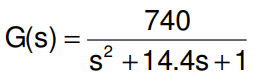
智能汽车的主动悬架工作原理详述
摘要:
本文将详细介绍主动悬架功能原理设计。
主动悬架是车辆上的一种汽车悬架。它使用车载系统来控制车轮相对于底盘或车身的垂直运动,而不是由大弹簧提供的被动悬架,后者的运动完全由路面决定。主动悬架分为两类:真正的主动悬架和自适应或半主动悬架。半自适应悬架仅改变减震器的硬度以适应不断变化的道路或动态条件,而主动悬架使用某种类型的执行器在每个车轮处独立升高和降低底盘。主动悬架系统提供更好的乘坐舒适性和车辆稳定性。但与半主动或被动悬架系统相比,它的成本太高。
然而,在越来越智能化的汽车发展思路上,主动悬架确实也是大伙儿研究的一个主要方向。比如奔驰S级主动悬挂系统可通过摄像头探测路面起伏情况,然后让悬挂系统主动调节车轮高度而使车身在不平整的路面上仍能保持水平。让驾乘体验就像坐在魔毯漂浮在路面上一样。魔毯悬挂因此而得名。这种结合智能感知+主动悬挂应用在汽车智能驾驶上的优势可以提供全时车身稳定功能,并赋予汽车更好的驾乘感受,使令人不适的车身运动最小化,从而消减车身颠簸和侧倾。
因此,本系列文章将以两个不同的方向分别讲解魔毯式主动悬架的应用理论。其中包括主动悬架自身设计原理和智能感知路面预瞄原理及性能指标设计。本文将详细介绍主动悬架功能原理设计。
1、主动悬架设计原理
主动悬架系统是在车辆的簧载质量和非簧载质量之间运行。它最大限度地减少了由道路和车辆动力学引起的垂直加速度和车辆振动,提高了车辆的操控性和稳定性。主动悬架系统包括液压回路、传感器和控制系统。大多数已经达到硬件开发和量产阶段的主动悬架都使用了某种形式的电液执行器。

图1 主动悬架框架
如下图 2所示的四分之一车辆模型。从达到行驶稳态的时间上讲,主动悬架和被动悬架都可以做到,但是主动悬架的冲击明显比被动悬架小很多,这会在乘坐舒适性和车辆稳定性之间取得更好的折衷。
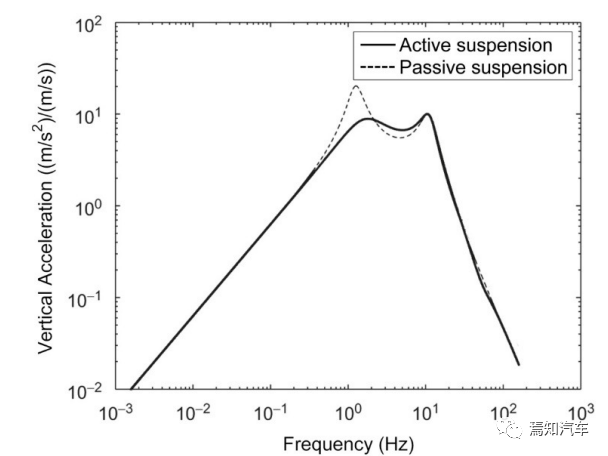
图2 主动和被动悬架的加速度频率响应
目前公认的有两种形式的主动悬架。第一种是快速主动悬挂或高带宽系统 (HB),通常称为全主动。第二种是慢速主动悬挂或低带宽系统 (LB)。在主动悬架中,被动阻尼器和弹簧都被力致动器取代,如下图3所示。

