STM32 PWM驱动舵机
接线图:
这里将信号线连接到了开发板的PA1上

代码配置:
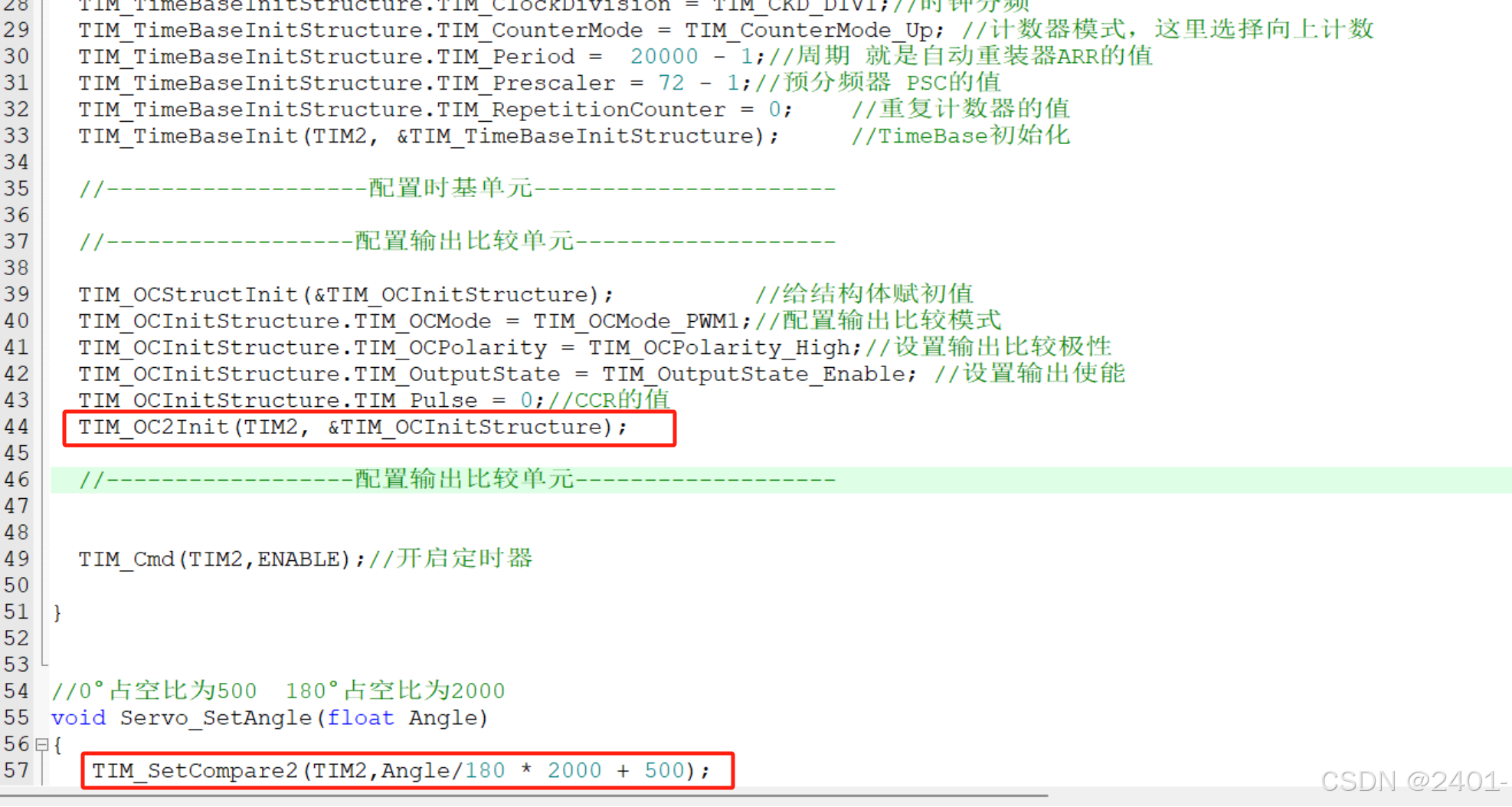
这里的PWM配置与呼吸灯一样,呼吸灯连接的是PA0引脚,输出比较单元用的是OC1通道,这里只需改为OC2通道即可。
完整代码:
#include "servo.h"void servo_Init(void)
{//-----------------定义结构体变量----------------------GPIO_InitTypeDef GPIO_InitStructure; //定义GPIO结构体变量TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;//定义TimeBase结构体变量TIM_OCInitTypeDef TIM_OCInitStructure; //定义OC结构体变量//-----------------定义结构体变量----------------------//配置时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//打开GPIO时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//打开TIM2时钟//-----------------配置GPIO----------------------------GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//选择复用推挽模式GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //配置引脚GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速率GPIO_Init(GPIOA, &GPIO_InitStructure); //GPIO初始化//-----------------配置GPIO----------------------------//-------------------配置时基单元----------------------TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//时钟分频TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,这里选择向上计数TIM_TimeBaseInitStructure.TIM_Period = 20000 - 1;//周期 就是自动重装器ARR的值TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1;//预分频器 PSC的值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器的值TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //TimeBase初始化//-------------------配置时基单元----------------------//------------------配置输出比较单元-------------------TIM_OCStructInit(&TIM_OCInitStructure); //给结构体赋初值TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//配置输出比较模式TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//设置输出比较极性TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //设置输出使能TIM_OCInitStructure.TIM_Pulse = 0;//CCR的值TIM_OC2Init(TIM2, &TIM_OCInitStructure);//------------------配置输出比较单元-------------------TIM_Cmd(TIM2,ENABLE);//开启定时器}//0°占空比为500 180°占空比为2000
void Servo_SetAngle(float Angle)
{TIM_SetCompare2(TIM2,Angle/180 * 2000 + 500);}主函数:
实现了通过按键控制舵机
#include "Servo.h"
int main(void)
{LED_Init();OLED_Init();KEY_Init();servo_Init();uint16_t Angle = 0;OLED_ShowString(1, 1, "Angle:");while(1){if(KEY_Scanf(GPIOB,GPIO_Pin_1) == 1){Angle += 30;if(Angle >= 180){Angle = 0;}}Servo_SetAngle(Angle);OLED_ShowNum(1, 7, Angle, 3); } }相关文章:
STM32 PWM驱动舵机
接线图: 这里将信号线连接到了开发板的PA1上 代码配置: 这里的PWM配置与呼吸灯一样,呼吸灯连接的是PA0引脚,输出比较单元用的是OC1通道,这里只需改为OC2通道即可。 完整代码: #include "servo.h&quo…...

