ubuntu20.04 MYNTEYE S 相机运行与标定记录
ubuntu20.04 MYNTEYE S 相机运行与标定记录
环境
ubuntu20.04
opencv3.3.1
硬件
mynteye S1030
OpenCV 3.4.3 安装
Jetson Nano+小觅相机(MYNT EYE S)开发调试指南
mkdir -p ~/tools/opencv
cd ~/tools/opencvgit clone https://github.com/opencv/opencv.git
cd opencv/
git checkout tags/3.4.3cd ~/tools/opencv
mv opencv opencv-3.4.3
cd opencv-3.4.3/mkdir build
cd build
cmake -DCMAKE_INSTALL_PREFIX=/home/robot/tools/opencv/opencv-3.4.3/build/installed ..
make
make install
cv_bridge配置
mkdir -p ~/workspace/MYNT_EYE/S_SDK/src
cd ~/workspace/MYNT_EYE/S_SDK/srccatkin initgit clone https://github.com/ros-perception/vision_opencv.git --branch melodic # melodic对应1.13版本mv vision_opencv/cv_bridge ./
rm -rf vision_opencv# 修改CMakeLists.txt和package.xml中的package name为cv_bridge_3
catkin_make
MYNT-EYE-S-SDK
cd ~/workspace/MYNT_EYE/S_SDK/src
git clone https://github.com/slightech/MYNT-EYE-S-SDK.git
cd MYNT-EYE-S-SDK
make install # 见ERROR 1cd ~/workspace/MYNT_EYE/S_SDK
catkin_make # 见ERROR 2 3 4 5# 测试
cd ~/workspace/MYNT_EYE/S_SDK
source devel/setup.bash
roslaunch mynt_eye_ros_wrapper display.launchERROR 1:
忘记是什么报错了,忘记复制了。但是是cv相关的报错,是因为忘记添加OpenCV_LIB_PATH了。
FIX:
在MYNT-EYE-S-SDK/CMakeLists.txt中添加
set(OpenCV_DIR /home/robot/tools/opencv/opencv-3.4.3/build)
set(OpenCV_LIB_PATH /home/robot/tools/opencv/opencv-3.4.3/build/installed/lib)
ERROR 2:
-- Could NOT find cv_bridge (missing: cv_bridge_DIR)
-- Could not find the required component 'cv_bridge'. The following CMake error indicates that you either need to install the package with the same name or change your environment so that it can be found.
CMake Error at /opt/ros/noetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):Could not find a package configuration file provided by "cv_bridge" withany of the following names:cv_bridgeConfig.cmakecv_bridge-config.cmakeAdd the installation prefix of "cv_bridge" to CMAKE_PREFIX_PATH or set"cv_bridge_DIR" to a directory containing one of the above files. If"cv_bridge" provides a separate development package or SDK, be sure it hasbeen installed.
Call Stack (most recent call first):MYNT-EYE-S-SDK/wrappers/ros/src/mynt_eye_ros_wrapper/CMakeLists.txt:36 (find_package)-- Configuring incomplete, errors occurred!
See also "/home/robot/tools/MYNT_EYE/S_SDK/build/CMakeFiles/CMakeOutput.log".
See also "/home/robot/tools/MYNT_EYE/S_SDK/build/CMakeFiles/CMakeError.log".
Invoking "cmake" failed
FIX:
在catkin_ws中增加了cv_bridge并将其package修改为了cv_bridge_3,但是在SDK中的wrappers/ros/src中的CMakeLists.txt中将find_package中的cv_bridge也要修改成对应空间中的cv_bridge_3.
find_package(catkin REQUIRED COMPONENTScv_bridge_3geometry_msgsimage_transportmessage_generationnodeletroscppsensor_msgsstd_msgstf
)
ERROR 3:
-- Could NOT find image_transport (missing: image_transport_DIR)
-- Could not find the required component 'image_transport'. The following CMake error indicates that you either need to install the package with the same name or change your environment so that it can be found.
CMake Error at /opt/ros/noetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):Could not find a package configuration file provided by "image_transport"with any of the following names:image_transportConfig.cmakeimage_transport-config.cmakeAdd the installation prefix of "image_transport" to CMAKE_PREFIX_PATH orset "image_transport_DIR" to a directory containing one of the above files.If "image_transport" provides a separate development package or SDK, besure it has been installed.
