Halcon 3D基础知识及常用函数
一、基本概念
1、点云(Point Cloud)
点云是一组3D数据点,每个点由笛卡尔坐标系或其他坐标系中的一个三维坐标表示,它被认为是一组非结构化的三维点,象征着三维物体的几何形状。点云是一种简单、完整的数据结构,消除了网格数据的复杂性。
2、位姿(Pose)
Halcon中的Pose是一个7参数元组,表示3D平移和旋转的组合。它可以描述一个坐标系相对于另一个坐标系的位置和方向,或者用于在不同坐标系间转换点坐标。Pose通过齐次变换矩阵实现刚性变换。一个pose是具有7个参数的元组:3个参数描述平移(TransX、TransY、TransZ),3个参数描述旋转(RotX、RotY、RotZ)。最后一个参数确定了平移和旋转的顺序(以及旋转的方向)。
3、深度图(Depth Map)
深度图就是从图像采集器到场景中各点的距离(深度)作为像素值的图像。像素值表示深度: 深度图的每个像素值代表场景中该点到摄像头或传感器的距离,通常用灰度值来表示。较亮的像素表示较近的物体,而较暗的像素则表示较远的物体。深度值可以是以毫米、米等单位测量的实际距离,或是相机坐标系中的相对距离。
- 相对深度:在某些情况下,深度图并不提供场景中物体的实际物理距离,而是提供一种相对深度信息,即物体间的相对远近。
- 绝对深度:这种深度图包含物体到传感器的真实物理距离,这对机器人导航、3D建模等精确应用至关重要。
深度图通常是单通道图像,不包含颜色信息。每个像素的值是一个浮点数或整数,代表场景中的深度。与RGB图像相比,深度图通常更强调几何信息,而非视觉纹理。
视角和投影: 深度图反映的是从摄像机或传感器视角下的距离,因此它通常依赖于特定的相机模型。不同视角或摄像机位置会产生不同的深度图。相机内参(如焦距、光心位置)和外参(相机在空间中的位置和方向)都会影响深度图的生成。
二、Halcon 3D基础函数
1)read_object_model_3d
功能:从文件读取一个3d模型。
参数说明:read_object_model_3d( : : FileName, Scale, GenParamName, GenParamValue : ObjectModel3D, Status)
FileName:要读取的点云文件名;
Scale:文件中数据的缩放因子;
ObjModel3D:输出 3D对象模型句柄;
Status:输出状态信息;
2)visualize_object_model_3d
功能:用于显示3d模型。该函数功能很多,包括设置位姿,颜色,鼠标翻转、缩放、平移,选择和取消选择目标,降低鼠标灵敏度,切换检查模式等。
参数说明:visualize_object_model_3d( : : WindowHandle, ObjectModel3D, CamParam, PoseIn, GenParamName, GenParamValue, Title, Label, Information : PoseOut)
WindowHandle:窗体句柄。
ObjectModel3D:3d模型。
CamParam:相机参数
PoseIn:初始位姿。
PoseOut:用户调整模型姿态后输出这个3d姿态。
3)surface_normals_object_model_3d
功能:用于计算三维物体模型的三维曲面法线。
参数说明:surface_normals_object_model_3d( : : ObjectModel3D, Method, GenParamName, GenParamValue : ObjectModel3DNormals)
: : ObjectModel3D:包含3D点数据的3D对象模型句柄。
Method:法线计算方法。默认值:‘mls’。
GenParamName:一般平滑参数的名称。值列表:‘mls_abs_sigma’, ‘mls_force_inwards’, ‘mls_kNN’, ‘mls_order’, ‘mls_relative_sigma’。
GenParamValue :一般平滑参数的值。。
ObjectModel3DNormals:具有计算出的三维法线的三维对象模型的句柄。
4)smooth_object_model_3d
功能:用于平滑3D对象模型的3D点。
参数说明:smooth_object_model_3d( : : ObjectModel3D, Method, GenParamName, GenParamValue : SmoothObjectModel3D)
