Allegro无法打开10度走线命令的原因和解决办法
Allegro无法打开10度走线命令的原因和解决办法
做PCB设计的时候,10度走线也是较为常见的设计方式,Allegro支持10度走线,如下图
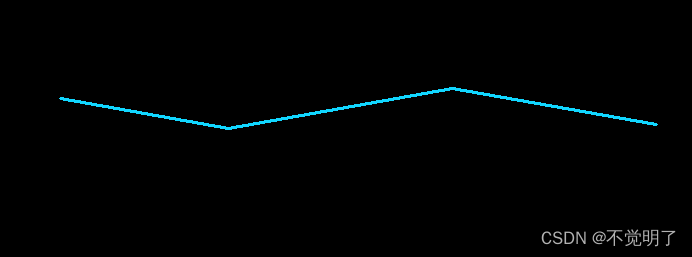
需要10度走线的时候,Options只需要勾选Route offset命令即可
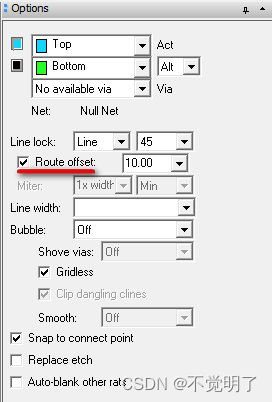
但有时options处会看不到10度走线的命令,如下图
相关文章:
Allegro无法打开10度走线命令的原因和解决办法
Allegro无法打开10度走线命令的原因和解决办法 做PCB设计的时候,10度走线也是较为常见的设计方式,Allegro支持10度走线,如下图 需要10度走线的时候,Options只需要勾选Route offset命令即可 但有时options处会看不到10度走线的命令,如下图...
Frequency Domain Model Augmentation for Adversarial Attack
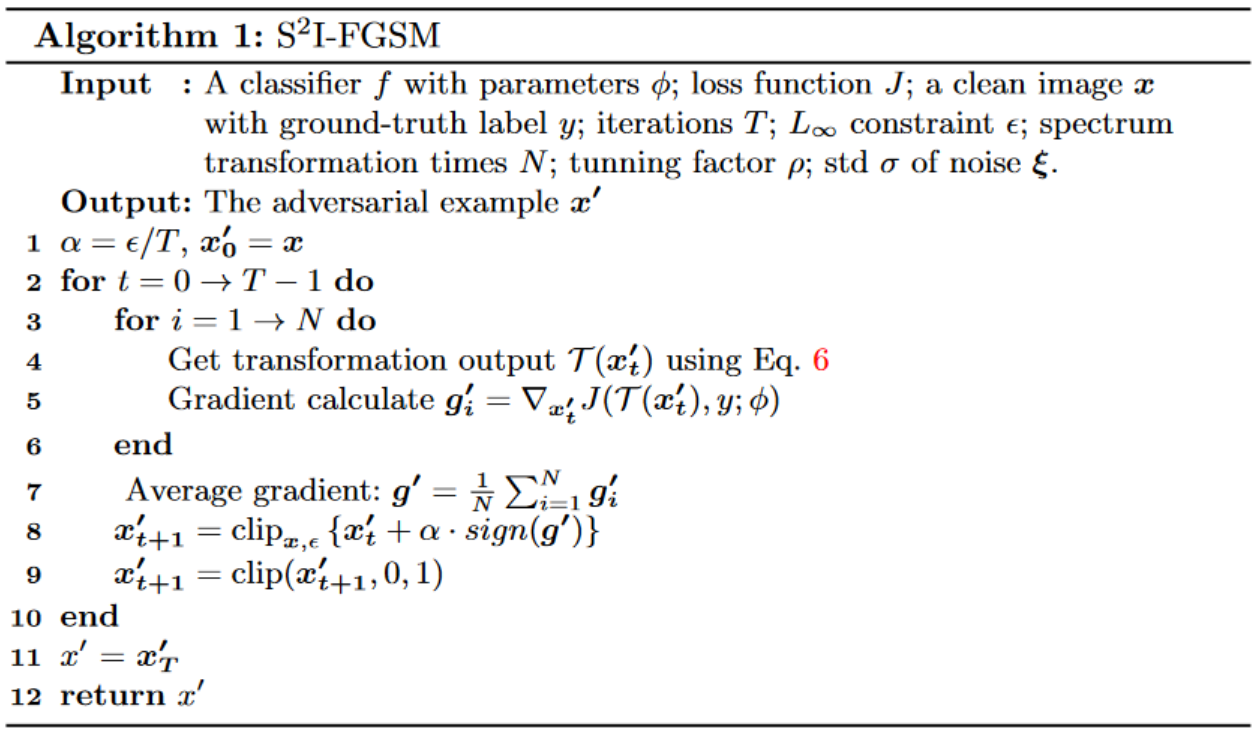
原文:[2207.05382] Frequency Domain Model Augmentation for Adversarial Attack (arxiv.org)代码:https://github.com/yuyang-long/SSA.黑盒攻击替代模型与受攻击模型之间的差距通常较大,表现为攻击性能脆弱。基于同时攻击不同模型可以提高…...
