图像处理之hough圆形检测
hough检测原理
点击图像处理之Hough变换检测直线查看
下面直接描述检测圆形的方法
基于Hough变换的圆形检测方法
对于一个半径为 r r r,圆心为 ( a , b ) (a,b) (a,b)的圆,我们将其表示为:
( x − a ) 2 + ( y − b ) 2 = r 2 (x-a)^2+(y-b)^2=r^2 (x−a)2+(y−b)2=r2
此时 x = [ x , y ] T , a = [ a , b , r ] T x=[x,y]^T,a=[a,b,r]^T x=[x,y]T,a=[a,b,r]T,其参数空间为三维。显然,图像空间上的一点 ( x , y ) (x,y) (x,y),在参数空间中对应着一个圆锥,如下图所示。
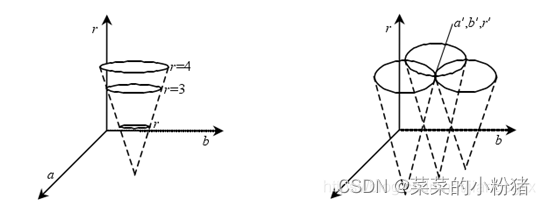
而图像空间的一个圆就对应着这一簇圆锥相交的一个点,这个特定点在参数空间的三维参数一定,就表示一定半径一定圆心坐标的图像空间的那个圆。
上述方法是经典的Hough圆检测方法的原理,它具有精度高,抗干扰能力强等优点,但由于该方法的参数空间为三维,要在三维空间上进行证据累计的话,需要的时间和空间都是庞大的,在实际应用中不适用。为加快Hough变换检测圆的速度,学者们进行了大量研究,也出现了很多改进的Hough变换检测圆的方法。如利用图像梯度信息的Hough变换,对圆的标准方程对x求导得到下式:
2 ( x − a ) + 2 ( y − b ) d y d x = 0 2(x-a)+2(y-b)\frac{dy}{dx}=0 2(x−a)+2(y−b)dxdy=0
从上式看出,此时的参数空间从半径 r r r,圆心 ( a , b ) (a,b) (a,b)三维,变成了只有圆心 ( a , b ) (a,b) (a,b)的二维空间,利用这种方法检测圆其计算量明显减少了。
但这种改进的Hough变换检测圆的方法其检测精度并不高,原因在于,此种方法利用了边界斜率。
从本质上讲,边界斜率其实是用曲线在某一点的弦的斜率来代替的,这种情况下,要保证不存在误差,只有在弦长为零的情况。但在数字图像中,曲线的表现形式是离散的,其在某一点处的斜率指的是此点右向n步斜率或是左向n步斜率。如果弦长过小了,斜率的量化误差就会增大。这种方法比较适用于干扰较少的完整圆形目标。

