ur3+robotiq ft sensor+robotiq 2f 140配置gazebo仿真环境
ur3+robotiq ft sensor+robotiq 2f 140配置gazebo仿真环境
搭建环境:
ubuntu: 20.04
ros: Nonetic
sensor: robotiq_ft300
gripper: robotiq_2f_140_gripper
UR: UR3
通过上一篇博客配置好ur3、力传感器和robotiq夹爪的rviz仿真环境后,现在来配置一下对应的gazebo的仿真环境
当我们启用机械臂的gazebo仿真环境时,我们使用的是下面的命令
# 启动gazebo仿真环境
roslaunch ur_gazebo ur3_bringup.launch
# 如果gazebo报错,可能是之前的没有完全关闭,需要执行killall gzserver
那么我们就从ur_gazebo中的ur3_bringup.launch文件入手,查找在哪放力传感器和夹爪的urdf配置文件
首先,从universal_robot/ur_gazebo/launch/ur3_bringup.launch中调用ur3的描述文件(urdf)是从下图中红框中调用,所以继续进入该文件查看

同理,load_ur3.launch.xml文件指向下面红框的文件,继续趴

同理,load_ur.launch.xml文件指向下面红框的文件,继续趴

同理,ur.xacro文件指向下面第一个红框的文件,并在第二个红框中调用的它的宏函数,继续往ur_macro.xacro文件找

可以看到universal_robot/ur_gazebo/urdf/ur_macro.xacro文件调用了universal_robot/ur_description/urdf/inc/ur_macro.xacro中的宏函数来包含ur3的描述文件(urdf),ur_gazebo/urdf/ur_macro.xacro里面加上了gazebo的一些配置,我们就在加载完ur3描述文件后面加上我们的力传感器和夹爪描述文件就可以了
加入的代码和上一篇博客加入的代码一样,如下图所示
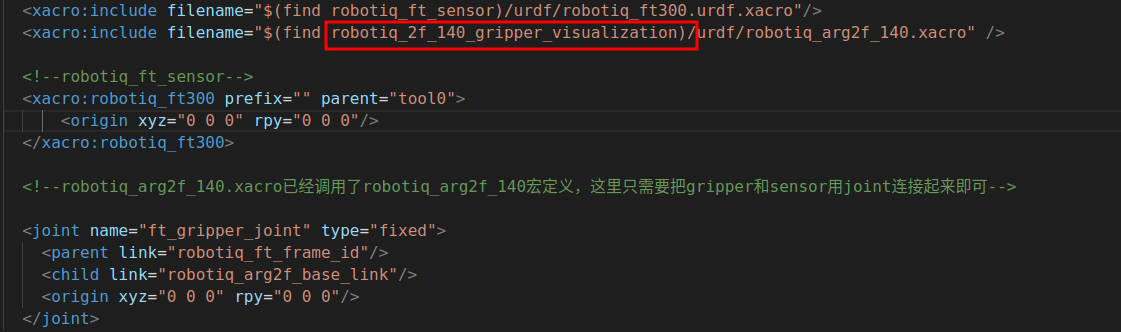
该文件完整代码如下:
<?xml version="1.0"?>
<robot xmlns:xacro="http://wiki.ros.org/xacro"><!-- Definition of the main macro --><xacro:macro name="ur_robot_gazebo" params="prefixjoint_limits_parameters_filekinematics_parameters_filephysical_parameters_filevisual_parameters_filetransmission_hw_interface:=hardware_interface/EffortJointInterfacesafety_limits:=false safety_pos_margin:=0.15 safety_k_position:=20"><xacro:include filename="$(find ur_description)/urdf/inc/ur_macro.xacro"/><!-- Instantiate model for the REAL robot. --><xacro:ur_robotprefix="${prefix}"joint_limits_parameters_file="${joint_limits_parameters_file}"kinematics_parameters_file="${kinematics_parameters_file}"physical_parameters_file="${physical_parameters_file}"visual_parameters_file="${visual_parameters_file}"transmission_hw_interface="${transmission_hw_interface}"safety_limits="${safety_limits}"safety_pos_margin="${safety_pos_margin}"safety_k_position="${safety_k_position}"/><!