CCC数字钥匙设计【BLE】 --建立安全测距
1、建立安全测距Establish Secure Ranging
车端总共有三种建立安全测距的方式,具体如下:
1) Optimal Flow
2) Sub-Optimal Flow
3) Ranging Recovery Flow
为了确定建立安全测距需要执行哪条流程,车辆需要进行以下流程选择。当车辆和设备使用相同的URSK交换UWB安全测距消息时,测距session被视为一个Active Ranging Session。具体流程如下图所示。

如果车辆需要对手机进行定位,则车辆应首先检查应启动哪个流程以建立安全测距。为此,车辆应首先检查它是否已经有一个active ranging session。如果是,车辆将使用该session来定位手机。
如果没有active ranging session,则车辆将检查是否存在激活的URSK。如果是,则车辆应遵循ranging recovery flow恢复与该活动URSK关联的测距session(使用其UWB_Session_Id)。
如果没有激活的URSK,车辆将检查是否存在pre-derived URSK。如果有,则车辆将遵循optimal flow建立安全测距。
如果没有激活的URSK或pre-derived URSK,车辆将退回到sub-optimal flow。
如果有一个激活的测距session,如果车辆的URSK TTL即将到期,或者车辆决定使用一个TTL更短的URSK来启动发动机(参见第19.5.6.1节),车辆可以用一个pre-derived URSK建立一个新的Secure ranging session。
当pre-derived URSK激活时,车辆和手机应丢弃先前激活的URSK(如果有的话)。
2、Optimal Flow,即Secure Ranging Setup
如果车辆具有可用的pre-derived URSK,则应由车辆执行Optimal flow。Optimal flow只需简单地遵循Secure Ranging Setup flow,使用pre-derived URSK。如下图:

如果车辆使用此流程激活pre-derived URSK,则车辆和手机应在新URSK被激活之前丢弃当前激活的URSK(如果有的话)以获得相关的数字钥匙。
为了建立安全测距,每条消息都应使用消息类型:UWB Ranging Service message,如下表。

3、Sub-Optimal Flow
如果车辆没有可用的pre-derived URSK,则执行Sub-Optimal流程。Sub-Optimal流程是URSK生成流程和Secure Ranging Setup流程的结合,如下图。

此外,如果手机在执行Optimal流程时,激活URSK失败并且无其他可用的Pre-derived URSK,或者当车辆URSK与手机URSK不同步时,车辆应退回到Sub-Optimal流程。
一旦通过使用Optimal流程或Sub-Optimal流程建立了安全测距,车辆就可以定位手机。一旦定位到手机,则车辆可以执行PE进入功能。
4、Ranging Recovery Flow
一旦建立了测距session,只要它的URSK TTL没有过期或STS_Index没有达到最大限制,它就可以在很长一段时间内处于激活状态。但是,如图19-25所示,车辆或手机可能会将Active Ranging Session置于暂停状态,以进行功率优化。
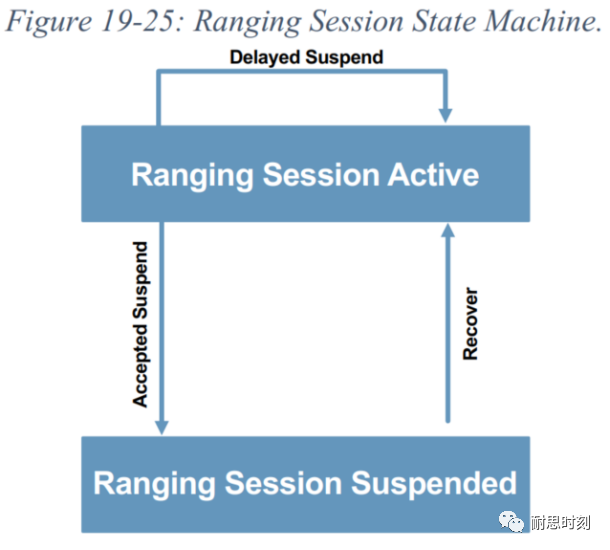
何时发送Ranging Suspend Request,取决于发送方/请求方。但是,接收方可以选择在有限的时间内延迟Ranging Suspend Request。
例如,如果手机在很长一段时间内没有检测到任何运动,则手机可以请求将测距session置于暂停状态。另一方面,如果车辆强烈认为,目前仍然需要测距,或将在不久的将来需要测距,则可能会响应延迟Ranging Suspend Request的请求。
下图是手机请求执行Ranging Suspend Request,车端接收该请求的流程【Ranging_Suspend_RS(0x00)】。

