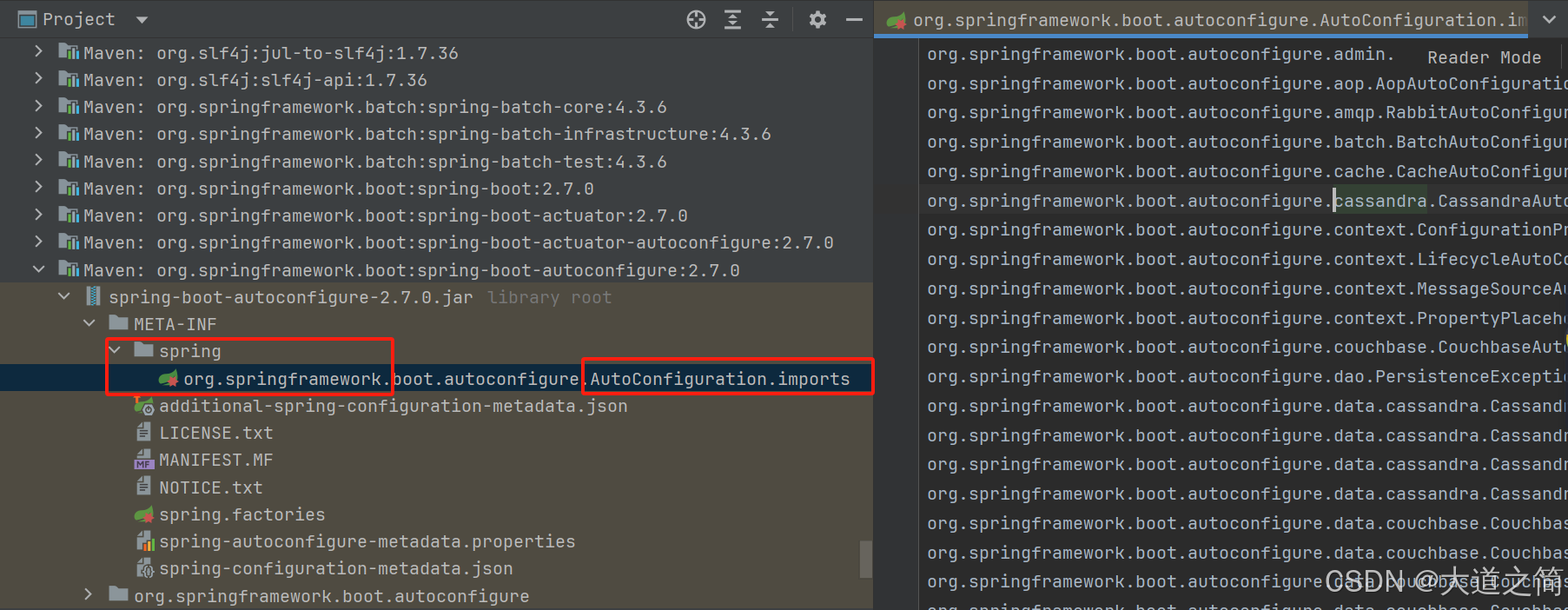
深入理解Spring框架几个重要扩展接口
本文介绍Spring框架的几个日常开发重要扩展接口,方便日常项目中按需扩展使用。 一、Processor 系列接口 用途: Processor 系列接口包括 BeanPostProcessor 和 BeanFactoryPostProcessor,它们的设计目的是在 Spring 容器启动过程中对 Bean 和…...