Call Stack (most recent call first):MYNT-EYE-S-SDK/wrappers/ros/src/mynt_eye_ros_wrapper/CMakeLists.txt:36 (find_package)-- Configuring incomplete, errors occurred!
See also "/home/robot/tools/MYNT_EYE/S_SDK/build/CMakeFiles/CMakeOutput.log".
See also "/home/robot/tools/MYNT_EYE/S_SDK/build/CMakeFiles/CMakeError.log".
make: *** [Makefile:782: cmake_check_build_system] Error 1
Invoking "make cmake_check_build_system" failed
找不到image_transport
FIX:
在wrappers/ros/src/CMakeLists.txt中添加set(image_transport_DIR /opt/ros/noetic/share/image_transport/cmake)
ERROR 4:
-- Could NOT find message_generation (missing: message_generation_DIR)
-- Could not find the required component 'message_generation'. The following CMake error indicates that you either need to install the package with the same name or change your environment so that it can be found.
CMake Error at /opt/ros/noetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):Could not find a package configuration file provided by"message_generation" with any of the following names:message_generationConfig.cmakemessage_generation-config.cmakeAdd the installation prefix of "message_generation" to CMAKE_PREFIX_PATH orset "message_generation_DIR" to a directory containing one of the abovefiles. If "message_generation" provides a separate development package orSDK, be sure it has been installed.
Call Stack (most recent call first):MYNT-EYE-S-SDK/wrappers/ros/src/mynt_eye_ros_wrapper/CMakeLists.txt:38 (find_package)-- Configuring incomplete, errors occurred!
See also "/home/robot/tools/MYNT_EYE/S_SDK/build/CMakeFiles/CMakeOutput.log".
See also "/home/robot/tools/MYNT_EYE/S_SDK/build/CMakeFiles/CMakeError.log".
make: *** [Makefile:782: cmake_check_build_system] Error 1
Invoking "make cmake_check_build_system" failed
找不到message_generation。
FIX:
在wrappers/ros/src/CMakeLists.txt中添加set(message_generation_DIR /opt/ros/noetic/share/message_generation/cmake)
ERROR 5:
[ 88%] Linking CXX shared library /home/robot/tools/MYNT_EYE/S_SDK/devel/lib/libmynteye_wrapper.so
/usr/bin/ld: cannot find -lBoost::filesystem
collect2: error: ld returned 1 exit status
make[2]: *** [MYNT-EYE-S-SDK/wrappers/ros/src/mynt_eye_ros_wrapper/CMakeFiles/mynteye_wrapper.dir/build.make:144: /home/robot/tools/MYNT_EYE/S_SDK/devel/lib/libmynteye_wrapper.so] Error 1
make[1]: *** [CMakeFiles/Makefile2:2035: MYNT-EYE-S-SDK/wrappers/ros/src/mynt_eye_ros_wrapper/CMakeFiles/mynteye_wrapper.dir/all] Error 2
make: *** [Makefile:141: all] Error 2
Invoking "make -j8 -l8" failed
找不到Boost::filesystem
FIX:
修改wrappers/ros/src/CMakeLists.txt。
find_package(Boost REQUIRED COMPONENTS filesystem)
include_directories(${Boost_INCLUDE_DIRS})
S 系列相机标定
IMU标定
roslaunch mynt_eye_ros_wrapper vins_fusion.launch
rosbag record -O IMU_mynteye_s_calibration /mynteye/imu/data_raw
录制一个小时以上
roslaunch imu_utils mynteye_imu_calibration.launchrosbag play -r 200 IMU_mynteye_s_calibration.bag
标注
后续再继续标定,目前出现问题:
- 同样的IMU标定流程,手中的mynteye D相机正常标定,但是S相机标定时ERROR
- 双目标定时,mynteye D相机正常,但是S相机无法降低采样频率,每次降到4hz,相机进程就会被杀死。不清楚是不是因为驱动。
决定还是试试D455,主要目的是将D455标定结果和mynteye D相机进行对比。
相关文章:

ubuntu20.04 MYNTEYE S 相机运行与标定记录
ubuntu20.04 MYNTEYE S 相机运行与标定记录 环境 ubuntu20.04 opencv3.3.1 硬件 mynteye S1030 OpenCV 3.4.3 安装 Jetson Nano小觅相机(MYNT EYE S)开发调试指南 mkdir -p ~/tools/opencv cd ~/tools/opencvgit clone https://github.com/opencv/opencv.git cd opencv/…...
有效降低数据库存储成本方案与实践 | 京东云技术团队
背景 随着平台的不断壮大,业务的不断发展,后端系统的数据量、存储所使用的硬件成本也逐年递增。从发展的眼光看,业务与系统要想健康的发展,成本增加的问题必须重视起来。目前业界普遍认同开源节流大方向,很多企业部门…...
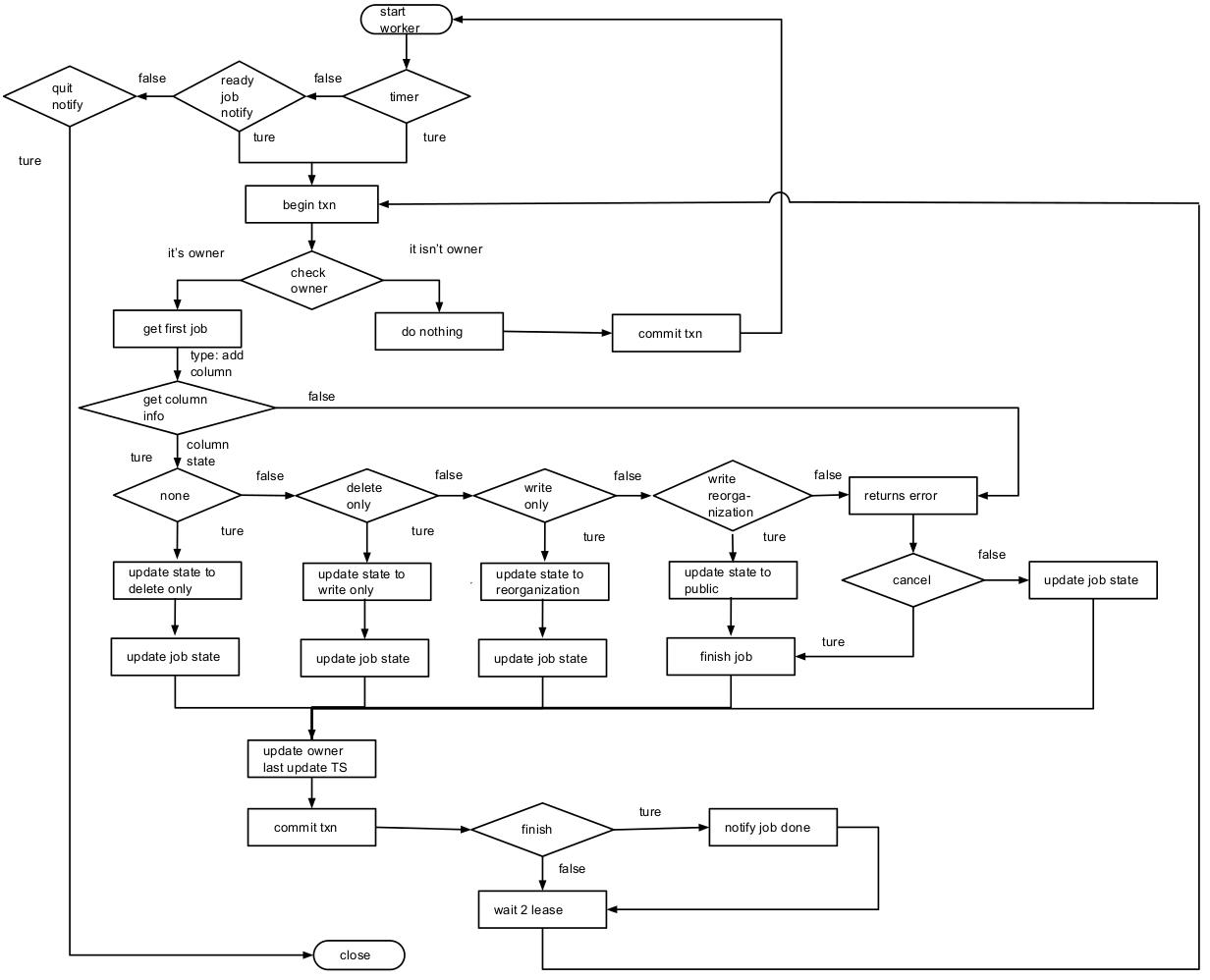
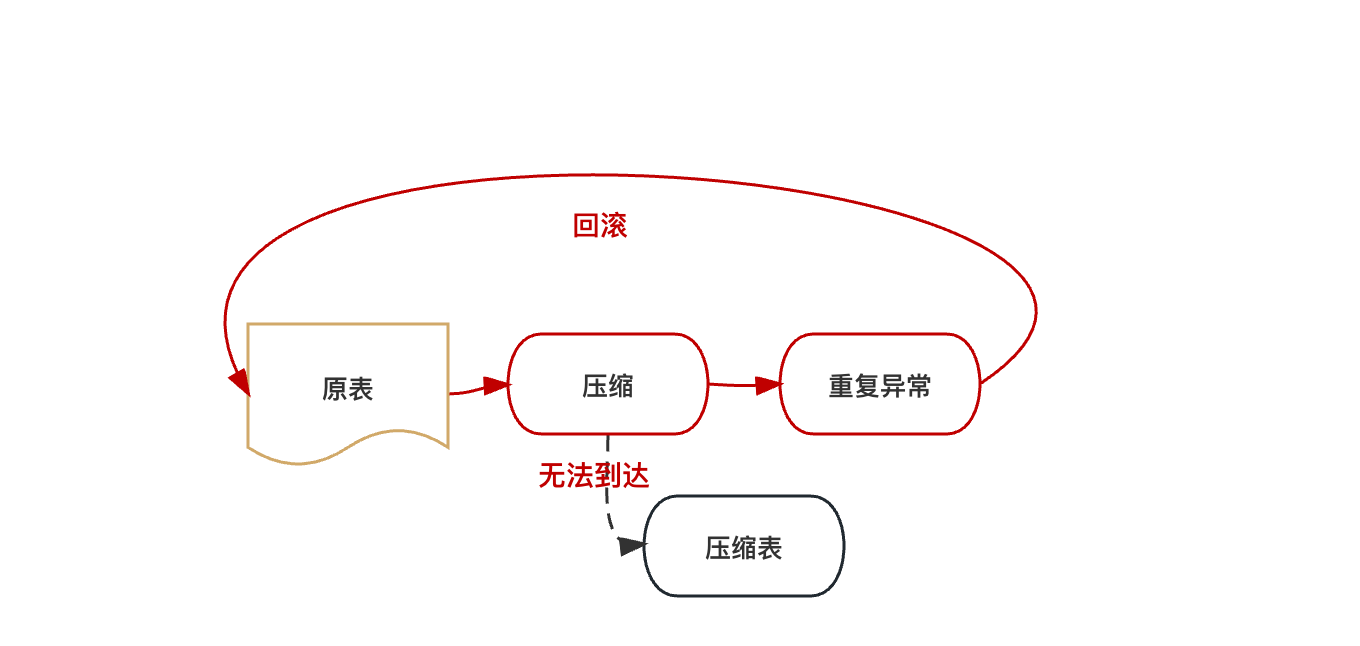
分布式数据库Schema 变更 in F1 TiDB
分布式数据库Schema 变更 in F1 & TiDB 【转载】TiDB 源码阅读系列文章(十七)DDL 源码解析 | PingCAP 上述文章主要叙述了从DDL语句发起到执行的过程,简单介绍了弄一套相同的模式来后台处理数据回填,从而提高DDL的并发度的一…...

