STM32入门笔记(03): ADC(SPL库函数版)(2)
A/D转换的常用技术有逐次逼近式、双积分式、并行式和跟踪比较式等。目前用的较多的是前3种。
A/D转换器的主要技术指标
转换时间
分辨率
例如,8位A/D转换器的数字输出量的变化范围为0~255,当输入电压的满刻度为5V时,数字量每变化一个数字所对应输入模拟电压的值为5V/255=19.6mV,其分辨能力为19.6mV
转换精度
转换精度指的是转换后所得的结果相对于实际值的准确度,可以用满量程的百分比这一相对误差来表示,如±0.05%
ADC应用设计深入讨论尽管STM32内部集成了12位ADC,但在实际应用中,要想真正实现12位精度且比较稳定的ADC并不简单,需要进一步从硬件、软件方面进行综合、细致地考虑。下面介绍一些在ADC应用设计中应该考虑的几个要点:
工作电压的稳定性
AVCC是提供给ADC工作的电源,如果AVCC不稳定,就会影响ADC的转换精度
参考电压的确定
ADC的参考电压应稍大于输入电压的最高值。ADC的参考电压VREF可以选择为AVCC,或外接参考电压源,外接的参考电压源应该稳定。
采样时钟的选择
ADC时钟频率最大为14MHz。如果STM32系统时钟频率为56MHz时,一般为4分频,ADC时钟频率为14MHz,如果系统时钟频率为72MHz时,一般为6分频,ADC时钟频率为12MHz。
ADC通道的输入信号频率带宽取决于ADC时钟频率。把ADC通道配置为55.5个周期,若ADCCLK的时钟频率配置为12MHz,则ADC采样的时间计算公式如下。Tcovn=采样时间+12.5个周期
其中:Tcovn为总转换时间,采样时间是根据每个通道的ADC_SampleTime的值来决定的。后面的12.5个周期是ADC转换时量化所需要的
固定的周期,ADC的一次转换所需要的时间是Tcovn=(55.5+12.5)×(1/12),大约是5.67μs。STM32的ADC输入阻抗典型值为50kΩ,为了保证测量准确,被测信号源的输出阻抗要尽可能低。
模拟噪声的抑制
器件外部和内部的数字电路会产生电磁干扰,并会影响模拟测量的精度。如果对ADC的转换精度要求很高,则可以采用以下的技术来降低噪声的影响。
使模拟信号的通路尽可能地短,模拟信号连线应从模拟地的布线盘上通过,并使它们尽可能远离高速开关数字信号线。
STM32的AVCC引脚应该通过LC网络与数字端电源VCC相连。
如果某些ADC引脚作为通用数字输出口,那么在ADC转换过程中,不要改变这些引脚的状态。
校准
ADC - 电压
要将 ADC (模数转换器) 的原始数值转换为电压值,通常需要进行以下步骤:
-
确定 ADC 的分辨率:
例如,对于 STM32F103C8T6,ADC 的分辨率是 12 位,因此其数值范围是 0 到 4095。 -
确定参考电压:
确定 ADC 的参考电压 Vref。在 STM32F103C8T6 中,默认情况下Vref 通常是 3.3V,但这取决于具体的硬件配置。 -
读取 ADC 值:
读取 ADC 转换后的数值,例如 ADC_value 。 -
使用公式转换为电压值:
使用公式计算实际的电压值:

其中 ( N ) 是 ADC 的分辨率。例如,对于 12 位 ADC,( N = 12 )。
具体步骤如下:
-
读取 ADC 值:
uint16_t ADC_value = HAL_ADC_GetValue(&hadc1); -
计算电压值:
float V_REF = 3.3; // 假设参考电压为 3.3V float voltage = (ADC_value / 4095.0) * V_REF;
以下是一个完整的例子,假设你使用 STM32 HAL 库:
#include "main.h"ADC_HandleTypeDef hadc1;void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_ADC1_Init(void);int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_ADC1_Init();HAL_ADC_Start(&hadc1);while (1){HAL_ADC_PollForConversion(&hadc1, HAL_MAX_DELAY);uint16_t ADC_value = HAL_ADC_GetValue(&hadc1);float V_REF = 3.3;float voltage = (ADC_value / 4095.0) * V_REF;// 在这里使用计算出的电压值}
}static void MX_ADC1_Init(void)
{ADC_ChannelConfTypeDef sConfig = {0};hadc1.Instance = ADC1;hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE;hadc1.Init.ContinuousConvMode = ENABLE;hadc1.Init.DiscontinuousConvMode = DISABLE;hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;hadc1.Init.NbrOfConversion = 1;if (HAL_ADC_Init(&hadc1) != HAL_OK){Error_Handler();}sConfig.Channel = ADC_CHANNEL_1;sConfig.Rank = ADC_REGULAR_RANK_1;sConfig.SamplingTime = ADC_SAMPLETIME_1CYCLE_5;if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK){Error_Handler();}
}static void MX_GPIO_Init(void)
{__HAL_RCC_GPIOA_CLK_ENABLE();
}void SystemClock_Config(void)
{// 时钟配置代码
}
这个例子展示了如何初始化 ADC1 并读取通道 1 (PA1) 的 ADC 值,然后将其转换为电压值。
如果将100V电压经过串联电阻分压,电阻R1为66K,R2为3K,这样如何通过ADC采样计算出电压?
将 100V 电压经过分压电路并通过 ADC 进行采样,计算出实际电压的方法如下:
-
分压电路公式:
分压电路的输出电压 Vout 可以用以下公式计算:

其中 Vin 是输入电压, R1 和 R2 是分压电阻。
-
具体分压电路参数:

注意:在实际应用中,必须确保 ( V_{out} ) 不超过 ADC 的参考电压(例如 3.3V)。在这种情况下,分压比使得 Vout 超过了 ADC 允许的最大电压,需要调整分压电阻以确保 Vout 在安全范围内 。
-
假设安全分压电阻:
-
通过 ADC 读取分压后的电压:

-
计算实际电压:
- 反向计算原始输入电压:

假设使用 STM32 和 HAL 库,代码示例如下:
#include "main.h"ADC_HandleTypeDef hadc1;void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_ADC1_Init(void);int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_ADC1_Init();HAL_ADC_Start(&hadc1);while (1){HAL_ADC_PollForConversion(&hadc1, HAL_MAX_DELAY);uint16_t ADC_value = HAL_ADC_GetValue(&hadc1);float V_REF = 3.3;float V_out = (ADC_value / 4095.0) * V_REF;float R1 = 96000.0; // 96KΩfloat R2 = 3000.0; // 3KΩfloat V_in = V_out * (R1 + R2) / R2;// 使用计算出的 V_in}
}static void MX_ADC1_Init(void)
{ADC_ChannelConfTypeDef sConfig = {0};hadc1.Instance = ADC1;hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE;hadc1.Init.ContinuousConvMode = ENABLE;hadc1.Init.DiscontinuousConvMode = DISABLE;hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;hadc1.Init.NbrOfConversion = 1;if (HAL_ADC_Init(&hadc1) != HAL_OK){Error_Handler();}sConfig.Channel = ADC_CHANNEL_1;sConfig.Rank = ADC_REGULAR_RANK_1;sConfig.SamplingTime = ADC_SAMPLETIME_1CYCLE_5;if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK){Error_Handler();}
}static void MX_GPIO_Init(void)
{__HAL_RCC_GPIOA_CLK_ENABLE();
}void SystemClock_Config(void)
{// 时钟配置代码
}
这个代码展示了如何读取 ADC 值并将其转换为实际电压,再通过分压公式计算出原始输入电压。注意在实际电路中,请确保所有电压和电阻值在安全范围内,以防止损坏设备。
ADC 软件滤波
ADC 读取到的值有抖动是常见现象,可以通过以下几种方法来进行滤波:
- 平均值滤波:读取多次 ADC 值,取平均值,可以平滑抖动。
- 中值滤波:读取多次 ADC 值,取中间值,可以去除突发噪声。
- 低通滤波器:通过数字滤波算法,平滑高频噪声。
以下是每种方法的具体实现:
1. 平均值滤波
#define NUM_SAMPLES 10uint16_t Read_ADC_Averaged(ADC_HandleTypeDef* hadc)
{uint32_t sum = 0;for (int i = 0; i < NUM_SAMPLES; i++){HAL_ADC_Start(hadc);HAL_ADC_PollForConversion(hadc, HAL_MAX_DELAY);sum += HAL_ADC_GetValue(hadc);}return sum / NUM_SAMPLES;
}
2. 中值滤波
#define NUM_SAMPLES 9uint16_t Read_ADC_Median(ADC_HandleTypeDef* hadc)
{uint16_t samples[NUM_SAMPLES];for (int i = 0; i < NUM_SAMPLES; i++){HAL_ADC_Start(hadc);HAL_ADC_PollForConversion(hadc, HAL_MAX_DELAY);samples[i] = HAL_ADC_GetValue(hadc);}// 排序for (int i = 0; i < NUM_SAMPLES - 1; i++){for (int j = 0; j < NUM_SAMPLES - i - 1; j++){if (samples[j] > samples[j + 1]){uint16_t temp = samples[j];samples[j] = samples[j + 1];samples[j + 1] = temp;}}}return samples[NUM_SAMPLES / 2];
}
3. 低通滤波器 (IIR 滤波器)
#define ALPHA 0.1 // 滤波系数,取值范围为 0 到 1float Read_ADC_LowPass(ADC_HandleTypeDef* hadc, float previous_filtered_value)
{HAL_ADC_Start(hadc);HAL_ADC_PollForConversion(hadc, HAL_MAX_DELAY);uint16_t raw_value = HAL_ADC_GetValue(hadc);float current_filtered_value = ALPHA * raw_value + (1 - ALPHA) * previous_filtered_value;return current_filtered_value;
}
综合代码示例
将这些滤波方法整合到你的代码中,可以如下:
#include "main.h"ADC_HandleTypeDef hadc1;void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_ADC1_Init(void);#define NUM_SAMPLES 10
#define ALPHA 0.1float previous_filtered_value = 0;uint16_t Read_ADC_Averaged(ADC_HandleTypeDef* hadc)
{uint32_t sum = 0;for (int i = 0; i < NUM_SAMPLES; i++){HAL_ADC_Start(hadc);HAL_ADC_PollForConversion(hadc, HAL_MAX_DELAY);sum += HAL_ADC_GetValue(hadc);}return sum / NUM_SAMPLES;
}uint16_t Read_ADC_Median(ADC_HandleTypeDef* hadc)
{uint16_t samples[NUM_SAMPLES];for (int i = 0; i < NUM_SAMPLES; i++){HAL_ADC_Start(hadc);HAL_ADC_PollForConversion(hadc, HAL_MAX_DELAY);samples[i] = HAL_ADC_GetValue(hadc);}for (int i = 0; i < NUM_SAMPLES - 1; i++){for (int j = 0; j < NUM_SAMPLES - i - 1; j++){if (samples[j] > samples[j + 1]){uint16_t temp = samples[j];samples[j] = samples[j + 1];samples[j + 1] = temp;}}}return samples[NUM_SAMPLES / 2];