设计心得——平衡和冗余
一、平衡 在前面分析了一些软件设计的基础和原则后,今天分析一下整体设计上的一些实践问题。首先分析一下设计上的平衡问题。平衡非常好理解,看到过天平或者标称的同学们应该都知道什么平衡。无论在哪个环境里,平衡都是稳定的基础。 既然说到…...

webrtc协议详细解释
### 一、概述与背景 WebRTC(Web Real-Time Communication)最早由 Google 在 2011 年开源,旨在为浏览器与移动端应用提供客户端直连(点对点)方式进行实时音视频及数据传输的能力。传统的网络应用在进行高实时性音视频通…...
动手学强化学习(四)——蒙特卡洛方法
一、蒙特卡洛方法 蒙特卡洛方法是一种无模型(Model-Free)的强化学习算法,它通过直接与环境交互采样轨迹(episodes)来估计状态或动作的价值函数(Value Function),而不需要依赖环境动态…...
网络原理(3)—— 传输层详解
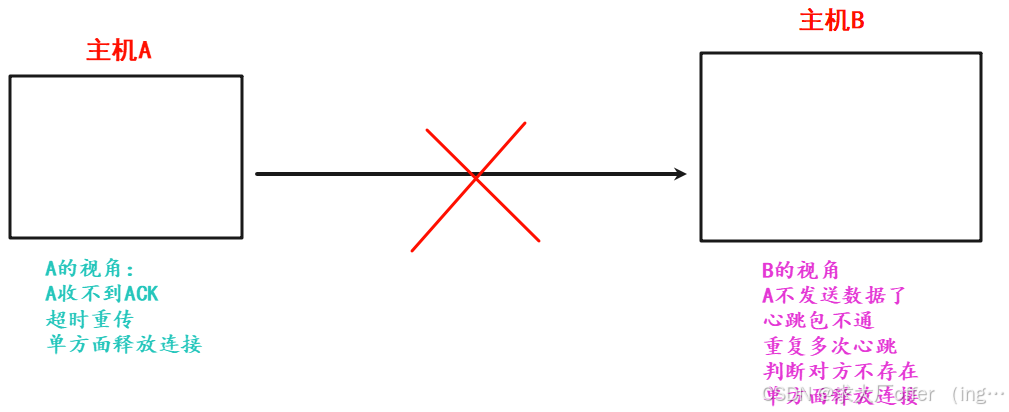
目录 一. 再谈端口号 二. UDP协议(用户数据报协议) 2.1 UDP协议端格式 2.2 UDP报文长度 2.3 UDP校验和 三. TCP协议(传输控制协议) 3.1 TCP协议段格式 3.2 核心机制 3.2.1 确认应答 —— “感知对方是否收到” 3.2.2 超时重传 3.3.3 连接管理 —— 三次握手与四…...