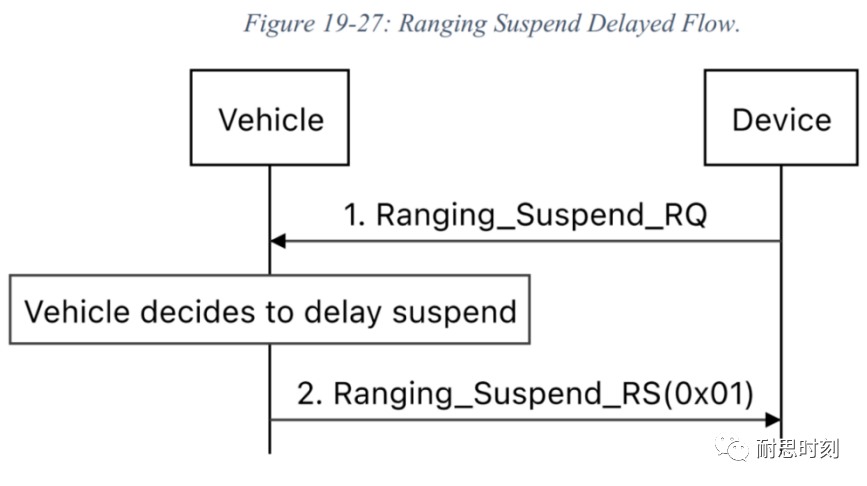
下图是手机请求执行Ranging Suspend Request,但返回延时的流程【Ranging_Suspend_RS(0x01)】。
当处于测距暂停模式时,车辆可以向手机发送测距恢复请求消息(见19.3.1.9节)。手机可以通过向车辆发送Device Ranging Intent SubEvent来触发测距恢复。
Ranging Recovery flow提供了一个低延迟的安全测距(最小的交换),且无新的URSK。
但是,在启动Ranging Recovery 流程之前,车辆必须满足以下要求:
1、 是否有一个激活的URSK (TTL未过期)与车辆打算恢复的暂停测距会话相关联。
2、 打算恢复的暂停测距会话不需要改变测距配置,如改变频率、锚点编号等。
如果车辆需要安全测距,车辆将检查连接的手机是否存在暂停的测距会话,并判断是否同时满足上述两个要求。
如果是,车辆将启动Ranging Recovery流程。当手机接收到测距恢复请求时,它应该识别出提供的UWB_Session_Id的同一组配置,用于建立测距会话。
然后手机将选择并发送一个新的UWB_Time0和STS_Index0。测距恢复流程如下图所示:

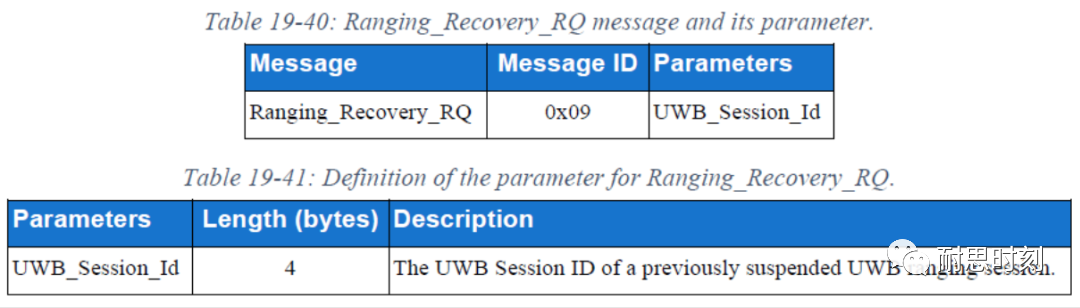
上图步骤1:Ranging_Recovery_RQ由车端发出,其报文定义及相关参数定义如下:
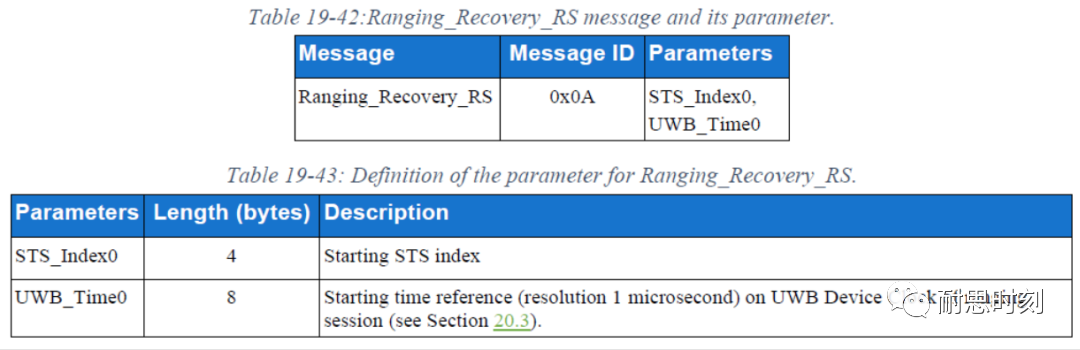
上图步骤2:Ranging_Recovery_RS由手机端发出,其报文定义及相关参数定义如下:
上图步骤D框,车辆选择之前协商的UWB配置参数,用于恢复测距会话的UWB_Session_Id。
5、低功耗模式处理
当车辆处于低功耗状态时,在建立BLE连接后可能无法开始测距。在这种情况下,车辆可能会发送vehicle state SubEvent notification,表明其“低功耗模式”。收到此通知后,手机应负责使用Ranging Intent SubEvent来启动测距。该手机可能会立即发送Ranging Intent,或者在检测到车辆接近时,稍后以更高的置信度发送Ranging Intent。
6、总结
车端总共有三种建立安全测距的方式,具体如下:
1) Optimal Flow
2) Sub-Optimal Flow
3) Ranging Recovery Flow
1、Optimal Flow,即Secure Ranging Setup流程。发生在测距未建立前,但无激活的URSK,且已有pre-derived URSK。
2、Sub-Optimal Flow,即URSK生成流程+Secure Ranging Setup流程。发生在测距未建立前,但无激活的URSK,且无pre-derived URSK。
3、Ranging Recovery Flow,发生在测距已暂停, 且有激活的URSK,及不需要改变测距配置。
4、当车辆处于低功耗模式时,可能无法测距,此时车端可能会发送vehicle state SubEvent notification,表明处于低功耗模式;手机接收到后,再发送Ranging Intent SubEvent来启动测距。
相关文章:
CCC数字钥匙设计【BLE】 --建立安全测距
1、建立安全测距Establish Secure Ranging 车端总共有三种建立安全测距的方式,具体如下: 1) Optimal Flow 2) Sub-Optimal Flow 3) Ranging Recovery Flow 为了确定建立安全测距需要执行哪条流程,车辆需要进行以下流程选择。当车辆和设备…...

Ubuntu22.04 Opencv4.5.1 CPU和GPU编译攻略,Opencv CPU和GPU编译保姆教程 亲自测试。
1、安装opencv依赖 安装时最好更换一下源。 sudo apt-get -y update sudo apt-get -y install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev sudo apt-get -y install libgtk-3-dev gfortran openexr libatlas-base-dev python3-dev pyt…...
常识判断 --- 党史
目录 中共1~3大 例题 国民党 例题 中共4~5大 例题 中共起义~会议 例题 中共六届六中全会(1938年9月) 中共七大(1945年4月) 例题 中共七届二中全会 例题 中共8~10大 中共11~12届全会 例题 中共13~14大 …...