图3 不同主动悬架系统的组成设计原理
全主动悬挂系统(高带宽)也称为高带宽,将致动器放置在簧载质量和非簧载质量之间。高带宽系统的主要功能是在整个系统的全带宽范围内对系统进行控制。具体来说,这意味着它的目的是增强围绕嘎嘎声空间频率(从 10 到 12 赫兹)和轮胎跳跃频率(从 3 到 4 赫兹)的悬架响应。
前期,也有利用电液伺服系统 (EHS) 建立主动悬架系统,并采用了首次申请的压力控制阀。悬架由微处理器和加速度传感器控制,系统强调天钩阻尼器,与传统的低频悬架相比,它可以减少车身振动,这是通过相对于其绝对速度向身体施加主动阻尼力来实现的。液压系统具有依赖于道路输入激励频率的被动阻尼特性。这些特性的增强会减少高频路面输入产生的振动。
主动悬架系统中使用的硬件,范围从简单的摆动阻尼器、半主动阻尼器、低带宽/软主动悬架到高带宽/刚性主动悬架有所不同。自适应和半主动装置是改善直线行驶和处理瞬态性能的有效手段,虽然它们在行驶中提供的改进不如主动悬架那么大。
慢速主动悬挂系统(低带宽)适用于低带宽操作。在该系统中,执行器与弹簧和/或阻尼器串联放置。慢速主动悬架系统(在小于 3 Hz 的低带宽下运行)旨在实现悬架在较低频率范围内的控制策略,特别是在发出嘎嘎声空间频率附近。在较高频率下,致动器有效地锁定,因此轮跳运动受到被动控制。与高带宽系统相比,低带宽系统可以在机动过程中以更低的能耗实现车身侧倾和俯仰的显着降低。为了提供超出受控带宽的悬挂作用,执行器必须与传统弹簧串联安装,这反过来又降低了系统的能量需求。
目前主要有两种形式的低带宽系统,如上图3(b)(c)所示,一种形式是执行器与道路弹簧串联,并具有单独的被动阻尼器(LB1),另一种形式是执行器位于弹簧和阻尼器系列 (LB2)。在慢速主动悬架中,被动弹簧在高频下可以提供所需的隔离,而执行器在该频率下可以提供振动控制低频(通常低于 3 赫兹)。
理论研究表明,有限带宽有源系统的性能与全有源系统相似,但成本和实施复杂性较低。这些基于四分之一汽车模型的研究表明,当假定组件处于理想化状态且车辆在直线行驶条件下运行时,功率需求将非常适中。该系统的一些可能实际实施部分已经通过使用液压气动元件提出,例如带有阀门的气动弹簧来控制空气供应和排气。
由于致动器只需要 3-4 Hz 的窄带宽,因此慢速主动悬架系统比需要宽带致动器的全主动悬架系统便宜得多。但主动控制仍然包含弹跳、俯仰和侧倾中身体共振频率的正常范围,以及就对转向控制的响应而言感兴趣的频率范围。因此,慢速主动悬浮液是商业上可行的替代方案。
2、主动悬架系统主要工作数学模型
1)电液伺服阀的数学模型
由于EHSV 的数学模型由 27 个方程描述,为简化起见,在全主动悬架系统模型中不再使用典型的EHSV 模型,因为计算和迭代过程需要很长时间。因此,找到 EHSV 的等效传递函数很重要。为此,计算了致动器位移可以进一步得到输入电流的瞬态响应。发现阀芯位移的阶跃响应表现得像一个过阻尼二阶系统,这可以用二阶系统的以下传递函数来描述。
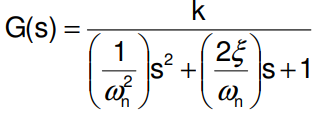
该传递函数中需要计算相应的代表性传递函数的系数 k、ωn 和 ξ。增益值 (k) 是稳态条件下的阀芯位移除以励磁电流值 10 mA。ωn 和ξ的值可以通过运行Simulink 程序计算的。
2)液压气动悬挂装置的数学模型
液气悬架装置方案如下图所示。该系统的数学模型是通过应用描述悬架单元动态行为的方程式开发的。
以下等式描述了这个系统。

其中,

是一个考虑活塞腔压缩性影响的术语。

图4.液压气动悬架示意图 图5.液压气动悬架装置的阻尼系统阀门
如图4所示阻尼系统压缩和回弹冲程中的可变节流孔区域由四个孔组成,孔上覆盖着一块铆接在其中心的圆形薄板。
3)四分之一车辆悬架参数
四分之一汽车模型的数学描述如下:

减震器的阻尼系数 (CS) 是根据经过验证的阻尼器仿真模型即时计算的。F(t) 是作用在车轮上并由表面不规则引起的激励。如果 xo 是表面轮廓的高程,ox&则代表轮胎在地面接触点的垂直速度,它是道路轮廓的坡度乘以车辆的前进速度。
3、主动悬架系统设计
本文将详细讲解一种典型的主动悬架工作模型如下图所示,可以很好的帮助读者很快的理解主动悬架的工作过程。该模型主要由电液伺服阀、执行器、空气弹簧、LVDT 和控制器组成。电液驱动器广泛用于主动悬架的设计中,从精度和速度的角度来看,电液伺服系统提供了良好的控制。

(1)液压泵 (2) 溢流阀 (3) 蓄能器 (4) EHSV (5) 蓄能器 (6) 节流阀 (7) 气弹簧 (8) 液压执行器 (9) LVDT (10) 轮胎(弹簧+减震器) (11) 油箱
图6 主动悬架工作模型
选择输出控制变量以实现车身所需的动态响应,构建测量反馈值的控制结构,确定了测量装置。设计的主动悬架系统的运行分为三种模式;中性模式,压缩模式和回弹模式。
1)中性模式
当车辆在非常平坦的路面上行驶或车辆停止时,表示没有来自路面的输入位移,车身与车轮总成之间没有任何相对运动。来自 LVDT 和加速度计的反馈电流为零,并且到伺服阀的误差信号 (ie) 为零。如上图(4)所示,此时EHSV 的阀芯处于中位。
2)压缩模式
如果车辆遇到路面颠簸,车轮组件会向上移动,并且车身与车轮之间的距离减小。来自 LVDT 和加速度计的反馈电流增加,并且到伺服阀的误差信号也随即增加。压力 (P2) 也将同步增加,阀芯向左移动。活塞室部分连接到油箱,以允许油流运动由于活塞的运动被引导到油箱,这一过程中几乎使车身保持在同一水平面上。
3)回弹模式
在坑洼回弹行程中,车轮总成向下运动,车身与车轮总成的距离增大。结果,反馈电流增加,同时 EHSV 的负误差信号 (ie) 也随即增加。
油流运动增加到左侧阀芯室,压力(P1)增加,因此阀芯向右移动,气缸室与压力管路相连,油流到活塞室以补偿活塞向外运动,这样可以尽量使车身保持在同一水平面上。