-- Configure self collision properties per link --><gazebo reference="${prefix}shoulder_link"><selfCollide>true</selfCollide></gazebo><gazebo reference="${prefix}upper_arm_link"><selfCollide>true</selfCollide></gazebo><gazebo reference="${prefix}forearm_link"><selfCollide>true</selfCollide></gazebo><gazebo reference="${prefix}wrist_1_link"><selfCollide>true</selfCollide></gazebo><gazebo reference="${prefix}wrist_3_link"><selfCollide>true</selfCollide></gazebo><gazebo reference="${prefix}wrist_2_link"><selfCollide>true</selfCollide></gazebo><gazebo reference="${prefix}ee_link"><selfCollide>true</selfCollide></gazebo><!--Inject Gazebo ROS Control plugin, which allows us to use ros_controlcontrollers to control the virtual robot hw.--><gazebo><plugin name="ros_control" filename="libgazebo_ros_control.so"><!--robotNamespace>/</robotNamespace--><!--robotSimType>gazebo_ros_control/DefaultRobotHWSim</robotSimType--></plugin></gazebo></xacro:macro><xacro:include filename="$(find robotiq_ft_sensor)/urdf/robotiq_ft300.urdf.xacro"/> <xacro:include filename="$(find robotiq_2f_140_gripper_visualization)/urdf/robotiq_arg2f_140.xacro" /><!--robotiq_ft_sensor--><xacro:robotiq_ft300 prefix="" parent="tool0"><origin xyz="0 0 0" rpy="0 0 0"/></xacro:robotiq_ft300><!--robotiq_arg2f_140.xacro已经调用了robotiq_arg2f_140宏定义,这里只需要把gripper和sensor用joint连接起来即可--><joint name="ft_gripper_joint" type="fixed"><parent link="robotiq_ft_frame_id"/><child link="robotiq_arg2f_base_link"/><origin xyz="0 0 0" rpy="0 0 0"/></joint>
</robot>查看效果:
运行代码,打开gazebo仿真
cd ~/catkin_ws
source devel/setup.bash
roslaunch ur_gazebo ur3_bringup.launch
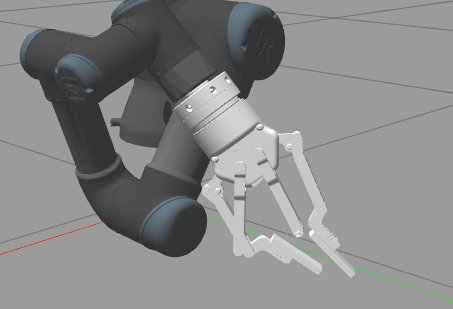
注意:可以看到夹爪和力传感器是安装上去了,但是夹爪看起来要散架了,还会一直抖动,解决办法看我这篇博客
相关文章:
ur3+robotiq ft sensor+robotiq 2f 140配置gazebo仿真环境
ur3robotiq ft sensorrobotiq 2f 140配置gazebo仿真环境 搭建环境: ubuntu: 20.04 ros: Nonetic sensor: robotiq_ft300 gripper: robotiq_2f_140_gripper UR: UR3 通过上一篇博客配置好ur3、力传感器和robotiq夹爪的rviz仿真环境后,现在来配置一下对…...

Vue3后台管理系统(四)SVG图标
目录 一、安装 vite-plugin-svg-icons 二、创建图标文件夹 三、main.ts 引入注册脚本 四、vite.config.ts 插件配置 五、TypeScript支持 六、组件封装 七、使用 Element Plus 图标库往往满足不了实际开发需求,可以引用和使用第三方例如 iconfont 的图标&…...
)
【收集】2023年顶会accepted papers list(NeurIPS/CVPR/ICML/ICLR/ECCV/AAAI/IJCAI/WWW...)
from: https://blog.csdn.net/lijinde07/article/details/128024833 顺便看看 评审意见是怎样的 Accepted papers list(2022.11.24) AAAI 2023 :录取结果已出 **ICLR 2023 ** :https://openreview.net/group?idICLR…...

