基于单目相机的2D测量(工件尺寸和物体尺寸)
目录
1.简介
2.基于单目相机的2D测量
2.1 想法:
2.2 代码思路
2.2 主函数部分
1.简介
基于单目相机的2D测量技术在许多领域中具有重要的背景和意义。
-
工业制造:在工业制造过程中,精确测量是确保产品质量和一致性的关键。基于单目相机的2D测量技术可以用于检测和测量零件尺寸、位置、形状等参数,进而实现自动化生产和质量控制。通过实时监测并反馈测量结果,可以快速发现和纠正生产中的偏差,提高产品的一致性和合格率。
-
计算机视觉:单目相机作为计算机视觉的传感器之一,能够捕捉并记录场景中的图像信息。基于单目相机的2D测量技术可以通过对图像进行处理和分析来提取目标物体的特征和参数。这种技术在目标检测、物体跟踪、姿态估计等计算机视觉任务中起着至关重要的作用。
-
地理测绘和导航:基于单目相机的2D测量技术可以应用于地理测绘和导航领域。通过获取地面或航空图像,并利用图像处理和计算机视觉算法,可以实现地表特征的提取、地形建模、数字地图的生成等工作。这对于城市规划、农业管理、导航系统等方面具有重要的应用价值。
-
医学影像:在医学领域,基于单目相机的2D测量技术可以用于医学影像的分析和测量。通过对医学图像进行处理和分析,可以提取器官、病灶的形状、大小、位置等信息,辅助医生进行诊断和治疗决策。这种技术在影像学、放射学、眼科等医学专业中得到广泛应用。
综上所述,基于单目相机的2D测量技术在工业制造、计算机视觉、地理测绘和导航、医学影像等领域都有着重要的背景和意义。它可以提高生产效率、产品质量,推动科学研究和医学进步,为各个领域带来更多的机遇和挑战。