}float Read_ADC_LowPass(ADC_HandleTypeDef* hadc, float previous_filtered_value)
{HAL_ADC_Start(hadc);HAL_ADC_PollForConversion(hadc, HAL_MAX_DELAY);uint16_t raw_value = HAL_ADC_GetValue(hadc);float current_filtered_value = ALPHA * raw_value + (1 - ALPHA) * previous_filtered_value;return current_filtered_value;
}int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_ADC1_Init();HAL_ADC_Start(&hadc1);while (1){uint16_t ADC_value_averaged = Read_ADC_Averaged(&hadc1);uint16_t ADC_value_median = Read_ADC_Median(&hadc1);previous_filtered_value = Read_ADC_LowPass(&hadc1, previous_filtered_value);float V_REF = 3.3;float V_out_averaged = (ADC_value_averaged / 4095.0) * V_REF;float V_out_median = (ADC_value_median / 4095.0) * V_REF;float V_out_lowpass = (previous_filtered_value / 4095.0) * V_REF;float R1 = 96000.0;float R2 = 3000.0;float V_in_averaged = V_out_averaged * (R1 + R2) / R2;float V_in_median = V_out_median * (R1 + R2) / R2;float V_in_lowpass = V_out_lowpass * (R1 + R2) / R2;// 使用计算出的 V_in}
}static void MX_ADC1_Init(void)
{ADC_ChannelConfTypeDef sConfig = {0};hadc1.Instance = ADC1;hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE;hadc1.Init.ContinuousConvMode = ENABLE;hadc1.Init.DiscontinuousConvMode = DISABLE;hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;hadc1.Init.NbrOfConversion = 1;if (HAL_ADC_Init(&hadc1) != HAL_OK){Error_Handler();}sConfig.Channel = ADC_CHANNEL_1;sConfig.Rank = ADC_REGULAR_RANK_1;sConfig.SamplingTime = ADC_SAMPLETIME_1CYCLE_5;if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK){Error_Handler();}
}static void MX_GPIO_Init(void)
{__HAL_RCC_GPIOA_CLK_ENABLE();
}void SystemClock_Config(void)
{// 时钟配置代码
}
这个代码示例展示了如何分别使用平均值滤波、中值滤波和低通滤波来处理 ADC 抖动。根据实际需求选择合适的滤波方法,可以有效减小 ADC 读数的抖动。
低通滤波器(IIR)
低通滤波器是一种常用的信号处理技术,用于平滑信号并去除高频噪声。最常见的低通滤波器之一是指数加权移动平均滤波器(IIR 低通滤波器)。
原理
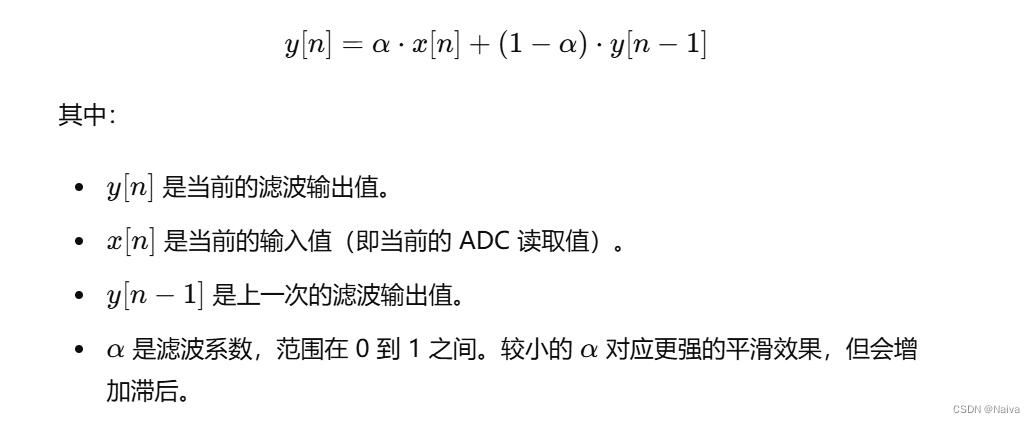
指数加权移动平均滤波器的基本原理是对当前采样值和先前的滤波值进行加权平均。公式如下:
具体实现步骤
-
定义变量:
- 滤波系数 (\alpha)
- 上一次的滤波输出值(初始为 0)
-
读取 ADC 值:
- 使用 HAL 库读取 ADC 值
-
计算滤波值:
- 应用低通滤波公式
-
重复进行:
- 在循环中持续读取 ADC 值并计算滤波值
代码实现
以下是一个详细的 C 语言代码示例,使用 STM32 HAL 库实现低通滤波器:
#include "main.h"ADC_HandleTypeDef hadc1;void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_ADC1_Init(void);#define ALPHA 0.1 // 滤波系数,范围在 0 到 1 之间float previous_filtered_value = 0; // 上一次的滤波输出值float Read_ADC_LowPass(ADC_HandleTypeDef* hadc, float previous_filtered_value)
{HAL_ADC_Start(hadc);HAL_ADC_PollForConversion(hadc, HAL_MAX_DELAY);uint16_t raw_value = HAL_ADC_GetValue(hadc);float current_filtered_value = ALPHA * raw_value + (1 - ALPHA) * previous_filtered_value;return current_filtered_value;
}int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_ADC1_Init();HAL_ADC_Start(&hadc1);while (1){previous_filtered_value = Read_ADC_LowPass(&hadc1, previous_filtered_value);float V_REF = 3.3;float V_out = (previous_filtered_value / 4095.0) * V_REF;float R1 = 96000.0; // 96KΩfloat R2 = 3000.0; // 3KΩfloat V_in = V_out * (R1 + R2) / R2;// 在这里使用计算出的 V_in}
}static void MX_ADC1_Init(void)
{ADC_ChannelConfTypeDef sConfig = {0};hadc1.Instance = ADC1;hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE;hadc1.Init.ContinuousConvMode = ENABLE;hadc1.Init.DiscontinuousConvMode = DISABLE;hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;hadc1.Init.NbrOfConversion = 1;if (HAL_ADC_Init(&hadc1) != HAL_OK){Error_Handler();}sConfig.Channel = ADC_CHANNEL_1;sConfig.Rank = ADC_REGULAR_RANK_1;sConfig.SamplingTime = ADC_SAMPLETIME_1CYCLE_5;if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK){Error_Handler();}