react源码中的协调与调度
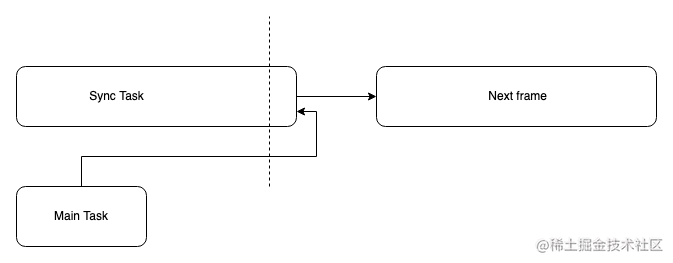
requestEventTime 其实在React执行过程中,会有数不清的任务要去执行,但是他们会有一个优先级的判定,假如两个事件的优先级一样,那么React是怎么去判定他们两谁先执行呢? // packages/react-reconciler/src/ReactFibe…...
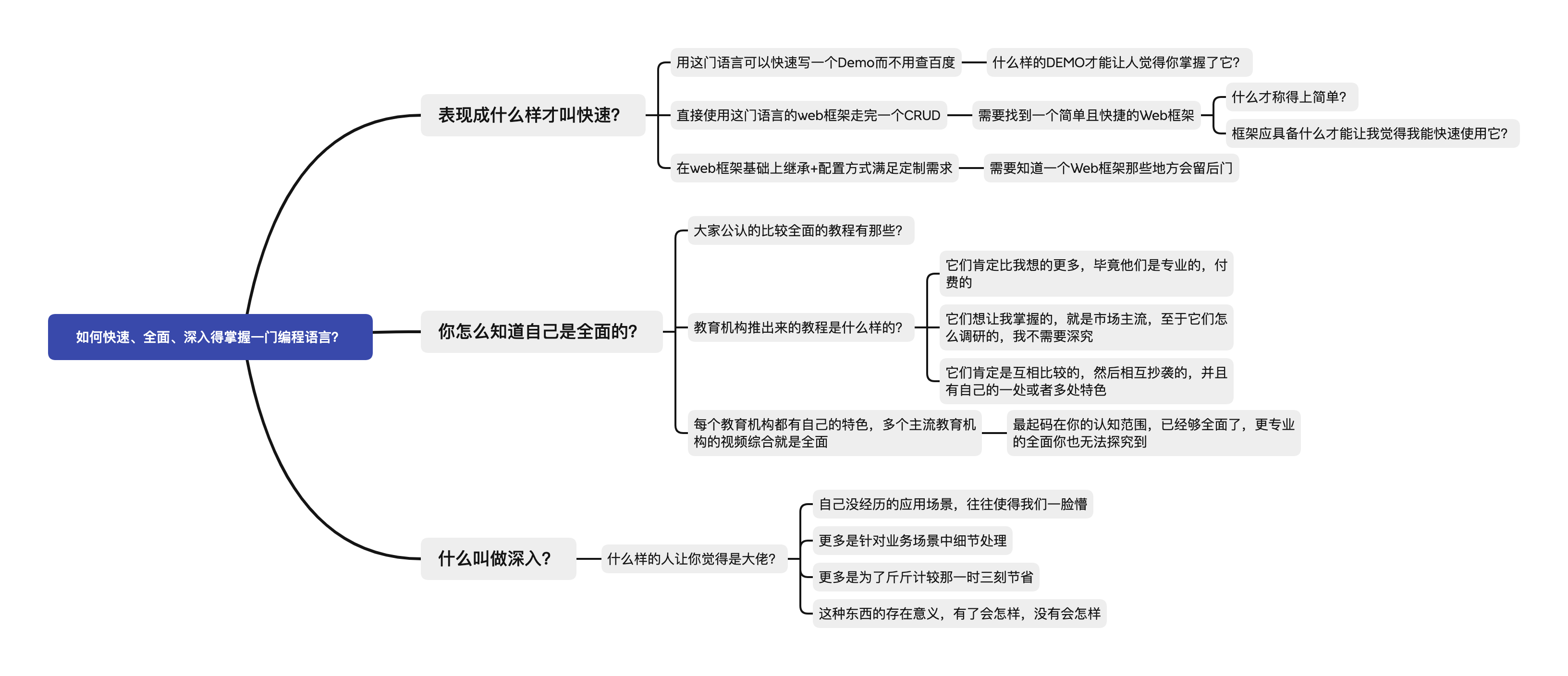
如何快速、全面、深入地掌握一门编程语言
思考路线 如何快速? 什么样的Demo才能让人觉得你掌握了它? 空 判断:构造一个可以判断所有空的 is_empty 函数 for 循环:i 和 集合迭代两种 时间获取:年/月/日 时分秒 时间戳与时间格式互转 休眠时间函数 字符串处理…...