主要代码:
def AHTforCircles(edge,center_threhold_factor = None,score_threhold = None,min_center_dist = None,minRad = None,maxRad = None,center_axis_scale = None,radius_scale = None,halfWindow = None,max_circle_num = None):if center_threhold_factor == None:center_threhold_factor = 10.0if score_threhold == None:score_threhold = 15.0if min_center_dist == None:min_center_dist = 80.0if minRad == None:minRad = 0.0if maxRad == None:maxRad = 1e7*1.0if center_axis_scale == None:center_axis_scale = 1.0if radius_scale == None:radius_scale = 1.0if halfWindow == None:halfWindow = 2if max_circle_num == None:max_circle_num = 6min_center_dist_square = min_center_dist**2sobel_kernel_y = np.array([[-1.0, -2.0, -1.0], [0.0, 0.0, 0.0], [1.0, 2.0, 1.0]])sobel_kernel_x = np.array([[-1.0, 0.0, 1.0], [-2.0, 0.0, 2.0], [-1.0, 0.0, 1.0]])edge_x = convolve(sobel_kernel_x,edge,[1,1,1,1],[1,1])edge_y = convolve(sobel_kernel_y,edge,[1,1,1,1],[1,1])center_accumulator = np.zeros((int(np.ceil(center_axis_scale*edge.shape[0])),int(np.ceil(center_axis_scale*edge.shape[1]))))k = np.array([[r for c in range(center_accumulator.shape[1])] for r in range(center_accumulator.shape[0])])l = np.array([[c for c in range(center_accumulator.shape[1])] for r in range(center_accumulator.shape[0])])minRad_square = minRad**2maxRad_square = maxRad**2points = [[],[]]edge_x_pad = np.pad(edge_x,((1,1),(1,1)),'constant')edge_y_pad = np.pad(edge_y,((1,1),(1,1)),'constant')Gaussian_filter_3 = 1.0 / 16 * np.array([(1.0, 2.0, 1.0), (2.0, 4.0, 2.0), (1.0, 2.0, 1.0)])for i in range(edge.shape[0]):for j in range(edge.shape[1]):if not edge[i,j] == 0:dx_neibor = edge_x_pad[i:i+3,j:j+3]dy_neibor = edge_y_pad[i:i+3,j:j+3]dx = (dx_neibor*Gaussian_filter_3).sum()dy = (dy_neibor*Gaussian_filter_3).sum()if not (dx == 0 and dy == 0):t1 = (k/center_axis_scale-i)t2 = (l/center_axis_scale-j)t3 = t1**2 + t2**2temp = (t3 > minRad_square)&(t3 < maxRad_square)&(np.abs(dx*t1-dy*t2) < 1e-4)center_accumulator[temp] += 1points[0].append(i)points[1].append(j)M = center_accumulator.mean()for i in range(center_accumulator.shape[0]):for j in range(center_accumulator.shape[1]):neibor = \center_accumulator[max(0, i - halfWindow + 1):min(i + halfWindow, center_accumulator.shape[0]),max(0, j - halfWindow + 1):min(j + halfWindow, center_accumulator.shape[1])]if not (center_accumulator[i,j] >= neibor).all():center_accumulator[i,j] = 0# 非极大值抑制plt.imshow(center_accumulator,cmap='gray')plt.axis('off')plt.show()center_threshold = M * center_threhold_factorpossible_centers = np.array(np.where(center_accumulator > center_threshold)) # 阈值化sort_centers = []for i in range(possible_centers.shape[1]):sort_centers.append([])sort_centers[-1].append(possible_centers[0,i])sort_centers[-1].append(possible_centers[1,i])sort_centers[-1].append(center_accumulator[sort_centers[-1][0],sort_centers[-1][1]])sort_centers.sort(key=lambda x:x[2],reverse=True)centers = [[],[],[]]points = np.array(points)for i in range(len(sort_centers)):radius_accumulator = np.zeros((int(np.ceil(radius_scale * min(maxRad, np.sqrt(edge.shape[0] ** 2 + edge.shape[1] ** 2)) + 1))),dtype=np.float32)if not len(centers[0]) < max_circle_num:breakiscenter = Truefor j in range(len(centers[0])):d1 = sort_centers[i][0]/center_axis_scale - centers[0][j]d2 = sort_centers[i][1]/center_axis_scale - centers[1][j]if d1**2 + d2**2 < min_center_dist_square:iscenter = Falsebreakif not iscenter:continuetemp = np.sqrt((points[0,:] - sort_centers[i][0] / center_axis_scale) ** 2 + (points[1,:] - sort_centers[i][1] / center_axis_scale) ** 2)temp2 = (temp > minRad) & (temp < maxRad)temp = (np.round(radius_scale * temp)).astype(np.int32)for j in range(temp.shape[0]):if temp2[j]:radius_accumulator[temp[j]] += 1for j in range(radius_accumulator.shape[0]):if j == 0 or j == 1:continueif not radius_accumulator[j] == 0:radius_accumulator[j] = radius_accumulator[j]*radius_scale/np.log(j) #radius_accumulator[j]*radius_scale/jscore_i = radius_accumulator.argmax(axis=-1)if radius_accumulator[score_i] < score_threhold:iscenter = Falseif iscenter:centers[0].append(sort_centers[i][0]/center_axis_scale)centers[1].append(sort_centers[i][1]/center_axis_scale)centers[2].append(score_i/radius_scale)centers = np.array(centers)centers = centers.astype(np.float64)return centers代码效果:

全部代码可见本人GitHub仓库,如果代码有用,please click star and watching
hough检测之前需要canny算子检测基础的边缘,点击这里可以查看有关canny算法相关内容
如果本文对你有帮助,关注加点赞!!!!!
相关文章:
图像处理之hough圆形检测
hough检测原理 点击图像处理之Hough变换检测直线查看 下面直接描述检测圆形的方法 基于Hough变换的圆形检测方法 对于一个半径为 r r r,圆心为 ( a , b ) (a,b) (a,b)的圆,我们将…...
 vue3+vite+ts)
el-upload文件上传(只能上传一个文件且再次上传替换上一个文件) vue3+vite+ts
组件: <template><el-upload class"upload-demo" v-model:file-list"fileList" ref"uploadDemo" action"/public-api/api/file" multiple:on-preview"handlePreview" :on-remove"handleRemove&quo…...

随手笔记——根据点对来估计相机的运动综述
随手笔记——根据点对来估计相机的运动综述 说明计算相机运动 说明 简单介绍3种情况根据点对来估计相机运动所使用的方法 计算相机运动 有了匹配好的点对,接下来,要根据点对来估计相机的运动。这里由于相机的原理不同分为: 当相机为单目时…...

ip校园广播音柱特点
ip校园广播音柱特点IP校园广播音柱是一种基于IP网络技术的音频播放设备,广泛应用于校园、商业区、公共场所等地方。它可以通过网络将音频信号传输到不同的音柱设备,实现远程控制和集中管理。IP校园广播音柱具备以下特点和功能:1. 网络传输&am…...
用 Node.js 手写 WebSocket 协议
目录 引言 从 http 到 websocekt 的切换 Sec-WebSocket-Key 与 Sec-WebSocket-Accept 全新的二进制协议 自己实现一个 websocket 服务器 按照协议格式解析收到的Buffer 取出opcode 取出MASK与payload长度 根据mask key读取数据 根据类型处理数据 frame 帧 数据的发…...
Xilinx AXI VIP使用教程
AXI接口虽然经常使用,很多同学可能并不清楚Vivado里面也集成了AXI的Verification IP,可以当做AXI的master、pass through和slave,本次内容我们看下AXI VIP当作master时如何使用。 新建Vivado工程,并新建block design,命…...

mysql主主架构搭建,删库恢复
mysql主主架构搭建,删库恢复 搭建mysql主主架构环境信息安装msql服务mysql1mysql2设置mysql2同步mysql1设置mysql1同步mysql2授权测试用账户 安装配置keepalivedmysql1检查脚本mysql2检查脚本 备份策略mysqldump全量备份mysqldump增量备份数据库目录全量备份 删除my…...

pythonweek1
引言 做任何事情都要脚踏实地,虽然大一上已经学习了python的基础语法,大一下也学习了C加加中的类与对象,但是自我觉得基础还不太扎实,又害怕有什么遗漏,所以就花时间重新学习了python的基础,学习Python的基…...
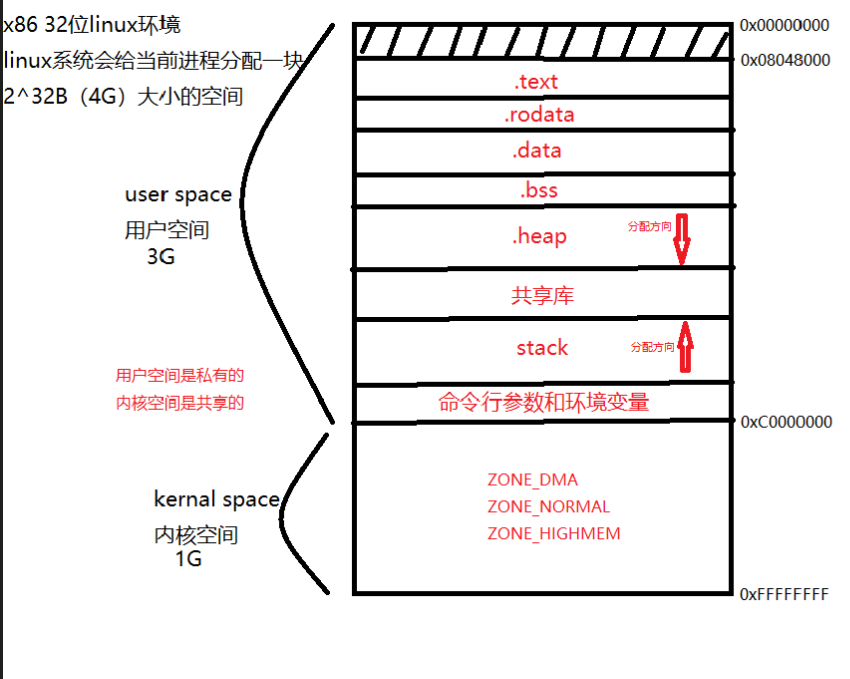
进程虚拟地址空间区域划分
目录 图示 详解 代码段 备注:x86 32位linux环境下,进程虚拟地址空间区域划分 图示 详解 用户空间 用于存储用户进程代码和数据,只能由用户进程访问 内核空间 用于存储操作系统内核代码和数据,只能由操作系统内核访问 text t…...
OpenAI Code Interpreter 的开源实现:GPT Code UI
本篇文章聊聊 OpenAI Code Interpreter 的一众开源实现方案中,获得较多支持者,但暂时还比较早期的项目:GPT Code UI。 写在前面 这篇文章本该更早的时候发布,但是 LLaMA2 发布后实在心痒难忍,于是就拖了一阵。结合 L…...