2.基于单目相机的2D测量
2.1 想法:
因为是静态测量,所以核心测量算法使用仿射变换。
首先拿到参照物区域,进行真实距离和像素距离的尺寸换算
在参照物区域找到物体轮廓,进行多边形拟合,对拟合到的物体进行测量
2.2 代码思路
代码思路的简要描述:
-
导入所需的库,包括
cv2和自定义的utlis。 -
初始化一些变量,如是否使用网络摄像机 (
webcam)、图像路径 (path)、捕获对象 (cap)、图像缩放比例 (scale)、纸张宽度和高度 (wP和hP) 以及上一帧时间 (pTime)。 -
进入主循环。在每次循环中,如果使用网络摄像机,则读取图像帧;否则,从指定路径读取图像。
-
对图像进行轮廓检测,获取所有检测到的轮廓 (
conts) 和最大轮廓 (biggest)。 -
使用最大轮廓对图像进行透视变换 (
warpImg),得到纸张的鸟瞰图 (imgWarp)。 -
对纸张鸟瞰图进行轮廓检测,获取所有检测到的轮廓 (
conts2)。 -
遍历每个轮廓对象,绘制轮廓线和箭头,并计算测量结果 (纸张宽度
nW和高度nH)。 -
在图像上绘制测量结果和帧率信息。
-
显示原始图像和处理后的图像。
-
等待按键,继续下一次循环。
以上是代码的简要思路,具体实现和功能可以参考代码中的注释。
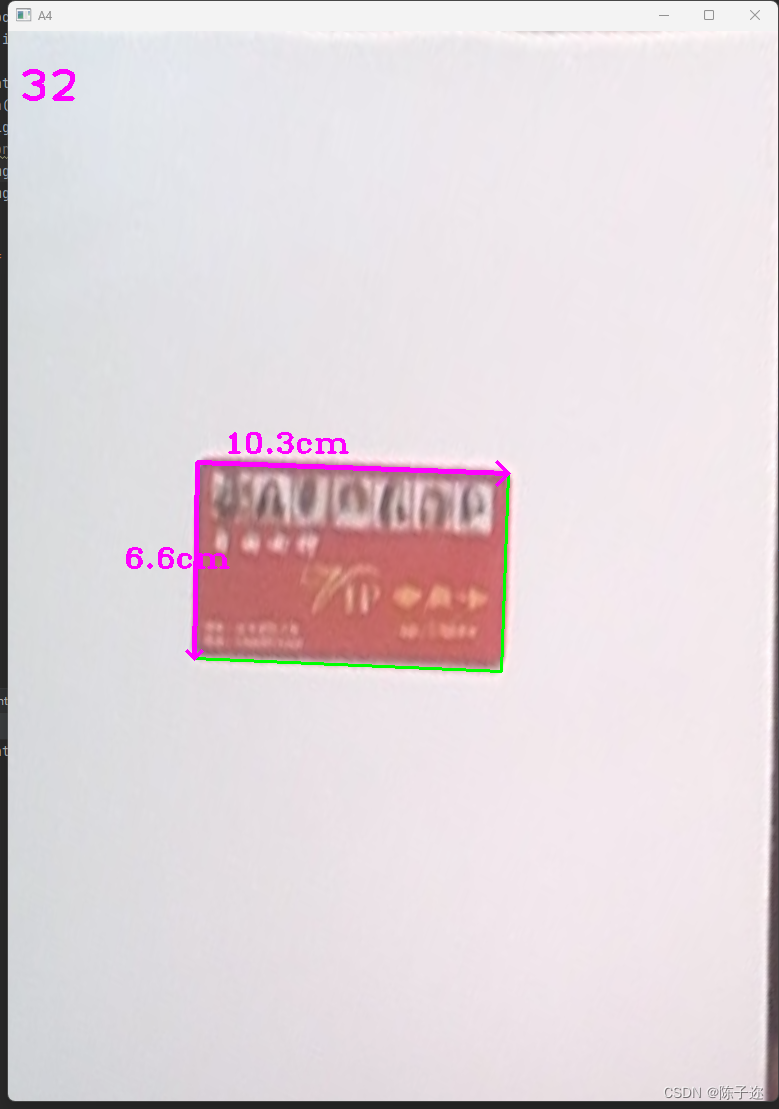
关于复现,你可以准备一张A4纸,一张小卡片,或者边缘信息明显的其他物件,按照图片中方式摆放即可。
像素与真实距离换算为
3像素=1mm
检测帧率可达30帧,误差在2%(误差取决相机分辨率),缺点是无法检测轮廓不清晰的物件以及复杂物体。
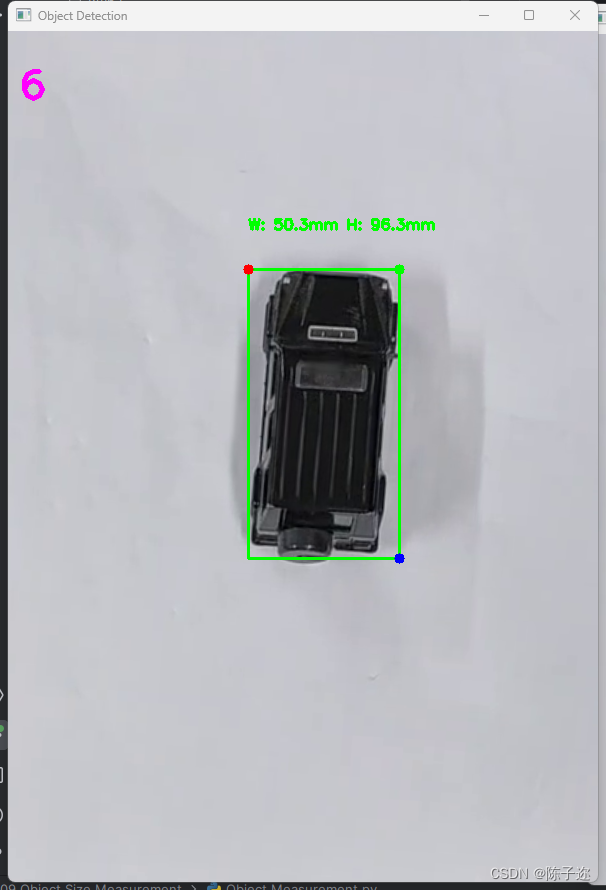
下一篇介绍如何测量复杂形状的物体
2.2 主函数部分
import cv2
import utlis
import time###################################
webcam = True # 网络摄像机一开始为FALSE
path = '1.jpg'
cap = cv2.VideoCapture(0) # 使用捕获和cv定义相机-点点视频捕获,,我们将定义id,因此在这种情况下为0
cap.set(10, 160) # 设置参数,宽度,高度,亮度,为他们中的每一根写入间隙点集,具有不同的亮度id,有十个,所以将其保持为160,然后在宽度和高度上,宽度为3,1920
cap.set(3, 1920)
cap.set(4, 1080)
scale = 3
wP = 270 * scale
hP = 370 * scale
###################################
pTime = 0
while True:if webcam:success, img = cap.read()else:img = cv2.imread(path)imgContours, conts = utlis.getContours(img, minArea=50000, filter=4)if len(conts) != 0:biggest = conts[0][2]# print(biggest)imgWarp = utlis.warpImg(img, biggest, wP, hP)imgContours2, conts2 = utlis.getContours(imgWarp,minArea=2000, filter=4,cThr=[50, 50], draw=False)if len(conts) != 0:for obj in conts2:cv2.polylines(imgContours2, [obj[2]], True, (0, 255, 0), 2)nPoints = utlis.reorder(obj[2])nW = round((utlis.findDis(nPoints[0][0] // scale, nPoints[1][0] // scale) / 10), 1)nH = round((utlis.findDis(nPoints[0][0] // scale, nPoints[2][0] // scale) / 10), 1)cv2.arrowedLine(imgContours2, (nPoints[0][0][0], nPoints[0][0][1]),(nPoints[1][0][0], nPoints[1][0][1]),(255, 0, 255), 3, 8, 0, 0.05)cv2.arrowedLine(imgContours2, (nPoints[0][0][0], nPoints[0][0][1]),(nPoints[2][0][0], nPoints[2][0][1]),(255, 0, 255), 3, 8, 0, 0.05)x, y, w, h = obj[3]cv2.putText(imgContours2, '{}cm'.format(nW), (x + 30, y - 10), cv2.FONT_HERSHEY_COMPLEX_SMALL, 1.5,(255, 0, 255), 2)cv2.putText(imgContours2, '{}cm'.format(nH), (x - 70, y + h // 2), cv2.FONT_HERSHEY_COMPLEX_SMALL, 1.5,(255, 0, 255), 2)cTime = time.time()fps = 1 / (cTime - pTime)pTime = cTimecv2.putText(imgContours2, str(int(fps)), (10, 70), cv2.FONT_HERSHEY_PLAIN, 3,(255, 0, 255), 3)# 图像预处理及边缘检测cv2.imshow('A4', imgContours2)img = cv2.resize(img, (0, 0), None, 0.5, 0.5)cv2.imshow('Original', img)cv2.waitKey(1)utlis模块代码
import cv2
import numpy as np
import math
import time
