一学就会:A*算法详细介绍(Python)
📢本篇文章是博主人工智能学习以及算法研究时,用于个人学习、研究或者欣赏使用,并基于博主对相关等领域的一些理解而记录的学习摘录和笔记,若有不当和侵权之处,指出后将会立即改正,还望谅解。文章分类在👉启发式算法专栏:
【人工智能】- 【启发式算法】(6)---《一学就会:A*算法详细介绍(Python)》
一学就会:A*算法详细介绍(Python)
目录
A*算法介绍
A*算法的核心概念
A*算法的特点
A*算法示例:迷宫
执行步骤
第1步:初始化
第2步:扩展当前节点(起始节点)
第3步:选择下一个节点(最低 f(n))
第4步:处理当前节点 (0,1)
第5步:继续探索
重点说明
最终结果
A*算法与其他相关算法的比较
[Python] A*算法实现
[Results] 运行结果
[Notice] 注意事项
适用场景
实现建议
A*算法介绍
A*算法是一种高效的路径搜索算法,广泛应用于人工智能、机器人技术、游戏开发等领域。它由Peter Hart、Nils Nilsson和Bertram Raphael于1968年首次提出。A算法结合了Dijkstra算法的系统性搜索和启发式搜索的优点,通过使用启发式函数来减少搜索空间,同时保证找到最短路径。
A*算法的核心概念
A*算法是一种最佳优先搜索算法,它通过以下三个关键函数来评估路径:
-
g(n):从起点到当前节点的实际代价。
-
h(n):从当前节点到目标节点的启发式估算代价。
-
f(n) = g(n) + h(n):通过当前节点到达目标的总估算代价。
在每次迭代中,A*算法会选择具有最低f(n)值的节点进行扩展,并更新其邻居节点的代价。如果邻居节点的试探性代价低于之前记录的值,则会更新该节点的代价,并将其添加到开放集合中。这一过程会持续进行,直到找到目标节点或确定路径不存在。
A*算法的特点
-
最优性:当使用可接受的启发式函数时,A*算法能够找到最短路径。
-
效率:启发式函数的引导使得A*算法比Dijkstra算法探索更少的节点。
-
灵活性:启发式函数可以根据不同场景进行定制。
-
完整性:如果存在解决方案,A*算法将找到它。
A*算法示例:迷宫
以下是使用A*算法在一个示例迷宫中寻找路径的详细步骤说明:
假设有以下10x10的迷宫:
S 0 0 0 0 0 0 0 0 0
0 1 1 0 1 1 0 1 1 0
0 1 0 0 0 0 0 0 1 0
0 1 1 1 1 1 0 1 1 0
0 0 0 0 1 0 0 0 0 0
0 1 1 0 1 1 1 1 1 0
0 1 0 0 0 0 0 0 0 0
0 1 1 1 1 1 1 1 1 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 E其中,S 表示起点 (0,0),E 表示终点 (9,9),0 表示可以通行的路径,1 表示障碍物.
执行步骤
第1步:初始化
-
起始节点:
(0,0),初始化其g(n)=0,h(n)由直线距离计算,f(n)=0+13.416=13.416。 -
开放列表:未被选择的节点。
-
封闭列表:已被选择的节点。
-
当前节点:起始节点。
第2步:扩展当前节点(起始节点)
-
邻节点:
(0,1),(1,0)。 -
检查范围:确保邻节点在迷宫范围内。
-
障碍物检查:
(0,1)是0,(1,0)是0。 -
计算邻节点
g(n):-
(0,1):起始节点的g(n)=0+1=1。 -
(1,0):起始节点的g(n)=0+1=1。
-
-
计算邻节点
h(n):-
(0,1)的h(n)=sqrt((9-0)^2 + (9-1)^2)= sqrt(81+64)=11.401。 -
(1,0)的h(n)=sqrt((9-1)^2 + (9-0)^2)=sqrt(64+81)=11.401。
-
-
计算邻节点
f(n):-
(0,1)的f(n)=1+11.401=12.401。 -
(1,0)的f(n)=1+11.401=12.401。
-
-
在开放列表中添加邻节点:
-
(0,1)和(1,0)添加到开放列表。
-
第3步:选择下一个节点(最低 f(n))
开放列表中有 (0,1) 和 (1,0),它们的 f(n) 都是 12.401。可以选择其中任意一个:
选择 (0,1) 作为当前节点。
第4步:处理当前节点 (0,1)
-
邻节点:
(0,0)(起点,已在封闭列表),(0,2),(1,1)。 -
障碍物检查:
-
(0,2)是0。 -
(1,1)是1(障碍物)。
-
-
生成有效邻节点:
(0,2)。 -
计算
(0,2)的g(n):-
来自
(0,1),g(n)=1+1=2。
-
-
计算
(0,2)的h(n):-
sqrt((9-0)^2 + (9-2)^2)= sqrt(81+49)=10.630。
-
-
计算
(0,2)的f(n):-
2+10.630=12.630。
-
-
将
(0,2)添加到开放列表:-
开放列表现在包含
(1,0), (0,2)。
-
第5步:继续探索
重复步骤,选择开放列表中 f(n) 最低的节点,继续扩展并更新邻节点的 g(h,f) 值,直到到达目标节点 (9,9)。
重点说明
-
扩展当前节点:每次从开放列表中取出
f(n)最低的节点,生成其邻节点。 -
更新邻节点信息:
-
如果邻节点未被访问过,计算其
g(h,f)并加入开放列表。 -
如果邻节点已在开放列表中,需要比较新的
g(n)是否更小。如果更小,更新父节点和g(n)。
-
-
终止条件:
-
当前节点是目标节点,回溯路径。
-
开放列表为空,没有路径。
-
最终结果
经过反复的节点扩展和评估,A* 算法最终找到从起点 (0,0) 到终点 (9,9) 的最短路径。路径将避免迷宫中的所有障碍物,确保每一步都是经过成本最低的选择。
A*算法与其他相关算法的比较
| 算法 | 与A*的关系 | 关键差异 | 优缺点 |
|---|---|---|---|
| Dijkstra算法 | A*是Dijkstra算法的扩展 | A*使用f(n)=g(n)+h(n),Dijkstra仅使用g(n) | A*在有启发式函数时性能更好,Dijkstra无需启发式函数 |
| Bellman-Ford算法 | 基于边的松弛 | Bellman-Ford支持负边权重,A*通常更快 | Bellman-Ford适用于有负权重的图,A*需要启发式函数 |
| Floyd-Warshall算法 | 解决所有点对最短路径问题 | Floyd-Warshall使用动态规划,A*是增量搜索 | Floyd-Warshall适合密集图,A*适合实时路径搜索 |
[Python] A*算法实现
项目代码我已经放入下面链接里面:🔥
A*算法实现
若是下面代码复现困难或者有问题,也欢迎评论区留言。
"""《A*算法实现》时间:2025.02.27环境:迷宫作者:不去幼儿园
"""
import heapq
import matplotlib.pyplot as plt
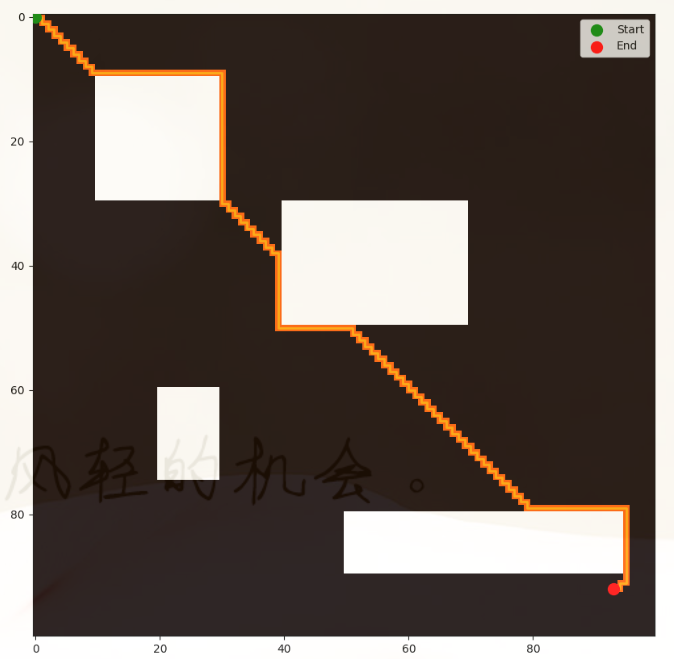
import numpy as npclass Node:"""节点类表示搜索树中的每一个点。"""def __init__(self, parent=None, position=None):self.parent = parent # 该节点的父节点self.position = position # 节点在迷宫中的坐标位置self.g = 0 # G值:从起点到当前节点的成本self.h = 0 # H值:当前节点到目标点的估计成本self.f = 0 # F值:G值与H值的和,即节点的总评估成本# 比较两个节点位置是否相同def __eq__(self, other):return self.position == other.position# 定义小于操作,以便在优先队列中进行比较def __lt__(self, other):return self.f < other.fdef astar(maze, start, end):"""A*算法实现,用于在迷宫中找到从起点到终点的最短路径。"""