[Tools: Camera Conventions] NeRF中的相机矩阵估计
参考:NeRF代码解读-相机参数与坐标系变换 - 知乎
- 在NeRF中,一个重要的步骤是确定射线(rays)的初始点和方向。
- 根据射线的初始点和方向,和设定射线深度和采样点数量,可以估计该射线成像的像素值。
- 估计得到的像素值,在训练中用于计算损失更新参数,在测试中用于渲染图像。
相机矩阵包含内参和外参矩阵:
- 计算相机坐标系在图片坐标系中的坐标:相机内参矩阵;
- 计算世界坐标系在相机坐标系中的坐标:相机外参矩阵。
确定射线的初始点和方向,通常是上述过程的逆过程,通常包含两个步骤:
- 计算图片坐标系在相机坐标系中的坐标;
- 计算相机坐标系在世界坐标系中的坐标:c2w矩阵。
目录
1. 计算c2w矩阵
2. 根据相机内参,计算射线在相机坐标系下的方向
3. 根据c2w矩阵和相机坐标系下的方向,计算射线在世界坐标系下的方向和初始位置
1. 计算c2w矩阵
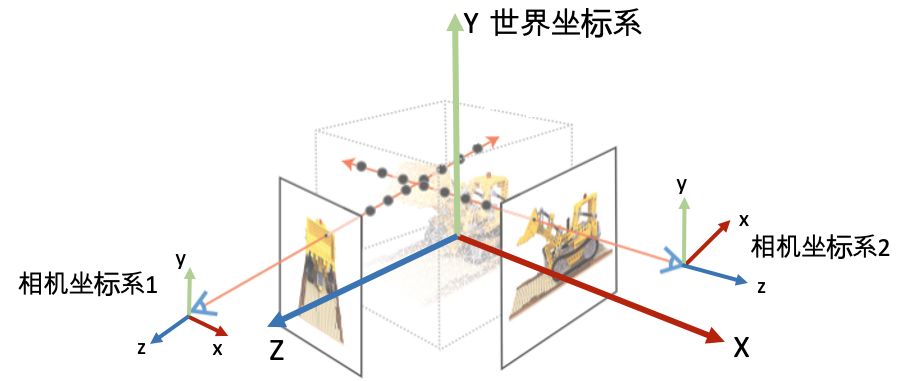
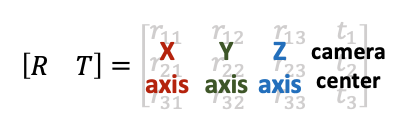
在NeRF中,通常使用相机外参矩阵的逆矩阵,也即:camera-to-world (c2w)矩阵。c2w矩阵左乘相机坐标系下的坐标,即可得到世界坐标系下的坐标。给定世界坐标系和相机坐标系,可以计算c2w矩阵:
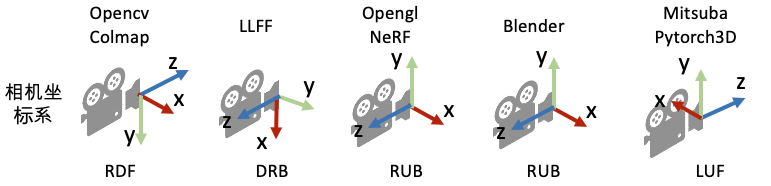
以上图的世界坐标系和NeRF中使用的相机坐标系为例:
- 根据给定的相机的elevation, azimuth和camera_distance,计算相机在世界坐标系下的坐标;
- 根据相机在世界坐标系下的坐标,计算相机的朝向;
- 根据相机在世界坐标系下的坐标和朝向(X_C, Y_C, Z_C),组成c2w矩阵。
# elevation: X_W -> Y_W
# azimuth: X_w -> Z_W
# camera_distance: 相机距离原点的距离
# camera_position的顺序是(x, y, z)camera_positions = torch.stack([camera_distance * torch.cos(elevation) * torch.cos(azimuth),camera_distance * torch.sin(elevation),camera_distance * torch.cos(elevation) * torch.sin(azimuth),],dim=-1,
)
# default scene center at origin
center = torch.zeros_like(camera_positions)
# default camera up direction as +z
up = torch.as_tensor([0, 1, 0], dtype=torch.float32)
# fovy = torch.tensor(fovy_deg * math.pi / 180, dtype=torch.float32)lookat = F.normalize(center - camera_positions, dim=-1)
right = F.normalize(torch.cross(lookat, up), dim=-1)
up = F.normalize(torch.cross(right, lookat), dim=-1)
# default setting
c2w3x4 = torch.cat([torch.stack([right, up, -lookat], dim=-1), camera_positions[:, None]],dim=-1,
)c2w = torch.cat([c2w3x4, torch.zeros_like(c2w3x4[:1])], dim=0
)
c2w[3, 3] = 1.02. 根据相机内参,计算射线在相机坐标系下的方向
之后根据fovy/focal length,以及图片height和width确定相机内参矩阵(没有标准化):
def get_ray_directions(H: int,W: int,focal: Union[float, Tuple[float, float]],principal: Optional[Tuple[float, float]] = None,use_pixel_centers: bool = True,
) -> Float[Tensor, "H W 3"]:"""Get ray directions for all pixels in camera coordinate.Reference: https://www.scratchapixel.com/lessons/3d-basic-rendering/ray-tracing-generating-camera-rays/standard-coordinate-systemsInputs:H, W, focal, principal, use_pixel_centers: image height, width, focal length, principal point and whether use pixel centersOutputs:directions: (H, W, 3), the direction of the rays in camera coordinate"""pixel_center = 0.5 if use_pixel_centers else 0if isinstance(focal, float):fx, fy = focal, focalcx, cy = W / 2, H / 2else:fx, fy = focalassert principal is not Nonecx, cy = principali, j = torch.meshgrid(torch.arange(W, dtype=torch.float32) + pixel_center,torch.arange(H, dtype=torch.float32) + pixel_center,indexing="xy",)directions: Float[Tensor, "H W 3"] = torch.stack([(i - cx) / fx, -(j - cy) / fy, -torch.ones_like(i)], -1)return directions# 相机内参矩阵