}static void MX_GPIO_Init(void)
{__HAL_RCC_GPIOA_CLK_ENABLE();
}void SystemClock_Config(void)
{// 时钟配置代码
}
详细说明
-
定义滤波系数和变量:
#define ALPHA 0.1定义滤波系数,决定新输入值的权重。float previous_filtered_value = 0;初始化上一次的滤波输出值。
-
读取 ADC 值并应用低通滤波公式:
HAL_ADC_Start(hadc);启动 ADC。HAL_ADC_PollForConversion(hadc, HAL_MAX_DELAY);等待 ADC 转换完成。uint16_t raw_value = HAL_ADC_GetValue(hadc);获取 ADC 读取值。float current_filtered_value = ALPHA * raw_value + (1 - ALPHA) * previous_filtered_value;应用低通滤波公式计算当前滤波值。
-
在主循环中持续滤波:
previous_filtered_value = Read_ADC_LowPass(&hadc1, previous_filtered_value);调用滤波函数,更新滤波值。
-
计算和使用滤波后的电压值:
float V_out = (previous_filtered_value / 4095.0) * V_REF;计算分压电路的输出电压。float V_in = V_out * (R1 + R2) / R2;反向计算原始输入电压。
通过这个实现,可以有效地平滑 ADC 读取值的抖动,提高测量的稳定性。
ADC - 电流
为了通过 ADC 采集电流,并根据 ADC 值计算出电流值,需要以下几个步骤:
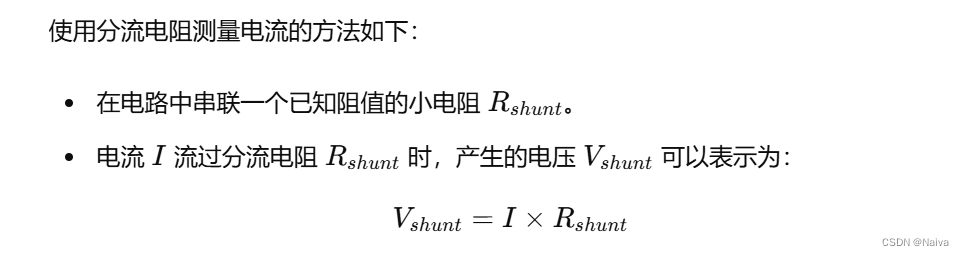
- 选择电流传感器:通常使用分流电阻 (shunt resistor) 或霍尔效应电流传感器。
- 采样电压:通过分流电阻或传感器将电流转换为电压,然后用 ADC 采样该电压。
- 计算电流:根据电压值和已知的分流电阻或传感器的特性,计算出实际电流。
以下是详细步骤:
1. 分流电阻测量电流
使用分流电阻测量电流的方法如下:
2. ADC 采样电压
使用 ADC 采样分流电阻上的电压。假设 ADC 的参考电压 ( V_{REF} ) 为 3.3V,分辨率为 12 位 (0 到 4095)。
3. 计算电流
根据 ADC 采样到的电压值,计算实际电流:
![[
I = \frac{V_{shunt}}{R_{shunt}} = \frac{ADC_{value} \times V_{REF}}{4095 \times R_{shunt}}
]](https://img-blog.csdnimg.cn/direct/bdbcb00df8d942e6abc84b70d5966b5c.png)
代码实现
以下是一个详细的 C 语言代码示例,使用 STM32 HAL 库通过分流电阻测量电流:
#include "main.h"ADC_HandleTypeDef hadc1;void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_ADC1_Init(void);#define R_SHUNT 0.01 // 分流电阻值 (单位: 欧姆)
#define V_REF 3.3 // ADC 参考电压 (单位: 伏特)
#define ADC_RESOLUTION 4095.0 // ADC 分辨率 (12 位)float Read_Current(ADC_HandleTypeDef* hadc, float R_shunt)
{HAL_ADC_Start(hadc);HAL_ADC_PollForConversion(hadc, HAL_MAX_DELAY);uint16_t ADC_value = HAL_ADC_GetValue(hadc);float V_shunt = (ADC_value / ADC_RESOLUTION) * V_REF;float current = V_shunt / R_shunt;return current;
}int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_ADC1_Init();HAL_ADC_Start(&hadc1);while (1){float current = Read_Current(&hadc1, R_SHUNT);// 在这里使用计算出的电流值 current}
}static void MX_ADC1_Init(void)
{ADC_ChannelConfTypeDef sConfig = {0};hadc1.Instance = ADC1;hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE;hadc1.Init.ContinuousConvMode = ENABLE;hadc1.Init.DiscontinuousConvMode = DISABLE;hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;hadc1.Init.NbrOfConversion = 1;if (HAL_ADC_Init(&hadc1) != HAL_OK){Error_Handler();}sConfig.Channel = ADC_CHANNEL_1;sConfig.Rank = ADC_REGULAR_RANK_1;sConfig.SamplingTime = ADC_SAMPLETIME_1CYCLE_5;if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK){Error_Handler();}
}static void MX_GPIO_Init(void)
{__HAL_RCC_GPIOA_CLK_ENABLE();
}void SystemClock_Config(void)
{// 时钟配置代码
}
详细说明
-
定义分流电阻和 ADC 参数:
#define R_SHUNT 0.01定义分流电阻值,单位为欧姆。#define V_REF 3.3定义 ADC 参考电压,单位为伏特。#define ADC_RESOLUTION 4095.0定义 ADC 的分辨率。
-
读取 ADC 值并计算电流:
HAL_ADC_Start(hadc);启动 ADC。HAL_ADC_PollForConversion(hadc, HAL_MAX_DELAY);等待 ADC 转换完成。uint16_t ADC_value = HAL_ADC_GetValue(hadc);获取 ADC 读取值。float V_shunt = (ADC_value / ADC_RESOLUTION) * V_REF;计算分流电阻上的电压。float current = V_shunt / R_shunt;计算实际电流。
-
在主循环中持续测量电流:
float current = Read_Current(&hadc1, R_SHUNT);调用测量电流的函数,获取当前电流值。
通过这个实现,可以有效地使用 ADC 采集电流,并根据 ADC 值计算出实际电流值。
ADC - 温度
