51单片机简单控制180度舵机
代码:
链接:https://pan.baidu.com/s/1K9dg2NwRhy49db_O_hqv-g?pwd=1234
提取码:1234
一、路线
我在了解这个舵机之前最像想看到的是一个完全的路径。
比如我想学习b站上那个智能门锁,那就得每个模块的基本代码都会才能结合各个部分。那你第一步就是准备好硬件和软件环境,如果你备赛过蓝桥杯杯比赛的话,软件和基本代码知识这些不用说,硬件的话
1.去购物软件搜一下SG90舵机,一大堆,你想买哪个就买哪个;
2.找商家要资料,里面有参考代码,这对于快速上手很有帮助;
3.结合之前蓝桥杯比赛的代码知识,然后在csdn上搜原理是什么,笔者没附上原理讲解是因为别人写好的文章真的可以碾压我,适应别人的写法,然后自己重新默写一遍;
4.最最有意思的一步就是将你的智能门锁加上这个功能,门锁的第一步就是通过按键输入密码开门,你可以加上密码成功输入后就让舵机转过特定角度来开门。
路径就是这么个路径,其中笔者感觉难在你要复习之前的知识,不过很快上手就是了。
二、代码上的一些分享
新建工程
调用江科大写好的代码
LCD1602.c
#include <REGX52.H>//引脚配置:
sbit LCD_RS=P2^6;
sbit LCD_RW=P2^5;
sbit LCD_EN=P2^7;
#define LCD_DataPort P0//函数定义:
/*** @brief LCD1602延时函数,12MHz调用可延时1ms* @param 无* @retval 无*/
void LCD_Delay()
{unsigned char i, j;i = 2;j = 239;do{while (--j);} while (--i);
}/*** @brief LCD1602写命令* @param Command 要写入的命令* @retval 无*/
void LCD_WriteCommand(unsigned char Command)
{LCD_RS=0;LCD_RW=0;LCD_DataPort=Command;LCD_EN=1;LCD_Delay();LCD_EN=0;LCD_Delay();
}/*** @brief LCD1602写数据* @param Data 要写入的数据* @retval 无*/
void LCD_WriteData(unsigned char Data)
{LCD_RS=1;LCD_RW=0;LCD_DataPort=Data;LCD_EN=1;LCD_Delay();LCD_EN=0;LCD_Delay();
}/*** @brief LCD1602设置光标位置* @param Line 行位置,范围:1~2* @param Column 列位置,范围:1~16* @retval 无*/
void LCD_SetCursor(unsigned char Line,unsigned char Column)
{if(Line==1){LCD_WriteCommand(0x80|(Column-1));}else if(Line==2){LCD_WriteCommand(0x80|(Column-1+0x40));}
}/*** @brief LCD1602初始化函数* @param 无* @retval 无*/
void LCD_Init()
{LCD_WriteCommand(0x38);//八位数据接口,两行显示,5*7点阵LCD_WriteCommand(0x0c);//显示开,光标关,闪烁关LCD_WriteCommand(0x06);//数据读写操作后,光标自动加一,画面不动LCD_WriteCommand(0x01);//光标复位,清屏
}/*** @brief 在LCD1602指定位置上显示一个字符* @param Line 行位置,范围:1~2* @param Column 列位置,范围:1~16* @param Char 要显示的字符* @retval 无*/
void LCD_ShowChar(unsigned char Line,unsigned char Column,char Char)
{LCD_SetCursor(Line,Column);LCD_WriteData(Char);
}/*** @brief 在LCD1602指定位置开始显示所给字符串* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param String 要显示的字符串* @retval 无*/
void LCD_ShowString(unsigned char Line,unsigned char Column,char *String)
{unsigned char i;LCD_SetCursor(Line,Column);for(i=0;String[i]!='\0';i++){LCD_WriteData(String[i]);}
}/*** @brief 返回值=X的Y次方*/
int LCD_Pow(int X,int Y)