intrinsic = torch.tensor([[focal_length * width, 0, 0.5 * width], [0, focal_length * height, 0.5 * height], [0, 0, 1]]
)# 计算射线方向
directions = get_ray_directions(height, width,(intrinsic[0, 0], intrinsic[1, 1]),(intrinsic[0, 2], intrinsic[1, 2]),use_pixel_centers=False)3. 根据c2w矩阵和相机坐标系下的方向,计算射线在世界坐标系下的方向和初始位置
def get_rays(directions: Float[Tensor, "... 3"],c2w: Float[Tensor, "... 4 4"],keepdim=False,noise_scale=0.0,
) -> Tuple[Float[Tensor, "... 3"], Float[Tensor, "... 3"]]:# Rotate ray directions from camera coordinate to the world coordinateassert directions.shape[-1] == 3if directions.ndim == 2: # (N_rays, 3)if c2w.ndim == 2: # (4, 4)c2w = c2w[None, :, :]assert c2w.ndim == 3 # (N_rays, 4, 4) or (1, 4, 4)rays_d = (directions[:, None, :] * c2w[:, :3, :3]).sum(-1) # (N_rays, 3)rays_o = c2w[:, :3, 3].expand(rays_d.shape)elif directions.ndim == 3: # (H, W, 3)assert c2w.ndim in [2, 3]if c2w.ndim == 2: # (4, 4)rays_d = (directions[:, :, None, :] * c2w[None, None, :3, :3]).sum(-1) # (H, W, 3)rays_o = c2w[None, None, :3, 3].expand(rays_d.shape)elif c2w.ndim == 3: # (B, 4, 4)rays_d = (directions[None, :, :, None, :] * c2w[:, None, None, :3, :3]).sum(-1) # (B, H, W, 3)rays_o = c2w[:, None, None, :3, 3].expand(rays_d.shape)elif directions.ndim == 4: # (B, H, W, 3)assert c2w.ndim == 3 # (B, 4, 4)rays_d = (directions[:, :, :, None, :] * c2w[:, None, None, :3, :3]).sum(-1) # (B, H, W, 3)rays_o = c2w[:, None, None, :3, 3].expand(rays_d.shape)# add camera noise to avoid grid-like artifect# https://github.com/ashawkey/stable-dreamfusion/blob/49c3d4fa01d68a4f027755acf94e1ff6020458cc/nerf/utils.py#L373if noise_scale > 0:rays_o = rays_o + torch.randn(3, device=rays_o.device) * noise_scalerays_d = rays_d + torch.randn(3, device=rays_d.device) * noise_scalerays_d = F.normalize(rays_d, dim=-1)if not keepdim:rays_o, rays_d = rays_o.reshape(-1, 3), rays_d.reshape(-1, 3)return rays_o, rays_d
rays_o, rays_d = get_rays(directions, c2w.unsqueeze(0), keepdim=True)相关文章:
[Tools: Camera Conventions] NeRF中的相机矩阵估计
参考:NeRF代码解读-相机参数与坐标系变换 - 知乎 在NeRF中,一个重要的步骤是确定射线(rays)的初始点和方向。根据射线的初始点和方向,和设定射线深度和采样点数量,可以估计该射线成像的像素值。估计得到的…...
【sgUpload】自定义上传组件,支持上传文件夹及其子文件夹文件、批量上传,批量上传会有右下角上传托盘出现,支持本地上传图片转换为Base64image
特性: 支持批量上传文件、文件夹可自定义headers可自定义过滤上传格式可自定义上传API接口支持drag属性开启可拖拽上传文件、文件夹 sgUpload源码 <template><div :class"$options.name" :dragenter"isDragenter"><!-- 上传按钮…...