4、伪微分回授控制PDF在主动悬架PID中的应用
对于主动悬架的调节而言,通常也是采用比较典型的比例-积分-微分控制器(PID 控制器)来控制回路反馈。PID 控制过程是将“误差”值计算为测量输出值与所需设定点之间的差值,控制器试图通过调整实际设备控制输入来最小化误差。
对于典型的阶跃输入,包含微分器块的 PID 模块会引起系统响应的突然高幅度峰值。为了消除这种缺点,需要在反馈路径中引入微分操作,并改善系统的响应。PDF控制(pseudo-derivative feedback control)的基本思想是避免系统内部出现较大的控制信号(会引起饱和现象)。因此,在 PDF 控制器中,系统响应是高度可接受的,可以设置点跳跃来避免由于传统 PID 控制器的正向路径中存在微分器而产生的脉冲冲击。
此外,该系统可以保证较低的非同步误差。通过将比例和微分控制作用引入反馈路径,可以为 Kp 和 Td 选择比 PID 控制可能值更大的值。因此,PDF 控制系统可以比 PID 控制的情况更快地衰减干扰的影响。因此,研究主动悬架系统 PID 和 PDF 控制器的动态性能将有利于对整个主动悬架系统的应用策略优化。
以下将详细说明这两种调节机制在主动悬架中的应用,以方便更好的研究车辆主动悬架系统的动态性能。
本文介绍了一种配备主动悬架系统的四分之一车辆的设计,通过为受控系统开发数学模型和开发计算机模拟程序来评估系统的动态行为。该系统包含一个由比例积分微分 (PID) 控制器或者使用伪微分反馈控制器 (PDF)控制的电液伺服系统 。两个控制器的参数都经过估计和调整,以最小化平方误差积分 (ISE) 和时间绝对误差积分 (ITAE) 标准。比例微分 (PD) 控制器提供最短的稳定时间。PDF 控制器显示可忽略的最大超调百分比,而 PID 显示最大百分比超调在 5% 以内。比例、积分 (PI) 和 PD 显示出较长的稳定时间。
1)PID控制器的设计
PID 控制器计算算法涉及三个独立的常量参数,因此有时也称为三项控制:比例值、积分值和微分值,分别表示为 P、I 和 D(如下图)。比例项 P 取决于当前误差,积分项 I 取决于过去误差的累积,导数项 D 是基于当前变化率对未来误差的预测。这三个动作的加权总和用于通过控制元件(例如控制阀或阻尼器的位置)来调整设备或过程。
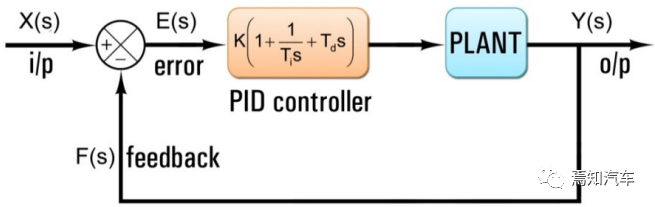
2)PID 控制器在闭环系统中的连接
选择控制器参数以满足给定性能规范的过程称为控制器调整。建议根据实验阶跃响应或 Ku 值调整 PID 控制器(即设置 Kp、Td 和 Ti 值)的规则,这会在仅使用比例控制动作时导致边际稳定性。当数学模型未知时,采用Ziegler-Nichols规则很有用。此类规则建议一组 Kp、Td 和 Ti 值,这将使系统稳定运行。然而,最终系统可能会在阶跃响应中表现出较大的最大过冲,这是不可接受的。在这种情况下,我们需要进行一系列微调,直到获得可接受的结果。事实上,Ziegler-Nichols 调整规则给出了对参数值极有根据的猜测,并提供了微调的起点,而不是一次性给出 Kp、Ti 和 Td 的最终设置。
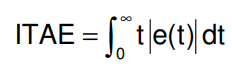
在此,本研究使用 PID 控制器参数的第一次估计是根据第一个 Ziegler-Nichols 方法进行的。此外,后续的手动进行微调过程也可以找到控制器的参数;K、Ti和Td,确保时间绝对误差积分(ITAE)性能指标的最小值。
对应的ITAE定义如下:
一些应用程序可能只需要使用一个或两个操作来提供适当的系统控制。这是通过将其他参数设置为零来实现的。如果没有相应的控制动作,PID 控制器将被称为 PI、PD、P 或 I 控制器。PI 控制器相当普遍,因为微分作用对测量噪声很敏感。控制器的常数经过计算和微调。带有比例控制器的系统的阶跃响应表明,适当比例控制器的实施将稳定时间从 5.26 秒减少到 0.65 秒。但是,这个结论不能一概而论。比例控制器与不可忽略的稳态误差相关联,除非设备包含积分元件。
2)PDF控制器的设计
已有理论提出了一组用于估计控制器增益常数的第一近似值的公式;Kp、KD 和 Ki,从中开始微调。这些公式是分析和实验结果的组合。这些公式基于需要基本线性输出响应的最大阶跃输入。因此,PDF 控制器的开发需要系统的开环表示,通过一阶或二阶传递函数。为此,计算了系统对阶跃输入电流 i 的瞬态响应,用于应用阶跃的不同幅度。主动悬架系统呈现的阶跃响应显然类似于二阶元件的阶跃响应,其传递函数由如下公式给出:
3)主动悬架系统的阶跃响应及等效代表模型
从以上方程式可以计算 PDF 控制器常数的一阶近似值。PDF 控制器的调整是通过找到系数 Kp、KD、Kin 的最佳组合来实现最佳系统响应参数提供。