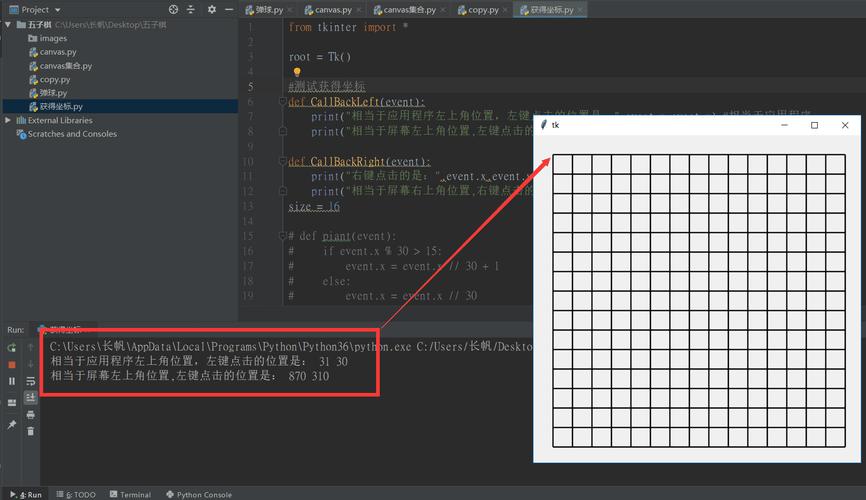
python五子棋代码最简单的,python五子棋代码画棋盘
大家好,本文将围绕python五子棋代码输赢逻辑判断展开说明,如何用python制作五子棋游戏是一个很多人都想弄明白的事情,想搞清楚python五子棋代码最简单的需要先了解以下几个事情。 1、求解用python 编写五子棋怎样编写判断输赢的函数ÿ…...
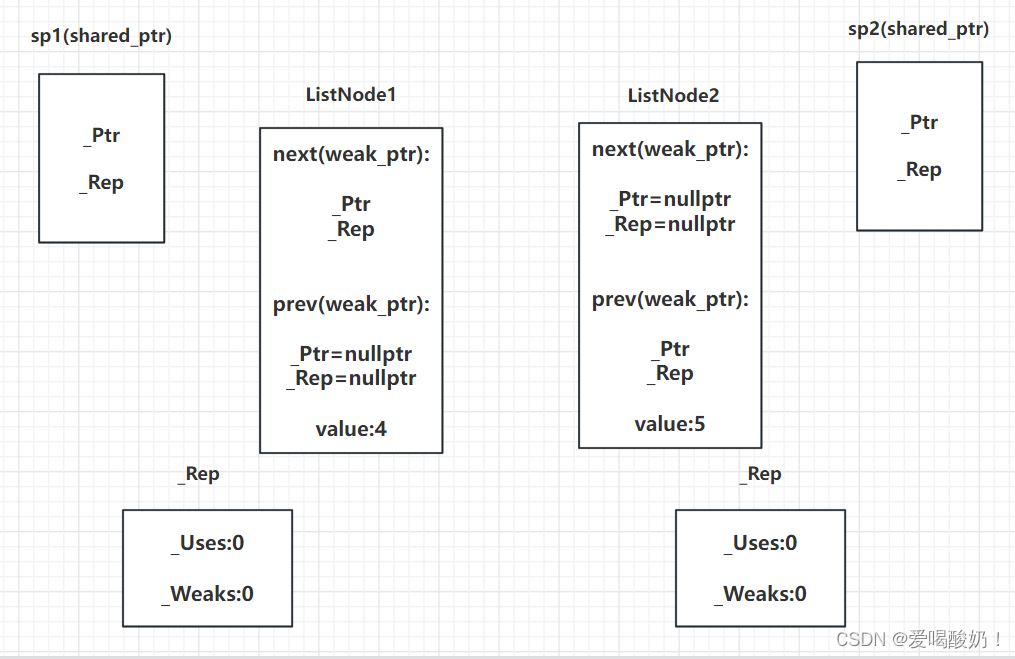
C++ 智能指针的原理:auto_ptr、unique_ptr、shared_ptr、weak_ptr
目录一、理解智能指针1.普通指针的使用二、智能指针1.auto_ptr2.unique_ptr3.shared_ptr(1)了解shared_ptr(2)shared_ptr的缺陷4.weak_ptr本文代码在win10的vs2019中通过编译。 一、理解智能指针 1.普通指针的使用 如果程序需要…...

二叉树前中后层次遍历,递归实现
文章目录前序遍历代码\Python代码\C中序遍历代码\Python代码\C后序遍历代码\Python代码\C层序遍历代码\Python代码\C反向层序遍历代码\Python代码\C总结前序遍历 题目链接 前序遍历意思就是按照“根节点-左子树-右子树”的顺序来遍历二叉树,通过递归方法来实现…...