图形库篇 | EasyX | 图像处理
图形库篇 | EasyX | 图像处理 图像类型 IMAGE表示图像,用于定义一个图像变量,与导入的图片资源一一对应。 IMAGE img;加载与绘制图像 函数功能函数加载图像void loadimage(IMAGE* pDstImg,LPCTSTR pImgFile,int nwidth = 0,int nHeight = 0,bool bResize = false)绘制图像v…...

AWTK UI 自动化测试工具发布
AWTK UI 自动化 提供了兼容 Appium 的接口,可以使用 Appium 的工具来进行 UI 自动化测试。但是使用起来有点麻烦,用的人不多,所以最终决定开发一个 AWTK 专用的 UI 自动化测试工具。相比 Appium,这个工具有下列特点: …...
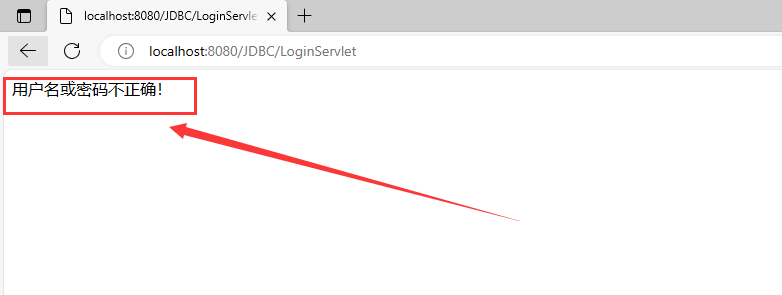
Java后端开发——JDBC入门实验
JDBC(Java Database Connectivity)是Java编程语言中用于与数据库建立连接并进行数据库操作的API(应用程序编程接口)。JDBC允许开发人员连接到数据库,执行各种操作(如插入、更新、删除和查询数据)…...