2025美赛美国大学生数学建模竞赛A题完整思路分析论文(43页)(含模型、可运行代码和运行结果)
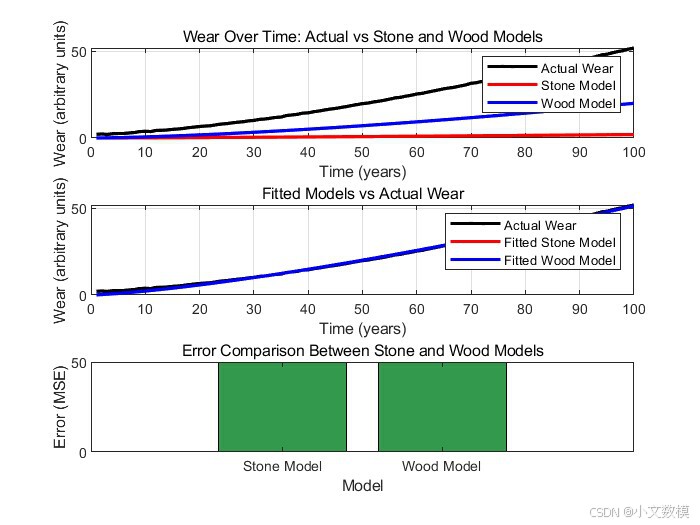
2025美国大学生数学建模竞赛A题完整思路分析论文 目录 摘要 一、问题重述 二、 问题分析 三、模型假设 四、 模型建立与求解 4.1问题1 4.1.1问题1思路分析 4.1.2问题1模型建立 4.1.3问题1样例代码(仅供参考) 4.1.4问题1样例代码运行结果&…...
Elasticsearch的开发工具(Dev Tools)
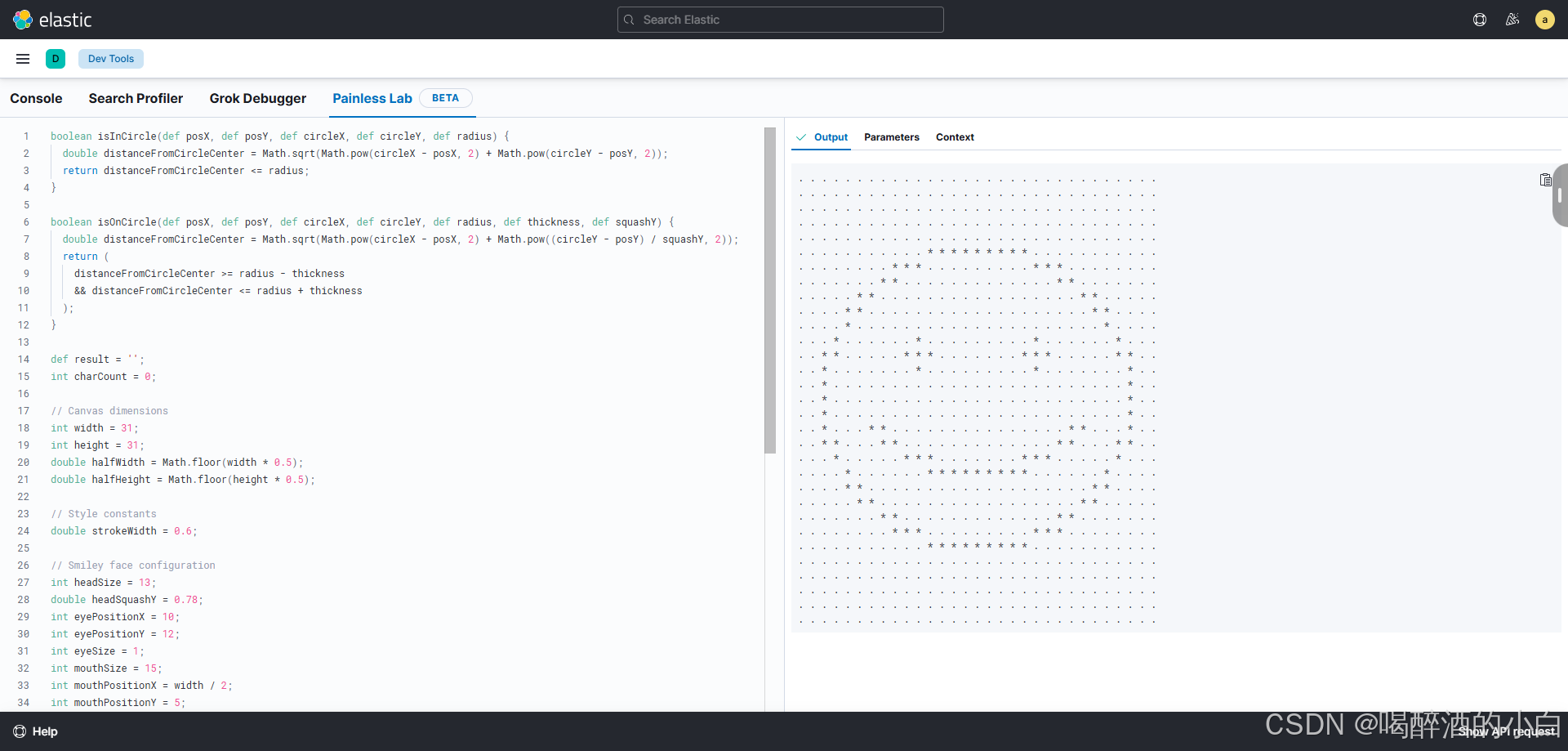
目录 说明1. **Console**2. **Search Profiler**3. **Grok Debugger**4. **Painless Lab**总结 说明 Elasticsearch的开发工具(Dev Tools)在Kibana中提供了多种功能强大的工具,用于调试、优化和测试Elasticsearch查询和脚本。以下是关于Cons…...

