自动泊车系统中的YOLOv8 pose关键点车位线检测
自动泊车系统中的YOLOv8关键点车位线检测技术解析

引言
随着智能驾驶技术的快速发展,自动泊车功能成为了现代汽车的重要组成部分。它不仅能够提高驾驶的安全性,还能在一定程度上解决城市停车难的问题。在自动泊车系统中,准确识别停车位的位置是实现精准泊车的关键。近年来,深度学习技术在图像识别领域的应用为这一挑战提供了新的解决方案。YOLO(You Only Look Once)系列算法因其高效的实时检测能力而受到广泛关注。本文将探讨基于YOLOv8的关键点车位线检测方法,从数据标注、模型训练到最终的推理过程进行全面解析。

数据准备与标注
- 数据收集:首先,需要收集大量包含不同场景下的停车位图片。这些图片应该覆盖多种环境条件,如白天、夜晚、晴天、雨天等,以确保模型具有良好的泛化能力。此外,还应包括不同类型的停车位,如平行式、垂直式和斜向式停车位。
import os
import json# import cv2
# from imgviz.external.transformations import angle_between_vectors# 指定包含JSON文件的目录
directory = 'data_js'
jpg="data_js/"
# 创建一个空列表来保存所有的点
all_points = []
# index={"occ":0,"empty":1}
index={"parkset":0}
# 遍历指定目录下的所有文件
for filename in os.listdir(directory):name=filename.split(".json")[0]+".jpg"txt_name=filename.split(".json")[0]+".txt"jpg_path=jpg+nameif filename.endswith('.json'):filepath = os.path.join(directory, filename)# 读取JSON文件with open(filepath, 'r') as f:data = json.load(f)# 遍历每个shape对象all=[]cons=2for shape in data.get('shapes', []):points = shape.get('points', [])label = shape.get('label', None)print("label0:",label)first=index[label]print("label:",first)# 如果有points字段,则添加到all_points列表中box = [min(points[1][0], points[2][0],points[0][0], points[3][0]), min(points[0][1], points[3][1],points[1][1], points[2][1]),max(points[1][0], points[2][0],points[0][0], points[3][0]), max(points[0][1], points[3][1],points[1][1], points[2][1])]x=box[0]/1080y=box[1]/1080w=(box[2]-box[0])/1080h=(box[3]-box[1])/1080x1=points[0][0]/1080y1=points[0][1]/1080x2 = points[1][0]/1080y2 = points[1][1]/1080x3 = points[2][0]/1080y3 = points[2][1]/1080x4 = points[3][0]/1080y4 = points[3][1]/1080with open(txt_name,'a') as f:f.write(f"{first} {x} {y} {w} {h} {x1} {y1} 2 {x2} {y2} 2 {x3} {y3} 2 {x4} {y4} 2\n")# for i in range(4):# if box[i]>1079:# print("false----------------------")# img=cv2.imread(jpg_path)# cv2.rectangle(img,(int(box[0]),int(box[1])),(int(box[2]),int(box[3])), (0, 255, 0), 2)# cv2.imshow("Image with Rectangle", img)# cv2.waitKey(0)# cv2.destroyAllWindows()print("box:",box,'\n')# 输出所有提取的点#print(all_points,'\n')
-
数据标注:对于每一张图片,需要精确标注出车位线的关键点位置。这通常涉及到以下几个步骤:
- 选择标注工具:可以使用Labelme、CVAT等专业的图像标注工具。
- 定义关键点:确定车位线上的几个关键点,例如车位线的起点、终点以及中间的几个控制点。这些关键点用于描述车位线的形状和位置。
- 标注过程:在标注工具中,手动点击每个关键点的位置,并记录其坐标信息。对于复杂的车位线,可能需要增加更多的关键点以更准确地描述其形状。
- 质量检查:完成标注后,进行质量检查,确保每个关键点的位置准确无误。可以邀请多名标注人员进行交叉验证,提高标注的准确性。
-
数据增强:为了进一步提升模型的鲁棒性和泛化能力,可以通过数据增强技术生成更多样化的训练样本。常见的数据增强方法包括旋转、缩放、裁剪、颜色变换等。这些操作可以在保持原始信息不变的前提下,模拟不同的拍摄角度和光照条件,从而丰富训练集。