Rust 基础再理解
Rust堆栈 Rust中各种类型的值默认都存储在栈中,除非显式地使用Box::new()将它们存放在堆上,但数据要存放在栈中,要求其数据类型的大小已知。对于静态大小的类型,可直接存储在栈上,如裸指针、布尔、字符、整数浮点数&a…...
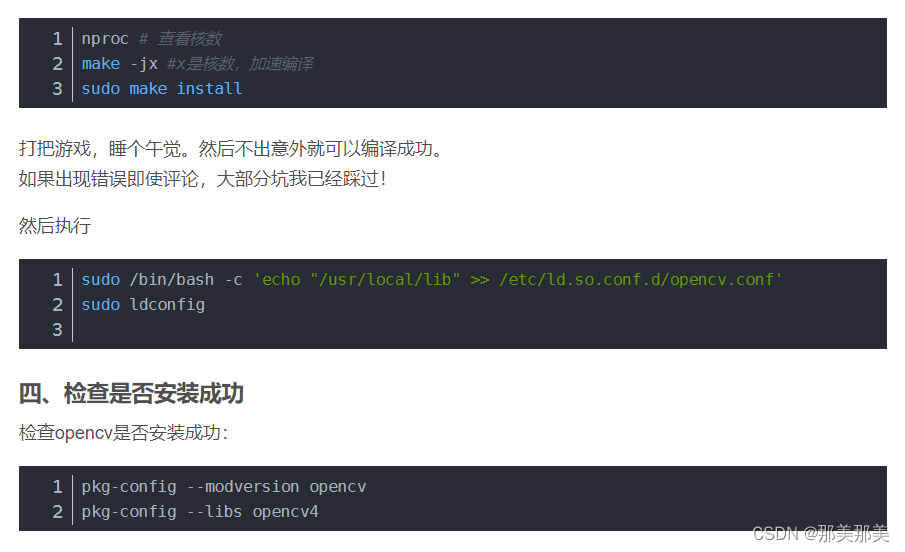
Opencv cuda版本在ubuntu22.04中安装办法,解决Could NOT find CUDNN的办法
文章目录 概要下载cuda的runfile版本配置环境变量官网下载cudann安装Opencv依赖包下载opencv和opencv_contrib并解压准备编译安装anaconda环境执行编译命令安装OpenCV并检查是否安装成功 概要 解决以下安装问题: -- Could NOT find CUDNN: Found unsuitable versi…...

全网首发YOLOv8暴力涨点:Gold-YOLO,遥遥领先,超越所有YOLO | 华为诺亚NeurIPS23
💡💡💡本文独家改进:提出了全新的信息聚集-分发(Gather-and-Distribute Mechanism)GD机制,Gold-YOLO,替换yolov8 head部分 实现暴力涨点 Gold-YOLO | 亲测在多个数据集能够实现大幅涨点 💡💡💡Yolov8魔术师,独家首发创新(原创),适用于Yolov5、Yolov7、…...

BD就业复习第四天
1. 布隆过滤器怎么实现去重 布隆过滤器是一种用于快速检查一个元素是否可能存在于一个大集合中的数据结构,但它并不适用于精确去重。因为布隆过滤器具有一定的误判率(可能会将不存在的元素误判为存在),所以不能确保完全的去重。但…...
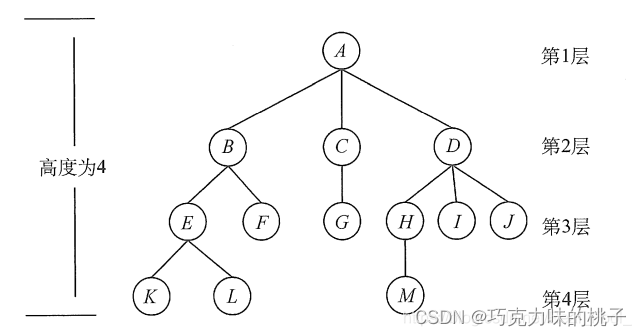
数据结构 | 树
树 树是n(n>0)个结点的有限集。当n 0时,称为空树。在任意一棵非空树中应满足: 有且仅有一个特定的称为根的结点。当n>1时,其余节点可分为m(m>0)个互不相交的有限集T1,T2,…,Tm&#…...
Android11 适配
一、修改targetSdkVersion为30 将build.gradle的目标版本targetSdkVersion修改为30(Android 11) targetSdkVersion 30Android11的改变改变主要影响以Adnroid11 为目标版本的应用(targetSdkVersion>30才有影响),和所…...
UML基础与应用之对象图
什么是对象图? 对象图表示一组对象及它们之间的关系,是某一时刻系统详细信息的快照,描述系统交互的静态图形,它由协作的对象组成,但不包含在对象之间传递的任何消息。因为对象是类的实例化,所以说某一时刻…...

