STM32 输入捕获模式详解:PWM 输入捕获与 PWI 模式(续篇)
在前两篇文章中,我们探讨了 STM32 输入捕获的基础和 PWI 模式的工作原理,特别是定时器的两个通道如何协同工作以捕获 PWM 信号。本文将进一步结合 STM32 标准库函数中的 TIM_PWMIConfig(),来讲解如何通过库函数配置定时器实现 PWI 模式。
我们将分析该函数的工作流程,讲解它是如何通过不同通道的配置来捕获上升沿和下降沿信号,并计算 PWM 信号的频率和占空比。
1. TIM_PWMIConfig() 函数概述
TIM_PWMIConfig() 函数专门用于配置定时器的 PWI 模式,以捕获外部的 PWM 信号。该函数的核心功能是将定时器的两个输入通道(通常是 CH1 和 CH2)分别设置为捕获上升沿和下降沿信号,从而实现对 PWM 信号周期和占空比的测量。
该函数主要完成了以下任务:
- 输入捕获极性设置:将一个通道(如 CH1)设置为检测上升沿,另一个通道(如 CH2)设置为检测下降沿。
- 通道选择:为两个通道选择输入信号源,CH1 直接输入,CH2 选择间接输入。
- 滤波和预分频器配置:设置输入信号的滤波和预分频参数。
2. TIM_PWMIConfig() 代码分析
void TIM_PWMIConfig(TIM_TypeDef* TIMx, TIM_ICInitTypeDef* TIM_ICInitStruct)
{uint16_t icoppositepolarity = TIM_ICPolarity_Rising;uint16_t icoppositeselection = TIM_ICSelection_DirectTI;/* 检查参数有效性 */assert_param(IS_TIM_LIST6_PERIPH(TIMx));/* 配置与输入极性相反的通道极性 */if (TIM_ICInitStruct->TIM_ICPolarity == TIM_ICPolarity_Rising){icoppositepolarity = TIM_ICPolarity_Falling;}else{icoppositepolarity = TIM_ICPolarity_Rising;}/* 配置与输入选择相反的通道选择 */if (TIM_ICInitStruct->TIM_ICSelection == TIM_ICSelection_DirectTI){icoppositeselection = TIM_ICSelection_IndirectTI;}else{icoppositeselection = TIM_ICSelection_DirectTI;}if (TIM_ICInitStruct->TIM_Channel == TIM_Channel_1){/* 配置TI1为上升沿捕获 */TI1_Config(TIMx, TIM_ICInitStruct->TIM_ICPolarity, TIM_ICInitStruct->TIM_ICSelection,TIM_ICInitStruct->TIM_ICFilter);/* 设置捕获预分频值 */TIM_SetIC1Prescaler(TIMx, TIM_ICInitStruct->TIM_ICPrescaler);/* 配置TI2为下降沿捕获 */TI2_Config(TIMx, icoppositepolarity, icoppositeselection, TIM_ICInitStruct->TIM_ICFilter);/* 设置捕获预分频值 */TIM_SetIC2Prescaler(TIMx, TIM_ICInitStruct->TIM_ICPrescaler);}else{/* 配置TI2为上升沿捕获 */TI2_Config(TIMx, TIM_ICInitStruct->TIM_ICPolarity, TIM_ICInitStruct->TIM_ICSelection,TIM_ICInitStruct->TIM_ICFilter);/* 设置捕获预分频值 */TIM_SetIC2Prescaler(TIMx, TIM_ICInitStruct->TIM_ICPrescaler);/* 配置TI1为下降沿捕获 */TI1_Config(TIMx, icoppositepolarity, icoppositeselection, TIM_ICInitStruct->TIM_ICFilter);/* 设置捕获预分频值 */TIM_SetIC1Prescaler(TIMx, TIM_ICInitStruct->TIM_ICPrescaler);}
}
3. 工作原理解析
3.1 上升沿与下降沿的捕获
在 PWI 模式中,TIM_PWMIConfig() 函数的核心任务是通过对两个通道的极性配置实现 PWM 信号的输入捕获。以 TIM3 为例:
- CH1 捕获上升沿:在函数中,CH1 配置为检测 PWM 信号的上升沿,捕获此时的计数器值。
- CH2 捕获下降沿:CH2 配置为捕获下降沿,从而获取信号的低电平时长。
该函数通过以下逻辑处理:
- 根据通道设置判断 CH1 捕获上升沿,CH2 捕获下降沿。
- 如果配置为上升沿捕获,CH1 的输入极性为
TIM_ICPolarity_Rising,而 CH2 则配置为相反的极性TIM_ICPolarity_Falling。 - 两个通道同时捕获相同的输入信号,通过 CH1 和 CH2 捕获到的不同时间点,计算出信号的周期和占空比。
3.2 通道选择
函数中不仅配置了通道的极性,还通过 TIM_ICSelection_DirectTI 和 TIM_ICSelection_IndirectTI 配置输入源:
- DirectTI(直接输入):对应的 TIx 信号源直接连接到输入捕获通道。
- IndirectTI(间接输入):另一个通道的输入信号作为该通道的捕获源。这在 PWI 模式中用于确保同一个引脚可以同时捕获上升沿和下降沿信号。
3.3 输入信号滤波和预分频
TIM_ICInitStruct->TIM_ICFilter 用于配置输入信号的滤波,确保抖动或噪声较大的信号不会误触发输入捕获事件。而 TIM_ICInitStruct->TIM_ICPrescaler 则用于调整输入信号的分频率,适用于需要对信号频率进行压缩测量的情况。
4. 基于标准库的完整 PWI 模式代码
void IC_Init(void)
{// 使能GPIOA和TIM3时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);// 配置PA6为输入模式GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // 上拉输入GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; // PA6引脚GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);// 配置TIM3基本参数TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructre;TIM_TimeBaseInitStructre.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStructre.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInitStructre.TIM_Period = 65536 - 1; // 自动重装载值 (ARR)TIM_TimeBaseInitStructre.TIM_Prescaler = 72 - 1; // 预分频值 (PSC)TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructre);// 配置PWM输入捕获TIM_ICInitTypeDef TIM_ICInitStructure;TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; // 通道1TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; // 上升沿TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; // 直接输入TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; // 输入不分频TIM_ICInitStructure.TIM_ICFilter = 0xf; // 滤波TIM_PWMIConfig(TIM3, &TIM_ICInitStructure);// 配置从模式为复位模式TIM_SelectInputTrigger(TIM3, TIM_TS_TI1FP1); // 选择TI1作为触发输入TIM_SelectSlaveMode(TIM3, TIM_SlaveMode_Reset); // 从模式为复位模式// 启动定时器TIM_Cmd(TIM3, ENABLE);
}uint32_t IC_GetFreq(void)
{return 1000000 / (TIM_GetCapture1(TIM3) + 1); // 单位为Hz
}uint32_t IC_GetDuty(void)
{return (TIM_GetCapture2(TIM3) + 1) * 100 / (TIM_GetCapture1(TIM3) + 1);
}
5. 小结
通过对TIM_PWMIConfig()函数的分析,我们进一步理解了如何通过 STM32 的标准库函数实现对外部 PWM 信号的捕获和测量。这不仅为开发者提供了更灵活的输入捕获配置方式,也让我们看到了 STM32 定时器的强大功能。你在实际使用输入捕获功能时,遇到过哪些挑战?分享你的解决方法吧!
相关文章:
)
STM32 输入捕获模式详解:PWM 输入捕获与 PWI 模式(续篇)
在前两篇文章中,我们探讨了 STM32 输入捕获的基础和 PWI 模式的工作原理,特别是定时器的两个通道如何协同工作以捕获 PWM 信号。本文将进一步结合 STM32 标准库函数中的 TIM_PWMIConfig(),来讲解如何通过库函数配置定时器实现 PWI 模式。 我…...