模型训练
-
模型选择与配置:YOLOv8是YOLO系列的最新版本,相比前代模型,在速度和精度上都有显著提升。选择YOLOv8作为基础模型,可以根据具体需求调整网络结构和超参数。例如,可以调整输入图像的分辨率、锚框的尺寸和数量等。
-
损失函数设计:在关键点检测任务中,除了传统的边界框回归损失外,还需要引入关键点定位损失。常用的损失函数包括均方误差(MSE)和Huber损失。通过优化这些损失函数,使模型能够同时学习到车位线的边界框和关键点位置。
-
训练过程:使用标注好的数据集对模型进行训练。训练过程中需要注意以下几点:
- 批量大小:根据GPU内存大小选择合适的批量大小。较大的批量大小可以加速训练,但也可能导致内存不足。
- 学习率调整:合理设置学习率及其衰减策略,避免模型过拟合或欠拟合。可以采用学习率预热、余弦退火等方法。
- 正则化:为了防止过拟合,可以添加L1或L2正则化项,或者使用Dropout等技术。
- 评估指标:在训练过程中,定期在验证集上评估模型性能。常用的评估指标包括平均精度(mAP)、关键点定位误差等。

-
模型优化:通过多次迭代训练,不断调整模型结构和超参数,直至达到满意的性能。可以尝试使用混合精度训练、知识蒸馏等技术进一步提升模型效果。
推理过程
-
模型部署:将训练好的模型导出为适用于目标平台的格式,如ONNX、TensorRT等。确保模型在实际应用场景中能够高效运行。
-
图像预处理:在进行推理之前,需要对输入图像进行预处理,包括调整图像大小、归一化等操作,使其符合模型输入的要求。
-
推理执行:将预处理后的图像输入模型,得到预测结果。输出包括车位线的边界框和关键点位置。
-
后处理:对模型输出进行后处理,例如去除低置信度的预测结果、平滑关键点位置等。通过后处理,可以进一步提高检测的准确性和稳定性。
-
决策逻辑:根据检测到的车位线信息,结合车辆当前位置和姿态,计算出最佳的泊车路径。这一过程通常涉及路径规划和控制算法,确保车辆能够安全、平稳地停入目标车位。

结论
基于YOLOv8的关键点车位线检测技术为自动泊车系统提供了一种高效、准确的解决方案。通过精心准备的数据集、合理的模型配置和优化的训练策略,可以实现对复杂场景下停车位的高精度识别。未来,随着深度学习技术的不断进步,这一领域的研究将更加深入,为智能驾驶的发展带来更多可能性。
计算机视觉、图像处理、毕业辅导、作业帮助、代码获取,远程协助,代码定制,私聊会回复!
相关文章:
自动泊车系统中的YOLOv8 pose关键点车位线检测
自动泊车系统中的YOLOv8关键点车位线检测技术解析 引言 随着智能驾驶技术的快速发展,自动泊车功能成为了现代汽车的重要组成部分。它不仅能够提高驾驶的安全性,还能在一定程度上解决城市停车难的问题。在自动泊车系统中,准确识别停车位的位置…...

Java html生成pdf和图片
在 Java 项目中将 HTML 生成图片是一项常见需求,特别是用于生成报告、预览页面截图等。不同的库和工具在渲染能力、性能以及支持的功能上有所不同。以下是几种主流的技术选型和对比,帮助你选择适合的解决方案。 技术对比总结 技术名称优点缺点适用场景…...

JavaWeb笔记整理——Redis
目录 Redis数据类型 各种数据类型的特点 Redis常用命令 字符串操作命令 哈希操作命令 列表操作命令 集合操作命令 有序集合操作命令 通用命令 在Java中操作Redis Spring Data Redis的使用方式 操作字符串类型的数据 编辑操作hash类型的数据 编辑 操作列表类…...
常用命令)
数据库(mysql)常用命令
一.常见的数据库端口号 Mysql默认端口:3306 oracle 默认端口:1521 Sql server 默认端口:1433 注:Mysql采用 的是C/S(客户端/服务器端)架构 二.sql 语法基础 服务器,数据库,数据表,记录,字段之间的关系: 一台Mysql服务器可以管理多个数据库 一个数据库可以存在多张二维表…...
源网荷储一体化新型电力系统解决方案
风光装机快速增长,加剧电力系统不可控性。截至2023H1,我国风电装机389.21GW,太阳能装机470.67GW,风光合计占总装机的31.76%。其中,2023年H1我国风电新增装机22.99GW,对比22年同期新增12.94GW,同…...

树莓派安装 OpenCV 教程
以下是在树莓派上安装 OpenCV 的教程: 笔者当前Python版本:3.7.3 一、更新树莓派系统 在终端中运行以下命令: sudo apt update sudo apt upgrade二、安装必要的依赖项 安装构建工具和图像 I/O 库: sudo apt install build-e…...

01,大数据总结,zookeeper
1 ,zookeeper :概述 1.1,zookeeper:作用 1 ,大数据领域 :存储配置数据 例如:hadoop 的 ha 配置信息,hbase 的配置信息,都存储在 zookeeper 2 ,应用领…...