: : ObjectModel3D:包含3D点数据的3D对象模型句柄。
Method:法线计算方法。默认值:‘mls’。
GenParamName:一般平滑参数的名称。值列表:“ mls_abs_sigma”,“ mls_force_inwards”,“ mls_kNN”,“ mls_order”,“ mls_relative_sigma”
SmoothObjectModel3D:带有光滑的三维点数据的三维对象模型的句柄。
5)triangulate_object_model_3d
功能:为三维对象模型创建曲面三角剖分。
参数说明:triangulate_object_model_3d( : : ObjectModel3D, Method, GenParamName, GenParamValue : TriangulatedObjectModel3D, Information)
: : ObjectModel3D:包含3D点数据的3D对象模型句柄。
Method:三角化方法。包括:'greedy', 'implicit', 'polygon_triangulation', 'xyz_mapping' GenParamName: 三角化参数名称。 GenParamValue:三角化参数值。
TriangulatedObjectModel3D:三角化处理后的3D模型;
Information:三角化过程的其他信息。
6)create_surface_model
功能:用于创建3D对象模型的表面匹配模型。内容涉及模型创建、参数设置、采样距离、边缘支持、基于视图的分数计算以及对噪声数据的处理,强调了法线方向和模型质量对匹配稳定性的影响。
参数说明:create_surface_model( : : ObjectModel3D, RelSamplingDistance, GenParamName, GenParamValue : SurfaceModelID)
: : ObjectModel3D:包含3D点数据的3D对象模型句柄。
RelSamplingDistance:相对于物体直径的采样距离。
GenParamName:通用参数的名称。
GenParamValue:通用参数的值。
SurfaceModelID:表面模型的句柄。
7)create_pose
功能:创建3D位姿;
参数说明:create_pose( : : TransX, TransY, TransZ, RotX, RotY, RotZ, OrderOfTransform, OrderOfRotation, ViewOfTransform : Pose)
: : TransX, TransY, TransZ:指定沿x轴,y轴和z轴的平移;
RotX, RotY, RotZ:指定绕x轴,y轴和z轴的旋转;
OrderOfTransform:选择平移方式。
OrderOfRotation:选择旋转方式。
ViewOfTransform:变换的视角。
Pose:三维姿态。输出为一个包含7个元素的 pose,通常表示为 [Tx, Ty, Tz, Rx, Ry, Rz, Order],其中 Tx, Ty, Tz 为平移分量,Rx, Ry, Rz 为旋转分量,Order 为旋转顺序。
8)gen_plane_object_model_3d
功能:创建表示平面的三维对象模型;
参数说明:gen_plane_object_model_3d( : : Pose, XExtent, YExtent : ObjectModel3D)
: : Pose:平面的位姿;输入平面的中心和旋转;元素数量: Pose == 7
XExtent:指定平面范围的x坐标;
YExtent: 指定平面范围y坐标;
ObjectModel3D:3D模型结果;
9)intersect_plane_object_model_3d
功能:将三维对象模型与平面相交。
参数说明:intersect_plane_object_model_3d( : : ObjectModel3D, Plane : ObjectModel3DIntersection)
: : ObjectModel3D:三维对象模型
Plane :带姿态的平面;
ObjectModel3DIntersection: 将交点描述为一组线的三维对象模型的句柄。
相关文章:

Halcon 3D基础知识及常用函数
一、基本概念 1、点云(Point Cloud) 点云是一组3D数据点,每个点由笛卡尔坐标系或其他坐标系中的一个三维坐标表示,它被认为是一组非结构化的三维点,象征着三维物体的几何形状。点云是一种简单、完整的数据结构&#…...

贵金属铟,钌,铱,钯铂铑回收工艺详解
Tulsimer CH-95S 是一款为了从工业废水中去除回收汞和贵金属而专门开发的螯合树脂。 Tulsimer CH-95S 是一款拥有聚乙烯异硫脲官能基的大孔树脂,这种树脂对汞有极高的选择性。它也选 择其他的贵金属,如黄金,铂金和其他铂金族金属。…...

AutoSAR CP RTE 规范核心内容简介以及BswScheduler工作原理解析
一、Autosar CP RTE规范核心内容简介 本规范详细介绍了AUTOSAR运行时环境(RTE)和基本软件调度器(BswScheduler)的软件规范。 研究背景 背景介绍: 这篇文章的研究背景是AUTOSAR(Automotive Open System Architecture…...

Python Pyside6 加Sqlite3 写一个 通用 进销存 系统 初型
图: 说明: 进销存管理系统说明文档 功能模块 1. 首页 显示关键业务数据商品总数供应商总数本月采购金额本月销售金额显示预警信息库存不足预警待付款采购单待收款销售单2. 商品管理 商品信息维护商品编码(唯一标识)商品名称规格型号单位分类进货价销售价库存数量预警…...
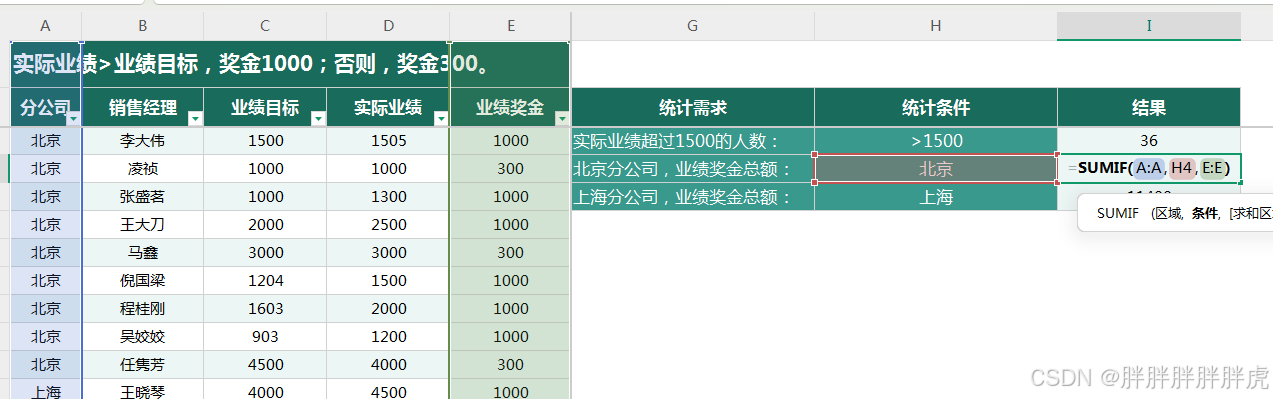
office 学习
Excel 视图 切片 通过视图进行数据分析 条形格式 函数 countif sumif sumifs 多条件 countifs 多条件...

【三维分割】Gaga:通过3D感知的 Memory Bank 分组任意高斯
文章目录 摘要一、引言二、主要方法2.1 3D-aware Memory Bank2.2 三维分割的渲染与下游应用 三、实验消融实验应用: Scene Manipulation 地址:https://www.gaga.gallery 标题:Gaga: Group Any Gaussians via 3D-aware Memory Bank 来源:加利福…...

期权懂|明日股指期货交割日该如何操作?
锦鲤三三每日分享期权知识,帮助期权新手及时有效地掌握即市趋势与新资讯! 明日股指期货交割日该如何操作? 一、需要确认股指期货交割日: 查查看明日是否为交割日,别忘了关注交易所公告,以免错过。 二、需要…...

大牙的2024年创作总结
文章目录 一、自动驾驶通讯协议的学习心得二、PyTorch框架应用的心得体会三、大规模语言模型(LLM)的研究心得四、神经网络架构与实战经验五、我的年度文章六、未来展望与个人成长 引言 2024年是我个人在深度学习和自动驾驶领域不断探索、实践并取得显著…...

AI软件栈:中间表示
概念 编译器通常可以分为前端、优化器和后端三个部分中间表示属于变异过程中表达源程序的方法,作为单独的表示语言。将不同的前端语言(例如C、python、Java等)描述转换为中间表示。优化器对中间表示进行转换和优化,输出新的中间表示。后端将优化后的中间表示转换为特定硬件…...