Python-基于PyQt5,pdf2docx,pathlib的PDF转Word工具
前言:日常生活中,我们常常会跟WPS Office打交道。作表格,写报告,写PPT......可以说,我们的生活已经离不开WPS Office了。与此同时,我们在这个过程中也会遇到各种各样的技术阻碍,例如部分软件的PDF转Word需要收取额外费用等。那么,可不可以自己开发一个小工具来实现PDF转…...
小程序-视图与逻辑
前言 1. 声明式导航 open-type"switchTab"如果没有写这个,因为是tabBar所以写这个,就无法跳转。路径开始也必须为斜线 open-type"navigate"这个可以不写 现在开始实现后退的效果 现在我们就在list页面里面实现后退 2.编程式导航…...
UE5制作视差图
双目深度估计开源数据集很多都是用UE制作的,那么我们自己能否通过UE制作自己想要的场景的数据集呢。最近花了点时间研究了一下,分享给需要的小伙伴。 主要使用的是UnrealCV插件,UnrealCV是一个开源项目,旨在帮助计算机视觉研究人…...

海浪波高预测(背景调研)
#新星杯14天创作挑战营第7期# ps:图片由通义千问生成 历史工作: 针对更高细粒度、更高精度的波浪高度预测任务: Mumtaz Ali 等人提出了一种多元线性回归模型(MLR-CWLS),该模型利用协方差加权最小二乘法&a…...