def getContours(img, cThr=[100, 100], showCanny=False, minArea=5000, filter=0, draw=False):# 将输入图像转换为灰度图像imgGray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 对灰度图像进行高斯模糊imgBlur = cv2.GaussianBlur(imgGray, (5, 5), 1)# 使用Canny边缘检测算法得到边缘图像imgCanny = cv2.Canny(imgBlur, cThr[0], cThr[1])# 对Canny边缘图像进行膨胀操作kernel = np.ones((5, 5))imgDial = cv2.dilate(imgCanny, kernel, iterations=3)# 对膨胀后的图像进行腐蚀操作imgThre = cv2.erode(imgDial, kernel, iterations=1)# gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# blurred = cv2.GaussianBlur(gray, (5, 5), 0)# kernal = np.ones((5, 5), np.uint8)# blurred = cv2.erode(blurred, kernal) # 腐蚀# blurred = cv2.erode(blurred, kernal)# edges = cv2.Canny(blurred, 50, 150)# 寻找图像中的轮廓contours, hierarchy = cv2.findContours(imgThre, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)finalContours = []for i in contours:area = cv2.contourArea(i)# 仅保留面积大于minArea的轮廓if area > minArea:peri = cv2.arcLength(i, True)approx = cv2.approxPolyDP(i, 0.02 * peri, True)bbox = cv2.boundingRect(approx)if filter > 0:# 如果指定了过滤条件,仅保留满足条件的轮廓if len(approx) == filter:finalContours.append([len(approx), area, approx, bbox, i])else:finalContours.append([len(approx), area, approx, bbox, i])# 根据面积对轮廓进行排序finalContours = sorted(finalContours, key=lambda x: x[1], reverse=True)if draw:# 将保留的轮廓在原始图像上绘制出来for con in finalContours:cv2.drawContours(img, con[4], -1, (0, 0, 255), 3)return img, finalContoursdef dectshow(org_img, boxs):img = org_img.copy()for box in boxs:cv2.rectangle(img, (int(box[0]), int(box[1])), (int(box[2]), int(box[3])), (0, 255, 0), 2)x1 = box[0]y1 = box[1]x2 = box[2]y2 = box[3]cv2.circle(img, (x1, y1), 5, (0, 0, 255), -1) # 红色圆点cv2.circle(img, (x2, y1), 5, (0, 255, 0), -1) # 绿色圆点cv2.circle(img, (x2, y2), 5, (255, 0, 0), -1) # 蓝色圆点point1 = [x1, y1]point2 = [x2, y1]point3 = [x2, y2]width = math.sqrt((point2[0] - point1[0]) ** 2 + (point2[1] - point1[1]) ** 2)height = math.sqrt((point3[0] - point2[0]) ** 2 + (point3[1] - point2[1]) ** 2)width = width/3height = height/3# cv2.imshow('1', img)# 计算两点之间的距离print("宽 is:", width, "m")print("长 is:", height, "m")cv2.putText(img, f'W: {str(width)[:4] }mm H: {str(height)[:4]}mm', (int(box[0]), int(box[1]) - 40), cv2.FONT_HERSHEY_SIMPLEX, 0.5,(0, 255, 0), 2)cv2.imshow('dec_img', img)return img# 对角点排序函数
def reorder(myPoints):myPointsNew = np.zeros_like(myPoints)myPoints = myPoints.reshape((4, 2))add = myPoints.sum(1)myPointsNew[0] = myPoints[np.argmin(add)]myPointsNew[3] = myPoints[np.argmax(add)]diff = np.diff(myPoints, axis=1)myPointsNew[1] = myPoints[np.argmin(diff)]myPointsNew[2] = myPoints[np.argmax(diff)]return myPointsNew# 透视变换函数
def warpImg(img, points, w, h, pad=20):points = reorder(points)pts1 = np.float32(points)pts2 = np.float32([[0, 0], [w, 0], [0, h], [w, h]])matrix = cv2.getPerspectiveTransform(pts1, pts2)imgWarp = cv2.warpPerspective(img, matrix, (w, h))imgWarp = imgWarp[pad:imgWarp.shape[0] - pad, pad:imgWarp.shape[1] - pad]return imgWarp# 计算两点之间的距离
def findDis(pts1, pts2):return ((pts2[0] - pts1[0]) ** 2 + (pts2[1] - pts1[1]) ** 2) ** 0.5