如下图表示了PID和PDF对于响应的控制结果对比图。
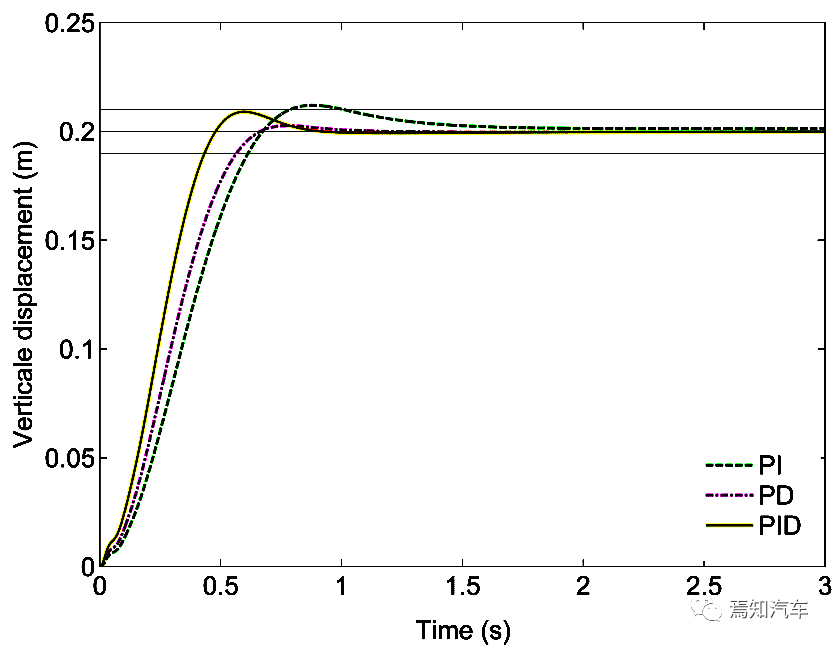
PID 控制器给出了最好的结果,主要是在沉降水平上时间。并且 PD 控制器给出了最小最大百分比过冲。微分作用可预测系统行为,从而改善系统的稳定时间和稳定性。然而,微分作用很少在实践中使用,因为它对测量噪声具有固有的敏感性。如果这种噪声足够严重,则微分作用将不稳定并且实际上会降低控制性能。测量误差的大而突然的变化(通常发生在设定点改变时)会导致突然的、大的控制动作,源于微分项,这被称为微分突跳。如果测量误差通过线性低通滤波器或非线性但简单的中值滤波器,则可以在一定程度上改善此问题。
PI 控制器很常见,因为微分作用对测量噪声很敏感。但是由于在所研究的主动悬架中包含一个积分元件,因此该控制器的功能并没有出现在这里。
作者 | Jessie
来源 | 焉知
相关文章:
智能汽车的主动悬架工作原理详述
摘要: 本文将详细介绍主动悬架功能原理设计。 主动悬架是车辆上的一种汽车悬架。它使用车载系统来控制车轮相对于底盘或车身的垂直运动,而不是由大弹簧提供的被动悬架,后者的运动完全由路面决定。主动悬架分为两类:真正的主动悬架…...

vue2和vue3的一些技术点复习
二、vue2 1、vue2对已有组件二次封装,例如fes2 input 组件(文档链接) 子组件 <template><div class"keyboard-page"><wb-input:id"keyBoardId":placeholder"placeholder" :type"type&q…...

安装nvm 切换node版本
1. 安装 nvm curl -o- https://raw.githubusercontent.com/creationix/nvm/v0.33.1/install.sh | bash 验证nvm安装完成 command -v nvm 如果安装完成,就会显示如下 nvm 2. 查看 nvm 可以安装的 node 版本 查看可以安装的版本 nvm ls-remote 查看所有可以安装的…...

【html中的BFC是什么】
BFC(块级格式化上下文)是 CSS 中的一种盒模型布局,是指一个独立的块级容器,容器内部的元素会按照一定规则进行布局。 BFC 具体的规则有以下几个: BFC 内部的元素在垂直方向上相互排列,不会出现浮动的情况。…...
苹果账号被禁用怎么办
转载:苹果账号被禁用怎么办 目录 禁用的原因 解除Apple ID禁用 [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-UKQ1ILhC-1689932607373)(data:image/gif;base64,R0lGODlhAQABAPABAP///wAAACH5BAEKAAAALAAAAAABAAEAAAICRAEAOw)]编辑 …...