代码随想录算法训练营第四十二天-动态规划-股票-188.买卖股票的最佳时机IV
题目要求进行k次买卖其实就是上一题的扩展,把2次扩展为k次定义动规数组依然是二维,第一个维度表示第几天,第二个维度表示第几次买入和卖出所以第二个维度的长度应该是2k1在for循环内,要使用一个内循环来表示第几次买入或卖出&…...
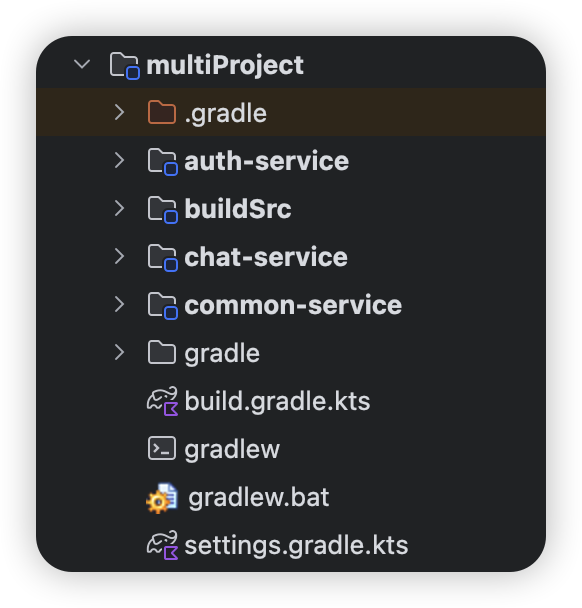
Gradle配置指南:深入解析settings.gradle.kts(Kotlin DSL版)
文章目录 Gradle配置指南:深入解析settings.gradle.kts(Kotlin DSL版)settings.gradle.kts 基础配置选项单项目配置多项目配置 高级配置选项插件管理(Plugin Management)基础配置模板案例:Android项目标准配…...
软件工程经济学-日常作业+大作业