start_node = Node(None, start) # 创建起始节点end_node = Node(None, end) # 创建终点节点open_list = [] # 开放列表用于存储待访问的节点closed_list = [] # 封闭列表用于存储已访问的节点heapq.heappush(open_list, (start_node.f, start_node)) # 将起始节点添加到开放列表while open_list:current_node = heapq.heappop(open_list)[1] # 弹出并返回开放列表中 f 值最小的节点closed_list.append(current_node) # 将当前节点添加到封闭列表if current_node == end_node: # 如果当前节点是目标节点,则回溯路径path = []while current_node:path.append(current_node.position)current_node = current_node.parentreturn path[::-1] # 返回反向路径,即从起点到终点的路径(x, y) = current_node.positionneighbors = [(x-1, y), (x+1, y), (x, y-1), (x, y+1)] # 获取当前节点周围的相邻节点for next in neighbors:if 0 <= next[0] < maze.shape[0] and 0 <= next[1] < maze.shape[1]: # 确保相邻节点在迷宫范围内if maze[next[0], next[1]] == 1: # 如果相邻节点是障碍物,跳过continueneighbor = Node(current_node, next) # 创建相邻节点if neighbor in closed_list: # 如果相邻节点已在封闭列表中,跳过不处理continueneighbor.g = current_node.g + 1 # 计算相邻节点的 G 值neighbor.h = ((end_node.position[0] - next[0]) ** 2) + ((end_node.position[1] - next[1]) ** 2) # 计算 H 值neighbor.f = neighbor.g + neighbor.h # 计算 F 值if add_to_open(open_list, neighbor): # 如果相邻节点的新 F 值较小,则将其添加到开放列表heapq.heappush(open_list, (neighbor.f, neighbor))return None # 如果没有找到路径,返回 Nonedef add_to_open(open_list, neighbor):"""检查并添加节点到开放列表。"""for node in open_list:if neighbor == node[1] and neighbor.g > node[1].g:return Falsereturn True # 如果不存在,则返回 True 以便添加该节点到开放列表def visualize_path(maze, path, start, end):"""将找到的路径可视化在迷宫上。"""maze_copy = np.array(maze)for step in path:maze_copy[step] = 0.5 # 标记路径上的点plt.figure(figsize=(10, 10))plt.imshow(maze_copy, cmap='hot', interpolation='nearest')path_x = [p[1] for p in path] # 列坐标path_y = [p[0] for p in path] # 行坐标plt.plot(path_x, path_y, color='orange', linewidth=2)start_x, start_y = start[1], start[0]end_x, end_y = end[1], end[0]plt.scatter([start_x], [start_y], color='green', s=100, label='Start', zorder=5) # 起点为绿色圆点plt.scatter([end_x], [end_y], color='red', s=100, label='End', zorder=5) # 终点为红色圆点plt.legend()plt.show()# 设定迷宫的尺寸
maze_size = 100
maze = np.zeros((maze_size, maze_size))
obstacle_blocks = [(10, 10, 20, 20), # (y起始, x起始, 高度, 宽度)(30, 40, 20, 30),(60, 20, 15, 10),(80, 50, 10, 45),
