day05(单片机)SPI+数码管
目录
SPI+数码管
SPI通信
SPI总线介绍
字节交换原理
时序单元
SPI模式
模式0
模式1
模式2
模式3
数码管
介绍
74HC595芯片分析
原理图分析
cubeMX配置
程序编写
硬件SPI
软件SPI
作业:
SPI+数码管
SPI通信
SPI总线介绍
SPI接口是Motorola 首先提出的全双工三线/四线同步串行外围接口采用主从模式(Master Slave)架构。
时钟由Master控制,在时钟移位脉冲下,数据按位传输,高位在前,低位在后(MSB first);SPI接口有2根单向数据线,为全双工通信。
SPI总线被广泛地使用在FLASH、ADC、LCD等设备与MCU间,要求通讯速率较高的场合。

一主多从的同步串行全双工通信
Master 主机 Slave 从机
MISO 主机输入从机输出 MOSI 主机输出从机输入 SS Slave Select(片选线)从机选择
SCK system clock 时钟
所有的输出口在输出的时候要配置成推挽输出,这样在没有外部上拉电阻的情况的也可以有较强的输出高低电平的能力。但需要考虑一点:当主机跟从机3进行通信的时候,从机2和从机1的MISO线如果是推挽输出(推挽必输出高电平或低电平的一种)那肯定会影响主机跟从机三的正常通信,所以为了消去这一影响,让从机SS片选线为高电平,即非选中状态时对应从机输出口置为高阻态,这样既不是高电平也不是低电平不会影响主机跟所选中从机的正常通信。
字节交换原理

字节交换基于位交换的
位交换分为两部分:移出 移入
移出:就是把当前移位寄存器的最高位写到信号线上,然后整体往左移动一位
移入(采样):读取信号线的状态,然后把读到的状态放到寄存器的最低位
移入 主机和从机同时进行
移出 主机和从机同时进行
移入和移出的时机是由时钟线控制约定的,约定好第几个边沿一起移出,第几个边沿一起移入。
时序单元
•起始条件:SS从高电平切换到低电平
•终止条件:SS从低电平切换到高电平

SPI模式
由CPOL及CPHA的不同状态,SPI分成了四种模式,主机与从机需要工作在相同的模式下才可以正常通讯,因此通常主机要按照从机支持的模式去设置
CPOL: 时钟极性
CPHA: 时钟相位

模式0

模式1


模式2

模式3

数码管
介绍
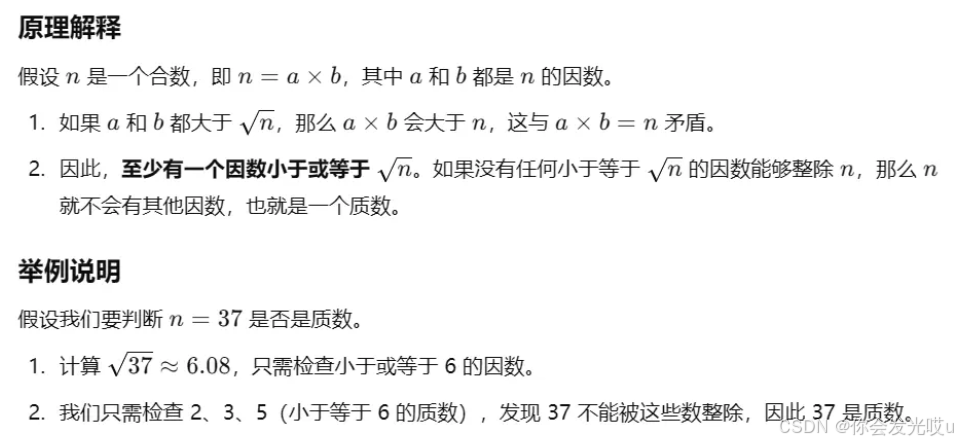
LED数码管(LED Segment Displays)是由8个发光二极管构成,并按照一定的图形及排列封装在一起的显示器件。其中7个LED构成7笔字形,1个LED构成小数点(固有时成为八段数码管)。
LED数码管有两大类,一类是共阴极接法,另一类是共阳极接法,共阴极就是7段的显示字码共用一个电源的负极,是高电平点亮,共阳极就是7段的显示字码共用一个电源的正极,是低电平点亮。