目录 一、作业1 作业内容 解答 二、作业2 作业内容 解答 三、作业3 作业内容 解答 四、大作业 作业内容 解答 1.建立层次结构模型 (1)目标层 (2)准则层 (3)方案层 2.构造判断矩阵 (1)准则层判断矩阵 (2)方案层判断矩阵 3.层次单排序及其一致性检验 代码 …...
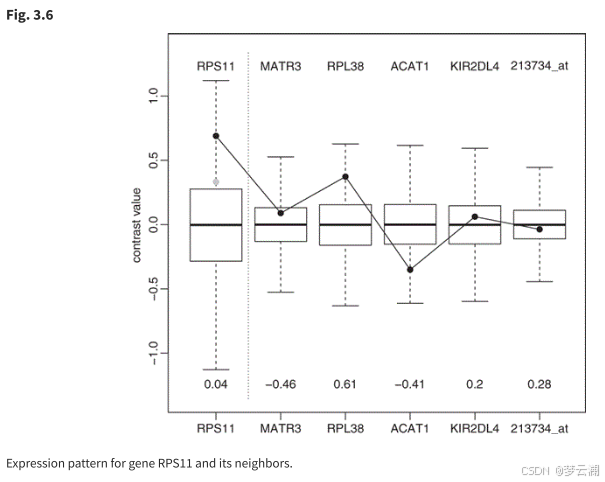
论文阅读(三):微阵列数据的图形模型和多变量分析
1.论文链接:Graphical Models and Multivariate Analysis of Microarray Data 摘要: 基因表达数据的通常分析忽略了基因表达值之间的相关性。从生物学上讲,这种假设是不合理的。本章介绍的方法允许通过稀疏高斯图形模型来描述基因之间的相关…...
【大模型LLM面试合集】大语言模型架构_MHA_MQA_GQA
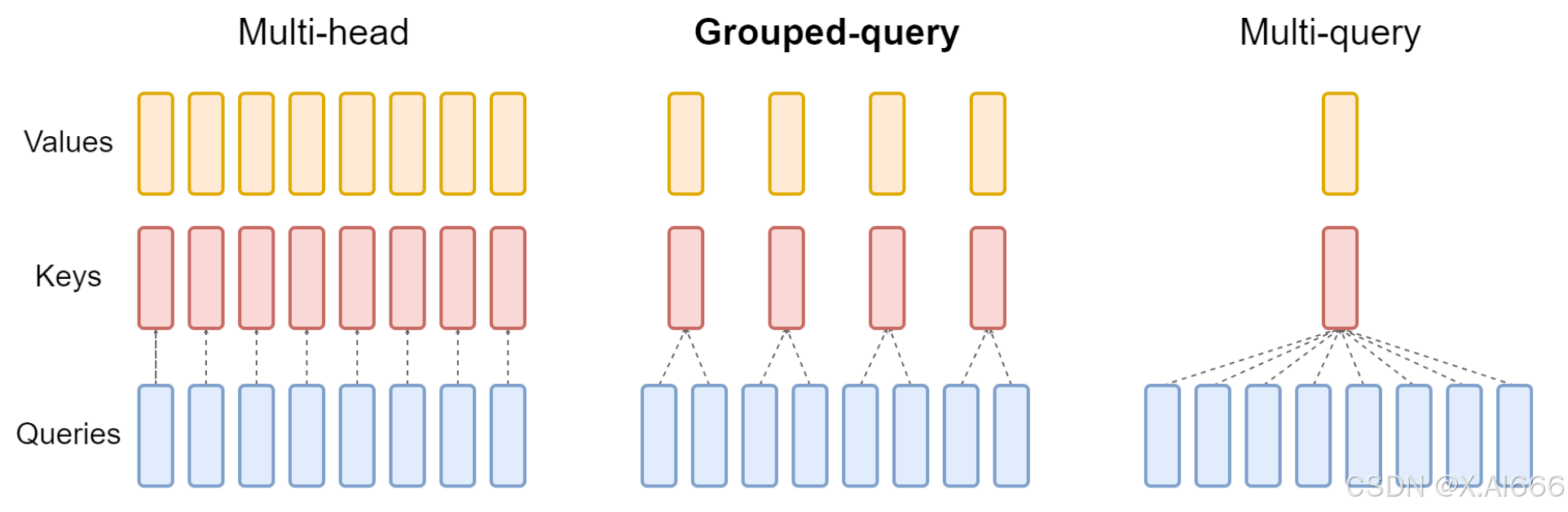
MHA_MQA_GQA 1.总结 在 MHA(Multi Head Attention) 中,每个头有自己单独的 key-value 对;标准的多头注意力机制,h个Query、Key 和 Value 矩阵。在 MQA(Multi Query Attention) 中只会有一组 k…...