使用查表法计算温度是一种常见且简单的方法,特别适合在微控制器上实现,因为它不需要复杂的数学运算。以下是具体步骤和实现方法:
步骤概述
- 建立查表:根据 NTC 热敏电阻的特性曲线,创建一个电阻值与温度对应的查表(数组)。
- 读取 ADC 值:使用 ADC 读取分压电路的电压。
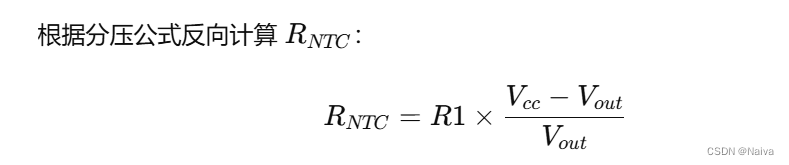
- 计算 NTC 电阻值:根据分压公式计算 NTC 热敏电阻的电阻值。
- 查找温度:在查表中找到对应的温度值。
具体步骤
1. 建立查表
NTC 热敏电阻的电阻值随温度变化。可以根据热敏电阻的数据手册或特性曲线建立一个电阻值与温度对应的查表。例如:
const uint32_t resistance_table[] = {3380, 3300, 3220, /* ... */ 100}; // 阻值 (单位: 欧姆)
const float temperature_table[] = {0, 1, 2, /* ... */ 100}; // 温度值 (单位: 摄氏度)
const int table_size = sizeof(resistance_table) / sizeof(resistance_table[0]);
2. 使用 ADC 读取电压
使用 STM32 的 ADC 采样 Vout。
3. 计算 NTC 电阻值
4. 查找温度
在查表中找到对应的温度值,可以使用线性插值法提高精度。
代码实现
以下是一个详细的 C 语言代码示例,使用 STM32 HAL 库实现以上步骤:
#include "main.h"
#include <stdio.h>ADC_HandleTypeDef hadc1;void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_ADC1_Init(void);#define R1 10000 // 固定电阻值 (单位: 欧姆)
#define V_REF 3.3 // ADC 参考电压 (单位: 伏特)
#define ADC_RESOLUTION 4095.0 // ADC 分辨率 (12 位)// 查表 (电阻值单位: 欧姆, 温度单位: 摄氏度)
const uint32_t resistance_table[] = {3380, 3300, 3220, /* ... */ 100};
const float temperature_table[] = {0, 1, 2, /* ... */ 100};
const int table_size = sizeof(resistance_table) / sizeof(resistance_table[0]);float Read_NTC_Temperature(ADC_HandleTypeDef* hadc)
{HAL_ADC_Start(hadc);HAL_ADC_PollForConversion(hadc, HAL_MAX_DELAY);uint16_t ADC_value = HAL_ADC_GetValue(hadc);float Vout = (ADC_value / ADC_RESOLUTION) * V_REF;float R_ntc = R1 * (V_REF / Vout - 1);// 查表法找到温度值for (int i = 0; i < table_size - 1; i++){if (R_ntc >= resistance_table[i+1] && R_ntc <= resistance_table[i]){// 线性插值计算温度float R1 = resistance_table[i];float R2 = resistance_table[i+1];float T1 = temperature_table[i];float T2 = temperature_table[i+1];float temperature = T1 + (R_ntc - R1) * (T2 - T1) / (R2 - R1);return temperature;}}// 如果未找到匹配的电阻值,返回一个默认值return -273.15; // 表示错误
}int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_ADC1_Init();HAL_ADC_Start(&hadc1);while (1){float temperature = Read_NTC_Temperature(&hadc1);// 使用计算出的温度值 temperature}
}static void MX_ADC1_Init(void)
{ADC_ChannelConfTypeDef sConfig = {0};hadc1.Instance = ADC1;hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE;hadc1.Init.ContinuousConvMode = ENABLE;hadc1.Init.DiscontinuousConvMode = DISABLE;hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;hadc1.Init.NbrOfConversion = 1;if (HAL_ADC_Init(&hadc1) != HAL_OK){Error_Handler();}sConfig.Channel = ADC_CHANNEL_1;sConfig.Rank = ADC_REGULAR_RANK_1;sConfig.SamplingTime = ADC_SAMPLETIME_1CYCLE_5;if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK){Error_Handler();}
}static void MX_GPIO_Init(void)
{__HAL_RCC_GPIOA_CLK_ENABLE();
}void SystemClock_Config(void)
{// 时钟配置代码
}
详细说明
-
定义常量和查表:
#define R1 10000定义固定电阻 ( R1 ) 的值,单位为欧姆。#define V_REF 3.3定义 ADC 参考电压,单位为伏特。#define ADC_RESOLUTION 4095.0定义 ADC 的分辨率。const uint32_t resistance_table[]和const float temperature_table[]分别定义电阻值和温度值的查表。const int table_size定义查表的大小。
-
读取 ADC 值并计算电阻和温度:
HAL_ADC_Start(hadc);启动 ADC。HAL_ADC_PollForConversion(hadc, HAL_MAX_DELAY);等待 ADC 转换完成。uint16_t ADC_value = HAL_ADC_GetValue(hadc);获取 ADC 读取值。float Vout = (ADC_value / ADC_RESOLUTION) * V_REF;计算分压电路的输出电压。float R_ntc = R1 * (V_REF / Vout - 1);计算 NTC 热敏电阻的电阻值。
-
查找温度值:
- 遍历查表,通过线性插值计算电阻值与温度值之间的关系,找到对应的温度。
通过这个实现,可以有效地使用 ADC 采集 NTC 热敏电阻的电阻值,并通过查表法将其转换为温度。线性插值可以提高温度计算的精度。查表数据可以根据具体的 NTC 热敏电阻特性曲线来建立。
相关文章:
STM32入门笔记(03): ADC(SPL库函数版)(2)
A/D转换的常用技术有逐次逼近式、双积分式、并行式和跟踪比较式等。目前用的较多的是前3种。 A/D转换器的主要技术指标 转换时间 分辨率 例如,8位A/D转换器的数字输出量的变化范围为0~255,当输入电压的满刻度为5V时,数字量每变化…...