我们对数码管所要显示的每个数字和字母进行编码,然后在编程时,将编码放在一个数组上,需要显示什么数字或者字母,从数组里面提取相应的编码就可显示所要显示的字符了。
如图,要显示数字“5”时,编码为0x6D。如果数码管为共阳极,只需要对共阴极的编码做一个取反操作即可。

74HC595芯片分析
一定好好看此文章
一文搞懂74HC595芯片(附使用方法)_74hc595芯片引脚图及功能-CSDN博客

原理图分析


我们本次所使用的是一款四段共阴极八位数码管,每个数码管的使能相对独立,各个数码管使用对应的三极管(NPN)进行使能控制。

由于数码管所需的管脚较多,我们使用SPI总线+74HC595(背过)芯片实现对数码管的控制。
(注:图中SPI4对应的即为SPI2)
74HC595是一款8位串行输入、并行输出的位移寄存器,在本次项目中,使用其将SPI串行传递过来的数据并行发送给对应数码管与显示位。SER为数据输入引脚。
位信号为:






SPI2_NSS——PB12(锁存,可设置为Output,低-》高就可以命令595芯片并行输出)
SPI2_SCK——PB13(SPI时钟)
SPI2_MISO——PB14(主机输入从机输出)---对本例子不重要
SPI2_MOSI——PB15(主机输出从机输入)
cubeMX配置


程序编写
硬件SPI

/* USER CODE BEGIN 0 */
//定义一个保存了所有数字显示状态的数组
const uint8_t number[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; //数字显示//定义一个用于保存想要显示的数字的变量
volatile uint16_t show_number = 0x1234; //使用volatile使变量不被优化,每次都刷新读取//数码管显示函数
void led_dispaly()
{
uint8_t which_where_data[2] = {0x00, 0x00}; //创建一个用于保存段选与位选的数组//使用switch进行判断,由于一次只能点亮一个,需要引入一个变量进行自增,循环对应各数码管static uint8_t choose = 0; //用于位循环switch(choose){case 0:
which_where_data[0] = 0x08; //1-4位顺序为 0x01 0x02 0x04 0x08
which_where_data[1] = number[show_number & 0x000F]; //将想要显示的数字与之相&,就相当于盖上了其他位//SPI传输函数,参数为使用的SPI通道、要传输的数据、数据长度、超时时间HAL_SPI_Transmit(&hspi2,which_where_data,2,10);//进行锁存操作,等效于写入一高一低电平HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,GPIO_PIN_SET);HAL_Delay(1);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,GPIO_PIN_RESET); choose++; //移动至下一位break;case 1:
which_where_data[0] = 0x04; //1-4位顺序为 0x01 0x02 0x04 0x08
which_where_data[1] = number[show_number>>4 & 0x000F]; // >>4 取第三位//SPI传输函数,参数为使用的SPI通道、要传输的数据、数据长度、超时时间HAL_SPI_Transmit(&hspi2,which_where_data,2,10);//进行锁存操作,等效于写入一高一低电平HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,GPIO_PIN_SET);HAL_Delay(1);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,GPIO_PIN_RESET);
choose++; //移动至下一位break;case 2:
which_where_data[0] = 0x02; //1-4位顺序为 0x01 0x02 0x04 0x08
which_where_data[1] = number[show_number>>8 & 0x000F];//SPI传输函数,参数为使用的SPI通道、要传输的数据、数据长度、超时时间HAL_SPI_Transmit(&hspi2,which_where_data,2,10); //进行锁存操作,等效于写入一高一低电平HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,GPIO_PIN_SET);HAL_Delay(1);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,GPIO_PIN_RESET); choose++; //移动至下一位break;case 3:
which_where_data[0] = 0x01;//1-4位顺序为 0x01 0x02 0x04 0x08
which_where_data[1] = number[show_number>>12 & 0x000F]; //SPI传输函数,参数为使用的SPI通道、要传输的数据、数据长度、超时时间HAL_SPI_Transmit(&hspi2,which_where_data,2,10); //进行锁存操作,等效于写入一高一低电平HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,GPIO_PIN_SET);HAL_Delay(1);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,GPIO_PIN_RESET);
choose = 0; //移动循环break;}
}
/* USER CODE END 0 */
软件SPI
1.先配置引脚为输出模式