【PowerQuery专栏】PowerQuery的M语言函数Access数据库访问
Access是相对比较小型的文件型数据库,PowerQuery 进行Access数据库解析非常简单,直接使用Access.Database的函数可以实现数据库访问,函数包含如下参数,函数结果为Table表类型。 Access.Database(参数1 as binary,参数2 as record) as Table 参数1为数据库,数据类型为二进…...

C# OpenCvSharp 部署文档矫正,包括文档扭曲/模糊/阴影等情况
目录 说明 效果 模型 项目 代码 下载 参考 C# OpenCvSharp 部署文档矫正,包括文档扭曲/模糊/阴影等情况 说明 地址:https://github.com/RapidAI/RapidUnDistort 修正文档扭曲/模糊/阴影等情况,使用onnx模型简单轻量部署,…...

go读取excel游戏配置
1.背景 游戏服务器,配置数据一般采用csv/excel来作为载体,这种方式,策划同学配置方便,服务器解析也方便。在jforgame框架里,我们使用以下的excel配置格式。 然后可以非常方便的进行数据检索,例如ÿ…...

特殊类设计
[本节目标] 掌握常见特殊类的设计方式 1.请设计一个类,不能被拷贝 拷贝只会放生在两个场景中:拷贝构造函数以及赋值运算符重载,因此想要让一个类禁止拷贝,只需让该类不能调用拷贝构造函数以及赋值运算符重载即可。 C98 将拷贝构…...

图像去雾数据集的下载和预处理操作
前言 目前,因为要做对比实验,收集了一下去雾数据集,并且建立了一个数据集的预处理工程。 这是以前我写的一个小仓库,我决定还是把它用起来,下面将展示下载的路径和数据处理的方法。 下面的代码均可以在此找到。Auo…...
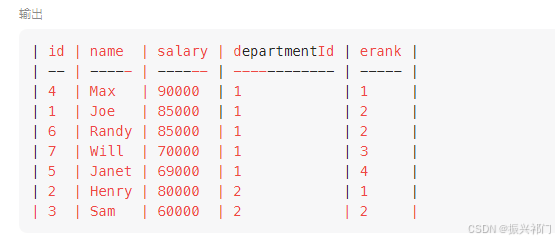
【LeetCode】--- MySQL刷题集合
1.组合两个表(外连接) select p.firstName,p.lastName,a.city,a.state from Person p left join Address a on p.personId a.personId; 以左边表为基准,去连接右边的表。取两表的交集和左表的全集 2.第二高的薪水 (子查询、if…...

基于Python的多元医疗知识图谱构建与应用研究(上)
一、引言 1.1 研究背景与意义 在当今数智化时代,医疗数据呈爆发式增长,如何高效管理和利用这些数据,成为提升医疗服务质量的关键。传统医疗数据管理方式存在数据孤岛、信息整合困难等问题,难以满足现代医疗对精准诊断和个性化治疗的需求。知识图谱作为一种知识表示和管理…...

小哆啦解题记:如何计算除自身以外数组的乘积
小哆啦开始力扣每日一题的第十二天 https://leetcode.cn/problems/product-of-array-except-self/description/ 《小哆啦解题记:如何计算除自身以外数组的乘积》 在一个清晨的阳光下,小哆啦坐在书桌前,思索着一道困扰已久的题目:…...

渐进式图片的实现原理
渐进式图片(Progressive JPEG)的实现原理与传统的基线 JPEG(Baseline JPEG)不同。它通过改变图片的编码和加载方式,使得图片在加载时能够逐步显示从模糊到清晰的图像。 1. 传统基线 JPEG 的加载方式 在传统的基线 JP…...
)
SQL刷题快速入门(三)
其他章节: SQL刷题快速入门(一) SQL刷题快速入门(二) 承接前两个章节,本系列第三章节主要讲SQL中where和having的作用和区别、 GROUP BY和ORDER BY作用和区别、表与表之间的连接操作(重点&…...

mybatis(19/134)
大致了解了一下工具类,自己手敲了一边,java的封装还是真的省去了很多麻烦,封装成一个工具类就可以不用写很多重复的步骤,一个工厂对应一个数据库一个environment就好了。 mybatis中调用sql中的delete占位符里面需要有字符…...