macOS Ventura 13.5 (22G74) 正式版发布,ISO、IPSW、PKG 下载
macOS Ventura 13.5 (22G74) 正式版发布,ISO、IPSW、PKG 下载 本站下载的 macOS Ventura 软件包,既可以拖拽到 Applications(应用程序)下直接安装,也可以制作启动 U 盘安装,或者在虚拟机中启动安装。另外也…...

Electron 主进程和渲染进程传值及窗口间传值
1 渲染进程调用主进程得方法 下面是渲染进程得代码: let { ipcRenderer} require( electron ); ipcRenderer.send( xxx ); //渲染进程中调用 下面是主进程得代码: var { ipcMain } require( electron ); ipcMain.on("xxx",function () { } )...

C#设计模式之---建造者模式
建造者模式(Builder Pattern) 建造者模式(Builder Pattern)是将一个复杂对象的构建与它的表示分离,使得同样的构建过程可以创建不同的表示。建造者模式使得建造代码与表示代码的分离,可以使客户端不必知道…...
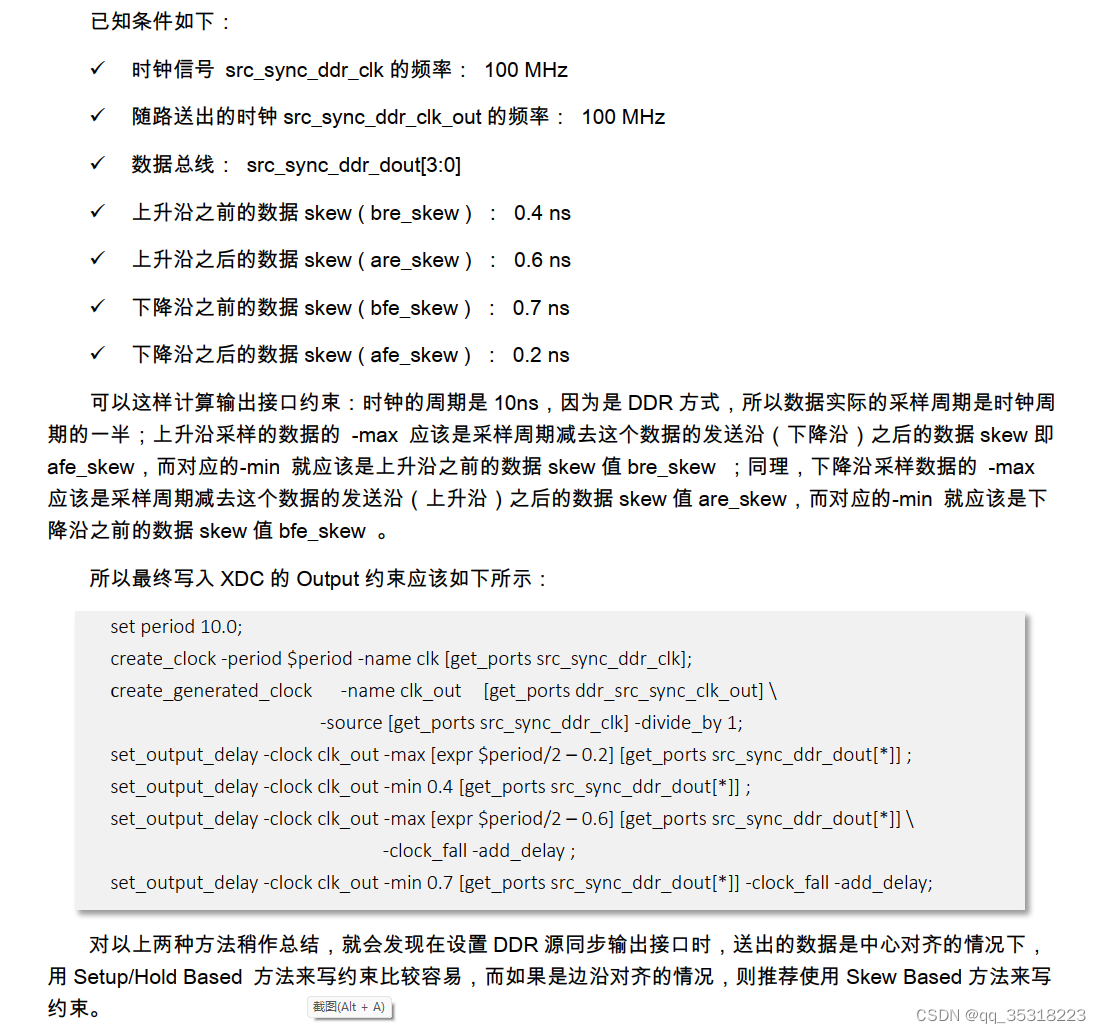
output delay 约束
output delay 约束 一、output delay约束概述二、output delay约束系统同步三、output delay约束源同步 一、output delay约束概述 特别注意:在源同步接口中,定义接口约束之前,需要用create_generated_clock 先定义送出的随路时钟。 二、out…...