跨境出海企业,如何防范恶意退货欺诈
很多出海企业遭遇到过恶意退货事件。 2021年,某跨境商家在海外电商平台运营超过13年。有一次,有个海外买家买了一台二手的数码摄像机。在买家收到货后,却声称商品备在使用了45分钟之后便自动关机,且不能继续充电。该商家很肯定产…...

数据出境要依法“过安检”!什么是数据出境?
为了规范数据出境活动,保护个人信息权益,维护国家安全和社会公共利益,促进数据跨境安全、自由流动。从2022年9月1日起,《数据出境安全评估办法》施行。什么是数据出境,什么情况下需要进行数据出境安全评估呢࿱…...
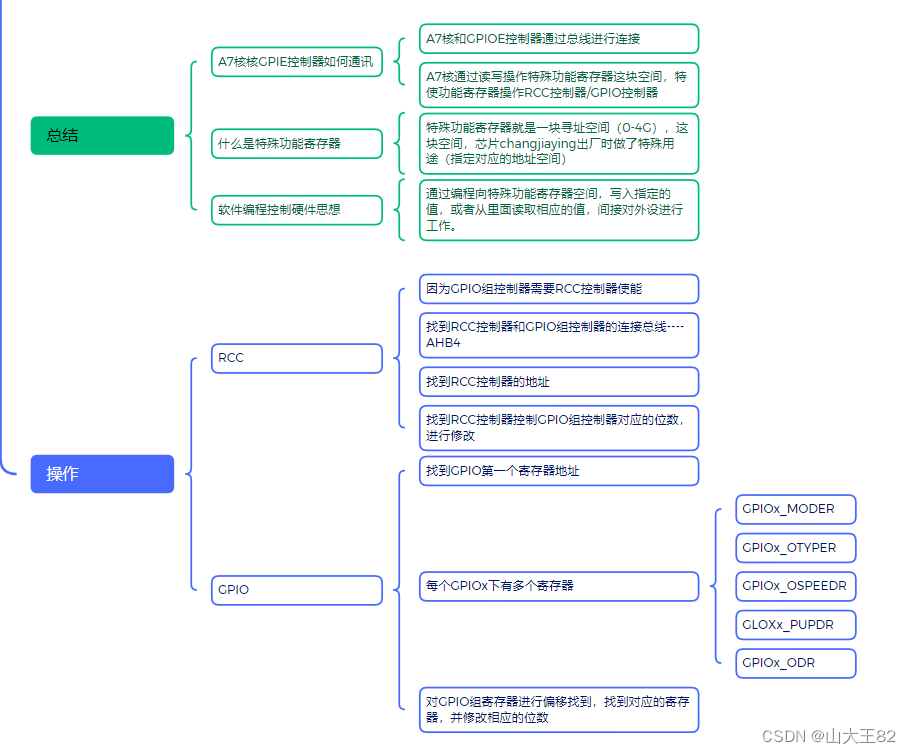
ARM——点灯实验
循环点灯 RCC寄存器使能GPIOE、GPIOF组寄存器 修改GPIOx组寄存器下的值 通过GPIOx_MODER寄存器设置为输出模式通过GPIOx_OTYOER寄存器设置为推挽输出类型通过GPIOx_OSPEEDR寄存器设置为低速输出通过GPIOx_PUPDR寄存器设置为禁止上下拉电阻点灯 通过GPIOx_ODR寄存器设置为高电…...

Kubernetes 使用 helm 部署 NFS Provisioner
文章目录 1. 介绍2. 预备条件3. 部署 nfs4. 部署 NFS subdir external provisioner4.1 集群配置 containerd 代理4.2 配置代理堡垒机通过 kubeconfig 部署 部署 MinIO添加仓库修改可配置项 访问nodepotingress 1. 介绍 NFS subdir external provisioner 使用现有且已配置的NFS…...
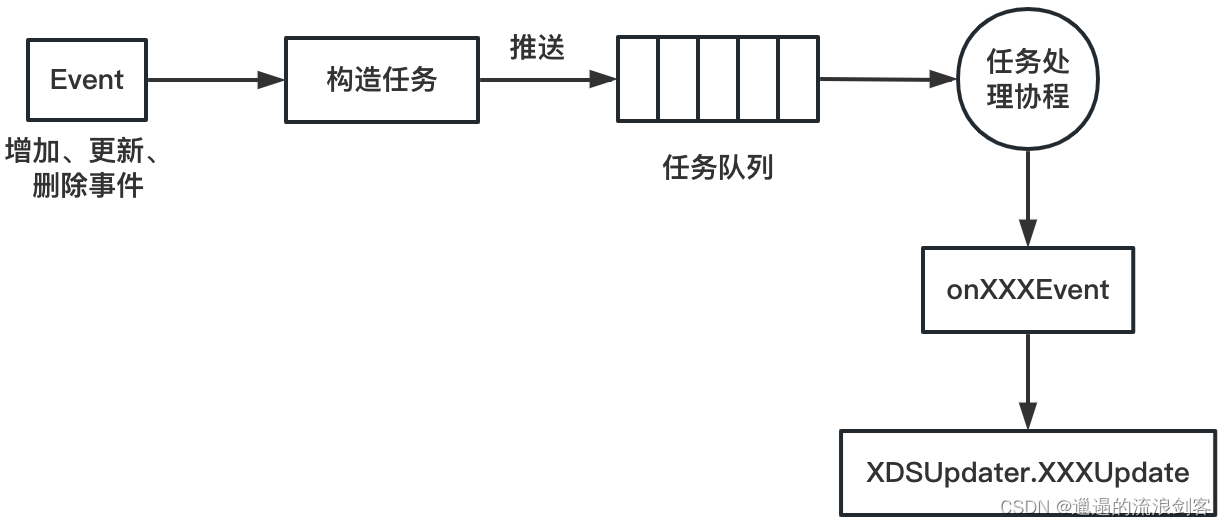
Istio Pilot源码学习(二):ServiceController服务发现
本文基于Istio 1.18.0版本进行源码学习 4、服务发现:ServiceController ServiceController是服务发现的核心模块,主要功能是监听底层平台的服务注册中心,将平台服务模型转换成Istio服务模型并缓存;同时根据服务的变化,…...