英码科技精彩亮相火爆的IOTE 2023,多面赋能AIoT产业发展!
9月20日至22日,在这金秋飒爽的季节,为期三天的IOTE 2023第二十届国际物联网展深圳站在深圳国际会展中心盛大举行。英码科技精彩亮相本届展会,并在同期举办的AIoT视觉物联产业生态大会发表了主题演讲,与生态伙伴们共同探讨AIoT产业…...
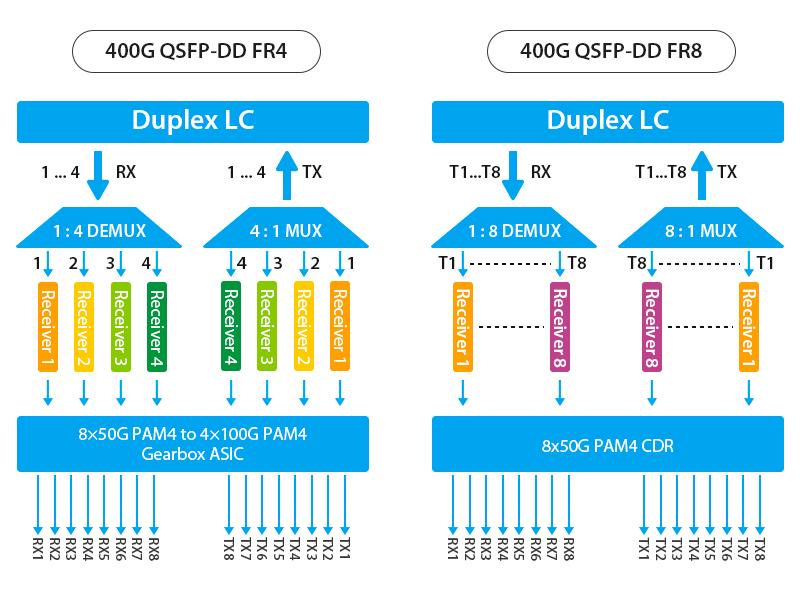
400G QSFP-DD FR4 与 400G QSFP-DD FR8光模块:哪个更适合您的网络需求?
QSFP-DD 光模块随着光通信市场规模的不断增长已成为400G市场中客户需求量最高的产品。其中400G QSFP-DD FR4和400G QSFP-DD FR8光模块都是针对波分中距离传输(2km)的解决方案,它们之间有什么不同?应该如何选择应用?飞速…...
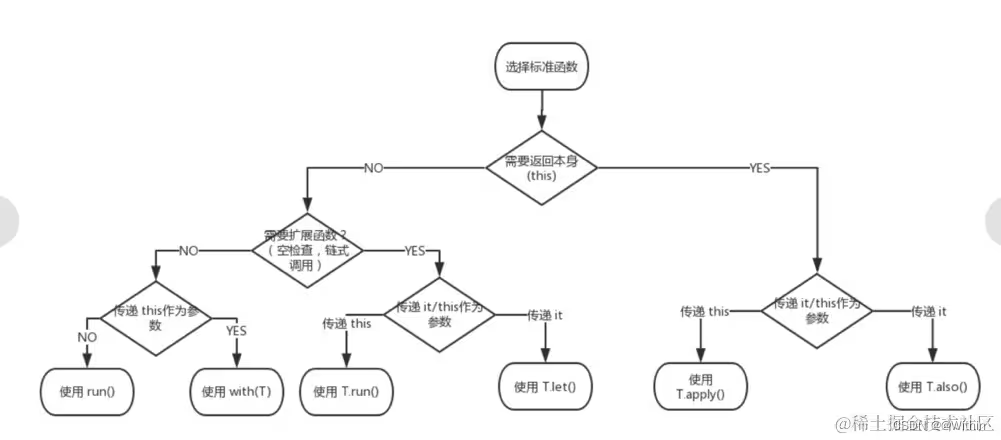
【Android】Kotlin 中的 apply、let、with、also、run 到底有啥区别?
一、图示 二、apply apply 函数接收一个对象并返回该对象本身。它允许您在对象上执行一些操作,同时仍然返回原始对象。 这个函数的语法为: fun <T> T.apply(block: T.() -> Unit): T 其中,T 是对象的类型,block 是一…...