]
for y_start, x_start, height, width in obstacle_blocks:maze[y_start:y_start+height, x_start:x_start+width] = 1
start = (0, 0)
end = (92, 93)
maze[start] = 0
maze[end] = 0
path = astar(maze, start, end)
if path:print("路径已找到:", path)visualize_path(maze, path, start, end)
else:print("没有找到路径。")[Results] 运行结果
[Notice] 注意事项
# 环境配置
Python 3.11.5
torch 2.1.0
torchvision 0.16.0
gym 0.26.2由于博文主要为了介绍相关算法的原理和应用的方法,缺乏对于实际效果的关注,算法可能在上述环境中的效果不佳或者无法运行,一是算法不适配上述环境,二是算法未调参和优化,三是没有呈现完整的代码,四是等等。上述代码用于了解和学习算法足够了,但若是想直接将上面代码应用于实际项目中,还需要进行修改。
适用场景
A*算法最适合以下场景:
-
单源单目标路径搜索。
-
可以提供领域特定的启发式函数。
-
需要最优解。
-
有足够的内存来维护开放/关闭集合。
主要应用场景
-
迷宫寻路:在游戏开发中,A*算法可以用来为游戏角色找到从起点到终点的最短路径,例如在迷宫类游戏中,角色需要绕过障碍物尽快到达目标。
-
机器人路径规划:在机器人领域,A*算法可用于规划机器人在复杂环境中的移动路径,帮助其避开障碍物并找到到达目标位置的最佳路线。
-
地图导航:在 GPS 导航系统或地图应用中,A*算法可以计算两点之间的最短路径,考虑道路长度、交通状况等多种因素,为用户提供最优的行驶路线建议。
实现建议
-
使用优先队列(如二叉堆或斐波那契堆)快速选择节点。
-
根据图的大小选择合适的数据结构。
-
设计并验证有效的启发式函数。
算法优点
-
寻找最短路径:无论是二维平面还是三维空间,A*算法都能够有效地在复杂的环境图中找到从起点到终点的最短路径,尤其是在具有障碍物和多重路径选择的情况下。
-
优化效率:相比传统的广度优先搜索和深度优先搜索,A*算法通过结合启发式估计和实际路径成本,能够更高效地探索可能的路径,减少不必要的计算,大大提升了路径寻找的效率。
-
适应复杂环境:A*算法能够灵活地处理各种环境变化,如新增障碍物、改变目标位置等,只需重新计算路径即可,无需对整个地图进行重新规划。
实现效果
-
准确性:A*算法能够精确地找到最优路径,确保路径的总成本(如距离、时间等)最小,对于大多数场景来说,其结果都是全局最优的。
-
实时性:在处理复杂地图时,A*算法能够在较短时间内完成路径规划,满足实时性要求,特别是在一些动态环境(如即时战略游戏或动态交通导航)中。
-
可视化:通过可视化工具,可以清晰地看到 A*算法的搜索过程,路径是如何被逐步探索和确定的,这对于调试和理解算法的工作原理非常有帮助。
更多启发式算法文章,请前往:【启发式算法】专栏
博客都是给自己看的笔记,如有误导深表抱歉。文章若有不当和不正确之处,还望理解与指出。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请联系博主删除。如有错误、疑问和侵权,欢迎评论留言联系作者,或者添加VX:Rainbook_2,联系作者。✨
相关文章:
一学就会:A*算法详细介绍(Python)
📢本篇文章是博主人工智能学习以及算法研究时,用于个人学习、研究或者欣赏使用,并基于博主对相关等领域的一些理解而记录的学习摘录和笔记,若有不当和侵权之处,指出后将会立即改正,还望谅解。文章分类在&am…...
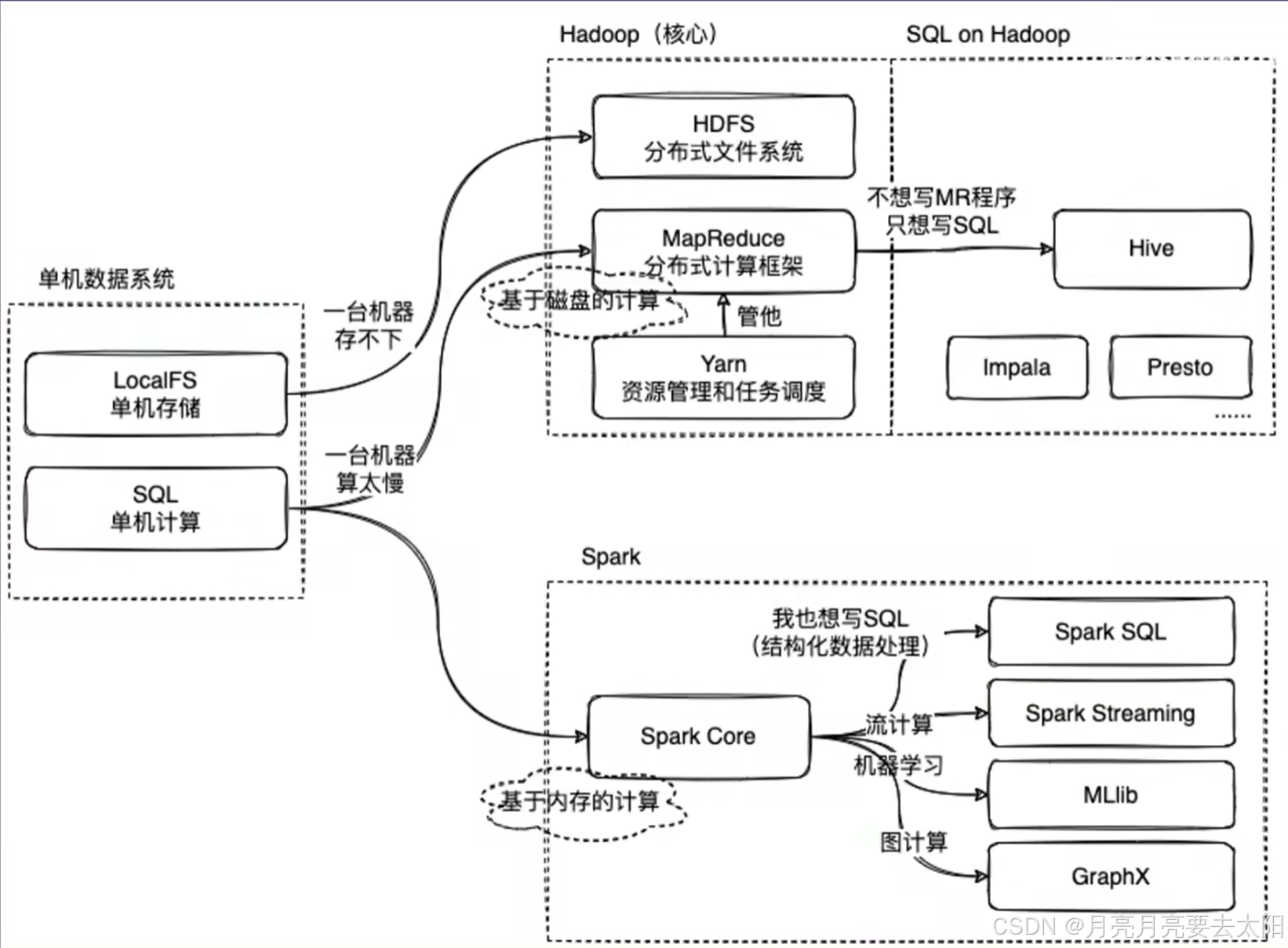
Hadoop、Hive、Spark的关系
Part1:Hadoop、Hive、Spark关系概览 1、MapReduce on Hadoop 和spark都是数据计算框架,一般认为spark的速度比MR快2-3倍。 2、mapreduce是数据计算的过程,map将一个任务分成多个小任务,reduce的部分将结果汇总之后返回。 3、HIv…...