使用dotnet-counters和dotnet-dump 分析.NET Core 项目内存占用问题
在.NET Core 项目部署后,我们往往会遇到内存占用越来越高的问题,但是由于项目部署在Linux上,因此无法使用VS的远程调试工具来排查内存占用问题。那么这篇文章我们大家一起来学习一下如何排查内存占用问题。 首先,我们来看一下应用…...
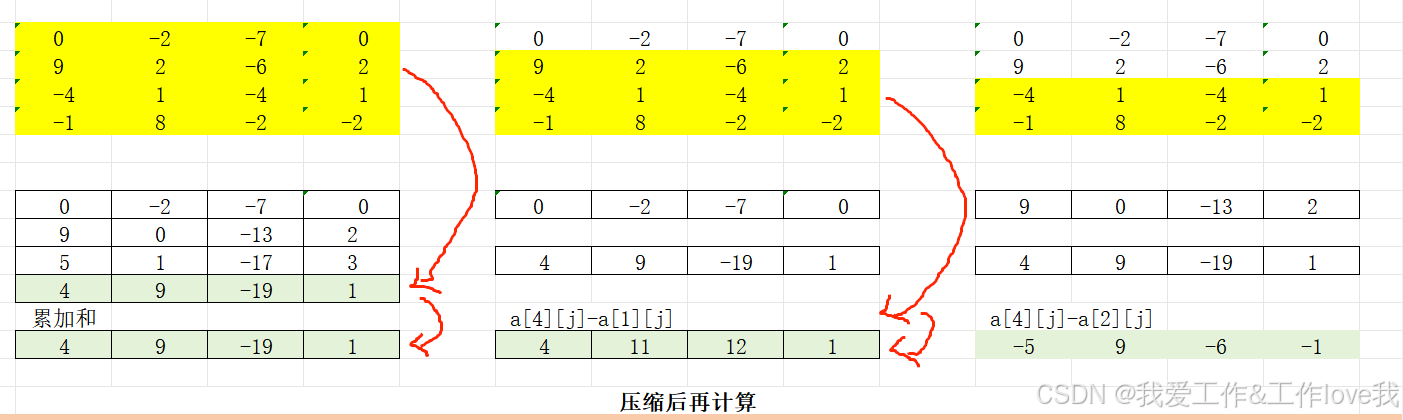
1282:最大子矩阵
题目: 已知矩阵的大小定义为矩阵中所有元素的和。给定一个矩阵,你的任务是找到最大的非空(大小至少是1 1)子矩阵。 比如,如下4 4的矩阵 0 -2 -7 0 9 2 -6 2 -4 1 -4 1 -1 8 0 -2 的最大子矩阵是 9 2 -4 1 -1 8 这个子矩阵的大小是15。 …...
)
C++编程语言:抽象机制:特殊运算符(Bjarne Stroustrup)
第19章 特殊运算符(Special Operators) 目录 19.1 引言 19.2 特殊运算符(Special Operators) 19.2.1 下标运算符(Subscripting) 19.2.2 函数调用运算符(Function Call) 19.2.3 解引用(Dereferencing) 19.2.4 递增和递减(Increment and Decrement) 19…...
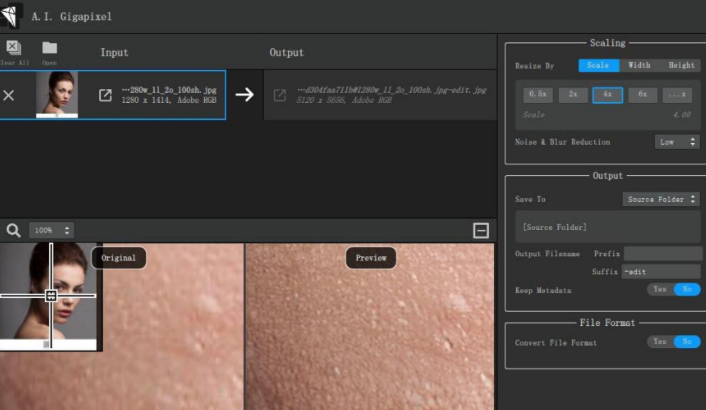
图片无损放大工具Topaz Gigapixel AI v7.4.4 绿色版
Topaz A.I. Gigapixel是这款功能齐全的图象无损变大运用,应用可将智能机拍摄的图象也可以有着专业相机的高质量大尺寸作用。你可以完美地放大你的小照片并大规模打印,它根本不会粘贴。它具有清晰的效果和完美的品质。 借助AIGigapixel,您可以…...
)
Vue中计算属性computed—(详解计算属性vs方法Methods,包括案例+代码)
文章目录 计算属性computed3.1 概述3.2 使用3.3 计算属性vs方法Methods3.4 计算属性的完整写法 计算属性computed 3.1 概述 基于现有的数据,计算出来的新属性。 依赖的数据变化,自动重新计算 语法: 声明在 computed 配置项中,…...
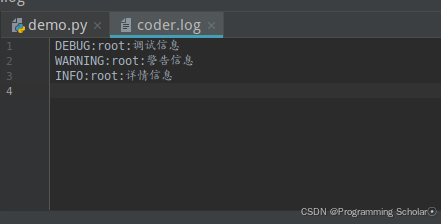
Python程序设计 内置函数 日志模块
logging(日志) 日志记录是程序员工具箱中非常有用的工具。它可以帮助您更好地理解程序的流程,并发现您在开发过程中可能没有想到的场景。 日志为开发人员提供了额外的一组眼睛,这些眼睛不断关注应用程序正在经历的流程。它们可以存储信息,例…...