【C++】set/map(重点解析)
目录 一、关联式容器和序列式容器 二、C中的键值对——pair 1.概念 2.定义 3.构造pair 三.set 1.construct构造 2.iterator迭代器 3.insert插入 4.erase删除 5.find查找 6.lower_bound和upper_bound 7.count 四.multiset 五.map 1.insert 2.operator[] 一、…...
【算法篇】动态规划类(1)(笔记)
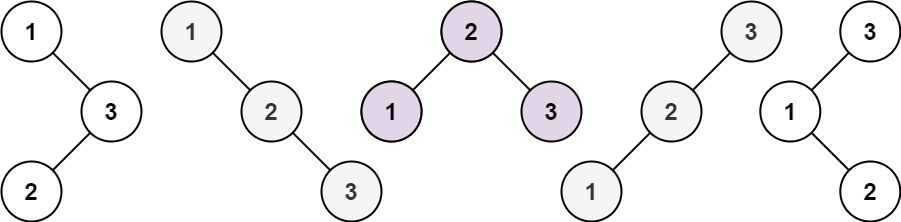
目录 一、理论基础 1. 大纲 2. 动态规划的解题步骤 二、LeetCode 题目 1. 斐波那契数 2. 爬楼梯 3. 使用最小花费爬楼梯 4. 不同路径 5. 不同路径 II 6. 整数拆分 7. 不同的二叉搜索树 一、理论基础 1. 大纲 动态规划,英文:Dynamic Programm…...
(41))
mysql学习教程,从入门到精通,SQL 约束(Constraints)(41)
在数据库设计中,约束(Constraints)用于确保数据的准确性和完整性。它们通过限制可以插入到数据库表中的数据类型来防止无效数据。SQL 中有几种常见的约束类型,包括主键约束(Primary Key)、外键约束…...