相关文章:
基于单目相机的2D测量(工件尺寸和物体尺寸)
目录 1.简介 2.基于单目相机的2D测量 2.1 想法: 2.2 代码思路 2.2 主函数部分 1.简介 基于单目相机的2D测量技术在许多领域中具有重要的背景和意义。 工业制造:在工业制造过程中,精确测量是确保产品质量和一致性的关键。基于单目相机的2…...
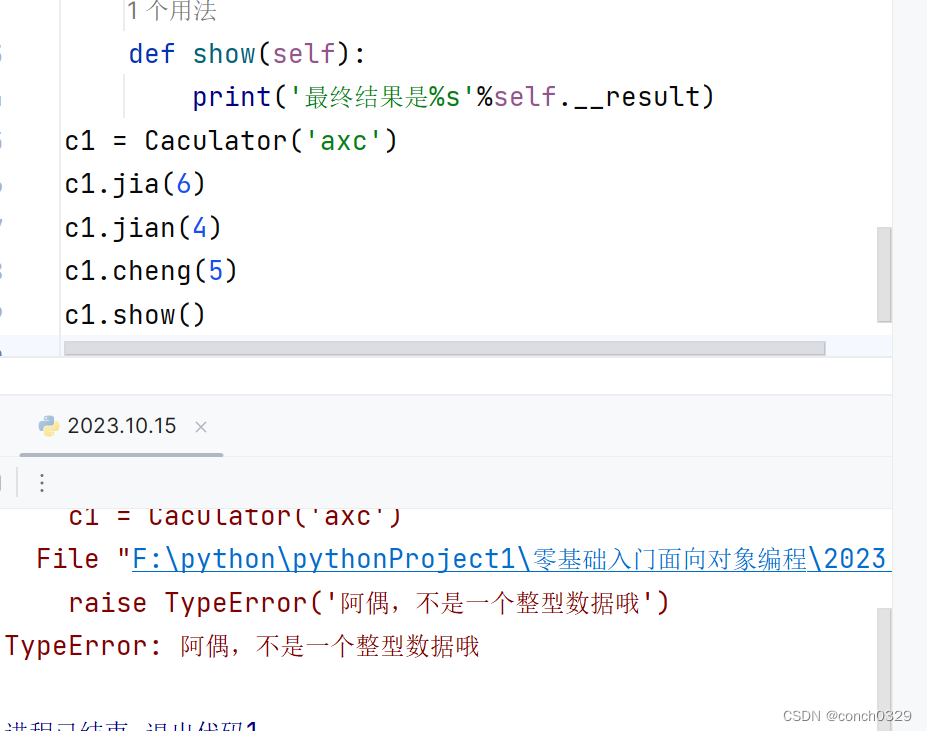
23面向对象案例1
目录 1、计算连续表达式的一个过程 2、优化后的代码 为什么不能return resultn? 3、用面向对象的方法可以解决冗余的问题,但是还是不能解决result的值可以被随意修改的问题 4、解决不能被随意修改的问题,可以将类属性改成私有变量吗&…...