2.右键改名字

改成如下

/* USER CODE BEGIN 0 */
void led_dispaly (uint8_t Bit,uint8_t Seg)//0x01 0x66 第一个管写4
{
int i=0;
for(i=0;i<8;i++)
{
HAL_GPIO_WritePin(GPIOB,SPI2_SCK_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, SPI2_MOSI_Pin, (Bit & 0x80) ? 1 : 0);
HAL_GPIO_WritePin(GPIOB,SPI2_SCK_Pin,GPIO_PIN_SET);Bit<<=1;
HAL_Delay(1);
}
for(i=0;i<8;i++)
{
HAL_GPIO_WritePin(GPIOB,SPI2_SCK_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, SPI2_MOSI_Pin, (Seg & 0x80) ? 1 : 0);
HAL_GPIO_WritePin(GPIOB,SPI2_SCK_Pin,GPIO_PIN_SET);
Seg<<=1;
HAL_Delay(1);
}
HAL_GPIO_WritePin(GPIOB, SPI2_NSS_Pin, 0);
HAL_Delay(1);
HAL_GPIO_WritePin(GPIOB, SPI2_NSS_Pin, 1);
}/* USER CODE END 0 */
作业:
通过串口发送相应的数字来控制数码管的输出,个位数
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "spi.h"
#include "usart.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include<stdlib.h>
#include<string.h>
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void SystemPower_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//**
* @brief The application entry point.
* @retval int
*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* Configure the System Power */SystemPower_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_SPI2_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 */char buf[5]={0};uint8_t i=0;const uint8_t number[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; //数字显示uint8_t shi=0;uint8_t gewei=0; uint8_t send[2]={0};/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */HAL_UART_Receive(&huart1,buf,5,8);//每次运行到此处,等3ms看看有没有数据发送过来
i=atoi(buf);//取出i的十位和个位
shi=i/10;
gewei=i%10;//将十位显示在1号管0x01
send[0]=0x01; // 0001
send[1]=number[shi];HAL_SPI_Transmit(&hspi2,send,2,100);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,0);HAL_Delay(1);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,1);//将个位显示在2号管0x02
send[0]=0x02;
send[1]=number[gewei];HAL_SPI_Transmit(&hspi2,send,2,100);//向74HC595串行输出HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,0);//产生上升沿,并行输出HAL_Delay(1);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,1);}/* USER CODE END 3 */
}/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Configure the main internal regulator output voltage
*/if (HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE4) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_MSI;
RCC_OscInitStruct.MSIState = RCC_MSI_ON;
RCC_OscInitStruct.MSICalibrationValue = RCC_MSICALIBRATION_DEFAULT;
RCC_OscInitStruct.MSIClockRange = RCC_MSIRANGE_4;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2|RCC_CLOCKTYPE_PCLK3;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_MSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB3CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK){Error_Handler();}
}/**
* @brief Power Configuration
* @retval None
*/
static void SystemPower_Config(void)
{/*
* Disable the internal Pull-Up in Dead Battery pins of UCPD peripheral
*/HAL_PWREx_DisableUCPDDeadBattery();
/* USER CODE BEGIN PWR */
/* USER CODE END PWR */
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */key1来控制数码管的数字显示,按一下+1,大于15归零