Kafka 实时处理Stream与Batch的对比分析
Kafka 实时处理Stream与Batch的对比分析 一、简介1. Kafka的定义和特点2. Kafka实时处理基础架构 二、Stream和Batch1. Stream和Batch的区别2. 对比Stream和Batch的优缺点Stream的优缺点Batch的优缺点 三、使用场景1. 使用场景对比Batch使用场景Stream使用场景 2. 如何选择Stre…...

Andriod开发性能优化实践
文章目录 内存优化布局优化网络优化图片优化内存泄露绘制优化 内存优化 在Android开发中,有一些实践可以帮助进行内存优化,以减少应用程序的内存占用和提高性能。以下是一些常见的内存优化实践: 使用合适的数据结构和集合:选择合…...

linux环境安装mysql数据库
一:查看是否自带mariadb数据库 命令:rpm -qa | grep mariadb 如果自带数据库则卸载掉重新安装 命令:yum remove mariadb-connector-c-3.1.11-2.el8_3.x86_64 二:将压缩文件上传到/user/local/mysql文件夹 或者直接下载 命令&a…...

【深度学习中常见的优化器总结】SGD+Adagrad+RMSprop+Adam优化算法总结及代码实现
文章目录 一、SGD,随机梯度下降1.1、算法详解1)MBSGD(Mini-batch Stochastic Gradient Descent)2)动量法:momentum3)NAG(Nesterov accelerated gradient)4)权重衰减项(we…...

山东大学软件学院考试回忆——大二上
文章目录 学习科目整体回忆上课考试回忆Web技术大学物理概率与统计计算机组织与结构离散数学(2)数据结构(双语) 学习科目 Web技术大学物理概率与统计计算机组织与结构离散数学(2)(双语…...

【Express.js】异常分类和日志分级
异常分类和日志分级 第一章已经介绍过全局的异常处理了,但之前的做法过于简单,一股脑的捕获并返回。这一节我们将对异常进行细致的分类,并且日志也做标准化的分级。 准备工作 一个基础的 evp-express 项目 NodeJS Error 先了解一下 Node…...
k8s webhook实例,java springboot程序实现 对Pod创建请求添加边车容器 ,模拟istio实现日志文件清理
k8s webhook实例,java springboot程序实现 对Pod创建请求添加边车容器 ,模拟istio实现日志文件清理 大纲 背景与原理实现流程开发部署my-docker-demo-sp-user服务模拟业务项目开发部署my-sidecar服务模拟边车程序开发部署服务my-docker-demo-k8s-opera…...