go语言基础之常量与itoa
视频学习地址:Go零基础入门_在线视频教程-CSDN程序员研修院 一. 常量 定义:常量是一个简单值的标识符,在程序运行时,不会被修改的量。注意:常量中的数据类型只可以是布尔型、数字型(整数型、浮点型和复数…...
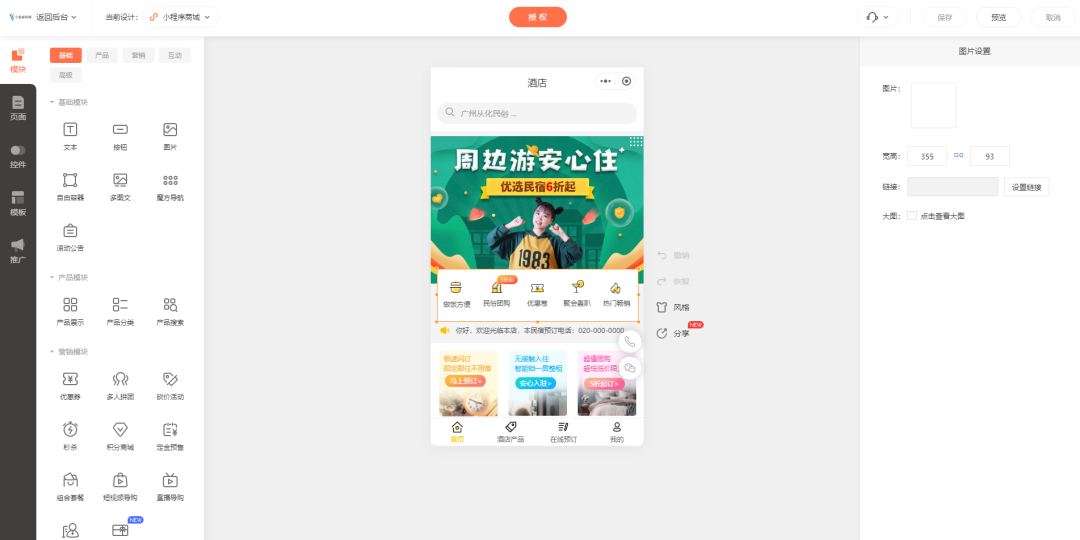
民宿酒店订房房态商城小程序的作用是什么
外出旅游出差,酒店民宿总是很好的选择,随着经济复苏,各地旅游及外出办公人次增多,酒店成绩随之增加,市场呈现多品牌酒店经营形式。 区别于以前,如今互联网深入各个行业,酒店经营也面临着困境。…...