中标麒麟v5安装qt512.12开发软件
注意 需要联网操作 遇到问题1:yum提示没有可用软件包问题 终端执行如下命令 CentOS7将yum源更换为国内源保姆级教程 中标麒麟V7-yum源的更换(阿里云源) wget -O /etc/yum.repos.d/CentOS-Base.repo http://mirrors.aliyun.com/repo/Cento…...
)
每日算法一练:剑指offer——数组篇(3)
1.报数 实现一个十进制数字报数程序,请按照数字从小到大的顺序返回一个整数数列,该数列从数字 1 开始,到最大的正整数 cnt 位数字结束。 示例 1: 输入:cnt 2 输出:[1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,1…...

Java代码说明设计模式
以下是使用 Java 代码分别说明设计模式中的工厂模式、抽象工厂模式(这里推测你可能想说的是抽象工厂模式而非虚拟工厂模式)、建造者模式和观察者模式。 一、工厂模式 工厂模式是一种创建对象的设计模式,它提供了一种创建对象的方式…...
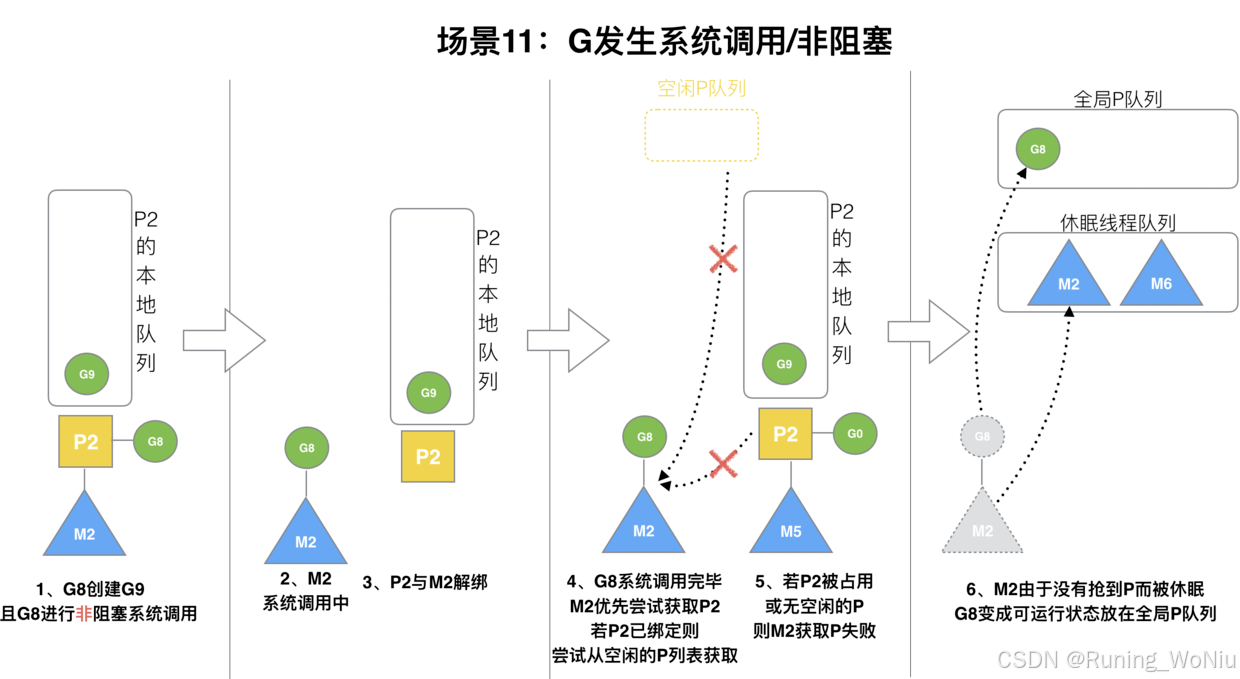
Golang笔记_day06
一、GMP 调度器 1、调度器理解思路 理解golang的调度器要从进程到协程演进来说明: 进程--->线程--->协程---> golang的协程(goroutine) 从上图可以看出,进程到多线程到协程,最终目的就是为了提高CPU的利用率…...
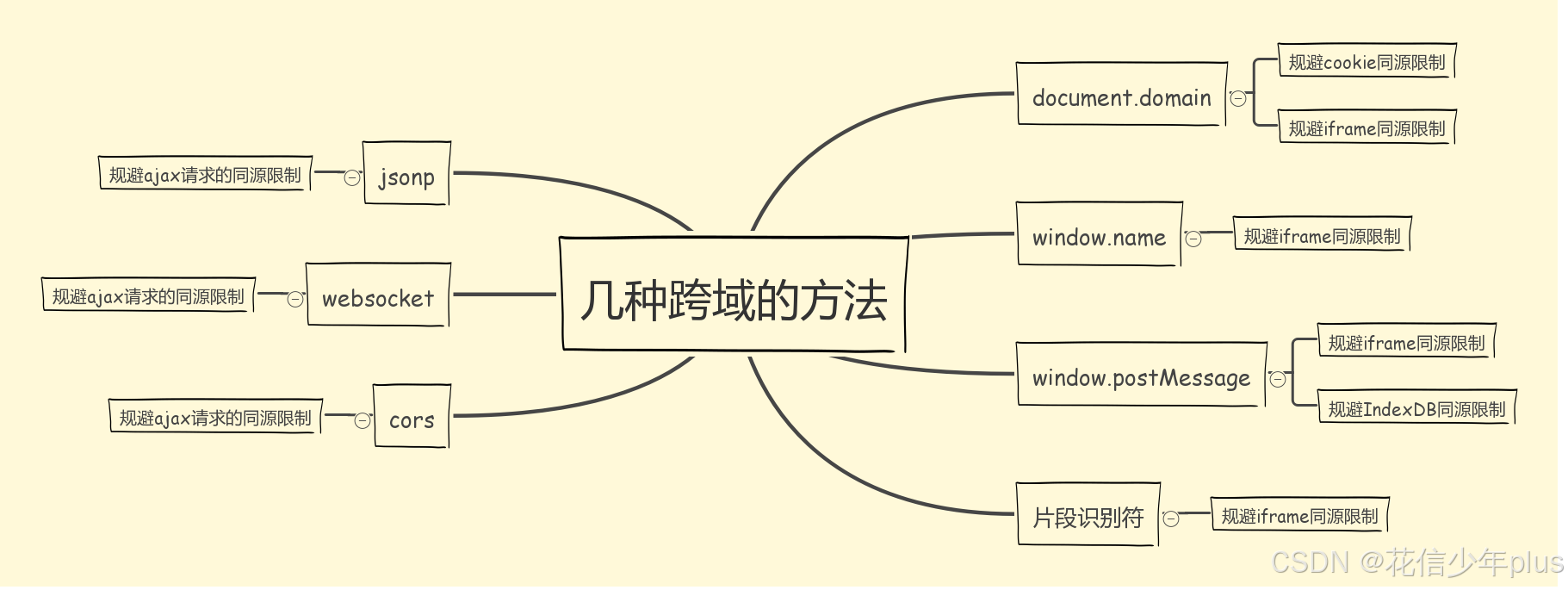
「从零开始的 Vue 3 系列」:第十一章——跨域问题解决方案全解析
前言 本系列将从零开始,系统性地介绍 Vue 3 的常用 API,逐步深入每个核心概念与功能模块。通过详尽的讲解与实战演示,帮助大家掌握 Vue 3 的基础与进阶知识,最终具备独立搭建完整 Vue 3 项目的能力。 第十一章:跨域问…...