LCA
定义 最近公共祖先简称 LCA(Lowest Common Ancestor)。两个节点的最近公共祖先,就是这两个点的公共祖先里面,离根最远的那个。 性质 如果 不为 的祖先并且 不为 的祖先,那么 分别处于 的两棵不同子树中&#…...

ts学习02-数据类型
新建index.html <!DOCTYPE html> <html lang"zh-CN"> <head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>Document</title> </h…...
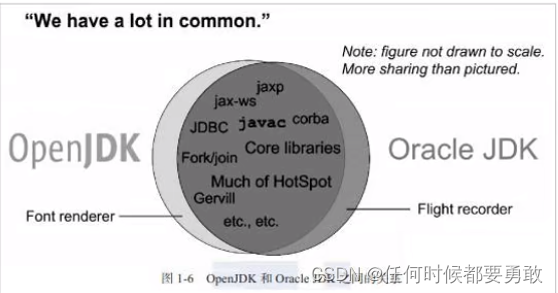
javaSE的发展历史以及openjdk和oracleJdk
1 JavaSE 的发展历史 1.1 Java 语言的介绍 SUN 公司在 1991 年成立了一个称为绿色计划(Green Project)的项目,由 James Gosling(高斯林)博士领导,绿色计划的目的是开发一种能够在各种消费性电子产品&…...
【入门Flink】- 10基于时间的双流联合(join)
统计固定时间内两条流数据的匹配情况,需要自定义来实现——可以用窗口(window)来表示。为了更方便地实现基于时间的合流操作,Flink 的 DataStrema API 提供了内置的 join 算子。 窗口联结(Window Join) 一…...