/* USER CODE BEGIN 2 */uint8_t i=0;const uint8_t number[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; //数字显示uint8_t shi=0;uint8_t gewei=0; uint8_t send[2]={0};/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */if(HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_9)==0){while(!HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_9));
i++;if(i>15){
i=0;}}//取出i的十位和个位
shi=i/10;
gewei=i%10;//将十位显示在1号管0x01
send[0]=0x01; // 0001
send[1]=number[shi];HAL_SPI_Transmit(&hspi2,send,2,100);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,0);HAL_Delay(1);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,1);//将个位显示在2号管0x02
send[0]=0x02;
send[1]=number[gewei];HAL_SPI_Transmit(&hspi2,send,2,100);//向74HC595串行输出HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,0);//产生上升沿,并行输出HAL_Delay(1);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_12,1);}
相关文章:
day05(单片机)SPI+数码管
目录 SPI数码管 SPI通信 SPI总线介绍 字节交换原理 时序单元 SPI模式 模式0 模式1 模式2 模式3 数码管 介绍 74HC595芯片分析 原理图分析 cubeMX配置 程序编写 硬件SPI 软件SPI 作业: SPI数…...

Android Framework AMS(13)广播组件分析-4(LocalBroadcastManager注册/注销/广播发送处理流程解读)
该系列文章总纲链接:专题总纲目录 Android Framework 总纲 本章关键点总结 & 说明: 说明:本章节主要解读广播组件的广播发送过程。关注思维导图中左上侧部分即可。 有了前面普通广播组件 注册/注销程/广播组件的发送广播流程分析的基础&…...

模糊理论与模糊集概述
1. 模糊集 1️⃣ μ A : U → [ 0 , 1 ] \mu_A:U\to{[0,1]} μA:U→[0,1],将任意 u ∈ U u\in{}U u∈U映射到 [ 0 , 1 ] [0,1] [0,1]上的某个函数 模糊集: A { μ A ( u ) , u ∈ U } A\{\mu_A(u),u\in{}U\} A{μA(u),u∈U}称为 U U U上的一个模糊集…...

基于STM32的实时时钟(RTC)教学
引言 实时时钟(RTC)是微控制器中的一种重要功能,能够持续跟踪当前时间和日期。在许多应用中,RTC用于记录时间戳、定时操作等。本文将指导您如何使用STM32开发板实现RTC功能,通过示例代码实现当前时间的读取和显示。 环…...

Caffeine Cache解析(三):BoundedBuffer 与 MpscGrowableArrayQueue 源码浅析
接续 Caffeine Cache解析(一):接口设计与TinyLFU 接续 Caffeine Cache解析(二):drainStatus多线程状态流转 BoundedBuffer 与 MpscGrowableArrayQueue multiple-producer / single-consumer 这里multiple和single指的是并发数量 BoundedBuffer: Caf…...

全双工通信协议WebSocket——使用WebSocket实现智能学习助手/聊天室功能
一.什么是WebSocket? WebSocket是基于TCP的一种新的网络协议。它实现了浏览器与服务器的全双工通信——浏览器和服务器只需要完成一次握手,两者之间就可以创建持久性的连接,并进行双向数据传输 HTTP 协议是一种无状态的、无连接的、单向的应用…...

Rust-Trait 特征编程
昨夜江边春水生,艨艟巨舰一毛轻。 向来枉费推移力,此日中流自在行。 ——《活水亭观书有感二首其二》宋朱熹 【哲理】往日舟大水浅,众人使劲推船,也是白费力气,而此时春水猛涨,巨舰却自由自在地飘行在水流中…...
彻底理解哈希表(HashTable)结构
目录 介绍优缺点概念哈希函数快速的计算键类型键转索引霍纳法则 均匀的分布 哈希冲突链地址法开放地址法线性探测二次探测再哈希法 扩容/缩容实现哈希创建哈希表质数判断哈希函数插入&修改获取数据删除数据扩容/缩容函数全部代码 哈希表(Hash Table)…...