html2Canvas+jsPDF 下载PDF 遇到跨域的对象存储的图片无法显示
一、问题原因 对象存储的域名和你网址的域名不一样,此时用Canvas相关插件 将DOM元素转化为PDF,就会出现跨域错误。 二、解决办法 两步 1. 图片元素上设置属性 crossorigin"anonymous" 支持原生img和eleme组件 2. 存储桶设置资源跨域访问…...
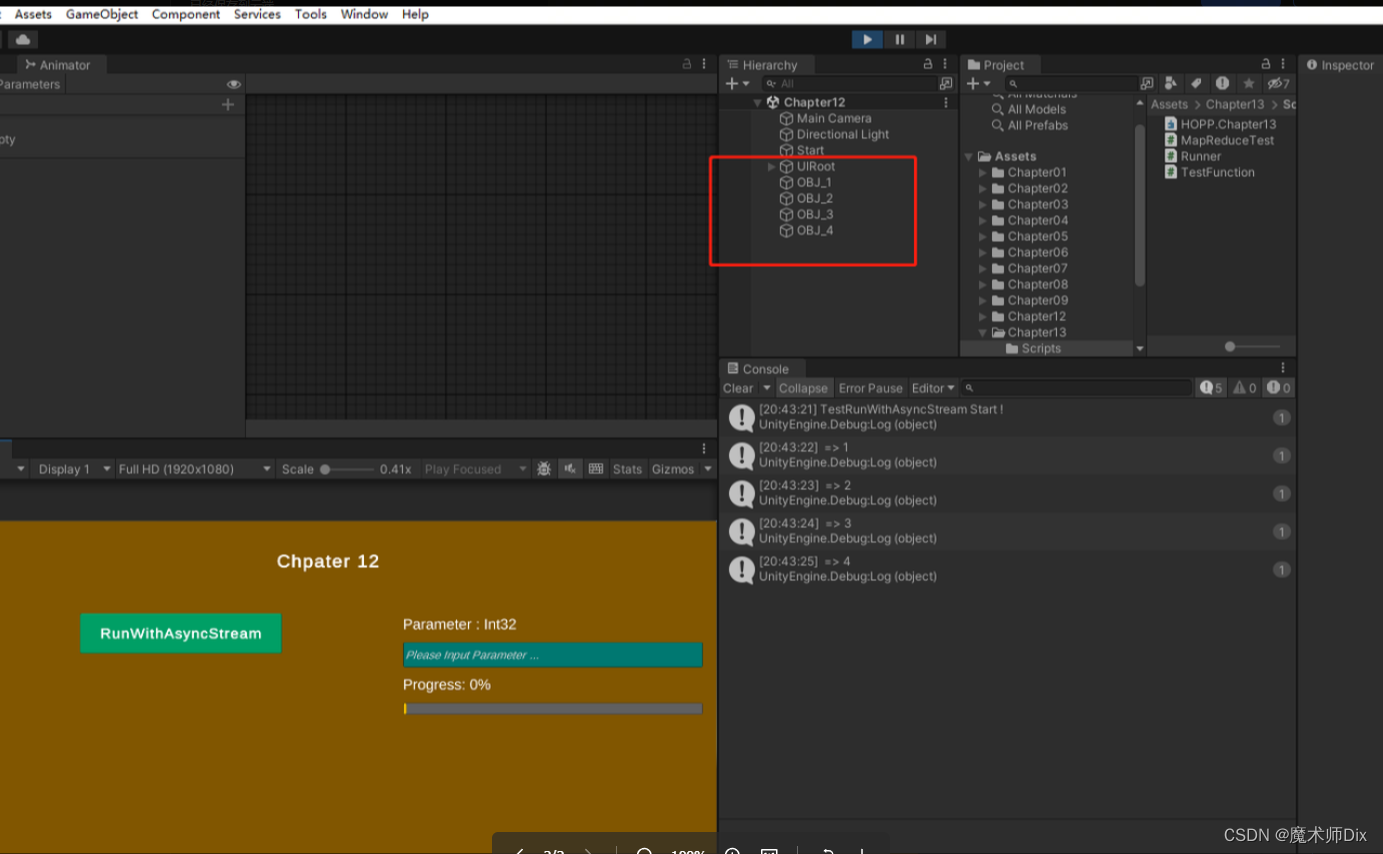
【C#】并行编程实战:异步流
本来这章该讲的是 ASP .NET Core 中的 IIS 和 Kestrel ,但是我看了下这个是给服务器用的。而我只是个 Unity 客户端程序,对于服务器的了解趋近于零。 鉴于我对服务器知识和需求的匮乏,这里就不讲原书(大部分)内容了。本…...
在家下载论文使用哪些论文下载工具比较好
在家下载论文如果不借助论文下载工具是非常艰难的事情,因为很多查找下载论文的数据库都是需要账号权限才可使用的。 例如,我们查找中文论文常用的知网、万方等数据库以及众多国外论文数据库。 在家下载知网、万方数据库论文可用下面的方法:…...

【LeetCode 算法】Handling Sum Queries After Update 更新数组后处理求和查询-Segment Tree
文章目录 Handling Sum Queries After Update 更新数组后处理求和查询问题描述:分析代码线段树 Tag Handling Sum Queries After Update 更新数组后处理求和查询 问题描述: 给你两个下标从 0 开始的数组 n u m s 1 和 n u m s 2 nums1 和 nums2 nums1…...

基于Linux操作系统中的MySQL数据库SQL语句(三十一)
MySQL数据库SQL语句 目录 一、SQL语句类型 1、DDL 2、DML 3、DCL 4、DQL 二、数据库操作 1、查看 2、创建 2.1、默认字符集 2.2、指定字符集 3、进入 4、删除 5、更改 6、练习 三、数据表操作 (一)数据类型 1、数值类型 1.1、TINYINT …...
)
【Matlab】基于BP神经网络的数据回归预测新数据(Excel可直接替换数据)
【Matlab】基于BP神经网络的数据回归预测新数据(Excel可直接替换数据) 1.模型原理2.数学公式3.文件结构4.Excel数据5.分块代码5.1 main.m5.2 NewData.m6.完整代码6.1 main.m6.2 NewData.m7.运行结果1.模型原理 基于BP神经网络的数据回归预测是一种常见的机器学习方法,用于处…...