【Python Opencv】图片与视频的操作
文章目录 前言一、opencv图片1.1 读取图像1.2 显示图像1.3 写入图像1.4 示例代码 二、Opencv视频2.1 从相机捕获视频获取摄像头一帧一帧读取显示图片VideoCapture 中的get和set函数示例代码 2.2 从文件播放视频示例代码 2.3 保存视频示例代码 总结 前言 在计算机视觉和图像处理…...
【从入门到起飞】JavaAPI—System,Runtime,Object,Objects类
🎊专栏【JavaSE】 🍔喜欢的诗句:更喜岷山千里雪 三军过后尽开颜。 🎆音乐分享【如愿】 🎄欢迎并且感谢大家指出小吉的问题🥰 文章目录 🍔System类⭐exit()⭐currentTimeMillis()🎄用…...
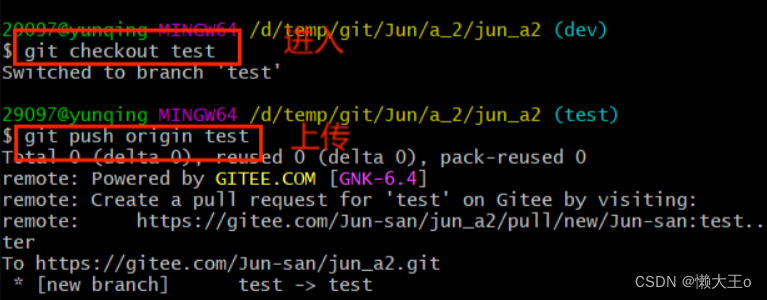
【Git】的分支和标签的讲解及实际应用场景
目录 讲解 环境讲述 分支标签的区别 分支 命令 场景应用 标签 命令 标签规范 讲解 环境讲述 当软件从开发到正式环境部署的过程中,不同环境的作用 开发环境:用于开发人员进行软件开发、测试和调试。在这个环境中,开发人员可以快速地…...
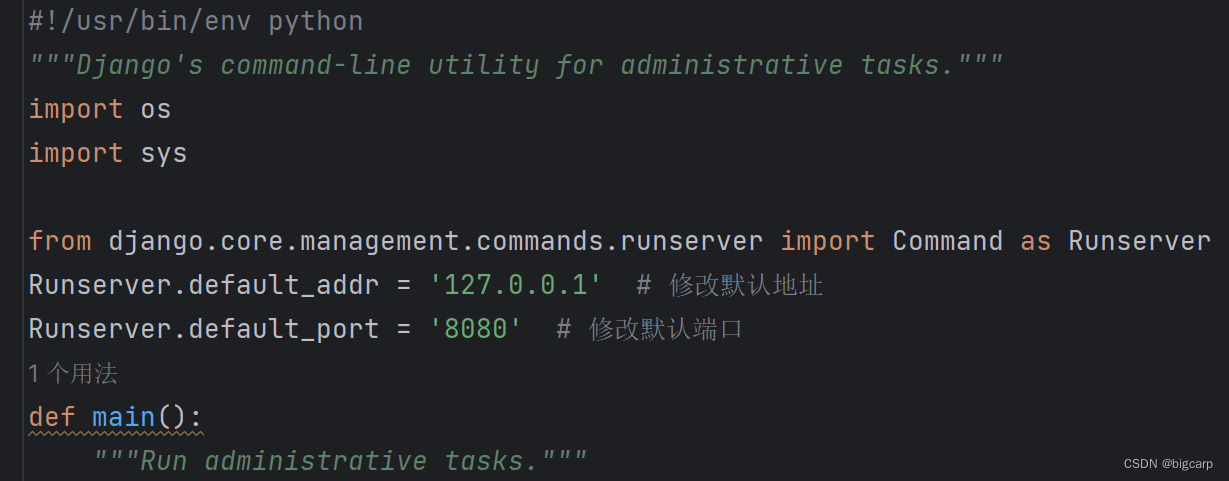
修改django开发环境runserver命令默认的端口
runserver默认8000端口 虽然python manage.py runserver 8080 可以指定端口,但不想每次runserver都添加8080这个参数 可以通过修改manage.py进行修改,只需要加三行: from django.core.management.commands.runserver import Command as Ru…...

kubeadm安装k8s高可用集群
目录 一、环境规划 二、注意事项: 三、环境准备: 1. 关闭防火墙规则,关闭selinux,关闭swap交换: 2. 修改主机名 3. 所有节点修改hosts文件: 4. 所有节点时间同步: 5. 所有节点实现Linux的资…...