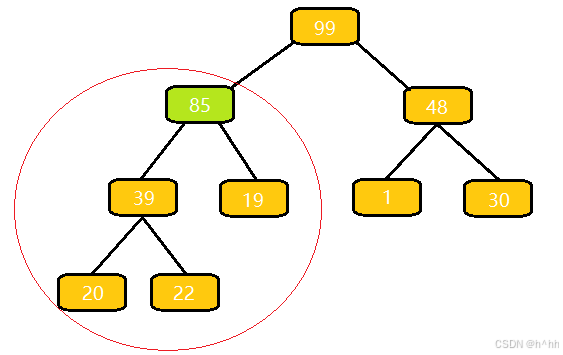
向上调整算法(详解)c++
算法流程: 与⽗结点的权值作⽐较,如果⽐它⼤,就与⽗亲交换; 交换完之后,重复 1 操作,直到⽐⽗亲⼩,或者换到根节点的位置 这里为什么插入85完后合法? 我们插入一个85,…...
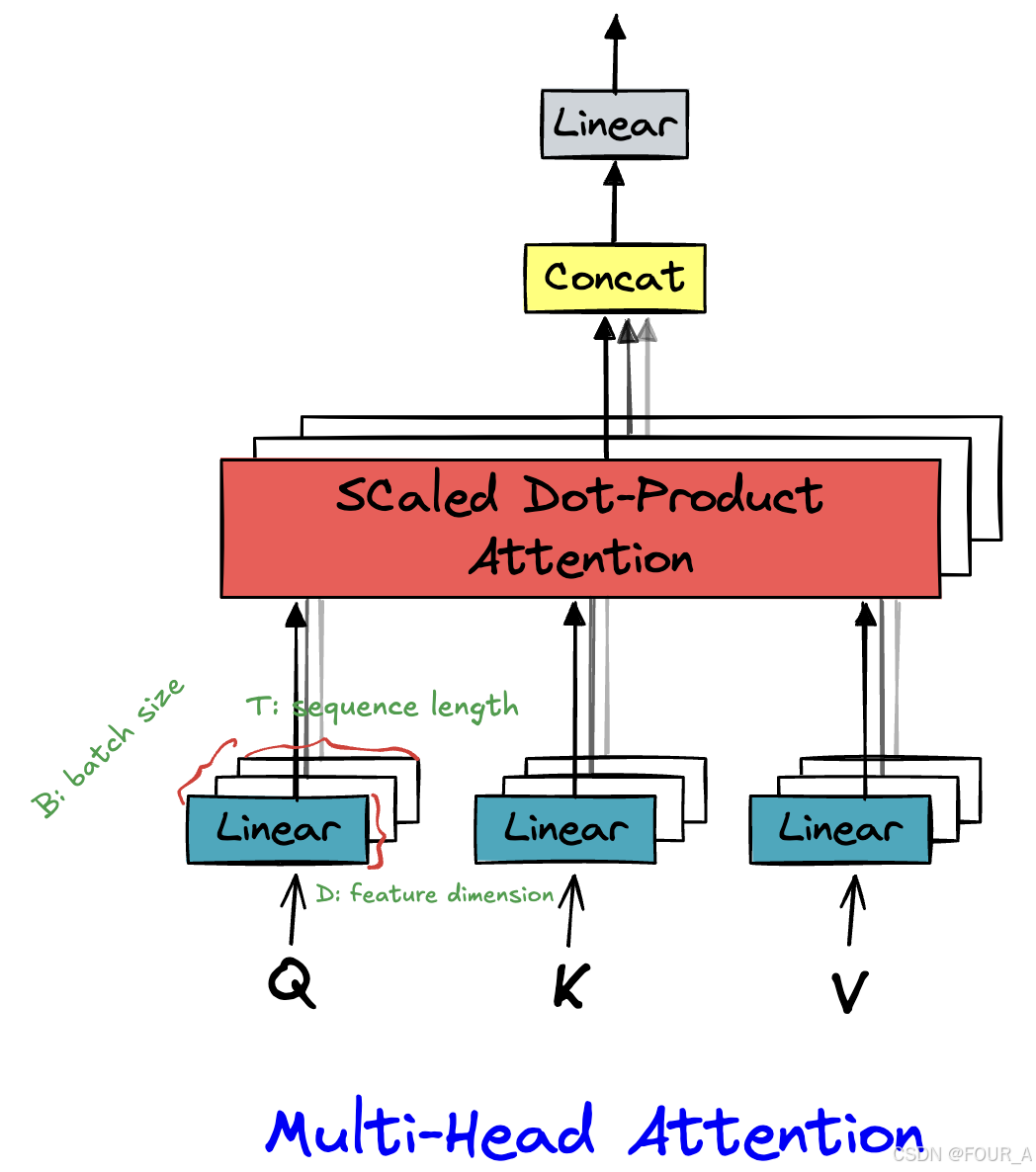
【Transformer】手撕Attention
import torch from torch import nn import torch.functional as F import mathX torch.randn(16,64,512) # B,T,Dd_model 512 # 模型的维度 n_head 8 # 注意力头的数量多头注意力机制 class multi_head_attention(nn.Module): def __init__(self, d_model, n_hea…...