2024年7月2日 (周二) 叶子游戏新闻
老板键工具来唤去: 它可以为常用程序自定义快捷键,实现一键唤起、一键隐藏的 Windows 工具,并且支持窗口动态绑定快捷键(无需设置自动实现)。 卸载工具 HiBitUninstaller: Windows上的软件卸载工具 经典名作30周年新篇《恐怖惊魂夜…...

如何使用Spring Boot Profiles进行环境配置管理
如何使用Spring Boot Profiles进行环境配置管理 大家好,我是免费搭建查券返利机器人省钱赚佣金就用微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿!今天我们将深入探讨如何利用Spring Boot Profiles来管理不同环境…...
)
Java错题归纳(二)
1、若有如下接口A的定义,下列哪些类下确实现了该接口:C interface A { void method1(int i); void method2(int j); } A class B implements A{ void method1( ) { } void method2( ) { } } B class B implements A { void method1(int i ) { }…...

Grafana面试题精选和参考答案
目录 Grafana是什么以及它的主要应用场景 Grafana支持的数据源 Grafana的体系结构及主要组件 Grafana如何实现数据的可视化和监控 Grafana支持的图表类型 如何在Grafana中创建和编辑仪表盘 Grafana的查询编辑器功能 Grafana支持的认证方式 Grafana的性能调优建议 Gra…...
Node版本管理工具 fnm 安装使用
fnm 是一个基于 Rust 开发的 Node 版本管理工具,它的目标是提供一个快速、简单且可靠的方式来管理 Node.js 的不同版本。同时,它是跨平台的,支持 macOS、Linux、Windows。🚀 Fast and simple Node.js version manager, built in R…...

vector模拟实现【C++】
文章目录 全部的实现代码放在了文章末尾准备工作包含头文件定义命名空间和类类的成员变量 迭代器迭代器获取函数 构造函数默认构造使用n个值构造迭代器区间构造解决迭代器区间构造和用n个值构造的冲突拷贝构造 析构函数swap【交换函数】赋值运算符重载emptysize和capacityopera…...