Spring框架中的ResourcePatternResolver只能指定jar包内文件,指定容器中文件路径报错:FileNotFoundException
原始代码: public static <T> T getFromFile(String specifiedFile, String defaultClasspathFile, Class<T> expectedClass) {try {ResourcePatternResolver resolver new PathMatchingResourcePatternResolver();Resource[] resources resolver.ge…...
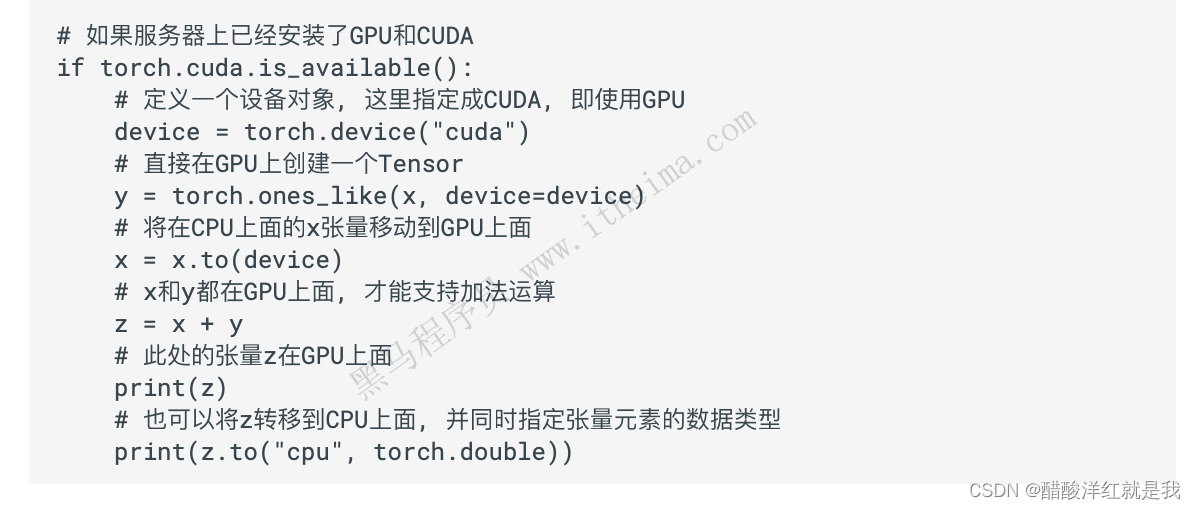
pytorch工具——认识pytorch
目录 pytorch的基本元素操作创建一个没有初始化的矩阵创建一个有初始化的矩阵创建一个全0矩阵并可指定数据元素类型为long直接通过数据创建张量通过已有的一个张量创建相同尺寸的新张量利用randn_like方法得到相同尺寸张量,并且采用随机初始化的方法为其赋值采用.si…...
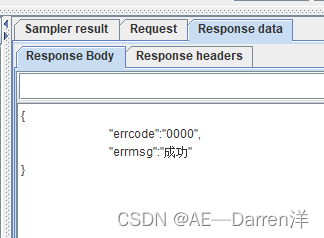
解决Jmeter响应内容显示乱码
一、问题描述 jmeter在执行接口请求后,返回的响应体里面出现乱码现象,尽管在调了对应请求的响应编码也无用,现找到解决办法。 二、解决办法 进入到jmeter的bin目录下,找到jmeter.properties,通过按ctrlF快速定位查找到…...