关于electron的问题汇总
1. electron-builder打包慢出错的问题 由于网络原因,在进行builder打包时,可能会等很长时间,直到最后还是以失败告终。 如果是第一次进行builder打包,会去下载winCodeSign、nsis、nsis-resources,往往都是第一个就卡住…...
ps 给衣服换色
可以通过色相饱和度来改变颜色 但如果要加强对比 可以通过色阶或曲线来调整 针对整体 调整图层-色相/饱和度 着色 给整个画面上色 选区-遮罩-取出来 然后调整图层-色相/饱和度也可以 或者以有图层-色相饱和度后 选区 按ctrli使其遮罩 同时按alt鼠标左键单机 ctrli反相…...

AI人工智能未来在哪里?2023年新兴产业人工智能有哪些就业前景?
AI人工智能未来在哪里?2023年新兴产业人工智能有哪些就业前景? 随着科技的不断发展,人工智能技术也在不断地进步。在数字化时代,人工智能技术已经渗透到了我们生活的各个方面。2023年为止中国产业80%已经实现半自动化,…...
组件间通信案例练习
1.实现父传子 App.vue <template><div class"app"><tab-control :titles["衣服","鞋子","裤子"]></tab-control><tab-control :titles["流行","最新","优选","数码&q…...

【matlab】机器人工具箱快速上手-正运动学仿真(代码直接复制可用)
安装好机器人工具箱,代码复制可用,按需修改参数 1.建模 %%%%%%%%SCARA机器人仿真模型 l[0.457 0.325]; L(1) Link(d,0,a,l(1),alpha,0,standard,qlim,[-130 130]*pi/180);%连杆1 L(2)Link(d,0,a,l(2),alpha,pi,standard,qlim,[-145 145]*pi/180);%连杆…...
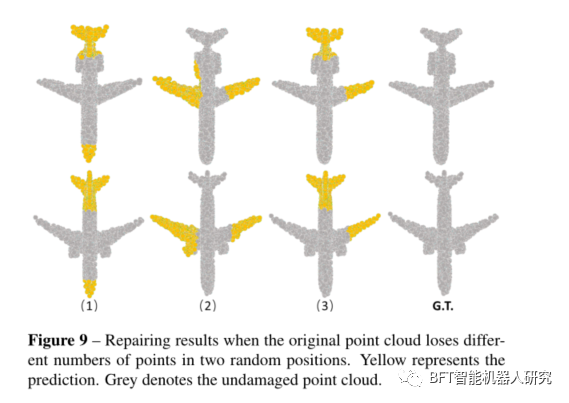
论文解读|PF-Net:用于 3D 点云补全的点分形网络
原创 | 文 BFT机器人 01 背景 从激光雷达等设备中获取的点云往往有所缺失(反光、遮挡等),这给点云的后续处理带来了一定的困难,也凸显出点云补全作为点云预处理方法的重要性。 点云补全(Point Cloud Completion&#x…...
网络安全(零基础)自学
一、网络安全基础知识 1.计算机基础知识 了解了计算机的硬件、软件、操作系统和网络结构等基础知识,可以帮助您更好地理解网络安全的概念和技术。 2.网络基础知识 了解了网络的结构、协议、服务和安全问题,可以帮助您更好地解决网络安全的原理和技术…...

Spring Security 身份验证的基本类/架构
目录 1、SecurityContextHolder 核心类 2、SecurityContext 接口 3、Authentication 用户认证信息接口 4、GrantedAuthority 拥有权限接口 5、AuthenticationManager 身份认证管理器接口 6、ProviderManager 身份认证管理器的实现 7、AuthenticationProvider 特定类型的…...
市值超300亿美金,SaaS独角兽Veeva如何讲好中国故事?
“全球前50的药企,有47家正在使用Veeva。” 提到Veeva Systems(以下简称“Veeva”),可能很多人并不熟悉。但是生命科学业内人士都知道,Veeva是全球头部的行业SaaS服务商。以“为生命科学行业构建行业云”为使命&#x…...

编译内联导致内存泄漏的问题定位修复
作者:0x264 问题 线上长时间存在一个跟异步 inflate 相关的量级较大的内存泄漏,如下所示: 第一次分析 从内存泄漏粗略看有几个信息: 被泄漏的Activity有很多,所以可能跟某个具体业务的关系不大引用链特别短…...