{unsigned char i;int Result=1;for(i=0;i<Y;i++){Result*=X;}return Result;
}/*** @brief 在LCD1602指定位置开始显示所给数字* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~65535* @param Length 要显示数字的长度,范围:1~5* @retval 无*/
void LCD_ShowNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length)
{unsigned char i;LCD_SetCursor(Line,Column);for(i=Length;i>0;i--){LCD_WriteData(Number/LCD_Pow(10,i-1)%10+'0');}
}/*** @brief 在LCD1602指定位置开始以有符号十进制显示所给数字* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:-32768~32767* @param Length 要显示数字的长度,范围:1~5* @retval 无*/
void LCD_ShowSignedNum(unsigned char Line,unsigned char Column,int Number,unsigned char Length)
{unsigned char i;unsigned int Number1;LCD_SetCursor(Line,Column);if(Number>=0){LCD_WriteData('+');Number1=Number;}else{LCD_WriteData('-');Number1=-Number;}for(i=Length;i>0;i--){LCD_WriteData(Number1/LCD_Pow(10,i-1)%10+'0');}
}/*** @brief 在LCD1602指定位置开始以十六进制显示所给数字* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~0xFFFF* @param Length 要显示数字的长度,范围:1~4* @retval 无*/
void LCD_ShowHexNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length)
{unsigned char i,SingleNumber;LCD_SetCursor(Line,Column);for(i=Length;i>0;i--){SingleNumber=Number/LCD_Pow(16,i-1)%16;if(SingleNumber<10){LCD_WriteData(SingleNumber+'0');}else{LCD_WriteData(SingleNumber-10+'A');}}
}/*** @brief 在LCD1602指定位置开始以二进制显示所给数字* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~1111 1111 1111 1111* @param Length 要显示数字的长度,范围:1~16* @retval 无*/
void LCD_ShowBinNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length)
{unsigned char i;LCD_SetCursor(Line,Column);for(i=Length;i>0;i--){LCD_WriteData(Number/LCD_Pow(2,i-1)%2+'0');}
}
LCD1602.h
#ifndef __LCD1602_H__
#define __LCD1602_H__//用户调用函数:
void LCD_Init();
void LCD_ShowChar(unsigned char Line,unsigned char Column,char Char);
void LCD_ShowString(unsigned char Line,unsigned char Column,char *String);
void LCD_ShowNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);
void LCD_ShowSignedNum(unsigned char Line,unsigned char Column,int Number,unsigned char Length);
void LCD_ShowHexNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);
void LCD_ShowBinNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);#endif实验现象:

按键部分
也可以直接使用江科大的代码,毕竟对按键没有时间上的精确需求。所以用while卡死的方法来操作的话确实是会卡死,看看后面会不会有好方法来解决吧。
key.c
#include "key.h"unsigned char key_read(void)
{unsigned char key_val=17;P1=0xff;P1_3=0;if(P1_7==0){Delay(20);while(P1_7==0);Delay(20);key_val=1;}if(P1_6==0){Delay(20);while(P1_6==0);Delay(20);key_val=5;}if(P1_5==0){Delay(20);while(P1_5==0);Delay(20);key_val=9;}if(P1_4==0){Delay(20);while(P1_4==0);Delay(20);key_val=13;}P1=0xff;P1_2=0;if(P1_7==0){Delay(20);while(P1_7==0);Delay(20);key_val=2;}if(P1_6==0){Delay(20);while(P1_6==0);Delay(20);key_val=6;}if(P1_5==0){Delay(20);while(P1_5==0);Delay(20);key_val=10;}if(P1_4==0){Delay(20);while(P1_4==0);Delay(20);key_val=14;}P1=0xff;P1_1=0;if(P1_7==0){Delay(20);while(P1_7==0);Delay(20);key_val=3;}if(P1_6==0){Delay(20);while(P1_6==0);Delay(20);key_val=7;}if(P1_5==0){Delay(20);while(P1_5==0);Delay(20);key_val=11;}if(P1_4==0){Delay(20);while(P1_4==0);Delay(20);key_val=15;}P1=0xff;P1_0=0;if(P1_7==0){Delay(20);while(P1_7==0);Delay(20);key_val=4;}if(P1_6==0){Delay(20);while(P1_6==0);Delay(20);key_val=8;}if(P1_5==0){Delay(20);while(P1_5==0);Delay(20);key_val=12;}if(P1_4==0){Delay(20);while(P1_4==0);Delay(20);key_val=16;}return key_val;
}key.h
#include <REGX52.H>
#include "tim.h"unsigned char key_read(void);舵机部分
这部分的原理和代码原理可以直接在csdn上搜到很详细的讲解,笔者就不在原理讲解上献丑了,商家也会给参考代码。注释乱码想看的话从百度网盘下笔者的来看吧
sg90.c
#include "sg90.h"
//ÏëҪдÕâÑùµÄÒ»¸öº¯Êý
//ûÓзµ»ØÖµ ²ÎÊýÊǽǶȣ¬Ö´ÐÐÖ®ºó¶æ»úת¶¯µ½ÒªÇóµÄ½Ç¶È£¬
//´ó¸Å¹ý¸öÒ»ÃëÖ®ºó£¬»Øµ½Áã¶Èsbit motor_pin=P2^0;unsigned char pwm_count;
unsigned char pwm_vol;void Timer0_Isr(void) interrupt 1
{TL0 = (65526-100)%256;TH0 = (65526-100)/256;//100΢ÃîÒç³öÒ»´Îpwm_count++;if(pwm_count>=100)pwm_count=0;if(pwm_count<=pwm_vol)motor_pin=1;elsemotor_pin=0;
}void sg90_init(void)//³õʼ»¯£¬Èöæ»ú¸´Î»
{motor_pin=0;Timer0_Init();pwm_vol=4;Delay(600);
}void sg90_proc(unsigned char angle)//angle>=0&&angle<=180
{//pwm_vol=5 45//pwm_vol=10 90//pwm_vol=15 135//pwm_vol=20 180if(angle!=180)pwm_vol=angle/9+1;//ÓÐÎó²îËùÒÔ¼Ó¸ö1elsepwm_vol=18;//µ«Êǵ½180¶ÈµÄ»°²»Äܳ¬¹ý20£¬¾¹ýµ÷ÊÔ18£¬¸Õ¸ÕºÃDelay(1000);pwm_vol=4;//¸´Î»Delay(600);
}sg90.h
#include <REGX52.H>
#include "tim.h"void sg90_proc(unsigned char angle);
void sg90_init(void);tim.c
现在定时器配置好像都是直接用手动重装载来得方便。定时器1留给你们自己玩,目前是用不到的。
#include "tim.h"void Delay(unsigned int xms) //@12.000MHz 1ms
{unsigned char data i, j;while(xms--){i = 2;j = 239;do{while (--j);} while (--i);}
}void Timer1_Init(void) //1??@12.000MHz
{TMOD &= 0x0F; //???????TL1 = 0x18; //???????TH1 = 0xFC; //???????TF1 = 0; //??TF1??TR1 = 1; //???1????ET1 = 1; //?????1??EA = 1;