C语言结构体数组 java静动数组及问题
1. (1)先声明,后定义:如上一天 //(2).声明时直接定义 #define N 5 typedef struct student { int num; int score; }STU; int main(void) { STU class3[N] { {10,90},{14,70},{8,95} }; …...
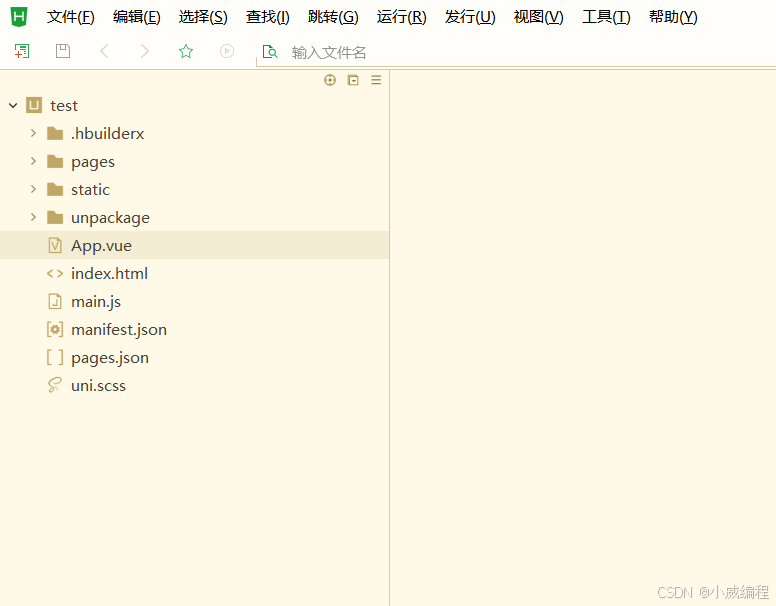
uniapp项目结构基本了解
基本结构的解释 App.vue:应用的根组件,定义全局布局和逻辑。pages/:存放各个页面的 .vue 文件,定义应用的具体页面和功能模块。main.js:应用入口文件,初始化应用,挂载 App.vue。manifest.json&…...