伪工厂模式制造敌人
实现效果 1.敌人方实现 敌人代码 using UnityEngine; using UnityEngine.UI;public class EnemyBasics : MonoBehaviour {public int EnemySpeed { get; internal set; }public int EnemyAttackDistance { get; internal set; }public int EnemyChaseDistance { get; interna…...

【linux】pwd命令
pwd 命令在 Linux 和类 Unix 系统中用于显示当前工作目录的完整路径。它是 "print working directory" 的缩写。 当你在终端或命令行界面中工作时,你可能会在不同的目录(或文件夹)之间切换。pwd 命令帮助你确定你当前位于哪个目录…...

Python 如何封装工具类方法,以及使用md5加密
第一步:封装使用方法 在utils目录中,编写我的md5加密的方法,如下: import re import hashlib from os import path from typing import Callable from flask import current_app# 这里封装的是工具类的方法def basename(filenam…...

网络编程的应用
目录 1.单机程序和网络程序 2.客户端与服务端 3.网络编程三要素 3.1 IP地址 3.2 port端口 4.TCP编程 5.UDP编程 1.单机程序和网络程序 之前编写的程序都是单机程序,所有的业务功能实现及数据存储都在一个主机上完成,我们称为单机程序 我们在生活…...

佰朔资本:国内海风加速招标 船舶行业景气上行
昨日,沪指盘中一度下探失守2700点,尾盘在地产、银行等板块的带动下发力上扬,深证成指亦翻红。到收盘,沪指涨0.49%报2717.28点,深证成指涨0.11%报7992.25点,创业板指跌0.11%报1533.47点,上证50指…...

理解AAC和Opus的编码与解码流程
理解AAC和Opus的编码与解码流程及其在Android中的实现,对于音频开发非常重要。下面,我将详细解释这两种编码格式的原理、流程,并结合具体代码示例,帮助你在Android项目中合理地设计和使用它们。 一、AAC(Advanced Audio Coding) 1. AAC的原理与流程 AAC是一种有损音频压…...

设计图纸加密方法知多少?小编给你讲清楚
一、对称加密 使用对称加密算法,对设计图纸进行加密。对称加密使用相同的密钥进行加密和解密,确保只有持有正确密钥的人能够解密文件。 二、非对称加密 使用非对称加密算法,进行设计图纸的加密。非对称加密使用公钥加密、私钥解密的方式&a…...

pycv实时目标检测快速实现
使用python_cv实现目标实时检测 python 安装依赖核心代码快速使用实现结果展示enjoy python 安装依赖 opencv_python4.7.0.72 pandas1.5.3 tensorflow2.11.0 tensorflow_hub0.13.0 tensorflow_intel2.11.0 numpy1.23.5核心代码快速使用 # 使用了TensorFlow Hub和OpenCV库来实…...

记录下如何让字体在div内 自动换行 上下居中
div内样式 display: flex; // flex布局 justify-content: center; // 上下居中 align-items: center; // 左右居中 overflow-wrap: break-word; // 允许字体换行 (若行内的单词无法放下则换行) word-break: break-all; // 强制文本在任意字符间进…...

Shell篇之编写MySQL启动脚本
Shell篇之编写MySQL启动脚本 1. 脚本内容 vim mysql_ctl.sh#!/bin/bashmysql_port3306 mysql_username"root" mysql_password"molinker" mysql_conf"/opt/lanmp/mysql/etc/my.cnf" mysql_sock"/opt/lanmp/mysql/var/mysql.sock"func…...

supermap Iclient3d for cesium加载地形并夸大地形
先看效果图 这是没有夸张之前的都江堰 这是夸大五倍后的都江堰 下面展示代码 主要就是加载supermaponline的skt地形然后夸大 <template><div class"PartOneBox"><div id"cesiumContainer"></div></div> </template>…...