}void Timer0_Init(void) //100??@12.000MHz
{TMOD &= 0xF0; //???????TMOD |= 0x01;TL0 = (65526-100)%256;TH0 = (65526-100)/256;TF0 = 0; //??TF0??TR0 = 1; //???0????ET0 = 1; //?????0??EA = 1;
}tim.h
#include <REGX52.H>void Delay(unsigned int xms);
void Timer1_Init(void);
void Timer0_Init(void);main文件部分
main.c
//Í·ÎļþÓÃÕâ¸ö¾Í¹»ÓÃÁ˸оõ£¬µ½Ê±²»¹»ÓÃÔÙÓÃÄǸöf2k60s2µÄÍ·Îļþ
#include <REGX52.H>
#include "LCD1602.h"
#include "key.h"
#include "sg90.h"
#include "tim.h"//º¯ÊýÉùÃ÷
void Proc(void);
void Lcd_proc(void);//±äÁ¿
unsigned char key_num;//¼üÂëÖµ
unsigned long password;//ÃÜÂëÖµ
unsigned char count;//λÊý³¬¹ýÁùλ×Ô¶¯ÖØÐÂÊäÈë
unsigned char mode;//ģʽ±äÁ¿
bit bit1=0;//Ö÷º¯Êý
void main(void)
{LCD_Init();LCD_ShowString(1,1,"Smart Home");LCD_ShowString(2,1,"S13-go to Input");sg90_init();while(1){Lcd_proc();Proc();}
}void Proc(void)
{key_num=key_read();if(key_num==13)//´ú±í'*'¼ü{mode=1;}if(mode==1){if(key_num<10){if(count<5)//ÃÜÂë²»³¬¹ýÎåλ{password*=10;//×óÒÆpassword+=key_num%10;count++;}else{LCD_ShowNum(2,1,password,5);//³¬¹ýÎåλ֮ºó¾ÍÒ»Ö±ÏÔʾÊäÈëºÃµÄÃÜÂë}}LCD_ShowNum(2,1,password,5);if(key_num==14)//´ú±í¡°È·ÈÏ¡±¼ü{ if(count==5&&password==12345)//ÃÜÂë׼ȷ{bit1=1;//±ê־λÖÃ1£¬count=password=0;//¸´Î»mode=2;//2ģʽLCD_ShowNum(2,1,password,5);//Ë¢ÐÂÃÜÂëÏÔʾ}else if(count==5&&password!=12345)//ÃÜÂë´íÎó{count=password=0;mode=3;LCD_ShowNum(2,1,password,5);//Ë¢ÐÂÃÜÂëÏÔʾ}}}
}//дÕâ¸öº¯ÊýÊǸúÀ¶Çű±¸ÈüµÄģʽ±äÁ¿·¨½áºÏÆðÀ´£¬¸Ð¾õÏÔʾºÍÅж϶ÀÁ¢¿ªÀ´»¹ÊDZȽϺõÄ
void Lcd_proc(void)
{ switch(mode){case 0:LCD_ShowString(1,1,"Smart Home ");LCD_ShowString(2,1,"S13-go to Input");break;case 1:LCD_ShowString(1,1,"Input Password");LCD_ShowString(2,6," ");//°Ñ֮ǰÏÔʾµÄÄÚÈÝÇåÆÁbreak;case 2:if(bit1==1)//Èç¹ûÃÜÂë׼ȷ{LCD_ShowString(1,1,"Input Right! ");bit1=0;//¸´Î»sg90_proc(180);//¿ØÖƶæ»úת¶¯180¶È}LCD_ShowString(1,1,"Welcome Home! ");Delay(1000);//ÔÚÏÔʾ»¶Ó»Ø¼ÒÖ®ºó¾Í»Øµ½ÆÁ±£½çÃæģʽmode=0;break;case 3:LCD_ShowString(1,1,"Input Error! ");Delay(1000);//ÔÚÏÔʾ»¶Ó»Ø¼ÒÖ®ºó¾Í»Øµ½ÆÁ±£½çÃæģʽmode=0;break;}
}总结
简单说明一下实验现象:
1.上电之后默认处于屏保界面正常显示;
2.S13按下进入输密码模式,界面切换,第二行显示五个0表示五位密码;
3.1~9输入密码,五位输入完毕再输入无效,直到按下S14按键进行密码准确性判断;
4.如果密码正确,(密码默认为12345)LCD屏幕上先显示“Input Right!"再显示欢迎回家一秒后,回到屏保界面可以重新再次输入;
5.如果密码错误,也会在一秒之后返回屏保界面;
问题:舵机转动时会影响屏幕显示。
待开发的功能:
1.输入错误超过某个数值,让其处于屏保界面五秒后才能再次输入;
2.密码输入可以从屏幕左边开始输入,且不会显示五个0,而是输入一位就用一位数字覆盖空格,输入到哪一位,哪一位就有光标在闪烁;密码为六位;
3.屏保界面右上角显示温度值;
4.不同模式不同指示灯,正确指示灯常亮,错误闪烁;(蜂鸣器太吵了,虽说也可以);
5.加入其他模块;(ic卡,蓝牙。。。)
如若有代码更新,笔者会第一时间发出来。
相关文章:
51单片机简单控制180度舵机
代码: 链接:https://pan.baidu.com/s/1K9dg2NwRhy49db_O_hqv-g?pwd1234 提取码:1234 一、路线 我在了解这个舵机之前最像想看到的是一个完全的路径。 比如我想学习b站上那个智能门锁,那就得每个模块的基本代码都会才能结合各…...