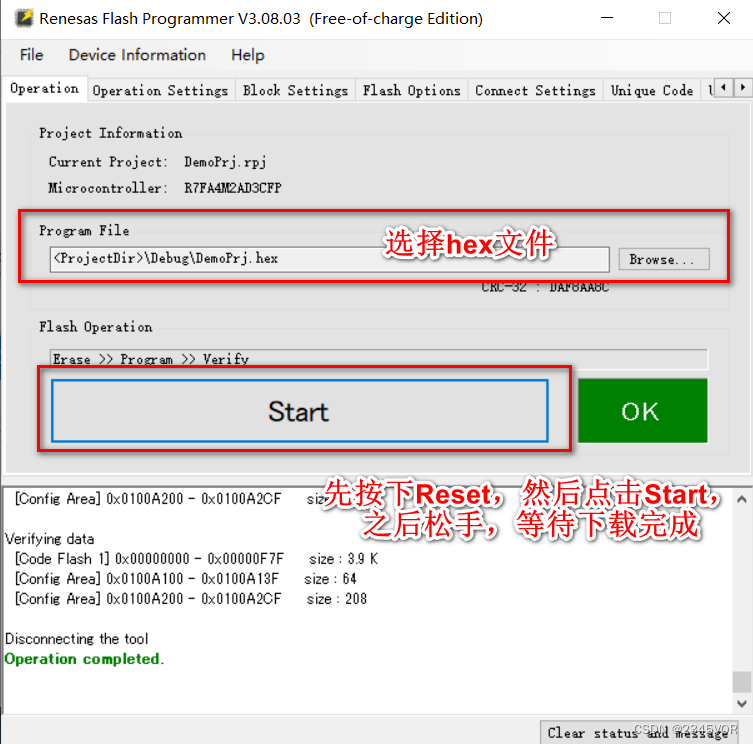
【RA4M2系列开发板GPIO体验2按键控制LED】
【RA4M2系列开发板GPIO体验2按键控制LED】1. 前言2. 配置工程2.1 新建FSP项目2.2 硬件连接以及FSP配置2.2.1 硬件连接2.2.2 FSP配置3. 软件实现3.1 实现的功能3.2 FreeRTOS使用3.2.1 Stack分配函数3.2.2 LED任务3.2.3 Key任务3.3 程序设计3.3.1 设置输出hex文件3.3.2 编译3.3.3…...
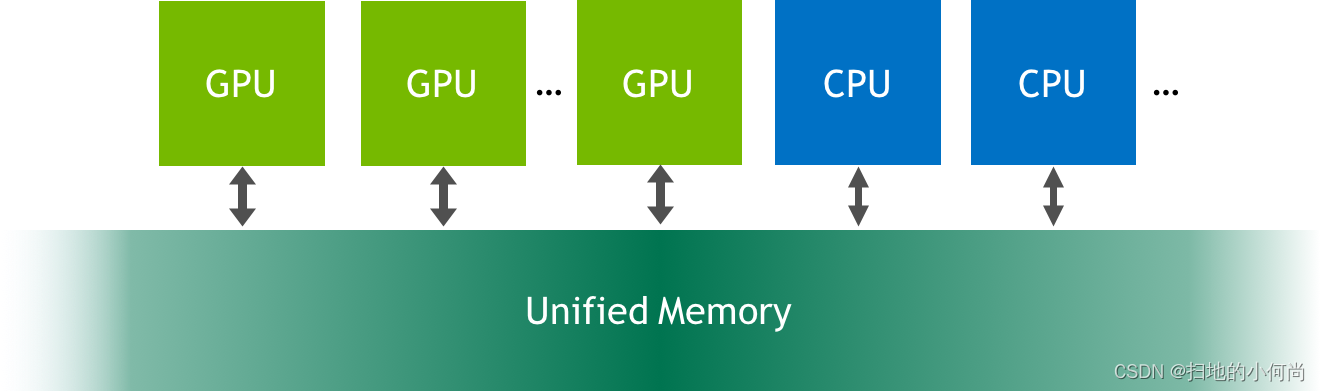
初步介绍CUDA中的统一内存
初步介绍CUDA中的统一内存 更多精彩内容: https://www.nvidia.cn/gtc-global/?ncidref-dev-876561 文章目录初步介绍CUDA中的统一内存为此,我向您介绍了统一内存,它可以非常轻松地分配和访问可由系统中任何处理器、CPU 或 GPU 上运行的代码使用的数据。…...