《每天5分钟用Flask搭建一个管理系统》第11章:测试与部署
第11章:测试与部署 11.1 测试的重要性 测试是确保应用质量和可靠性的关键步骤。它帮助开发者发现和修复错误,验证功能按预期工作。 11.2 Flask测试客户端的使用 Flask提供了一个测试客户端,可以在开发过程中模拟请求并测试应用的响应。 …...

Landsat数据从Collection1更改为Collection2
目录 问题解决 问题 需要注意!您使用的是废弃的陆地卫星数据集。为确保功能持续,请在2024年7月1日前更新。 在使用一些以前的代码时会遇到报错,因为代码里面用的是老的数据集 解决 对于地表反射率SR,需要在name中,将C01换为C02&…...

《每天5分钟用Flask搭建一个管理系统》第12章:安全性
第12章:安全性 12.1 Web应用的安全威胁 Web应用面临的安全威胁包括但不限于跨站脚本攻击(XSS)、SQL注入、跨站请求伪造(CSRF)、不安全的直接对象引用(IDOR)等。 12.2 Flask-Talisman扩展的使…...
Unity之创建与导出PDF
内容将会持续更新,有错误的地方欢迎指正,谢谢! Unity之创建与导出PDF TechX 坚持将创新的科技带给世界! 拥有更好的学习体验 —— 不断努力,不断进步,不断探索 TechX —— 心探索、心进取! 助力快速…...

【Android面试八股文】优化View层次过深问题,选择哪个布局比较好?
优化深层次View层次结构的问题,选择合适的布局方式是至关重要的。以下是几点建议: 使用ConstraintLayout:ConstraintLayout是Android开发中推荐的布局,能够有效减少嵌套,提高布局性能。相比RelativeLayout,…...

什么是带有 API 网关的代理?
带有 API 网关的代理服务显著提升了用户体验和性能。特别是对于那些使用需要频繁创建和轮换代理的工具的用户来说,使用 API 可以节省大量时间并提高效率。 了解 API API,即应用程序编程接口,是服务提供商和用户之间的连接网关。通过 API 连接…...
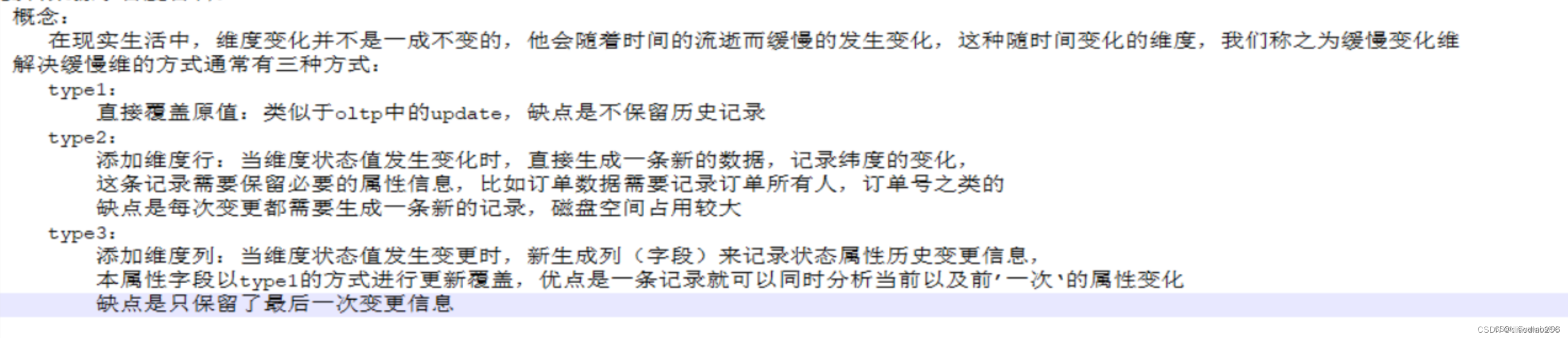
sql拉链表
1、定义:维护历史状态以及最新数据的一种表 2、使用场景 1、有一些表的数据量很大,比如一张用户表,大约1亿条记录,50个字段,这种表 2.表中的部分字段会被update更新操作,如用户联系方式,产品的…...

STM32CubeMX实现矩阵按键(HAL库实现)
功能描述: 实现矩阵按键验证,将矩阵按键的按键值,通过串口显示,便于后面使用。 实物图 原理图: 编程原理: 原理很简单,就是通过循环设置引脚为低电平,另外引脚扫描读取电平值&…...

mmdetection3D指定版本安装指南
1. 下载指定版本号 选择指定版本号下载mmdetection3d的源码,如这里选择的是0.17.2版本 git clone https://github.com/open-mmlab/mmdetection3d.git -b v0.17.22. 安装 cd mmdetection3d安装依赖库 pip install -r requirment.txt编译安装 pip install -v e .…...