PCL 常用小知识
文章目录 一、时间计算二、实现类似`pcl::PointCloud::Ptr`和`pcl::PointCloud`的两个类相互转换三、查找点云的x,y,z的极值四、知道需要保存点的索引,从原点云中拷贝点到新点云五、从点云里删除和添加点六、对点云进行全局或局部变换七、链接两个点云字段(两点云大小必须相…...
)
rbd块设备数据IO流程(client端)
一、rbd内核驱动写入流程 1)初始化 首先是rbd驱动的初始化工作:包括验证libceph的兼容性,分配内存,在sysfs中创建块设备控制文件、创建工作队列rbd_wq并调用INIT_WORK初始化它 module_init(rbd_init); static int __init rbd_i…...

数据仓库、数据中台、大数据平台之间的关系
数据行业经常会出现数据仓库、数据中台、大数据平台等概念,容易产生疑问,它们中间是相等,还是包含的关系? 数据中台和数据仓库概念的关系 数据中台概念是包含数据仓库的,数据仓库是数据中台中的一部分,包含…...

python写页面自动截图
from selenium import webdriver def take_screenshot(url, file_path):driver webdriver.Chrome()driver.get(url)driver.save_screenshot(file_path)driver.quit() if __name__ __main__:take_screenshot(http://baidu.com, D:\桌面\wang.png)要安装selenium还要安装google…...

【Qt 学习笔记】Qt常用控件 | 布局管理器 | 空白项Spacer
博客主页:Duck Bro 博客主页系列专栏:Qt 专栏关注博主,后期持续更新系列文章如果有错误感谢请大家批评指出,及时修改感谢大家点赞👍收藏⭐评论✍ Qt常用控件 | 布局管理器 | 添加空白Spacer 文章编号:Qt 学…...

es问题汇总--待完善
1. 查询某个索引库中数据总量 方式一: CountRequest 鄙人喜欢这种方式 public long getTotalNum(String indexName) throws IOException {CountRequest countRequest new CountRequest(indexName);// 如果需要,你可以在这里添加查询条件// countReques…...

python 线性回归模型
教材链接-3.2. 线性回归的从零开始实现 c实现 该博客仅用于记录一下自己的代码,可与c实现作为对照 from d2l import torch as d2l import torch import random # nn是神经网络的缩写 from torch import nn from torch.utils import data# 加载训练数据 # 加载训…...
pcl::transformPointCloud()用法及注意事项
函数用法 #include <pcl/common/transforms.h> pcl::transformPointCloud(const pcl::PointCloud<PointT> &cloud_in, pcl::PointCloud<PointT> &cloud_out, const Eigen::Matrix4f &transform) 其中cloud_in, cloud_out的类型为pcl::PointClo…...
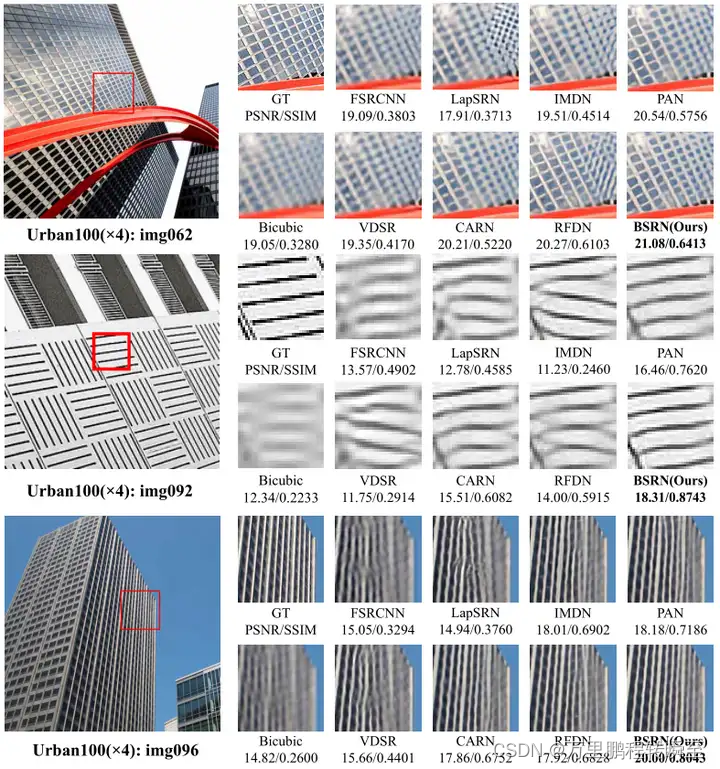
图像超分辨率重建相关概念、评价指标、数据集、模型
1、图像超分辨率概念 1.1 基本定义 超分辨率(Super-Resolution),简称超分(SR)。是指利用光学及其相关光学知识,根据已知图像信息恢复图像细节和其他数据信息的过程,简单来说就是增大图像的分辨…...