空闲态LTE到NR重选优先级介绍
SIB24消息包含小区重选时5G邻区信息(NR neighbor cell information for cell reselection)。 终端注册在LTE网络,如果网络不上报SIB24消息,则终端不会重选到5G网络。 针对这种网络不上报SIB24的场景,终端可以做特殊处理,强制执行LTE到5G的重选流程。 终端网络制式设置为不…...
数据结构与算法:Map和Set的使用
1.搜索树 1.定义 二叉搜索树又称二叉排序树,它或者是一棵空树,或者是具有以下性质的二叉树: 若它的左子树不为空,则左子树上所有节点的值都小于根节点的值若它的右子树不为空,则右子树上所有节点的值都大于根节点的值它的左右子…...
C语言——动态内存管理
目录0. 思维导图:1. 为什么存在动态内存分配2. 动态内存函数介绍2.1 malloc和free2.2 calloc2.3 realloc3. 常见的动态内存错误3.1 对NULL指针的解引用操作3.2 对动态内存开辟的空间越界访问3.3 对非动态开辟内存使用free释放3.4 使用free释放一块动态开辟内存的一部…...

Docker安装Grafana
文章目录Grafana介绍拉取镜像准备相关挂载目录及文件启动容器访问测试添加 Prometheus 数据源常见问题看板配置Grafana介绍 上篇博客介绍了prometheus的安装: Docker部署Prometheus 在获取应用或基础设施运行状态、资源使用情况,以及服务运行状态等直观…...
数据结构(四):树、二叉树、二叉搜索树
数据结构(四)一、树1.树结构2.树的常用术语二、二叉树1.什么是二叉树2.二叉树的数据存储(1)使用数组存储(2)使用链表存储三、二叉搜索树1.这是什么东西2.封装二叉搜索树:结构搭建3. insert插入节…...
)
040、动态规划基本技巧(labuladong)
动态规划基本技巧 一、动态规划解题套路框架 基于labuladong的算法网站,动态规划解题套路框架; 1、基本介绍 基本套路框架: 动态规划问题的一般形式是求最值;核心如下: 穷举;明确base case;…...

html笔记(一)
一、html简介 什么是HTML? Hyper Text Markup Language 超文本标记语言 超文本?超级文本,例如流媒体,声音、视频、图片等。 标记语言?这种语言是由大量的标签组成。 任何一个标签都有开始标签和结束标签&…...