acwing算法基础之数据结构--栈和队列
目录 1 知识点2 模板 1 知识点 栈:先进后出。先进的就是栈底,后进的就是栈顶。后进先出嘛,所以在栈顶弹出元素。 队列:先进先出。先进的就是队头,后进的就是队尾。先进先出嘛,所以在队头弹出元素。 单调…...

关于导出的Excel文件的本质
上篇文章中提到关于xlsx改造冻结窗格的代码,我是怎么知道要加pane的呢,加下来就把我的心路历程记录一下。 我改造之前也是没有头绪的,我网上查了很多,只告诉我如何使用,但源码里没有针对!freeze的处理,所以…...

Rust中FnOnce如何传递给一个约束Fn的回调
Rust中FnOnce如何传递给一个约束Fn的回调 下面的代码,set_cb(func);会报错,如何包装能够做到这样的效果: fn set_cb<F: Fn() static>(handler: F) {handler(); }fn main() {let join_handle std::thread::spawn(|| {});let func |…...

【JUC】线程通信与等待唤醒机制
文章目录 1. 线程通信2. Object类中的wait和notify方法实现等待和唤醒3. Condition接口中的await和signal方法实现等待和唤醒4. LockSupport实现等待和唤醒4.1 优点 1. 线程通信 多个线程在处理同一个资源,但是处理的动作(线程的任务)却不相…...
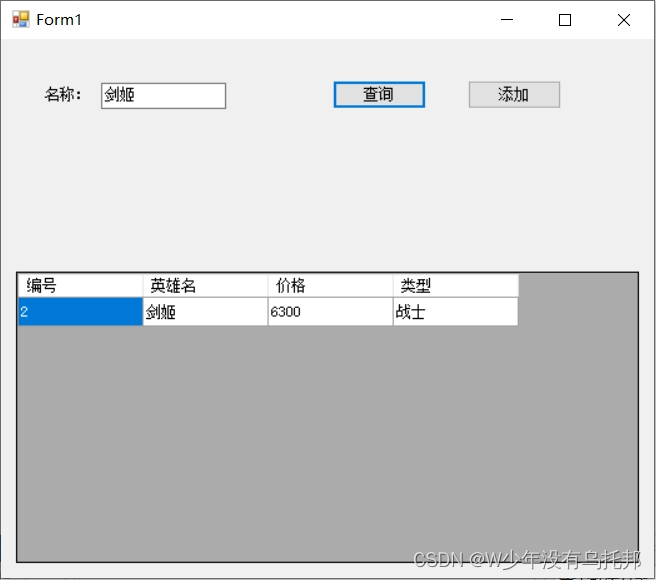
C#面对对象(英雄联盟人物管理系统)
目录 英雄信息类 因为要在两个窗体里面调用字典,所以要写两个类来构建全局变量 添加功能 查询功能 英雄信息类 using System; using System.Collections.Generic; using System.Linq; using System.Text; using System.Threading.Tasks; namespace WindowsFormsApp…...
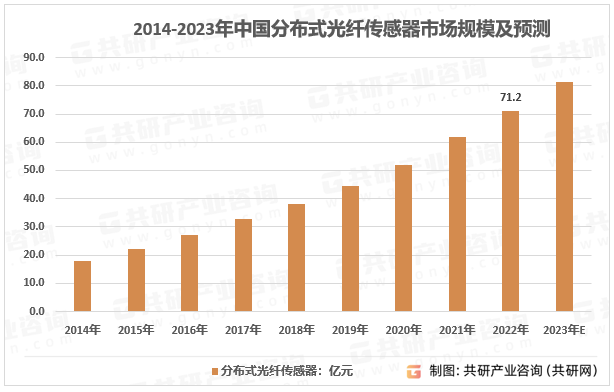
2023年中国分布式光纤传感产量、需求量及行业市场规模分析[图]
分布式光纤传感器中的光纤能够集传感、传输功能于一体,能够完成在整条光纤长度上环境参量的空间、时间多维连续测量,具有结构简单、易于布设、性价比高、易实现长距离等独特优点,常用的分布式光纤传感器有光时域反射仪、布里渊分析仪、喇曼反…...