微信小程序的汽车维修预约管理系统
文章目录 项目介绍具体实现截图技术介绍mvc设计模式小程序框架以及目录结构介绍错误处理和异常处理java类核心代码部分展示详细视频演示源码获取 项目介绍 系统功能简述 前台用于实现用户在页面上的各种操作,同时在个人中心显示各种操作所产生的记录:后…...
)
LeetCode:3255. 长度为 K 的子数组的能量值 II(模拟 Java)
目录 3255. 长度为 K 的子数组的能量值 II 题目描述: 实现代码与解析: 模拟 原理思路: 3255. 长度为 K 的子数组的能量值 II 题目描述: 给你一个长度为 n 的整数数组 nums 和一个正整数 k 。 一个数组的 能量值 定义为&am…...

深入了解逻辑回归:机器学习中的经典算法
✅作者简介:2022年博客新星 第八。热爱国学的Java后端开发者,修心和技术同步精进。 🍎个人主页:Java Fans的博客 🍊个人信条:不迁怒,不贰过。小知识,大智慧。 💞当前专栏…...
)
软件测试基础十三(python 函数)
函数 1. 函数的意义 代码复用 提高效率:Python中的函数允许将一段可重复使用的代码封装起来。例如,在一个数据分析项目中,可能需要多次计算一组数据的平均值。可以将计算平均值的代码定义为一个函数: def calculate_average(nu…...
计算机网络——HTTP篇
基础篇 IOS七层网络模型 TCP/IP四层模型? 应⽤层:位于传输层之上,主要提供两个终端设备上的应⽤程序之间的通信,它定义了信息交换的格式,消息会交给下⼀层传输层来传输。 传输层的主要任务就是负责向两台设备进程之间…...

信息化运维方案,实施方案,开发方案,信息中心安全运维资料(软件资料word)
1 编制目的 2 系统运行维护 2.1 系统运维内容 2.2 日常运行维护方案 2.2.1 日常巡检 2.2.2 状态监控 2.2.3 系统优化 2.2.4 软件系统问题处理及升级 2.2.5 系统数据库管理维护 2.2.6 灾难恢复 2.3 应急运行维护方案 2.3.1 启动应急流程 2.3.2 成立应急小组 2.3.3 应急处理过程 …...
自动化工具 Gulp
自动化工具 gulp 摘要 概念:gulp用于自动化开发流程。 理解:我们只需要编写任务,然后gulp帮我们执行 核心概念: 任务:通过定义不同的任务来组织你的构建流程。 管道:通过管道方式将文件从一个插件传递…...

css实现div被图片撑开
固定好盒子的宽度,高度随传过来的图片大小决定 <div class"tab-con"> <img:src"concertInfo.detail"alt""> </div>.tab-con {margin-bottom: 20px;width: 700px;img {width: 700px;height: auto;object-fit: cont…...
)
Power Pivot、Power BI 和 SQL Server Analysis Services 的公式语言:DAX(数据分析表达式)
DAX(Data Analysis Expressions)是一种用于 Power Pivot、Power BI 和 SQL Server Analysis Services 的公式语言,旨在帮助用户进行数据建模和复杂计算。DAX 的设计初衷是使数据分析变得简单而高效,特别是在处理数据模型中的表关系…...

大模型应用编排工具Dify二开之工具和模型页面改造
1.前言 简要介绍下 dify: 一款可以对接市面上主流大模型的任务编排工具,可以通过拖拽形式进行编排形成解决某些业务场景的大模型应用。 背景信息: 环境:dify-0.8.3、docker-21 最近笔者在做 dify的私有化部署和二次…...

Pytorch用BERT对CoLA、新闻组文本数据集自然语言处理NLP:主题分类建模微调可视化分析...
原文链接:https://tecdat.cn/?p38181 自然语言处理(NLP)领域在近年来发展迅猛,尤其是预训练模型的出现带来了重大变革。其中,BERT 模型凭借其卓越性能备受瞩目。然而,对于许多研究者而言,如何高…...