FCEUX终极指南:从怀旧游戏到专业调试的完整NES模拟器教程
FCEUX终极指南:从怀旧游戏到专业调试的完整NES模拟器教程 【免费下载链接】fceux FCEUX, a NES Emulator 项目地址: https://gitcode.com/gh_mirrors/fc/fceux FCEUX是一款功能强大的开源NES模拟器,让你在现代电脑上完美重温经典红白机游戏。无论…...

除了ulimit -c unlimited:深入理解Linux core dump机制与高级配置指南
深入Linux核心转储:从基础配置到生产环境实战指南当服务器上的关键应用突然崩溃时,系统管理员最需要的就是一份完整的"事故现场记录"。Linux的core dump机制正是为此而生,它能保存程序崩溃时的内存状态、寄存器值和调用堆栈&#x…...

【CP-05】RTE运行时环境 - SWC的操作系统接口
CP-05_RTE运行时环境【CP-05】RTE运行时环境 - SWC的“操作系统接口”前言在AUTOSAR架构中,RTE(Runtime Environment,运行时环境)是一个常被提及却难以理解的概念。它像是应用层软件组件(SW-C)与底层基础软…...

微信小程序3D开发框架技术对比:XR-Frame与threejs-miniprogram
随着微信小程序逐步支持3D渲染与AR能力,开发者面临两个主要官方方案:自研的XR-Frame和适配Three.js的threejs-miniprogram。本文将从架构设计、渲染机制、功能集成、开发模式及适用场景等维度进行技术分析,为技术选型提供参考。一、XR-Frame&…...

FM3773 低功耗离线式恒流/恒压 PSR 控制器
概述 FM3773 是一种高性能的交流/直流用于电池充电器和适配器的电源控制器,内置 850V 功率三极管。该设备采用脉冲频率调制(PFM)的方法来建立非连续导通模式(DCM)反激式电源。 FM3773 提供精确的恒定电压,恒…...

告别鼠标手!5分钟上手开源鼠标连点器MouseClick,轻松实现自动化点击
告别鼠标手!5分钟上手开源鼠标连点器MouseClick,轻松实现自动化点击 【免费下载链接】MouseClick 🖱️ MouseClick 🖱️ 是一款功能强大的鼠标连点器和管理工具,采用 QT Widget 开发 ,具备跨平台兼容性 。软…...

GEO生成引擎优化:当AI成为信息分发的主角,品牌如何抢占对话窗口?
当用户不再"搜索-浏览",而是直接"AI提问-获取答案",传统SEO的逻辑正在被彻底改写。2026年,GEO(Generative Engine Optimization,生成式引擎优化)已经从概念走向规模化落地。本文从技术…...

机器学习驱动储氢材料发现:从特征工程到DFT/MD验证的完整指南
1. 项目概述与核心思路氢能被视为未来清洁能源体系的关键一环,但如何安全、高效、经济地储存氢气,一直是制约其大规模应用的瓶颈。在众多储氢技术路线中,固态储氢,特别是基于金属氢化物的储氢材料,因其高体积储氢密度和…...

Performance-Fish:让你的《环世界》后期游戏帧率提升400%的终极优化方案
Performance-Fish:让你的《环世界》后期游戏帧率提升400%的终极优化方案 【免费下载链接】Performance-Fish Performance Mod for RimWorld 项目地址: https://gitcode.com/gh_mirrors/pe/Performance-Fish 你是否曾在《环世界》游戏后期,面对庞大…...

Matlab,plot绘图如何添加边框
matlab生成的图——编辑(E)——坐标区属性(A)——框样式——Box,勾选效果:...