B2R Raven: 2靶机渗透
B2R Raven: 2靶机渗透 视频参考:ajest :https://www.zhihu.com/zvideo/1547357583714775040?utm_id0 原文参考:ajest :https://zhuanlan.zhihu.com/p/270343652 文章目录 B2R Raven: 2靶机渗透1 启动靶机,查看后网卡…...

SpringBoot-黑马程序员-学习笔记(六)
目录 76.常用计量单位使用 77.bean属性校验 81.测试表现层 82.发送虚拟请求 94.springboot读写redis的客户端 100.ElasticSearch(简称ES) 一个分布式全文搜索引擎 76.常用计量单位使用 Data Component ConfigurationProperties(prefix "serve…...
unity2022版本 实现手机虚拟操作杆
简介 在许多移动游戏中,虚拟操纵杆是一个重要的用户界面元素,用于控制角色或物体的移动。本文将介绍如何在Unity中实现虚拟操纵杆,提供了一段用于移动控制的代码。我们将讨论不同类型的虚拟操纵杆,如固定和跟随,以及如…...

『GitHub Actions』部署静态博客指南
前言 之前博主是使用的 Jenkins 实现 vuepress 博客的自动部署与持续交付,但是因为现在迁移服务器到海外,并且服务器配置降低。现在经常出现服务器的 Jenkins 构建过程中 CPU 占用率过高,导致服务器卡死 然后我想的话既然只是部署静态博客&…...

WPF Datagrid Header数据绑定,表头复选框实现全选、全否、部分选中,根据条目动态变化
制作一个根表头为CheckBox可全选、全不选的列表,且可根据条目自动调整CheckBox的状态(选中、不选、部分选中)。 本来是想用DataGrid做一个CheckBox的列用于勾选其中的某些行,当时做出来之后想着添加一个全选、全否的功能。做两个…...

Tensorflow2 中对模型进行编译,不同loss函数的选择下输入数据格式需求变化
一、tf2中常用的损失函数介绍 在 TensorFlow 2 中,编译模型时可以选择不同的损失函数来定义模型的目标函数。不同的损失函数适用于不同的问题类型和模型架构。下面是几种常见的损失函数以及它们的作用和适用场景: 1.均方误差(Mean Squared …...
--异常、模块、包)
【python】基础语法(三)--异常、模块、包
异常 代码中出现的报错问题,可能会导致整个代码的停止,为了避免这种情况,有了捕获异常操作; 捕获异常 提前预知可能出错的代码,做好准备,避免因bug导致整个项目停止; try:可能出…...
XGBoost+LR融合
1、背景简介 xgboostlr模型融合方法用于分类或者回归的思想最早由facebook在广告ctr预测中提出,其论文Practical Lessons from Predicting Clicks on Ads at Facebook有对其进行阐述。在这篇论文中他们提出了一种将xgboost作为feature transform的方法。大概的思想…...
leetcode:1929. 数组串联(python3解法)
难度:简单 给你一个长度为 n 的整数数组 nums 。请你构建一个长度为 2n 的答案数组 ans ,数组下标 从 0 开始计数 ,对于所有 0 < i < n 的 i ,满足下述所有要求: ans[i] nums[i]ans[i n] nums[i] 具体而言&am…...

Epoch和episodes的区别
“Epoch” 和 “episode” 是两个不同的概念,通常在不同领域中使用。 Epoch(周期): Epoch 是一个在机器学习和深度学习中常用的术语,通常用于表示训练数据集中的一个完整遍历。在每个 epoch 中,整个训练数据…...