索引的情况
select * from A left join B on A.c B.c where A.employee_id 3 1.一句sql中 是可能走多次索引的,具体的 一般 表连接 ,或者说生成临时表的时候,会走索引 然后条件过滤的时候也会走索引,具体的 还是要具体分析 2.表连接 字段…...
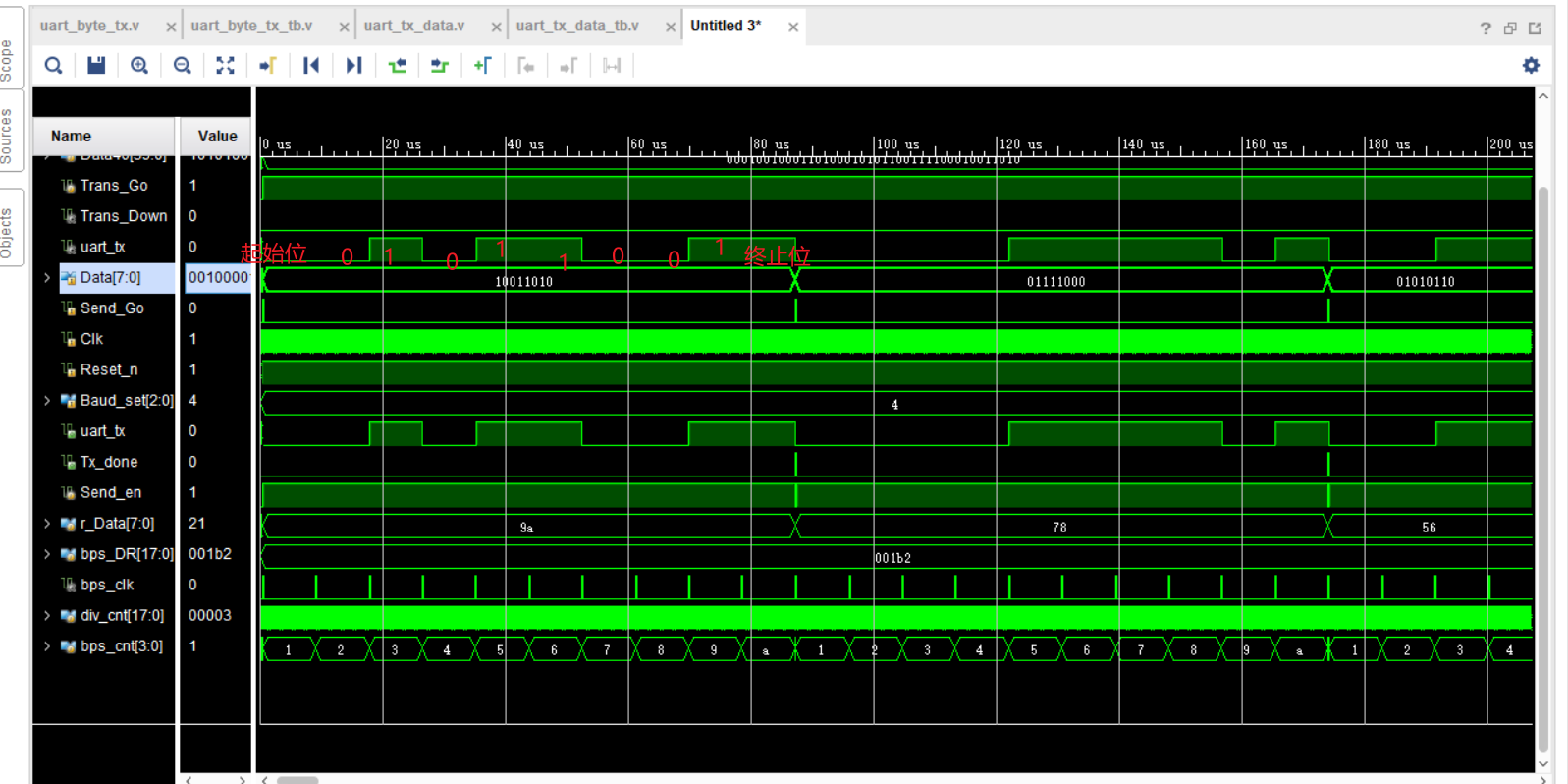
Verilog 学习第五节(串口发送部分)
小梅哥串口部分学习part1 串口通信发送原理串口通信发送的Verilog设计与调试串口发送应用之发送数据串口发送应用之采用状态机实现多字节数据发送串口通信发送原理 1:串口通信模块设计的目的是用来发送数据的,因此需要有一个数据输入端口 2:…...
破解遗留系统快速重构的5步心法(附实例)
前两天和一个架构师朋友闲聊,说到了 「重构」 这个话题,他们公司早年间上线的项目系统,因一直没专人在演进过程中为代码质量负责,导致现在代码越来越混乱,逐渐堆积成“屎山”,目前的维护成本已远高于重新开…...
信号量(上)实验
实验1:解决订票终端的临界区管理 订票终端是解决冲突问题,所以信号量的值是1 #include <stdio.h> #include <pthread.h> #include <unistd.h> #include <semaphore.h> int ticketAmout 2; // 票的数量: 全局变量 sem_t mutex…...

阿里5年,一个女工对软件测试的理解
成为一个优秀的测试工程师需要具备哪些知识和经验? 针对这个问题,可以直接拆分以下三个小问题来详细说明: 1、优秀软件测试工程师的标准是什么? 2、一个合格的测试工程师需要具备哪些专业知识? 3、一个合格的测试工程…...

前端练习项目
30 Web Projects 30 多个带有 HTML、CSS 和 JavaScript 的 Web 项目,由 Packt Publishing 提供 https://github.com/PacktPublishing/30-Web-Projects-with-HTML-CSS-and-JavaScript Small projects https://github.com/WebDevVikramChoudhary/small_projects_for_…...

sql复习(set运算符、高级子查询)
一、set运算符 union:得到两个查询结果的并集,并且⾃动去掉重复⾏。不会排序 union all:得到两个查询结果的并集,不会去掉重复⾏。也不会排序 intersect:得到两个查询结果的交集,并且按照结果集的第⼀个列进…...