来看看电脑上有哪些不为人知的小众软件?
电脑上的各类软件有很多,除了那些常见的大众化软件,还有很多不为人知的小众软件,专注于实用功能,简洁干净、功能强悍。 1.桌面停靠栏工具——BitDock BitDock是一款运行在Windows系统中的桌面停靠栏工具,功能实…...
一个进程最多可以创建多少个线程?
前言 话不多说,先来张脑图~ linux 虚拟内存知识回顾 虚拟内存空间长啥样 在 Linux 操作系统中,虚拟地址空间的内部又被分为内核空间和用户空间两部分,不同位数的系统,地址空间的范围也不同。比如最常见的 32 位和 64 位系统&am…...
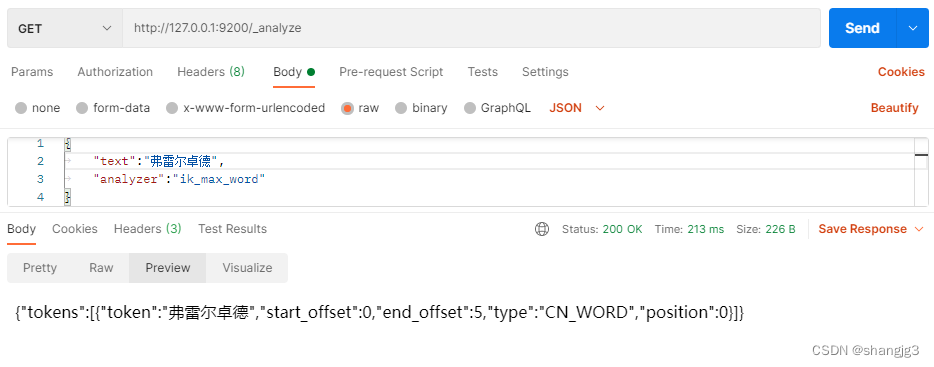
ElasticSearch文档分析
ElasticSearch文档分析 包含下面的过程: 将一块文本分成适合于倒排索引的独立的 词条将这些词条统一化为标准格式以提高它们的“可搜索性”,或者 recall 分析器执行上面的工作。分析器实际上是将三个功能封装到了一个包里: 字符过滤器 首先&a…...
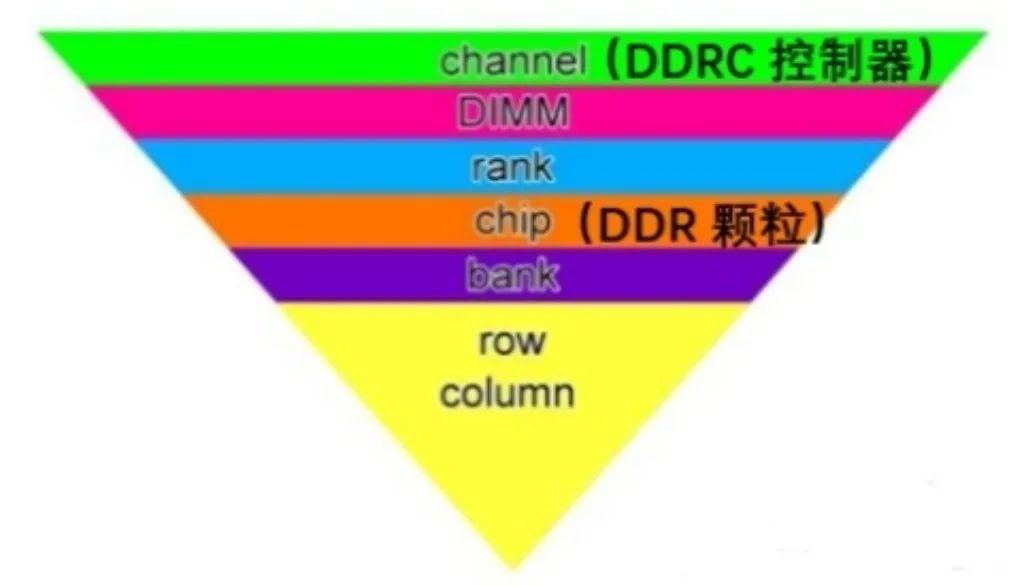
Xilinx FPGA平台DDR3设计详解(一):DDR SDRAM系统框架
DDR SDRAM(双倍速率同步动态随机存储器)是一种内存技术,它可以在时钟信号的上升沿和下降沿都传输数据,从而提高数据传输的速率。DDR SDRAM已经发展了多代,包括DDR、DDR2、DDR3、DDR4和DDR5,每一代都有不同的…...
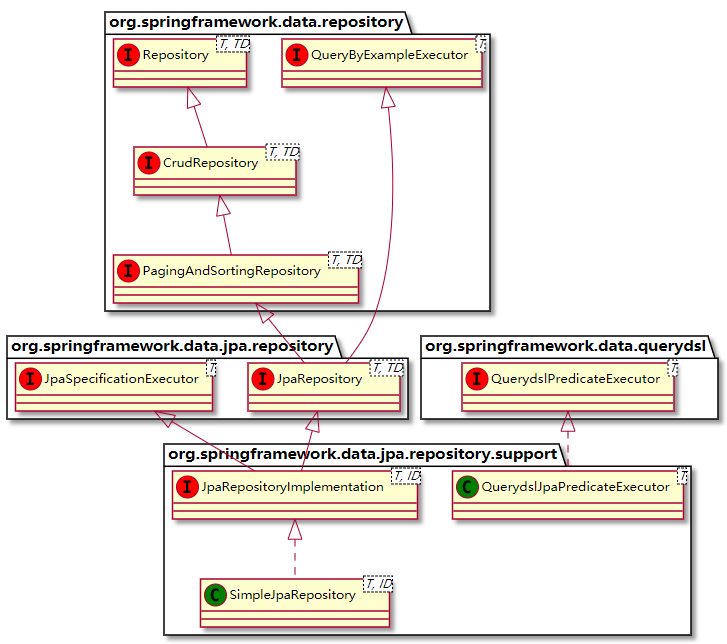
Spring Data JPA方法名命名规则
最近巩固一下JPA,网上看到这些资料,这里记录巩固一下。 一、Spring Data Jpa方法定义的规则 简单条件查询 简单条件查询:查询某一个实体类或者集合。 按照Spring Data的规范的规定,查询方法以find | read | get开头&…...