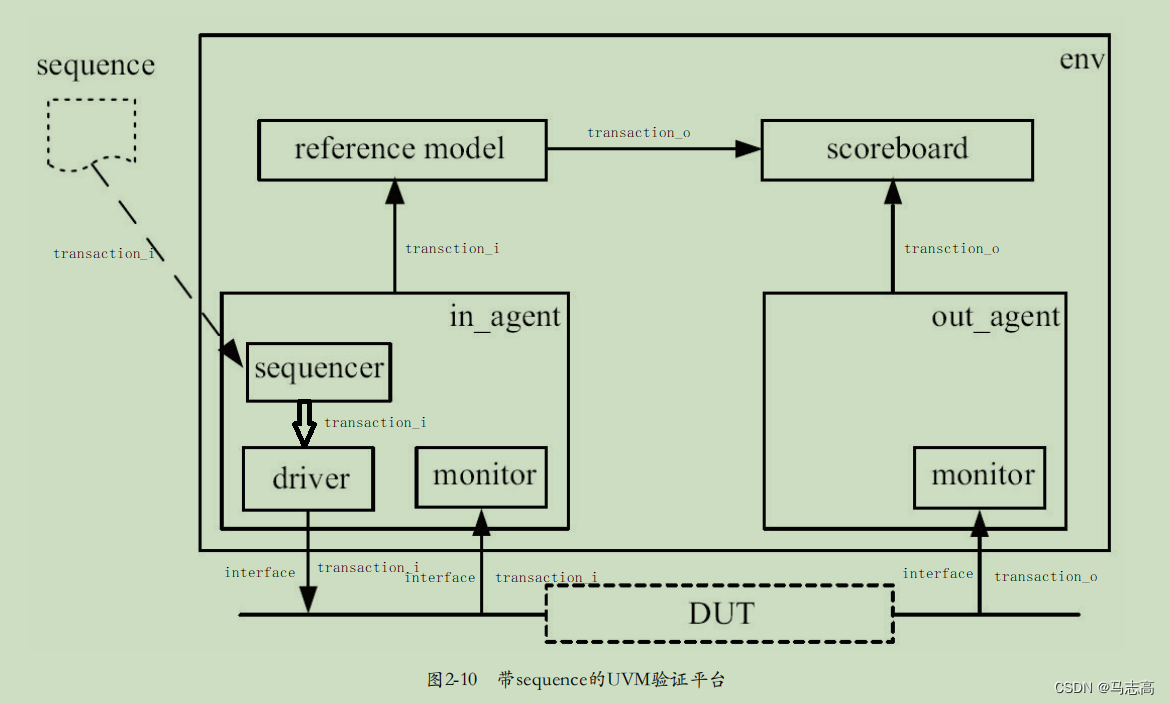
UVM实战--加法器
前言 这里以UVM实战(张强)第二章为基础修改原有的DUT,将DUT修改为加法器,从而修改代码以使得更加深入的了解各个组件的类型和使用。 一. 组件的基本框架 和第二章的平台的主要区别点 (1)有两个transactio…...

Linux系统点亮LED
目录应用层操控硬件的两种方式sysfs 文件系统sysfs 与/sys总结标准接口与非标准接口LED 硬件控制方式编写LED 应用程序在开发板上测试对于一款学习型开发板来说,永远都绕不开LED 这个小小的设备,基本上每块板子都至少会有一颗 LED 小灯,对于我…...
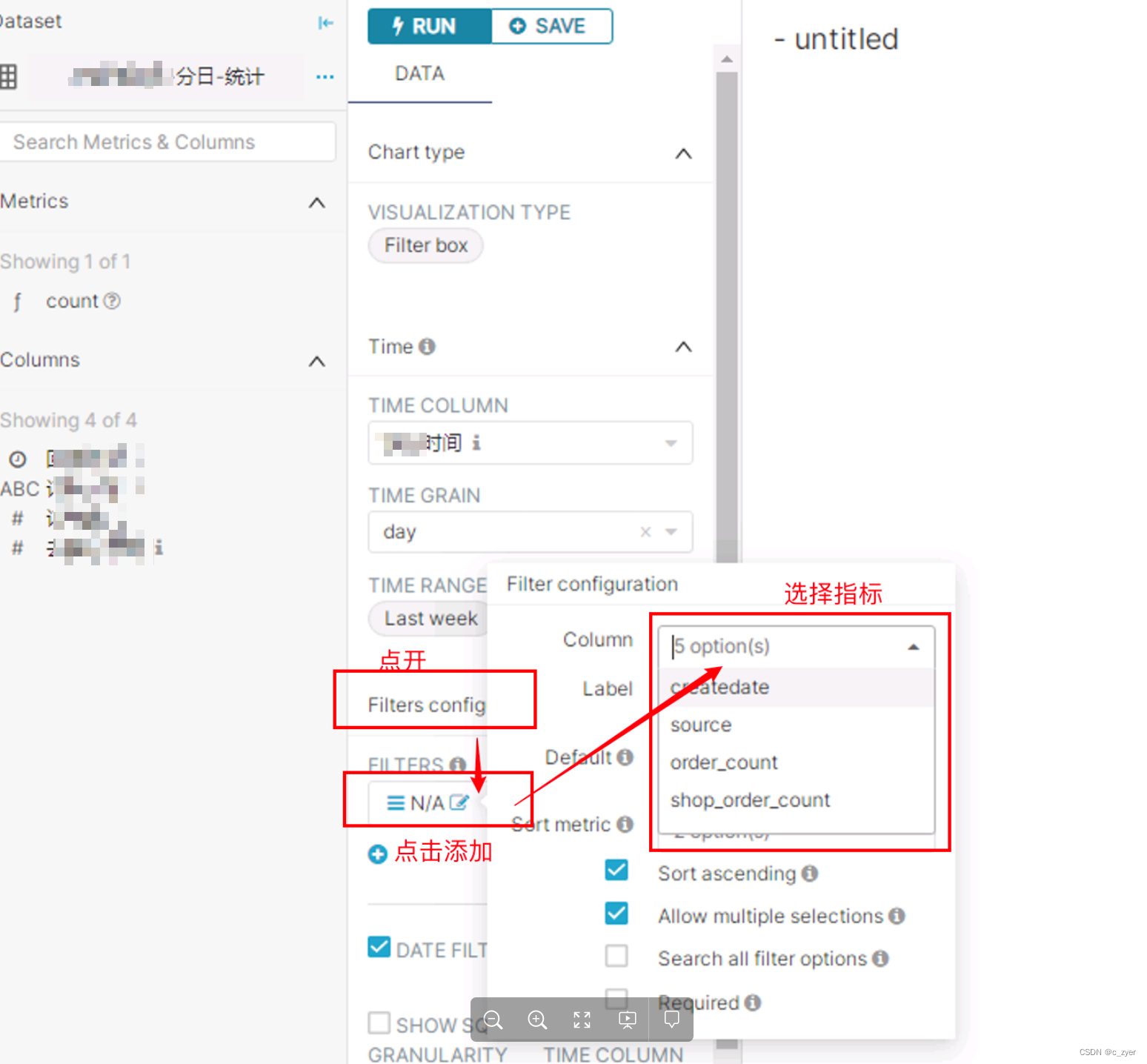
在superset中快速制作报表或仪表盘
在中小型企业,当下需要快速迭代、快速了解运营效果的业务,急需一款开源、好用、能快速迭代生产的报表系统。 老板很关心,BI工程师很关心,同时系统开发人员也同样关心,一个好的技术选型往往能够帮助公司减少很多成本&a…...
【可视化实战】Python 绘制出来的数据大屏真的太惊艳了