Excel·VBA江西省预算一体化工资表一键处理
每月制作工资表导出为Excel后都需要调整格式,删除0数据的列、对工资表项目进行排序、打印设置等等,有些单位还分有“行政”、“事业”2个工资表就需要操作2次。显然,这种重复操作的问题,可以使用VBA代码解决 目录 代码使用说明1&a…...
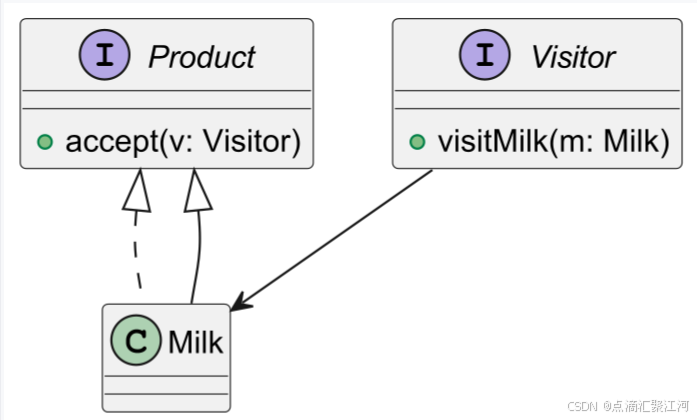
23种设计模式简介
一、创建型(5种) 1.工厂方法 总店定义制作流程,分店各自实现特色披萨(北京店-烤鸭披萨,上海店-蟹粉披萨) 2.抽象工厂 套餐工厂(家庭装含大披萨薯条,情侣装含双拼披萨红酒&#…...