中移物联OneMO Cat.1模组推动联网POS规模应用
在第三方支付蓬勃发展和消费模式不断革新的时代背景下,新型联网POS终端以其智能化、便捷化的特点丰富人们生活便利度。在这一变革浪潮中,中移物联OneMO Cat.1模组ML307R凭借其卓越的性能和成本效益,成为推动联网POS规模应用的重要力量。 性能…...
二.常见算法--贪心算法
(1)单源点最短路径问题 问题描述: 给定一个图,任取其中一个节点为固定的起点,求从起点到任意节点的最短路径距离。 例如: 思路与关键点: 以下代码中涉及到宏INT_MAX,存在于<limits.h>中…...
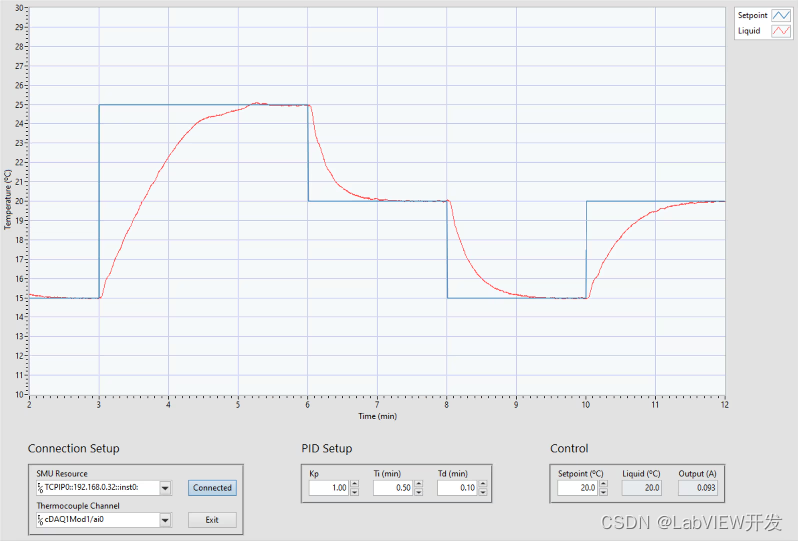
LabVIEW高温往复摩擦测试系统中PID控制
在LabVIEW开发高温往复摩擦测试系统中实现PID控制,需要注意以下几个方面: 1. 系统建模与参数确定 物理模型建立: 首先,需要了解被控对象的物理特性,包括热惯性、摩擦系数等。这些特性决定了系统的响应速度和稳定性。实验数据获取…...

配置yum源
以下是在 Linux 系统中配置新的 yum 源的一般步骤和命令示例(以 CentOS 系统为例): 备份原有 yum 源配置文件:mv /etc/yum.repos.d/CentOS-Base.repo /etc/yum.repos.d/CentOS-Base.repo.bak 创建新的 yum 源配置文件(…...
数据技术篇之数据同步)
深入理解数仓开发(二)数据技术篇之数据同步
1、数据同步 数据同步我们之前在数仓当中使用了多种工具,比如使用 Flume 将日志文件从服务器采集到 Kafka,再通过 Flume 将 Kafka 中的数据采集到 HDFS。使用 MaxWell 实时监听 MySQL 的 binlog 日志,并将采集到的变更日志(json 格…...
—— 类与对象(二))
C++语言学习(六)—— 类与对象(二)
目录 一、对象数组 二、对象指针 三、this 指针 四、类类型作为参数类型的三种形式 4.1 对象本身作为参数 4.2 对象指针作为参数 4.3 对象引用作为参数 五、静态成员 5.1 静态数据成员 5.2 静态成员函数 六、友元机制 6.1 友元函数 6.2 友元类 七、类的组合 八、…...

3d选择模型后不能旋转什么原因?怎么解决?---模大狮模型网
在3D建模和渲染的过程中,旋转模型是常见的操作。然而,有时在选择了模型后,却发现无法进行旋转,这可能会让许多用户感到困扰。本文将探讨3D选择模型后不能旋转的可能原因,并提供相应的解决方法。 一、3D选择模型后不能旋…...