今天我们在进行一个Python数据可视化的实战练习,用到的模块叫做Panel,我们通过调用此模块来绘制动态可交互的图表以及数据大屏的制作。 而本地需要用到的数据集,可在kaggle上面获取 https://www.kaggle.com/datasets/rtatman/188-million-us…...
Obsidium一键编码作业,Obsidia惊人属性
Obsidium一键编码作业,Obsidia惊人属性 每个区域都包含几个可定制的功能,允许用户确定如何完全执行应用程序的安全性。Obsidia的功能区允许用户存储任何调整或一键编码作业。 Obsidia惊人属性: 代码虚拟化:代码虚拟化允许您转换程序代码的特定…...
约束优化:约束优化的三种序列无约束优化方法
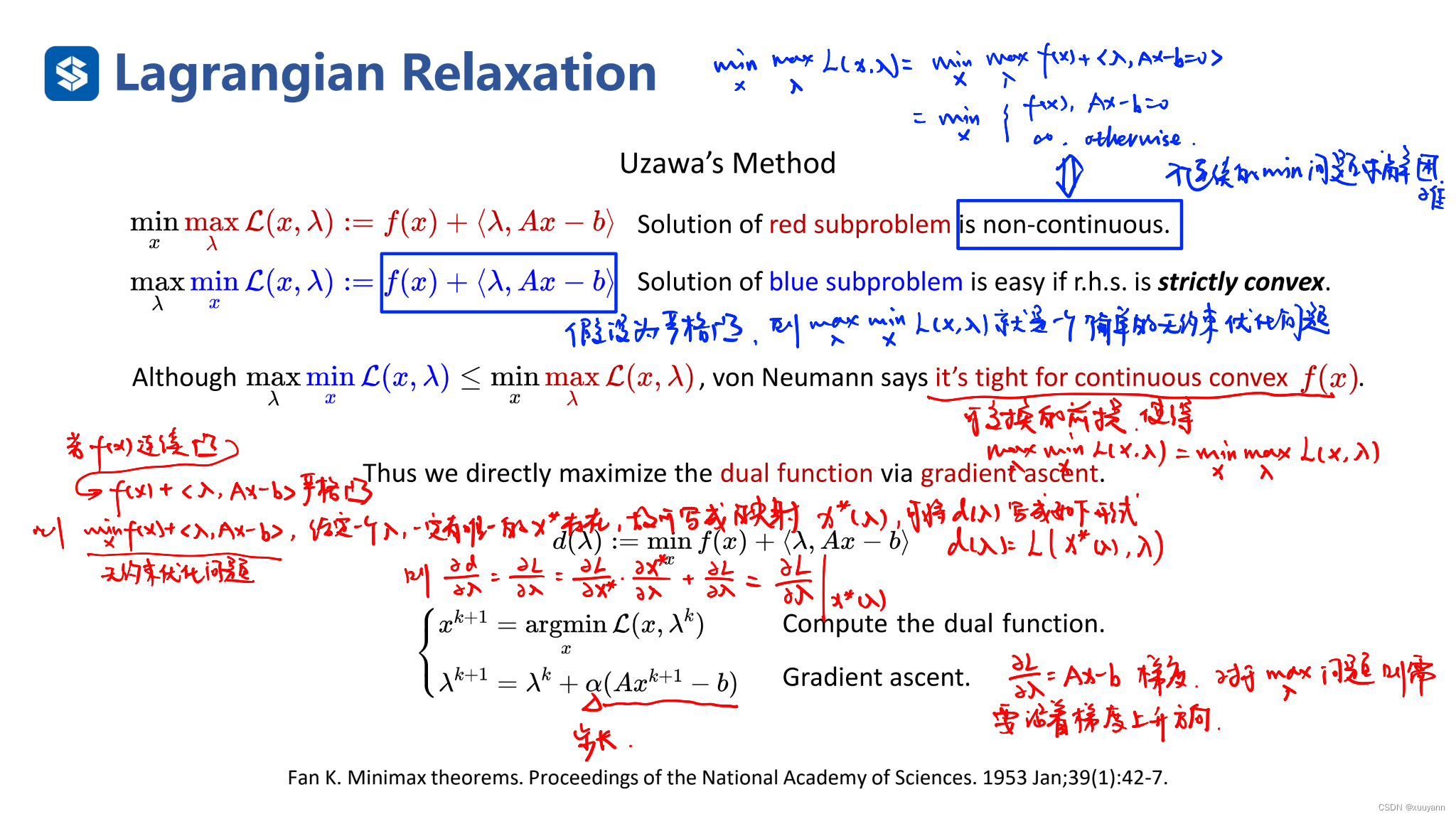
文章目录约束优化:约束优化的三种序列无约束优化方法外点罚函数法L2-罚函数法:非精确算法对于等式约束对于不等式约束L1-罚函数法:精确算法内点罚函数法:障碍函数法等式约束优化问题的拉格朗日函数法:Uzawas Method fo…...