SQLMap工具详解与SQL注入防范
SQLMap工具详解与SQL注入防范 大家好,我是微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿!今天我们将深入探讨SQLMap工具的详细使用方法以及如何防范SQL注入攻击。 SQL注入简介 SQL注入是一种常见的安全漏洞&am…...

如何在Java中实现自定义数据结构:从头开始
如何在Java中实现自定义数据结构:从头开始 大家好,我是免费搭建查券返利机器人省钱赚佣金就用微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿!今天我们将探讨如何在Java中实现自定义数据结构ÿ…...
【机器学习】在【Pycharm】中的应用:【线性回归模型】进行【房价预测】
专栏:机器学习笔记 pycharm专业版免费激活教程见资源,私信我给你发 python相关库的安装:pandas,numpy,matplotlib,statsmodels 1. 引言 线性回归(Linear Regression)是一种常见的统计方法和机器学习算法&a…...
如何在 Linux 中后台运行进程?
一、后台进程 在后台运行进程是 Linux 系统中的常见要求。在后台运行进程允许您在进程独立运行时继续使用终端或执行其他命令。这对于长时间运行的任务或当您想要同时执行多个命令时特别有用。 在深入研究各种方法之前,让我们先了解一下什么是后台进程。在 Linux 中…...
 显卡排行榜 天梯图)
top50 BF16算力(TFLOPS) 显卡排行榜 天梯图
排名显卡型号BF16算力(TFLOPS)售价(元)单TFLOPS价格(元)1B200(SXM)45002200000488.892H200(SXM)19801200000606.063MI300X1307750000573.834H100 SXM519501100000564.105RTX PRO 6000 Blackwell1150780000678.266H100 PCIe 80GB1560850000544.877RTX 50906803400050.008A100 80…...

全链路压测实战:双十一级别的流量,我是这样扛住的
作为一名在质量保障领域摸爬滚打多年的测试工程师,我深知传统的单接口压测在如今分布式架构下的无力感。当业务流量达到双十一这种脉冲式、高并发的级别时,任何一个非核心链路上的“短板”都可能引发系统性的雪崩。全链路压测不再是选择题,而…...
:执行计划教我做事)
开发转兼职DBA(二):执行计划教我做事
开发转兼职DBA(二):执行计划教我做事 查询慢了不知道为什么,加了索引还是慢,复合索引怎么建,执行计划怎么看——这些不是DBA的专利,是每个写SQL的开发者迟早要面对的事。 文章目录 开发转兼职DB…...

【DeepSeek架构评审功能深度解密】:20年架构师亲授3大避坑指南与5步落地 checklist
更多请点击: https://kaifayun.com 第一章:DeepSeek架构评审功能全景概览 DeepSeek架构评审功能是一套面向大模型系统设计与工程落地的自动化分析框架,聚焦于模型结构合理性、计算图优化潜力、内存访问模式、算子兼容性及部署约束等多维度评…...

AhMyth位置跟踪:GPS定位与地理围栏技术深度解析
AhMyth位置跟踪:GPS定位与地理围栏技术深度解析 【免费下载链接】AhMyth Cross-Platform Android Remote Administration Tool | The only maintained version of AhMyth on github | A revival of the original repository at https://GitHub.com/AhMyth/AhMyth-An…...

基于LSTM自编码器的家用电器功耗异常检测系统构建指南
1. 项目概述:从能耗洞察到智能干预我们每天都在和各种家用电器打交道,从清晨唤醒你的咖啡机,到深夜还在默默工作的路由器。你有没有想过,这些看似微不足道的设备,其背后隐藏的能耗模式,其实大有文章&#x…...

Awoo Installer:让Switch游戏安装变得简单高效的终极解决方案
Awoo Installer:让Switch游戏安装变得简单高效的终极解决方案 【免费下载链接】Awoo-Installer A No-Bullshit NSP, NSZ, XCI, and XCZ Installer for Nintendo Switch 项目地址: https://gitcode.com/gh_mirrors/aw/Awoo-Installer 厌倦了繁琐的Switch游戏安…...

【Midjourney霓虹效果终极指南】:20年AI视觉工程师亲授5大参数组合+3类光源建模公式,97%新手一周内复刻赛博朋克海报
更多请点击: https://kaifayun.com 第一章:霓虹美学的视觉原理与Midjourney适配性解析 霓虹美学源于20世纪都市夜景中的荧光灯管、电子广告与赛博朋克文化,其核心视觉特征包括高饱和度冷暖对比、边缘辉光(glow)、深色…...

PlayAI实时翻译如何重构跨国协作效率?揭秘2024企业级应用的3个关键转折点
更多请点击: https://codechina.net 第一章:PlayAI实时翻译如何重构跨国协作效率?揭秘2024企业级应用的3个关键转折点 在远程办公常态化与全球供应链深度耦合的背景下,PlayAI 实时翻译已从辅助工具跃升为协同基础设施。其核心突破…...

OpenTK 3.3.3实现3D旋转立方体:C# OpenGL入门实战
1. 为什么一个旋转立方体是3D图形编程真正的“Hello World” 很多人第一次接触OpenGL或现代图形API时,总想直接上手做粒子系统、PBR渲染或者实时阴影——结果卡在顶点缓冲对象(VBO)绑定失败、着色器编译报错、甚至窗口根本没显示出来。我带过…...