python fire 库与 sys.argv 处理命令行参数
fire库 Python Fire 由Google开发,它使得命令行接口(CLI)的创建变得容易。使用Python Fire,可以将Python对象(如类、函数或字典)转换为可以从终端运行的命令行工具。这能够以一种简单而直观的方式与你的Py…...

PDF处理控件Aspose.PDF,如何实现企业级PDF处理
PDF处理为何成为开发者的“隐形雷区”? “手动调整200页PDF目录耗时3天,扫描件文字识别错误导致数据混乱,跨平台渲染格式崩坏引发客户投诉……” 作为开发者,你是否也在为PDF处理的复杂细节消耗大量精力?Aspose.PDF凭…...
Spring(1)——mvc概念,部分常用注解
1、什么是Spring Web MVC? Spring MVC 是一种基于 Java 的实现了 MVC(Model-View-Controller,模型 - 视图 - 控制器)设计模式的 Web 应用框架,它是 Spring 框架的一个重要组成部分,用于构建 Web 应用程序。…...
C语言(23)
字符串函数 11.strstr函数 1.1函数介绍: 头文件:string.h char *strstr ( const char * str1,const char *str2); 作用:在一个字符串(str1)中寻找另外一个字符串(str2)是否出现过 如果找到…...
Immich自托管服务的本地化部署与随时随地安全便捷在线访问数据
文章目录 前言1.关于Immich2.安装Docker3.本地部署Immich4.Immich体验5.安装cpolar内网穿透6.创建远程链接公网地址7.使用固定公网地址远程访问 前言 小伙伴们,你们好呀!今天要给大家揭秘一个超炫的技能——如何把自家电脑变成私人云相册,并…...
基于SpringBoot的在线付费问答系统设计与实现(源码+SQL脚本+LW+部署讲解等)
专注于大学生项目实战开发,讲解,毕业答疑辅导,欢迎高校老师/同行前辈交流合作✌。 技术范围:SpringBoot、Vue、SSM、HLMT、小程序、Jsp、PHP、Nodejs、Python、爬虫、数据可视化、安卓app、大数据、物联网、机器学习等设计与开发。 主要内容:…...