844.比较含退格的字符串
目录 题目思路解法收获 题目 给定 s 和 t 两个字符串,当它们分别被输入到空白的文本编辑器后,如果两者相等,返回 true 。# 代表退格字符。 注意:如果对空文本输入退格字符,文本继续为空。 思路 如何解退格之后left…...

图书管理系统 Axios 源码__编辑图书
目录 功能概述: 代码实现(index.js): 代码解析: 图书管理系统中,删除图书功能是核心操作之一。下是基于 HTML、Bootstrap、JavaScript 和 Axios 实现的删除图书功能的详细介绍。 功能概述: …...

如何为《欧洲卡车模拟2》实现完整智能驾驶体验?ETS2LA自动驾驶插件终极指南
如何为《欧洲卡车模拟2》实现完整智能驾驶体验?ETS2LA自动驾驶插件终极指南 【免费下载链接】Euro-Truck-Simulator-2-Lane-Assist Plugin based interface program for ETS2/ATS. 项目地址: https://gitcode.com/gh_mirrors/eur/Euro-Truck-Simulator-2-Lane-Ass…...

OpenCore Legacy Patcher终极指南:让老Mac免费运行最新macOS的完整教程
OpenCore Legacy Patcher终极指南:让老Mac免费运行最新macOS的完整教程 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher OpenCore Legacy Patcher是…...

高效跨平台游戏模组下载:WorkshopDL完全指南
高效跨平台游戏模组下载:WorkshopDL完全指南 【免费下载链接】WorkshopDL WorkshopDL - The Best Steam Workshop Downloader 项目地址: https://gitcode.com/gh_mirrors/wo/WorkshopDL 你是否在Epic Games Store、GOG或其他非Steam平台购买了游戏࿰…...

终极qmcdump指南:5分钟掌握QQ音乐加密格式解密技巧
终极qmcdump指南:5分钟掌握QQ音乐加密格式解密技巧 【免费下载链接】qmcdump 一个简单的QQ音乐解码(qmcflac/qmc0/qmc3 转 flac/mp3),仅为个人学习参考用。 项目地址: https://gitcode.com/gh_mirrors/qm/qmcdump qmcdump是…...

从零构建专属大语言模型:Self-LLM开源项目全流程实践指南
1. 项目概述与核心价值最近在开源社区里,一个名为datawhalechina/self-llm的项目引起了我的注意。乍一看,这像是一个关于大语言模型(LLM)的仓库,但“self”这个前缀又让人浮想联翩。经过一段时间的深入研究和实践&…...

【Midjourney图像生成黑科技】:树胶重铬酸盐工艺原理、复刻难点与AI艺术胶片质感还原全流程指南
更多请点击: https://intelliparadigm.com 第一章:树胶重铬酸盐工艺的历史溯源与数字时代复兴意义 树胶重铬酸盐工艺(Gum Bichromate Process)诞生于19世纪中叶,是人类最早实现光敏图像复制的化学摄影术之一。其核心原…...

MQ-3与MiCS-5524气体传感器对比:从原理到实战的选型指南
1. 项目概述与核心价值在嵌入式开发、环境监测乃至一些创意DIY项目中,气体检测是一个常见且关键的需求。无论是为了安全预警(如天然气泄漏),还是进行环境质量评估(如VOC监测),选择一款合适的传感…...

MCP服务器自动发现与管理工具mcpfinder详解
1. 项目概述:一个用于发现与管理MCP服务器的工具如果你正在构建或使用基于模型上下文协议(Model Context Protocol, 简称MCP)的应用,那么你很可能遇到过这样的困扰:手头有几个不同功能的MCP服务器ÿ…...

从零解析开源API网关fiGate:架构设计与生产实践
1. 项目概述:从零解析一个开源API网关最近在梳理团队内部微服务治理方案时,我又重新审视了市面上各类API网关的实现。除了大家耳熟能详的Kong、APISIX、Tyk这些“明星产品”,其实在GitHub的海洋里,还藏着不少设计精巧、思路独特的…...

MCP服务器部署模板:容器化与CI/CD自动化实践指南
1. 项目概述:一个为MCP服务器量身定制的部署蓝图如果你正在开发或维护一个基于模型上下文协议(Model Context Protocol, MCP)的服务器,并且对如何将其优雅、可靠地部署到生产环境感到头疼,那么你很可能已经…...