设计模式——职责链模式
职责链模式 职责链模式职责链模式解决什么问题?职责链模式实现 职责链模式 使多个对象都有机会处理请求,从而避免请求的发送者和接收者之间的耦合关系。将这个对象练成一条链,并沿着这条链传递该请求,知道有一个对象处理它为止 …...

小程序自定义tabbar,中间凸起
微信小程序自带tabbar,但无法实现中间按钮凸起样式和功能,因此按照设计重新自定义一个tabbar 1、创建tabbar文件,与pages同级创建一个文件夹,custom-tab-bar,里面按照设计图将底部tabbar样式编写 <view class"tab-bar&q…...

数据结构-顺序栈C++示例
栈(stack)是限定仅在表尾进行插入或删除操作的线性表。 对栈来说,表尾端称为栈顶(top), 表头端称为栈底(bottom),不含元素的空表称为空栈。 假设栈 S ( a 1 , a 2 , a 3 , ⋯ , a n ) S(a_1,a_2,a_3,\cdots,a_n) S(a1,a2,a3,⋯,an…...
若依cloud -【 100 ~ 103 】
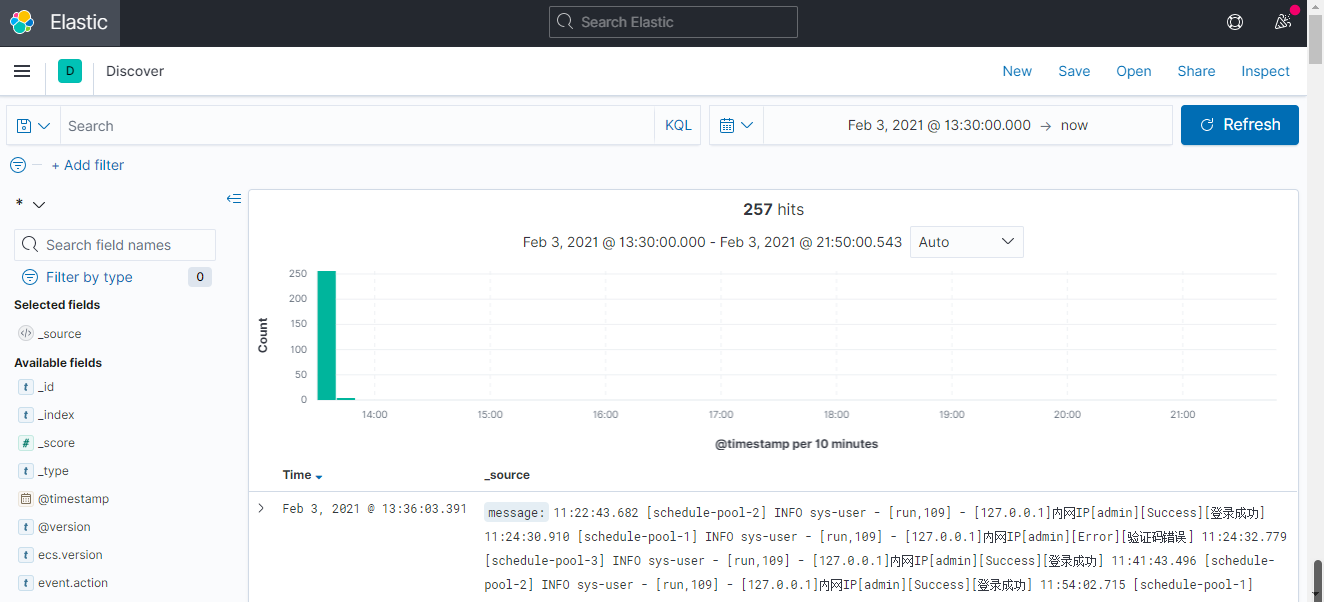
100 分布式日志介绍 | RuoYi 分布式日志就相当于把日志存储在不同的设备上面。比如若依项目中有ruoyi-modules-file、ruoyi-modules-gen、ruoyi-modules-job、ruoyi-modules-system四个应用,每个应用都部署在单独的一台机器里边,应用对应的日志的也单独存…...