常见Web知识1
List item 常见Web知识1 JSON: JSON(JavaScript Object Notation)是一种轻量级的数据交换格式,易于人类阅读和编写,同时也易于机器解析和生成。它通常用于客户端和服务器之间的数据传输。 JSON 结构 JSON 主要由两…...
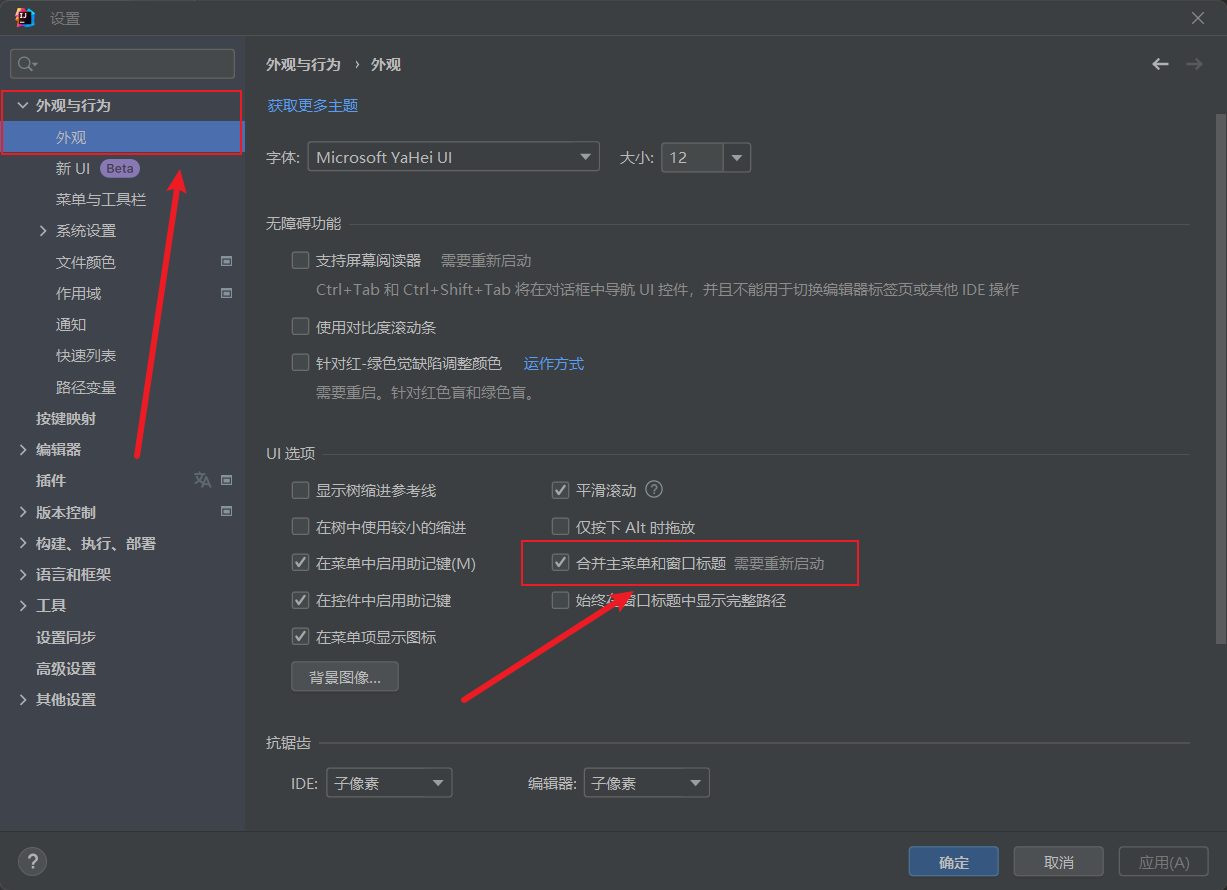
新版idea菜单栏展开与合并
新版idea把菜单栏合并了看着很是不习惯,找了半天原来在这里展开 ① 点击文件 -> 设置 ② 点击外观与行为 -> 外观 -> 合并主菜单和窗口标题 然后确定,重启即可...
聊聊Go语言的异常处理机制
背景 最近因为遇到了一个panic问题,加上之前零零散散看了些关于程序异常处理相关的东西,对这块有点兴趣,于是整理了一下golang对于异常处理的机制。 名词介绍 Painc golang的内置方法,能够改变程序的控制流。 当函数调用了pan…...

Phi-4-reasoning-vision-15B部署教程:开源大模型镜像适配国产GPU方案
Phi-4-reasoning-vision-15B部署教程:开源大模型镜像适配国产GPU方案 1. 模型介绍 Phi-4-reasoning-vision-15B是微软推出的视觉多模态推理模型,具备强大的图像理解和分析能力。这个15B参数规模的模型特别擅长处理需要结合视觉和语言理解的复杂任务。 …...