ChatGPT和搜索引擎哪个更好用
目录 ChatGPT和搜索引擎的概念 ChatGPT和搜索引擎的作用 ChatGPT的作用 搜索引擎的作用 ChatGPT和搜索引擎哪个更好用 总结 ChatGPT和搜索引擎的概念 ChatGPT是一种基于对话的人工智能技术,而搜索引擎则是一种用于在互联网上查找和检索信息的工具。它们各自具…...
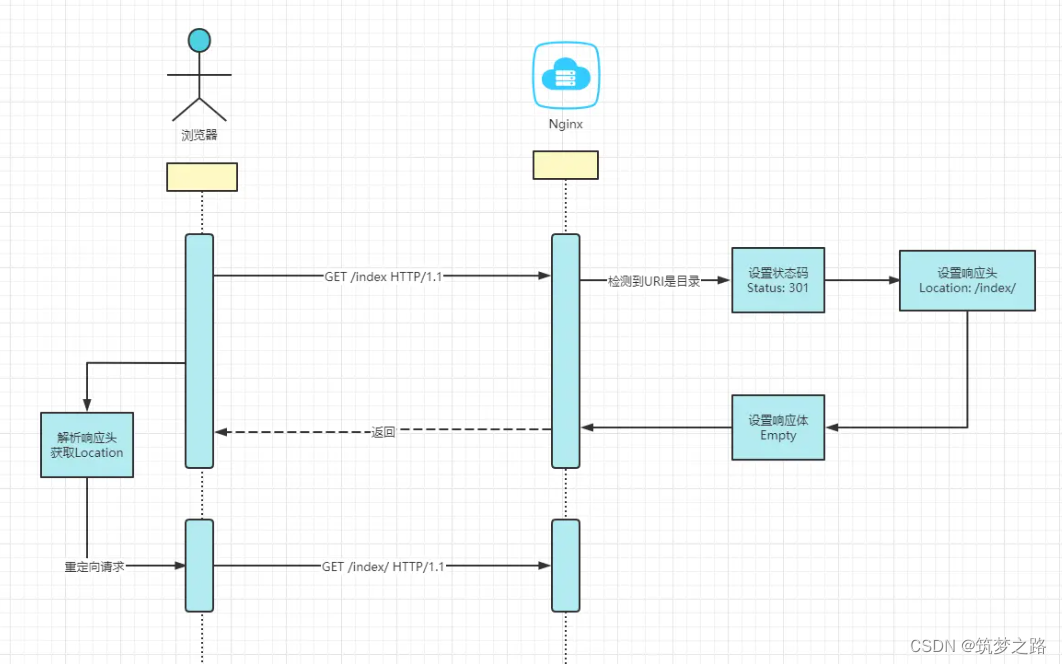
Nginx 301 https跳转后出现跨域和混合内容问题 —— 筑梦之路
问题 在浏览器地址栏敲入url访问静态资源目录时,发现默认跳转到了http协议的地址 如上图所示,客户端https请求先到达API网关,然后网关将请求通过http协议转发到静态资源服务器。 调出浏览器发现客户端发送的https请求收到了一个301状态码的响…...

记录--关于前端的音频可视化-Web Audio
这里给大家分享我在网上总结出来的一些知识,希望对大家有所帮助 背景 最近听音乐的时候,看到各种动效,突然好奇这些音频数据是如何获取并展示出来的,于是花了几天功夫去研究相关的内容,这里只是给大家一些代码实例&…...
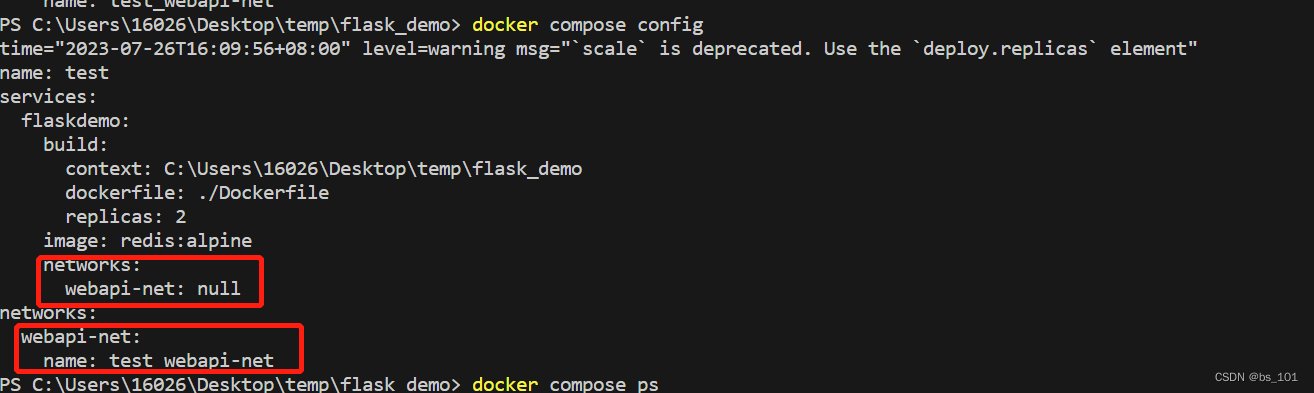
docker-compose yml配置、常用命令
下载完docker-compose后,如果想使用docker-compose命令开头,需要创建软连接 sudo ln -s /usr/local/lib/docker/cli-plugins/docker-compose /usr/bin/docker-compose 1.docker-compose.yml文件编排 一个 docker-compose.yml 文件的顶层元素有ÿ…...
 —— React17+React Hook+TS4 最佳实践,仿 Jira 企业级项目(十三))
【实战】 七、Hook,路由,与 URL 状态管理(下) —— React17+React Hook+TS4 最佳实践,仿 Jira 企业级项目(十三)
文章目录 一、项目起航:项目初始化与配置二、React 与 Hook 应用:实现项目列表三、TS 应用:JS神助攻 - 强类型四、JWT、用户认证与异步请求五、CSS 其实很简单 - 用 CSS-in-JS 添加样式六、用户体验优化 - 加载中和错误状态处理七、Hook&…...