别再只调参了!用Open3D搞定点云凹凸检测,从数学原理到Python代码的保姆级避坑指南
点云凹凸检测实战:从数学本质到Open3D高效实现 点云处理中的凹凸缺陷检测一直是工业质检、三维重建等领域的核心难题。很多工程师习惯性地把问题归结为"参数没调好",却忽略了背后的数学本质和算法选择逻辑。本文将带您跳出调参陷阱࿰…...

利用快马平台五分钟搭建openclaw部署原型,验证核心功能
最近在折腾一个开源机器人抓取框架openclaw,想快速验证它的核心功能。但传统部署流程实在太繁琐——要配环境、装依赖、调试各种版本冲突,经常花半天时间还没跑通。后来发现InsCode(快马)平台能一键生成部署原型,五分钟就搞定了测试环境&…...

<最小生成树> 1349:【例4-10】最优布线问题
1349:【例4-10】最优布线问题时间限制: 1000 ms 内存限制: 65536 KB 提交数:12074 通过数: 7598【题目描述】学校有n台计算机,为了方便数据传输,现要将它们用数据线连接起来。两台计算机被连接是指它们有数据线连接。由于计算机所…...

YimMenu深度解析:GTA V游戏修改工具的核心机制与实战指南
YimMenu深度解析:GTA V游戏修改工具的核心机制与实战指南 【免费下载链接】YimMenu YimMenu, a GTA V menu protecting against a wide ranges of the public crashes and improving the overall experience. 项目地址: https://gitcode.com/GitHub_Trending/yi/Y…...
)
STM32定时器编码器模式实战:5分钟搞定电机转速与转向测量(附常见波形问题排查)
STM32定时器编码器模式实战:5分钟搞定电机转速与转向测量(附常见波形问题排查) 在机器人控制和自动化项目中,电机转速和转向的精确测量往往是系统闭环控制的基础。传统软件计数方式不仅占用CPU资源,还容易因中断延迟导…...

终极指南:如何使用Polly.JS实现API版本控制与路径重写
终极指南:如何使用Polly.JS实现API版本控制与路径重写 【免费下载链接】pollyjs Record, Replay, and Stub HTTP Interactions. 项目地址: https://gitcode.com/gh_mirrors/po/pollyjs Polly.JS是一款强大的HTTP交互录制、重放和存根工具,能够帮助…...

LDDC:开源歌词工具的高效解决方案
LDDC:开源歌词工具的高效解决方案 【免费下载链接】LDDC 简单易用的精准歌词(逐字歌词/卡拉OK歌词)下载匹配工具|A simple and user-friendly tool for downloading and matching precise lyrics (word-by-word lyrics/Karaoke lyrics) 项目地址: https://gitcode…...

告别野火原子,用江科大STM32F103模板+Keil5,30分钟搞定RT-Thread Nano 3.0.3移植
江科大STM32F103模板Keil5快速移植RT-Thread Nano 3.0.3实战指南 如果你正在使用江科大的STM32F103教学模板,想要快速实现RT-Thread Nano 3.0.3的移植,这篇文章将为你提供一个30分钟完成的详细方案。相比野火、正点原子等开发板,江科大模板在…...

MT5 Zero-Shot中文文本增强企业应用:提升标注效率50%实测报告
MT5 Zero-Shot中文文本增强企业应用:提升标注效率50%实测报告 1. 引言:当数据标注成为AI落地的瓶颈 想象一下这个场景:你的AI团队开发了一个智能客服模型,需要大量高质量的对话数据进行训练。数据工程师们夜以继日地标注数据&am…...
)
别再手动一个个点了!用Labelme批量标注关键点数据的3个高效技巧(附快捷键设置)
别再手动一个个点了!用Labelme批量标注关键点数据的3个高效技巧(附快捷键设置) 在计算机视觉项目的关键点标注任务中,效率往往是决定项目进度的关键因素。我曾参与过一个包含5000张图像的人体姿态估计项目,最初采用传…...