【Linux】信号处理以及补充知识
目录 一、信号被处理的时机: 1、理解: 2、内核态与用户态: 1、概念: 2、重谈地址空间: 3、处理时机: 补充知识: 1、sigaction: 2、函数重入: 3、volatile&…...

pandas——to_datatime用法
Pandas中pd.to_datetime的用法及示例 pd.to_datetime 是 Pandas 库中用于将字符串、整数或列表转换为日期时间(datetime)对象的核心函数。它在处理时间序列数据时至关重要,能够灵活解析多种日期格式并统一为标准时间类型。以下是其核心用法及…...

《DataWorks 深度洞察:量子机器学习重塑深度学习架构,决胜复杂数据战场》
在数字化浪潮汹涌澎湃的当下,大数据已然成为推动各行业发展的核心动力。身处这一时代洪流,企业对数据的处理与分析能力,直接关乎其竞争力的高低。阿里巴巴的DataWorks作为大数据领域的扛鼎之作,凭借强大的数据处理与分析能力&…...

Java 大视界 -- 基于 Java 的大数据实时数据处理框架性能评测与选型建议(121)
💖亲爱的朋友们,热烈欢迎来到 青云交的博客!能与诸位在此相逢,我倍感荣幸。在这飞速更迭的时代,我们都渴望一方心灵净土,而 我的博客 正是这样温暖的所在。这里为你呈上趣味与实用兼具的知识,也…...

多线程-JUC
简介 juc,java.util.concurrent包的简称,java1.5时引入。juc中提供了一系列的工具,可以更好地支持高并发任务 juc中提供的工具 可重入锁 ReentrantLock 可重入锁:ReentrantLock,可重入是指当一个线程获取到锁之后&…...

DeepSeek:中国AGI先锋,用技术重塑通用人工智能的未来
在ChatGPT掀起全球大模型热潮的背景下,中国AI领域涌现出一批极具创新力的技术公司,深度求索(DeepSeek)便是其中的典型代表。这家以“探索未知、拓展智能边界”为使命的AI企业,凭借长文本理解、逻辑推理与多模态技术的…...

Vue 框架深度解析:源码分析与实现原理详解
文章目录 一、Vue 核心架构设计1.1 整体架构流程图1.2 模块职责划分 二、响应式系统源码解析2.1 核心类关系图2.2 核心源码分析2.2.1 数据劫持实现2.2.2 依赖收集过程 三、虚拟DOM与Diff算法实现3.1 Diff算法流程图3.2 核心Diff源码 四、模板编译全流程剖析4.1 编译流程图4.2 编…...

Python爬虫获取淘宝快递费接口的详细指南
在电商运营中,快递费用的透明化和精准计算对于提升用户体验、优化物流成本以及增强市场竞争力至关重要。淘宝提供的 item_fee 接口能够帮助开发者快速获取商品的快递费用信息。本文将详细介绍如何使用 Python 爬虫技术结合 item_fee 接口,实现高效的数据…...
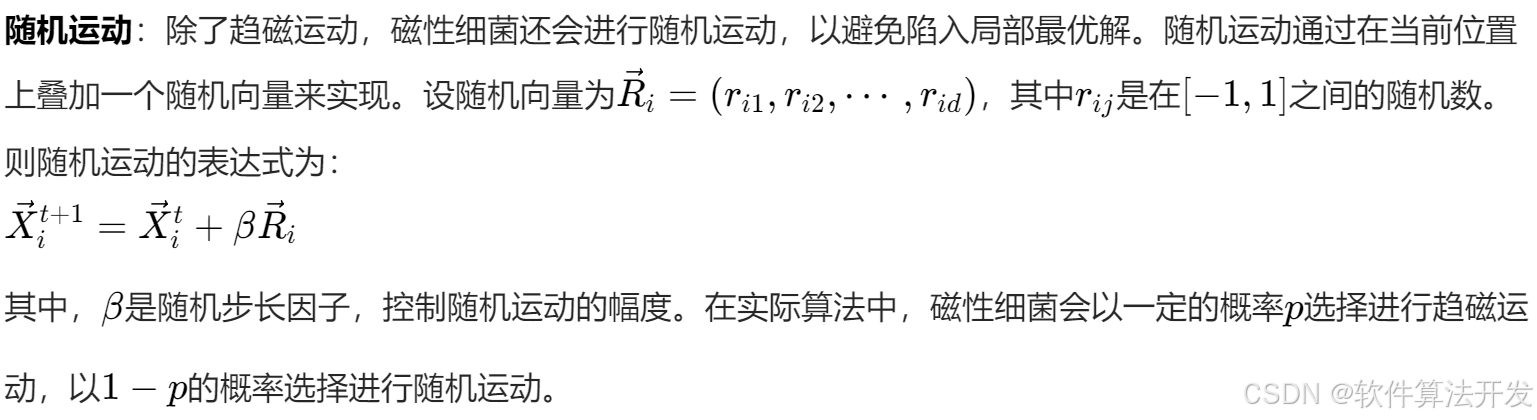
基于BMO磁性细菌优化的WSN网络最优节点部署算法matlab仿真
目录 1.程序功能描述 2.测试软件版本以及运行结果展示 3.核心程序 4.本算法原理 5.完整程序 1.程序功能描述 无线传感器网络(Wireless Sensor Network, WSN)由大量分布式传感器节点组成,用于监测物理或环境状况。节点部署是 WSN 的关键问…...