3步构建微信数据安全防线:WeChatExporter备份工具全解析
3步构建微信数据安全防线:WeChatExporter备份工具全解析 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter 微信聊天记录承载着重要的工作信息与个人回忆&#x…...

OpenClaw对比测试:Qwen3.5-9B与14B版本在自动化任务中的表现
OpenClaw对比测试:Qwen3.5-9B与14B版本在自动化任务中的表现 1. 测试背景与动机 最近在折腾OpenClaw自动化任务时,遇到一个很实际的问题:到底该用Qwen3.5-9B还是14B版本? 这两个版本在官方文档里都标榜"强逻辑推理"和…...

解锁B站资源:DownKyi视频下载的7个实用维度
解锁B站资源:DownKyi视频下载的7个实用维度 【免费下载链接】downkyi 哔哩下载姬downkyi,哔哩哔哩网站视频下载工具,支持批量下载,支持8K、HDR、杜比视界,提供工具箱(音视频提取、去水印等)。 …...

Navicat Premium 16快捷键全攻略:从SQL注释到窗口切换,提升效率的10个必备技巧
Navicat Premium 16快捷键全攻略:从SQL注释到窗口切换,提升效率的10个必备技巧 在数据库管理的日常工作中,效率往往取决于细节。Navicat Premium 16作为一款功能强大的数据库管理工具,其快捷键系统就像隐藏在界面之下的效率引擎。…...

java架构一/1:微服务电商/地基/登录
一、构建聚合工程(Java-Maven)foodie-dev为父工程,其他为子模块。foodie-dev-api的pom.xml引入依赖-service,-service引入-mapper,-mapper引入-pojo,-pojo引入-common。二、使用PDMan进行数据库建模&#x…...

算法——bfs/dfs
Find The Multiple 给定一个正整数 n,编写一个程序找出 n 的一个非零倍数 m,其十进制表示只包含数字 0 和 1。可以假设 n 不大于 200,并且存在一个 m,其十进制表示不超过 100 位。 输入 输入文件可能包含多个测试用例。每一行包含…...

OpenClaw多模态实践:Qwen3.5-9B解析截图中的图表数据
OpenClaw多模态实践:Qwen3.5-9B解析截图中的图表数据 1. 为什么需要自动化图表解析 科研工作中最耗时的环节之一,就是手动从论文图表中提取数据点。我曾为了一篇综述文章,花了整整三天时间从30多张折线图中抄录数据。这种重复劳动不仅效率低…...

WebLaTeX终极指南:免费在线LaTeX编辑器,让学术写作变得如此简单
WebLaTeX终极指南:免费在线LaTeX编辑器,让学术写作变得如此简单 【免费下载链接】WebLaTex A complete alternative for Overleaf with VSCode Web Git Integration Copilot Grammar & Spell Checker Live Collaboration Support. Based on Git…...
)
企业网络架构设计:如何选择核心交换机、汇聚交换机和接入交换机(含真实案例)
企业网络架构设计实战:核心层、汇聚层与接入层交换机选型指南 当一家200人规模的制造企业决定升级网络基础设施时,IT负责人发现市场上交换机的型号多达上千种,价格从几百元到几十万元不等。核心交换机是否必须选用思科Catalyst 9500系列&…...
的裂缝检测识别系统,附GUI界面、特征参数计算与Excel...)
基于MATLAB与机器学习(SVM)的裂缝检测识别系统,附GUI界面、特征参数计算与Excel...
基于MATLAB和机器学习(向量机)的裂缝检测(识别)系统程序,带GUI界面,对裂缝主要参数(长度,宽度,面积)进行计算,已经训练好分类器,包含裂…...