从入门到精通:详解Linux环境基础开发工具的使用
前言 在这篇文章中,我将深入学习和理解Linux环境基础开发工具的使用。无论你是初学者还是有一定经验的开发者,相信这篇文章都会对你有所帮助。我们将详细讲解软件包管理器、编辑器、编译器、调试器、自动化构建工具以及版本控制工具的使用。 Linux软件…...
安装 node)
linux(centos 7)安装 node
linux(centos 7)安装 node 下载对应版本&安装解压配置环境变量使配置文件生效验证是否安装成功附加 目前node最新版本是 node-v22.0.0 官网下载地址:https://registry.npmmirror.com/binary.html?pathnode/latest-v22.x/node-v22.0.0-li…...

机器学习生产化实战:从Notebook到高可用模型服务
1. 项目概述:这不是一次“部署上线”,而是一场从实验室到产线的系统性迁移“From Notebook to Production: Running ML in the Real World (Part 4)”——这个标题本身就像一句暗号,老手一眼就懂:它不是在讲怎么调参、不是教你怎么…...

AzurLaneAutoScript:碧蓝航线自动化管理的完整解决方案
AzurLaneAutoScript:碧蓝航线自动化管理的完整解决方案 【免费下载链接】AzurLaneAutoScript Azur Lane bot (CN/EN/JP/TW) 碧蓝航线脚本 | 无缝委托科研,全自动大世界 项目地址: https://gitcode.com/gh_mirrors/az/AzurLaneAutoScript 还在为碧…...

2026央国企求职哪家强?TOP机构帮你稳住铁饭碗!
引言综述随着 2026 届超 1200 万毕业生涌入就业市场,央国企岗位竞争愈发激烈,岗位竞争比持续攀升。在这样的大环境下,求职者的核心需求集中在系统备考规划、精准岗位匹配以及高保障面试辅导上。本次测评旨在为求职者提供客观、专业的机构对比…...

AI写的小说与人类作者写的究竟有什么区别
AI写的小说与小说作者写的究竟有什么区别当2026年生成式AI的创作能力已经能做到日更百万字,当起点晋江上超过七成的网文作者都开始用AI辅助码字,当读者对着屏幕上几十万字的爽文分不清到底是人写的还是AI生成的——关于AI创作的讨论,早就从“…...

千问 LeetCode 2569. 更新数组后处理求和查询 Java实现
这道题的核心是高效维护nums1的区间反转操作,因为数据规模达到10^5,暴力反转会超时。需要用到线段树(区间更新区间查询)或BitSet来优化。下面给出Java实现,采用线段树 懒标记的方案:class Solution {publi…...

Rufus技术演进:从Windows 7告别到现代USB启动盘工具的重构之路
Rufus技术演进:从Windows 7告别到现代USB启动盘工具的重构之路 【免费下载链接】rufus The Reliable USB Formatting Utility 项目地址: https://gitcode.com/GitHub_Trending/ru/rufus 在开源工具生态中,技术栈的更新换代往往伴随着兼容性的艰难…...

FPGA 时序优化理论手册
定位:为时序优化手册中每一条规则、每一段代码背后的"为什么"提供物理直觉与数学原理 阅读方式:先读本手册建立理解,再回看时序优化手册对应的操作和代码 目录 第 1 部分 时序分析的物理基础第 1 章 数字电路中的时间:从晶体管到时序公式第 2 章 建立时间与保…...

深度拆解:TypeScript 大神把 .claude 目录开源,18 个 Skill 是给 AI 编程踩刹车的工程纪律
2026 年 4 月底,Total TypeScript 创始人、TypeScript 社区教父级人物 Matt Pocock 干了一件挺简单的事——把他个人 .claude 目录下的全部 Agent Skills 开源了。仓库叫 mattpocock/skills,副标题只有一句话:Skills for Real Engineers。一个…...

python旅游出行指南系统
目录同行可拿货,招校园代理 ,本人源头供货商项目概述核心功能技术实现代码示例(路线规划)扩展方向适用场景源码获取详细视频演示 :同行可合作点击我获取源码->获取博主联系方式->进我个人主页-->同行可拿货,招校园代理 ,本人源头供货…...

【Go Interface】接口诞生的意义
结论:接口(Interface)诞生的唯一意义:解耦接口的诞生,是为了解决软件工程里最致命的痛点:“上层代码”被“底层细节”死死绑架。没有接口时的痛苦假设你的 naga 模块现在要保存心跳数据。 第一周࿰…...