ESP32S3-Cam + MPU6050 DMP移植避坑实录:从编译报错到姿态数据稳定输出的完整流程
ESP32S3-Cam与MPU6050 DMP移植实战:从编译报错到稳定姿态解算的全流程解析 当ESP32S3-Cam遇上MPU6050的DMP(数字运动处理器)功能,本应是物联网项目中实现低成本姿态检测的完美组合。但实际移植过程中,开发者往往会遭遇…...

Ostrakon-VL-8B LaTeX文档自动化:将手写公式草图转换为排版代码
Ostrakon-VL-8B LaTeX文档自动化:将手写公式草图转换为排版代码 每次写论文或者报告,最头疼的部分是什么?对我而言,绝对是敲那些复杂的LaTeX公式。一个积分符号、一个分式结构,往往要花上好几分钟去回忆语法、调整括号…...

终极无损视频剪辑神器:LosslessCut完整指南与5大实用技巧
终极无损视频剪辑神器:LosslessCut完整指南与5大实用技巧 【免费下载链接】lossless-cut The swiss army knife of lossless video/audio editing 项目地址: https://gitcode.com/gh_mirrors/lo/lossless-cut 你是否曾因视频剪辑导致画质下降而烦恼ÿ…...

SPM12实战:从nii文件元数据解析到精准slice timing配置
1. 理解nii文件与slice timing的基础概念 当你第一次拿到fMRI的nii格式数据时,可能会被这个黑箱般的文件格式搞得一头雾水。nii文件就像是把整个大脑扫描过程打包成一个数字包裹,里面不仅包含三维的脑部图像数据,还隐藏着关键的扫描参数。我在…...

Qwen2-VL-2B-Instruct一键部署教程:基于Ubuntu 20.04的GPU环境快速搭建
Qwen2-VL-2B-Instruct一键部署教程:基于Ubuntu 20.04的GPU环境快速搭建 你是不是也遇到过这种情况?看到一个很酷的多模态大模型,想立刻上手试试,结果被复杂的依赖安装、环境配置、驱动适配搞得头大,折腾半天还没跑起来…...

从裸机到RTOS:IMX6ULL启动流程与FreeRTOS源码实战解析
1. IMX6ULL裸机启动机制详解 第一次拿到IMX6ULL开发板时,很多人会疑惑:为什么我的程序烧录进去没反应?这得从芯片的启动机制说起。IMX6ULL上电后最先执行的并不是我们写的代码,而是芯片内部ROM中的固化程序。这个ROM代码就像个尽职…...

在GCP上运行autoresearch
Andrej Karpathy最近开源了autoresearch,这是一个将真实LLM训练环境交给AI代理并让它自主实验的项目。代理修改模型代码,训练恰好5分钟,检查验证损失是否改善,保留或丢弃更改,然后重复。你去睡觉;醒来时会看…...

Qwen3-0.6B-FP8应用场景:开发者测试LLM应用前端UI兼容性的沙盒环境
Qwen3-0.6B-FP8应用场景:开发者测试LLM应用前端UI兼容性的沙盒环境 1. 引言:为什么需要一个轻量级的“测试沙盒”? 如果你正在开发一个基于大语言模型的应用,比如一个智能客服系统、一个文档助手,或者一个创意写作工…...
)
马西奎《电磁场与电磁波》学习记录-第 2 章学前准备-坐标系的深入 + 微分元(dl、dS、dV)
一、正交坐标系的一般概念1. 什么是正交曲线坐标系三组坐标面互相垂直正交单位矢量处处正交:⊥⊥直角、圆柱、球坐标都属于这一类。2. 坐标变量与拉梅系数(度量系数)对一般正交曲线坐标 (,,):坐标面:常数、…...