RocketMQ快速入门:消息发送、延迟消息、消费重试
一起学编程,让生活更随和! 如果你觉得是个同道中人,欢迎关注博主gzh:【随和的皮蛋桑】。 专注于Java基础、进阶、面试以及计算机基础知识分享🐳。偶尔认知思考、日常水文🐌。 目录1、RocketMQ消息结构1.1…...
FANUC机器人通过KAREL程序实现与PLC位置坐标通信的具体方法示例
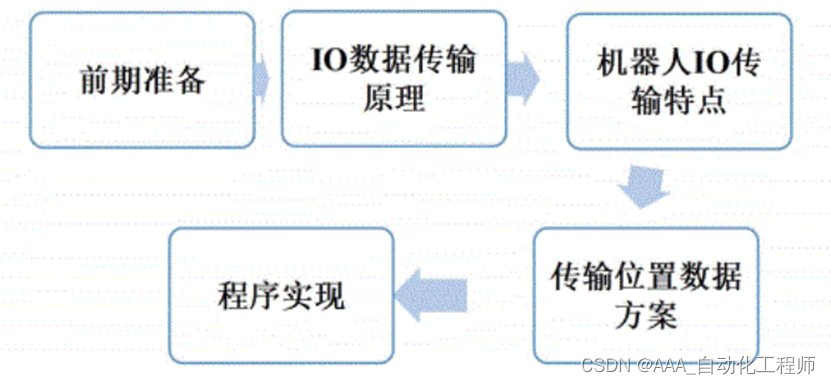
FANUC机器人通过KAREL程序实现与PLC位置坐标通信的具体方法示例 在通信IO点位数量足够的情况下,可以使用机器人的IO点传输位置数据,这里以传输机器人的实时位置为例进行说明。 基本流程如下图所示: 基本步骤可参考如下: 首先确认机器人控制柜已经安装了总线通信软件(例如…...

[蓝桥杯 2015 省 B] 移动距离
蓝桥杯 2015 年省赛 B 组 H 题题目描述X 星球居民小区的楼房全是一样的,并且按矩阵样式排列。其楼房的编号为 1,2,3,⋯ 。当排满一行时,从下一行相邻的楼往反方向排号。比如:当小区排号宽度为 6 时,开始情形如下:我们的…...