C# 核心技术解析:Parse vs TryParse 实战指南
文章目录1. 核心区别:暴力型 vs. 稳重型Parse: 默认数据正确TryParse: 典型的 C# 模式示例2. 执行流程图3. 性能4. 高性能方案4.1. 高性能转换:Span<char> 与 Utf8Parser4.2. 执行流程:内存视角4.3. 类型转换对比5. 易混淆在 C# 处理字…...

异构数据库迁移利器:dbswitch实现多源数据高效同步
1. 异构数据库迁移的痛点与常见方案 第一次接触异构数据库迁移时,我被各种工具搞得晕头转向。当时公司需要把Oracle的业务数据同步到Greenplum做分析,试了好几种方案都不太理想。比如用kettle配置gpload,光是理解那些参数就花了两天时间&…...

Torch-Pruning高效剪枝实战:解决BERT模型部署中的计算资源瓶颈问题
Torch-Pruning高效剪枝实战:解决BERT模型部署中的计算资源瓶颈问题 【免费下载链接】Torch-Pruning [CVPR 2023] Towards Any Structural Pruning; LLMs / Diffusion / Transformers / YOLOv8 / CNNs 项目地址: https://gitcode.com/gh_mirrors/to/Torch-Pruning …...

用Cursor+LocalStorage实现无后端项目管理:前端开发者的轻量级解决方案
用CursorLocalStorage实现无后端项目管理:前端开发者的轻量级解决方案 在当今快节奏的开发环境中,前端开发者常常需要快速搭建小型项目管理工具来跟踪个人或团队的工作进度。传统方案往往需要配置数据库、搭建后端API,这对于简单需求来说显得…...

DoubletFinder实战指南:精准识别单细胞测序中的双细胞干扰
1. 双细胞干扰:单细胞测序中的"隐形杀手" 做单细胞测序分析的朋友们应该都遇到过这种情况:明明细胞分群很清晰,但总有几个"奇怪"的cluster既表达A细胞标志物又表达B细胞特征。这种情况很可能就是遇到了双细胞干扰——两个…...

VisualVM安全监控指南:敏感数据保护与权限管理
VisualVM安全监控指南:敏感数据保护与权限管理 【免费下载链接】visualvm VisualVM is an All-in-One Java Troubleshooting Tool 项目地址: https://gitcode.com/gh_mirrors/vi/visualvm VisualVM作为一款强大的Java应用性能监控与故障诊断工具,…...

BERT自然语言处理模型:从入门到实践完整指南
BERT自然语言处理模型:从入门到实践完整指南 【免费下载链接】bert TensorFlow code and pre-trained models for BERT 项目地址: https://gitcode.com/gh_mirrors/be/bert BERT(Bidirectional Encoder Representations from Transformers&#x…...

UnrealPakViewer工具解析:UE4资源管理的可视化解决方案
UnrealPakViewer工具解析:UE4资源管理的可视化解决方案 【免费下载链接】UnrealPakViewer 查看 UE4 Pak 文件的图形化工具,支持 UE4 pak/ucas 文件 项目地址: https://gitcode.com/gh_mirrors/un/UnrealPakViewer UnrealPakViewer是一款专为UE4开…...

AI辅助学术写作:Qwen3-0.6B-FP8搭配LaTeX生成论文章节与参考文献
AI辅助学术写作:Qwen3-0.6B-FP8搭配LaTeX生成论文章节与参考文献 写论文,尤其是写引言和参考文献,是不是让你特别头疼?对着空白的文档发呆,不知道从何下笔;或者为了找一篇关键的参考文献,在数据…...

手把手教你用Wireshark抓包分析Opener EIP通信,快速定位ForwardOpen失败原因
深度解析EtherNet/IP通信:用Wireshark诊断ForwardOpen失败的实战指南 当你在MCU上成功移植了Opener协议栈,TCP连接建立正常,却在关键时刻遭遇ForwardOpen失败时,那种挫败感我深有体会。去年在汽车生产线控制系统项目中,…...