Android Activity的启动器ActivityStarter入口
Activity启动器入口 Android的Activity的启动入口是在ActivityStarter类的execute(),在该方法里面继续调用executeRequest(Request request) ,相应的参数都设置在方法参数request中。代码挺长,分段现在看下它的实现,分段一&#x…...

抖音数字资产管理方法论:构建个人内容沉淀系统的技术实践
抖音数字资产管理方法论:构建个人内容沉淀系统的技术实践 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback su…...

别再死记硬背了!用Multisim仿真+图解,5分钟搞懂三极管共射放大电路工作原理
用Multisim仿真图解5分钟掌握三极管共射放大电路三极管共射放大电路是电子技术中最基础也最关键的电路之一,但传统教材中复杂的公式推导和静态图解往往让初学者望而生畏。本文将带你用Multisim仿真软件,通过可视化的方式直观理解电路工作原理,…...
)
蓝牙抓包不求人:从HCI日志里‘挖’出Link Key的两种实用方法(附安卓路径)
蓝牙安全逆向实战:从HCI日志中提取Link Key的深度解析在蓝牙协议安全研究领域,Link Key作为设备配对认证的核心凭证,其获取方式一直是逆向工程师关注的焦点。许多安全审计场景下,我们往往只能获得加密后的HCI通信日志,…...

从入门到上岗,Java+AI 复合型人才养成攻略
当下编程行业格局正在悄然改变,纯 Java 后端岗位内卷日趋严重,薪资增长逐步放缓;纯粹的 AI 算法岗门槛居高不下,对学历、数理功底要求严苛,普通开发者很难入局。 而Java+AI 复合型开发顺势成为行业刚需岗位,既依托成熟的 Java 体系承接业务开发,又能融入人工智能技术实…...

智能手机相机光谱特性测量与多光谱成像技术
1. 智能手机相机光谱特性测量基础智能手机相机的光谱灵敏度函数(Spectral Sensitivity Function, SSF)和透射率函数是计算摄影领域的核心参数,它们决定了设备对光信号的响应特性。准确获取这些参数对色彩还原、光谱重建和白平衡校准等任务至关重要。1.1 光谱灵敏度函…...

航空航天为什么离不开高强镁合金?国产替代到哪一步了
飞机每减重一千克,全年大约节省四千两百美元的燃油费用——这是航空工程师熟悉的经验值。在商业航空领域,这个数字还只是财务账;在战斗机、导弹和卫星的世界里,减重的收益被换算成更远的航程、更大的载荷、更高的机动性࿰…...

AI算力要上天?别笑,太空数据中心真能干翻地球电费!
前言你有没有算过,训练一个大模型,相当于烧掉多少吨煤?如今AI狂飙突进,算力需求指数级增长,可地球上的电——不够用了!更别说建个数据中心还得跟地方政府“斗智斗勇”,抢地皮、配储能、扛审批&a…...

Python UiAutomation实战:从网页数据抓取到桌面应用,一个库打通数据采集全链路
Python UiAutomation实战:打通数据采集全链路的智能解决方案 在数据驱动的商业环境中,企业常常面临跨平台数据采集的挑战——财务系统里的交易记录需要与网站后台的报表进行交叉分析,销售数据要从桌面软件导出后上传到云端处理系统。传统的人…...

Office RibbonX Editor:简单三步打造你的专属Office界面
Office RibbonX Editor:简单三步打造你的专属Office界面 【免费下载链接】office-ribbonx-editor An overhauled fork of the original Custom UI Editor for Microsoft Office, built with WPF 项目地址: https://gitcode.com/gh_mirrors/of/office-ribbonx-edit…...
)
别再死磕USB HID了!用ESP32的Arduino框架手把手教你实现蓝牙鼠标键盘(附完整代码)
ESP32蓝牙HID实战:零基础打造自定义键盘鼠标 手里那块吃灰的ESP32开发板终于能派上用场了!上周我用它做了个无线演示控制器,在会议室里走着就能翻PPT,同事们都问是怎么实现的。其实秘诀就在于ESP32的蓝牙HID功能——不需要任何USB…...