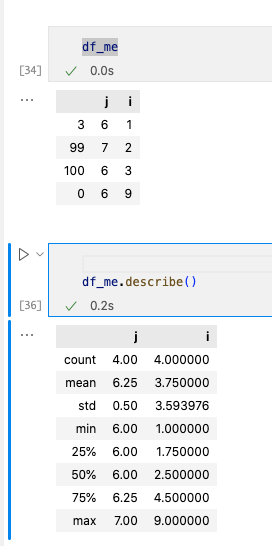
Pandas库入门仅需10分钟
数据处理的时候经常性需要整理出表格,在这里介绍pandas常见使用,目录如下: 数据结构导入导出文件对数据进行操作 – 增加数据(创建数据) – 删除数据 – 改动数据 – 查找数据 – 常用操作(转置࿰…...

python的socket通信中,如何设置可以让两台主机通过外网访问?
要让两台主机通过外网进行Socket通信,需要在网络设置和代码实现两个方面进行相应的配置。下面是具体的步骤: 确认网络环境:首先要确保两台主机都能够通过外网访问。可以通过ping命令或者telnet命令来测试两台主机之间是否可以互相访问。 确定…...

Qwen3.5-4B-Claude-Opus中小企业落地:低成本代码助手私有化部署
Qwen3.5-4B-Claude-Opus中小企业落地:低成本代码助手私有化部署 1. 模型概述 Qwen3.5-4B-Claude-4.6-Opus-Reasoning-Distilled-GGUF是一个专为中小企业设计的轻量级AI推理模型。这个基于Qwen3.5-4B的推理蒸馏版本,特别强化了结构化分析、分步骤回答以…...

智慧树自动化学习助手:技术实现与最佳实践指南
智慧树自动化学习助手:技术实现与最佳实践指南 【免费下载链接】zhihuishu 智慧树刷课插件,自动播放下一集、1.5倍速度、无声 项目地址: https://gitcode.com/gh_mirrors/zh/zhihuishu 智慧树在线学习平台作为国内主流的教育资源平台,…...
)
Python对象生命周期管理失效了?——从引用计数到分代GC的隐性成本陷阱(附内存热力图诊断工具)
第一章:Python对象生命周期管理失效的典型现象与诊断范式Python 的自动内存管理依赖引用计数、循环垃圾收集器(GC)与弱引用机制协同工作,但当这些机制被意外绕过或干扰时,对象生命周期便可能失控。典型失效现象包括&am…...

如何第一次面试就拿下offer【7天速成版】
找实习流程:筛选意向公司(半天)后续可以每天抽半小时看职位有没有更新或下架去面向招聘要求写简历(一天)–简历怎么写?去把技术的中文文档看烂,整理学习博客发布(一到两天)约面&…...

QQ音乐加密文件解码终极指南:三分钟快速上手qmcdump工具教程
QQ音乐加密文件解码终极指南:三分钟快速上手qmcdump工具教程 【免费下载链接】qmcdump 一个简单的QQ音乐解码(qmcflac/qmc0/qmc3 转 flac/mp3),仅为个人学习参考用。 项目地址: https://gitcode.com/gh_mirrors/qm/qmcdump …...

DCM模式反激电源各参数逻辑关系
在DCM模式下,变压器本质上是一个“能量存储-释放”的中间体,初级存储的能量必须在每个周期完全释放给次级。1. 变压器初级电感量(Lp)与最大占空比(Dmax)逻辑关系: 在输入电压(Vin&…...

VideoAgentTrek-ScreenFilter开发环境配置:从零开始搭建Java调用示例
VideoAgentTrek-ScreenFilter开发环境配置:从零开始搭建Java调用示例 如果你是一名Java开发者,最近听说了VideoAgentTrek-ScreenFilter这个视频处理服务,想在自己的项目里试试看,但不知道从哪儿下手,那这篇文章就是为…...

如何高效实现金融核心系统客户证件影像预览?kkFileView完整解决方案
如何高效实现金融核心系统客户证件影像预览?kkFileView完整解决方案 【免费下载链接】kkFileView Universal File Online Preview Project based on Spring-Boot 项目地址: https://gitcode.com/GitHub_Trending/kk/kkFileView 在金融行业日常运营中…...

智能型碧蓝航线自动化助手:AzurLaneAutoScript全方位游戏管理方案
智能型碧蓝航线自动化助手:AzurLaneAutoScript全方位游戏管理方案 【免费下载链接】AzurLaneAutoScript Azur Lane bot (CN/EN/JP/TW) 碧蓝航线脚本 | 无缝委托科研,全自动大世界 项目地址: https://gitcode.com/gh_mirrors/az/AzurLaneAutoScript …...

如何快速掌握英雄联盟个性化展示工具:5个专业技巧与完整指南
如何快速掌握英雄联盟个性化展示工具:5个专业技巧与完整指南 【免费下载链接】LeaguePrank 项目地址: https://gitcode.com/gh_mirrors/le/LeaguePrank 想要为你的英雄联盟客户端打造独一无二的个性化展示效果吗?LeaguePrank是一款基于LCU API开…...