整车电源的几种模式:OFF/ACC/RUN/CRANK
本文框架1.前言2. 四种电源模式2.1 OFF模式2.2 ACC模式2.3 ON模式2.4 CRANK模式3. KL15/KL301.前言 在诊断或者网络管理相关模块开发对客户的需求进行梳理时,经常会看到客户对不同车辆模式下处理策略的需求,如果前期没接触过这几种模式,可能…...

踩了大坑:wordpress后台 无法将上传的文件移动至wp-content
一、问题描述 今天迁移了wordpress站点至新服务器,结果上传图片出现“无法将上传的文件移动至wp-content/uploads”的提示,这是怎么回事,为什么会这样。 报错如下: 2023/02/20 08:57:48 [error] 9861#9861: *79624 FastCGI sen…...

page cache设计及实现
你好,我是安然无虞。 page cache的设计及实现 page cache 本质上也是一个哈希桶, 它是按照页的数量进行映射的. 当 central cache 向 page cache 申请内存时, page cache 先检查对应位置是否有span, 如果没有则向更大页去寻找一个span, 如果找到则分裂成两个. 比如…...

物理引导的机器学习工作流:气候建模的融合创新与实践
1. 项目概述:当气候建模遇见机器学习如果你像我一样,在气候模拟这个领域摸爬滚打超过十年,就会深刻体会到一种“甜蜜的负担”:我们构建的地球系统模型(ESM)越来越精细,物理过程越来越复杂&#…...

如何删除论文脚注横线的方法——视图-草稿-引用——显示备注——删除脚注分隔符-即可。
如何删除论文脚注横线的方法——视图-草稿-引用——显示备注——删除脚注分隔符-即可。 Word中脚注线不会删?这里有妙招!,教育,职业教育,好看视频...

Vue3 图片标框功能实现方案
基于 Vue3 组合式 API 的图片标框(画框、标注、选框)完整实现,核心逻辑封装在 GetBoxes 组件里,复制就能用 一、功能说明 ✅ 在图片上鼠标拖拽画矩形框 ✅ 实时显示框坐标(x, y, width, height) ✅ 支持多…...

Taotoken平台快速获取APIKey并开始你的第一个Python调用示例
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken平台快速获取APIKey并开始你的第一个Python调用示例 1. 准备工作:注册与登录 要开始使用Taotoken,…...

PCL 法向量夹角剔除错误匹配点对【2026最新版】
目录 一、 算法简介 1、主要函数 2、参考文献 二、 代码实现 三、 结果展示 四、 参考链接 博客长期更新,本文最新更新时间为:2026年5月24日。代码在PCL1.15.1中测试通过 一、 算法简介 在三维点云配准中,对应点(correspondence)的准确性直接决定了配准算法的精度和鲁棒性…...

DeepSeek重复代码识别失效了?5个被90%团队忽略的AST解析盲区及修复清单
更多请点击: https://codechina.net 第一章:DeepSeek代码重复检测失效的真相与影响 DeepSeek-R1 模型在代码理解任务中表现出色,但其内置的代码重复检测机制在特定场景下存在系统性失效。根本原因在于模型对语义等价但语法结构差异显著的代…...

告别坐标点击!用Poco精准定位UI控件,让你的Airtest安卓自动化脚本更稳定
告别坐标点击!用Poco精准定位UI控件,让你的Airtest安卓自动化脚本更稳定每次UI微调就导致脚本大面积失效?分辨率变化让精心编写的自动化测试瞬间崩溃?作为从坐标点击转型到控件识别的实践者,我深刻理解这种挫败感。三年…...

猫抓浏览器扩展终极指南:5分钟掌握全网视频资源下载技巧
猫抓浏览器扩展终极指南:5分钟掌握全网视频资源下载技巧 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 你是否经常遇到心仪的视频无法…...

3分钟快速解决Windows热键冲突检测难题:Hotkey Detective终极指南
3分钟快速解决Windows热键冲突检测难题:Hotkey Detective终极指南 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective …...

终极艾尔登法环存档迁移指南:3分钟学会角色无损转移
终极艾尔登法环存档迁移指南:3分钟学会角色无损转移 【免费下载链接】EldenRingSaveCopier 项目地址: https://gitcode.com/gh_mirrors/el/EldenRingSaveCopier 还在为《艾尔登法环》存档迁移而烦恼吗?当游戏版本更新后,你辛辛苦苦培…...