LightGBM-GPU不能装在WSL,能装在windows上
这是一篇经验总结文章,注重思路,忽略细节。 1.起因 用多个机器学习方法训练模型,比较性能,发现Light GBM方法获得的性能明显更高,但问题是在CPU上训练的速度特别特别慢,需要用GPU训练。 2.开始装LightGB…...
)
别再踩坑了!手把手教你解决RPM安装时的‘事务锁定’报错(附spec文件编写避坑指南)
RPM事务锁定的深度解析与实战避坑指南 在Linux系统管理中,RPM包管理器的"事务锁定"错误堪称开发者和管理员的噩梦。当你精心编写的spec文件在关键时刻抛出cant create transaction lock错误时,那种挫败感足以让任何技术专家抓狂。本文将带你深…...

CTF新手必看:一张图里藏了啥?手把手教你用010 Editor秒解BUUCTF图片隐写题
CTF新手入门:从图片隐写题中快速提取Flag的实战指南 当你第一次接触CTF比赛中的图片隐写题时,可能会感到无从下手。那些看似普通的图片背后,往往藏着关键的Flag信息。本文将带你一步步破解BUUCTF平台上的典型图片隐写题,使用010 E…...

SEM教程丨如何用“场景词”突围,月揽165个询盘?
很多工业设备老板觉得SEM就是“谁出价高谁就赢”,结果往往是钱烧了一大堆,机器没卖出去几台。今天我们要复盘的是某食品安检设备公司的实操案例,看看它是如何摆脱“无效烧钱”,稳稳拿下月均165个精准咨询的 🍎。 一、 …...

pdfjs 进阶:基于外部数据切片实现精准高亮与定位跳转
1. 理解PDF.js与外部数据切片的核心需求 在文档处理场景中,我们经常遇到这样的需求:后端已经将PDF内容切割成结构化的数据块(比如按章节、段落或语义单元划分),前端需要将这些数据块与PDF可视化内容精准关联。这种关联…...

别再死记硬背了!用这5个真实案例,彻底搞懂NumPy的einsum函数
别再死记硬背了!用这5个真实案例,彻底搞懂NumPy的einsum函数 当你第一次看到np.einsum(ij,jk->ik, A, B)这样的表达式时,是不是感觉像在破译外星密码?作为NumPy中最强大却也最令人困惑的函数之一,einsum(…...

炸了!Claude 更新后 Mac 老系统直接报废:开发者凌晨三点爬起来修环境
一、真实事故现场:上海某团队的惊魂一夜 2026年5月15日凌晨2:37,上海浦东某科技公司。 高级工程师小李盯着屏幕上的错误信息,手指在键盘上飞快地敲击着。他面前是三个显示器,每个都显示着不同的终端窗口,满屏的红色错误信息像血一样刺眼。 "这怎么可能?"他自…...

最火的知识付费系统小程序+PC+H5三端数据互通支持采集资源开源版
内容目录一、详细介绍二、效果展示1.部分代码2.效果图展示三、学习资料下载一、详细介绍 系统含带 裂变模式 可以助力好友来获取资源共享 分站功能 独立后台 会员功能 卡密功能 二级分销功能等 自行研究看 后期有更新新版会在持续发布 目前版本是3.5 是我花三天时间修复的 好多…...

如何打破课堂限制?JiYuTrainer让您的电脑重获自由
如何打破课堂限制?JiYuTrainer让您的电脑重获自由 【免费下载链接】JiYuTrainer 极域电子教室防控制软件, StudenMain.exe 破解 项目地址: https://gitcode.com/gh_mirrors/ji/JiYuTrainer 当您在计算机课堂上被极域电子教室完全控制时,是否感到学…...

终极AMD Ryzen调试工具SMUDebugTool:免费开源的硬件掌控神器
终极AMD Ryzen调试工具SMUDebugTool:免费开源的硬件掌控神器 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: http…...

5分钟学会在PowerPoint中插入LaTeX公式:科研工作者的高效神器
5分钟学会在PowerPoint中插入LaTeX公式:科研工作者的高效神器 【免费下载链接】latex-ppt Use LaTeX in PowerPoint 项目地址: https://gitcode.com/gh_mirrors/la/latex-ppt 还在为PowerPoint里输入复杂的数学公式而头疼吗?作为科研人员、教师或…...