一文解读OLAP的工具和应用软件
OLAP(OnlineAnalyticalProcessing)是一种用于快速分析大规模、多维度数据的方法。OLAP工具和应用软件则是帮助人们进行OLAP分析的重要工具。本文将介绍几种常见的OLAP工具和应用软件,并探讨它们在数据分析中的作用。 一 OLAP工具的分类 在选…...
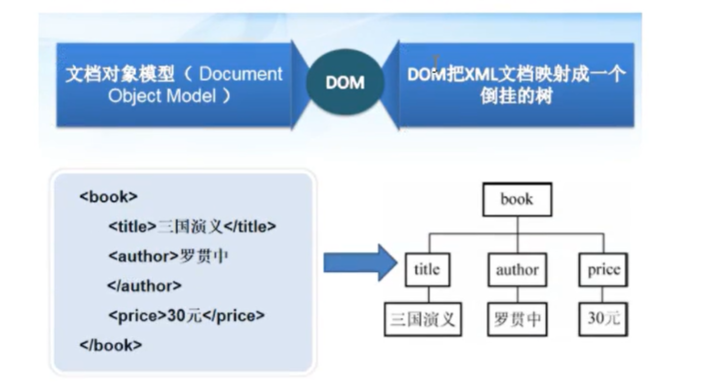
xml重点笔记(尚学堂 3h)
XML:可扩展标记语言 主要内容(了解即可) 1.XML介绍 2.DTD 3.XSD 4.DOM解析 6.SAX解析 学习目标 一. XML介绍 1.简介 XML(Extensible Markup Language) 可扩展标记语言,严格区分大小写 2.XML和HTML XML是用来传输和存储数据的。 XML多用在框架的配置文件…...

亚马逊 Rufus 关停,Alexa 正式上线:卖家必须读懂的6条新规则
2026年5月13日,亚马逊官方正式宣布,下线Rufus,推出全新AI购物助手:Alexa for Shopping。但是,这不是粗暴地直接下线 Rufus,而是一次购物AI底层架构的重组 —— 将 Rufus 的商品专长 与 Alexa的用户理解力&a…...

内存占用3KB!极致瘦身释放MCU无限可能
极致小体积,给工业领域带来了无限的可能:更低硬件成本,更小芯片体积,更低功耗,更高可靠性,让每一颗小MCU都拥有大系统的完整能力。 https://www.bilibili.com/video/BV1eZLi6PEjc/?spm_id_from333.1387.ho…...

中兴光猫终极管理指南:解锁工厂模式与Telnet权限的实战教程
中兴光猫终极管理指南:解锁工厂模式与Telnet权限的实战教程 【免费下载链接】zteOnu A tool that can open ZTE onu device factory mode 项目地址: https://gitcode.com/gh_mirrors/zt/zteOnu 掌握中兴光猫的设备管理和权限获取能力是网络管理员和技术爱好者…...

MongoDB Limit 与 Skip 方法详解
MongoDB Limit 与 Skip 方法详解 引言 MongoDB 是一个高性能、可伸缩的文档存储系统,它提供了强大的数据存储和查询功能。在处理大量数据时,Limit 与 Skip 方法是 MongoDB 中常用的查询优化工具。本文将详细介绍 MongoDB 中的 Limit 与 Skip 方法,包括其基本用法、性能影响…...

从RD、CS到WK:一文讲透SAR主流成像算法的演进与选型实战
从RD、CS到WK:SAR成像算法选型实战指南 当无人机掠过灾区上空,或卫星扫描地球表面时,合成孔径雷达(SAR)正通过电磁波穿透云层和黑暗,将地面信息转化为高分辨率图像。而决定图像质量的关键,在于工…...

独立开发者如何利用Taotoken Token Plan,以更低成本启动AI项目
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 独立开发者如何利用Taotoken Token Plan,以更低成本启动AI项目 对于独立开发者或小型团队而言,启动一个集成…...

氘可来昔替尼常见副作用为鼻咽炎头痛及腹泻,如何应对
任何口服药物的临床价值,都必须在疗效与安全性的天平上找到精准的平衡点。氘可来昔替尼以PASI 75应答率的全面胜出证明了自己在银屑病治疗中的卓越地位,而其不良反应谱同样经过了严苛的临床验证。鼻咽炎、头痛和腹泻构成了这款药物最需关注的三大安全信号…...

Adobe-GenP 3.0:轻松激活Adobe全家桶的完整指南
Adobe-GenP 3.0:轻松激活Adobe全家桶的完整指南 【免费下载链接】Adobe-GenP Adobe CC 2019/2020/2021/2022/2023 GenP Universal Patch 3.0 项目地址: https://gitcode.com/gh_mirrors/ad/Adobe-GenP Adobe-GenP 3.0是一款专为Adobe Creative Cloud系列软件…...

Windows Cleaner:终极免费系统清理工具,彻底解决C盘空间不足问题
Windows Cleaner:终极免费系统清理工具,彻底解决C盘空间不足问题 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner 你是否经常遇到C盘爆红、…...

终极指南:用D2DX让《暗黑破坏神2》在现代电脑上焕发新生
终极指南:用D2DX让《暗黑破坏神2》在现代电脑上焕发新生 【免费下载链接】d2dx D2DX is a complete solution to make Diablo II run well on modern PCs, with high fps and better resolutions. 项目地址: https://gitcode.com/gh_mirrors/d2/d2dx 还在为经…...