可转债实战与案例分析——成功的和失败的可转债投资案例、教训与经验分享
实战与案例分析——投资案例研究 股票量化程序化自动交易接口 一、成功的可转债投资案例 成功的可转债投资案例提供了有价值的经验教训,以下是一个典型的成功案例: 案例:投资者B的成功可转债投资 投资者B是一位懂得风险管理的投资者&#…...

@NotNull注解不生效,全局异常处理
1.引入依赖 <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-validation</artifactId><version>3.1.2</version> </dependency> 2:实体类 实体类属性加上NotNull注解…...
【办公自动化】使用Python一键往Word文档的表格中填写数据(文末送书)
🤵♂️ 个人主页:艾派森的个人主页 ✍🏻作者简介:Python学习者 🐋 希望大家多多支持,我们一起进步!😄 如果文章对你有帮助的话, 欢迎评论 💬点赞Ǵ…...

汽车零部件企业 ERP 推荐清单:聚焦智能制造与供应链协同方案
汽车零部件制造业作为汽车产业的核心支撑,正经历着前所未有的变革压力。新能源汽车渗透率突破50%、主机厂JIT(准时制)交付要求日益严苛、全球化供应链波动加剧,这些趋势共同推动行业进入智能制造与供应链深度协同的新阶段。在此背…...

JetBrains IDE试用期重置插件:简单三步恢复30天完整功能
JetBrains IDE试用期重置插件:简单三步恢复30天完整功能 【免费下载链接】ide-eval-resetter 项目地址: https://gitcode.com/gh_mirrors/id/ide-eval-resetter 还在为JetBrains IDE试用期到期而烦恼吗?ide-eval-resetter插件是你需要的终极解决…...

EasyWatermark代码架构详解:MVVM模式与依赖注入实践
EasyWatermark代码架构详解:MVVM模式与依赖注入实践 【免费下载链接】EasyWatermark 🔒 🖼 Securely, easily add a watermark to your sensitive photos. 安全、简单地为你的敏感照片添加水印,防止被人泄露、利用 项目地址: ht…...

MacOS MySQL安装
1、安装包下载地址 MySQL Community Server:开源版本,适用于个人和小型企业。MySQL Enterprise Edition:商业版本,提供额外的功能和技术支持。MySQL Cluster:分布式数据库系统,适用于高可用性和高并发场景…...

Commit Mono版本管理指南:如何优雅地升级和回滚字体版本
Commit Mono版本管理指南:如何优雅地升级和回滚字体版本 【免费下载链接】commit-mono Commit Mono is an anonymous and neutral programming typeface. 项目地址: https://gitcode.com/gh_mirrors/co/commit-mono Commit Mono是一款匿名且中性的编程字体&a…...

AnyVisLoc:专为低空多视角无人机定位打造的全球首个统一评测基准
一、论文背景与开创性意义 AnyVisLoc 是专为低空多视角条件下的无人机绝对视觉定位(Absolute Visual Localization,简称 AVL)设计的全球首个统一评测基准与大尺度数据集,论文题为 《Exploring the best way for UAV visual local…...

【信号处理】基于高斯函数的Caputo-Fabrizio分数阶导数闭式表达式及其在信号处理中的应用附matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。🍎完整代码获取 定制创新 论文复现点击:Matlab科研工作室👇 关注我领取海量m…...

观察使用Token Plan套餐前后月度AI调用成本的变化趋势
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 观察使用Token Plan套餐前后月度AI调用成本的变化趋势 对于频繁调用大模型API的开发者或团队而言,成本的可预测性与可控…...

【2026 最新】Web 安全完整学习指南 红队全套技能栈
0x00 技能栈 依照红队的流程分工,选择适合自己的技能栈发展。 越接近中心的能力点越贴近web技术栈,反之亦然。可以根据自身情况,选择技术栈的发展方向。 0x01 漏洞理解篇(Vulnerability) 1.1 前端 同源策略 & CSP & JOSNP 跨域…...
)
告别手动评分!用ImageJ的IHC Profiler插件,5分钟搞定免疫组化定量分析(附避坑指南)
告别手动评分!用ImageJ的IHC Profiler插件,5分钟搞定免疫组化定量分析(附避坑指南) 免疫组化(IHC)作为病理诊断和生物医学研究中的金标准技术,其结果的量化分析一直是困扰研究人员的难题。传统人…...