【MySQL】_5.MySQL的联合查询
目录 1. 笛卡尔积 2. 内连接 2.1 示例1:查询许仙同学的成绩 2.2 示例2: 查询所有同学的总成绩,及同学的个人信息 2.3 示例3:查询所有同学的科目及各科成绩,及同学的个人信息 3. 外连接 3.1 情况一:两…...

【后端面经】微服务构架 (1-3) | 熔断:熔断-恢复-熔断-恢复,抖来抖去怎么办?
文章目录 一、前置知识1、什么是熔断?2、什么是限流?3、什么是降级?4、怎么判断微服务出现了问题?A、指标有哪些?B、阈值如何选择?C、超过阈值之后,要不要持续一段时间才触发熔断?5、服务恢复正常二、面试环节1、面试准备2、面试基本思路三、总结 在微服务构架中…...
)
【云原生Java冷启动优化黄金法则】:20年实战提炼的7步精准调优路径(含GraalVM+Quarkus实测数据)
第一章:云原生Java函数计算冷启动问题的本质剖析云原生Java函数计算中的冷启动并非单纯由JVM启动耗时导致,而是多层资源调度与运行时初始化耦合引发的系统性延迟现象。其本质在于函数实例生命周期与请求到达时间的异步解耦——当无活跃实例可用时&#x…...

4个步骤掌握ComfyUI-WanVideoWrapper:从环境搭建到视频生成全攻略
4个步骤掌握ComfyUI-WanVideoWrapper:从环境搭建到视频生成全攻略 【免费下载链接】ComfyUI-WanVideoWrapper 项目地址: https://gitcode.com/GitHub_Trending/co/ComfyUI-WanVideoWrapper ComfyUI-WanVideoWrapper是一款强大的AI视频生成插件,作…...
)
别只盯着心跳了!CANopen主站用SDO还能配置这些关键参数(附PDO映射实例)
别只盯着心跳了!CANopen主站用SDO还能配置这些关键参数(附PDO映射实例) 在工业自动化领域,CANopen协议因其高可靠性和灵活性成为设备互联的首选方案之一。许多工程师对通过SDO(服务数据对象)配置心跳时间已…...

Kronos金融市场基础模型:从技术原理到量化交易系统构建
Kronos金融市场基础模型:从技术原理到量化交易系统构建 【免费下载链接】Kronos Kronos: A Foundation Model for the Language of Financial Markets 项目地址: https://gitcode.com/GitHub_Trending/kronos14/Kronos 金融市场的复杂性和波动性一直是投资者…...

Spring AI实战:从零构建智能聊天与图像生成应用
1. Spring AI初探:你的第一个智能聊天应用 记得第一次接触AI聊天功能时,我盯着那个能对答如流的对话框看了足足十分钟。现在用Spring AI框架,只需要四步就能实现同样的效果。先创建一个标准的Spring Boot项目,这个不用多说&#x…...

别再只会用滑动平均了!用Python从零实现数字陷波器,精准滤除50Hz工频干扰
从零构建Python数字陷波器:精准滤除50Hz工频干扰的工程实践 当你在深夜调试一个心爱的传感器项目时,突然发现采集到的数据波形上叠加了一个顽固的50Hz正弦波——这种经历想必不少硬件开发者都深有体会。工频干扰就像电子世界中的背景噪音,无…...

FastAPI GraphQL 集成:如何在 FastAPI 中轻松使用 GraphQL
FastAPI GraphQL 集成:如何在 FastAPI 中轻松使用 GraphQL 【免费下载链接】fastapi FastAPI framework, high performance, easy to learn, fast to code, ready for production 项目地址: https://gitcode.com/GitHub_Trending/fa/fastapi FastAPI 作为高性…...

解锁RePKG的7个实战维度:从资源提取到合规创作的完整指南
解锁RePKG的7个实战维度:从资源提取到合规创作的完整指南 【免费下载链接】repkg Wallpaper engine PKG extractor/TEX to image converter 项目地址: https://gitcode.com/gh_mirrors/re/repkg 一、问题象限:资源处理的真实困境叙事 1.1 独立游…...

[带AI]基于SpringBoot+Vue的青少年心理健康管理系统设计与实现+文档+指导搭建视频
|前后端分离|Java|SpringBoot|Vue3|Spring AI智能对话一、项目技术栈项目采用技术:① 架构模式:前后端分离开发② 系统环境:Windows、Mac③ 开发环境:IDEA、JDK21、MySQL…...

避坑指南:思科模拟器做链路聚合时,你可能会遇到的5个报错及解决方法
思科模拟器链路聚合实战:5个典型报错分析与精准排错指南 在Packet Tracer中配置链路聚合时,最令人头疼的往往不是基础配置步骤,而是那些突如其来的报错信息。上周有位学员在CCNA备考群里发了一张截图:%EC-5-CANNOT_BUNDLE2: Fa0/2…...