基于WebSocket实现的后台服务
基于WebSocket实现的后台服务,用于接收客户端的心跳消息,并根据心跳消息来维护客户端连接。 具体实现中,服务启动后会创建一个HttpListener对象,用于监听客户端的WebSocket连接请求。当客户端连接成功后,服务会为每个…...

从硅片到电路:图解CMOS反相器的制造工艺与工作原理
从硅片到电路:图解CMOS反相器的制造工艺与工作原理 在半导体工业中,CMOS反相器作为数字电路的基本构建模块,其制造工艺凝聚了现代微电子技术的精华。本文将带您深入半导体fab的微观世界,通过工艺截面图的逐步解析,揭示…...

热点 | Harness 架构深度解析:AI智能体编排框架的核心原理
热点 | Harness 架构深度解析:AI智能体编排框架的核心原理 声明: 📝 作者:甜城瑞庄的核桃(ZMJ) 原创学习笔记,欢迎分享,但请保留作者信息及原文链接哦~ 本文深度解析 Claude Code 背后的核心架构 Harness,揭示为何"Harness 比模型更重要"成为 2026 年 AI …...
--------协议解析与实战应用)
Emmc系列(二)--------协议解析与实战应用
1. Emmc协议基础解析 Emmc协议作为嵌入式存储领域的核心标准,其重要性不言而喻。简单来说,它就像存储设备与主机之间的"普通话",规定了双方如何高效沟通。我在实际项目中遇到过不少因为协议理解不到位导致的通信故障,今…...

快速搭建stm32f103c8t6引脚验证原型:快马平台一键生成初始化代码
最近在做一个基于STM32的小项目时,发现每次新建工程都要重复配置引脚功能,特别浪费时间。后来发现用InsCode(快马)平台可以快速生成初始化代码,简直打开了新世界的大门。今天就来分享下如何用这个平台快速搭建STM32F103C8T6的引脚验证原型。 …...

DDS信号发生器设计避坑指南:基于FPGA的AD9767驱动常见问题与优化技巧
FPGA驱动AD9767实战避坑手册:从时序优化到DDS精度提升的进阶技巧 当你在深夜调试FPGA与AD9767的接口时,示波器上那些不规则的毛刺和频率偏差是否曾让你抓狂?作为一款经典的高速14位DAC芯片,AD9767在信号发生、通信系统等领域应用广…...

GyverDS18库:工业级DS18B20单总线温度驱动设计与实践
1. GyverDS18库深度解析:面向工业级应用的DS18B20全功能驱动设计Dallas DS18B20是业界最成熟的单总线数字温度传感器之一,凭借其独特的1-Wire协议、无需外部ADC、支持多点组网及寄生供电能力,在工业监控、环境监测、智能家电等领域广泛应用。…...

从一篇TIE论文的稳定性分析入手,手把手复现Bode图判据的MATLAB实现
从TIE论文案例到MATLAB实践:Bode图判据的稳定性分析全解析 在电力电子系统设计中,LCL型并网逆变器的稳定性分析一直是工程师面临的挑战。2015年发表在IEEE Transactions on Industrial Electronics上的那篇经典论文,为我们提供了一个绝佳的研…...

国产半导体测试设备公司领军者,杭州加速科技引领产业自主可控新征程
在半导体产业国产化全面推进的背景下,国产半导体测试设备公司成为突破产业链瓶颈、保障中国芯安全的核心力量。半导体测试设备作为芯片制造关键装备,长期依赖进口,制约国内半导体产业发展。经过多年技术攻坚,一批优质国产半导体测…...

当openclaw遇见ai:借助快马平台打造能理解内容的智能抓取命令
最近在开发一个叫openclaw的网页抓取工具时,发现单纯抓取网页内容已经不能满足需求了。很多时候我们需要对抓取的内容进行二次处理,比如自动摘要、分类、去噪等。这时候就想到了借助AI来增强工具的能力,正好发现了InsCode(快马)平台这个好帮手…...

Retinaface+CurricularFace模型在智能门禁系统中的实战应用
RetinafaceCurricularFace模型在智能门禁系统中的实战应用 1. 引言 想象一下这样的场景:每天早晨上班高峰期,办公楼入口排着长队等待刷卡进门;访客需要在前台登记身份证,保安还要手动核对信息。这种传统门禁方式不仅效率低下&am…...