使用CSS3与JavaScript实现炫酷的3D旋转魔方及九宫格交换动效
文章目录 前言一、项目需求背景二、CSS3 3D基础知识介绍2.1 什么是CSS3 3D?2.2 主要使用的CSS属性 三、使用HTML和CSS搭建魔方结构四、让魔方动起来:CSS3动画五、九宫格数字交换的JavaScript实现5.1 九宫格布局5.2 随机交换数字 六、随机交换与相邻格子的…...

springboot项目通过maven的profile功能实现通过不同文件夹的方式来组织不同环境配置文件
写在前面 本文看下springboot项目如何通过文件夹的方式来组织不同环境配置文件。 1:正文 一般的我们写springboot项目时配置文件是这个样子的: appliction.yaml --> 通过spring.profiles.activexxx来激活某个指定后缀的配置文件 application-evn1…...

GAN(Generative Adversarial Nets)
GAN(Generative Adversarial Nets) 引言 GAN由Ian J. Goodfellow等人提出,是Ian J. Goodfellow的代表作之一,他还出版了大家耳熟能详的花书(Deep Learning深度学习),GAN主要的思想是同时训练两个模型,生成…...

linux下使用mpi求自然数和
搭建MPI并行计算环境,编写 MPI程序,求和 1 23....1 0000。 要求: 1.使用100个进程; 2.进程0计算1 2...100, 进程1计算101 102... 200, ..... 进程99计算9901 9902... 10000; 3.调用计时函数,分别输出每个进程的计算时间; 4.需使用MPI集群通信函数和同…...

WebGl学习使用attribute变量绘制一个水平移动的点
在WebGL编程中,attribute变量是一种特殊类型的变量,用于从客户端传递数据到顶点着色器。这些数据通常包括顶点的位置、颜色、纹理坐标等,它们是与每个顶点直接相关的信息。attribute变量在顶点着色器中声明,并且对于每个顶点来说都…...

机器学习四大框架详解及实战应用:PyTorch、TensorFlow、Keras、Scikit-learn
目录 框架概述PyTorch:灵活性与研究首选TensorFlow:谷歌加持的强大生态系统Keras:简洁明了的高层 APIScikit-learn:传统机器学习的必备工具实战案例 图像分类实战自然语言处理实战回归问题实战 各框架的对比总结选择合适的框架 1…...

linux源码安装slurm以及mung和openssl
一、源码安装munge 1、编译安装munge (1)下载munge地址:https://github.com/dun/munge/releases (2)解压编译安装: 1 2 3 4 5 6 7 8 创建/data目录 复制文件munge-0.5.15.tar.xz 到/data目录下 tar -Jx…...

分享蓝牙耳机A2DP音频卡顿原因及解决思路
背景 最近一直在更新博客,我觉得写博客有三个好处,一是很多东西时间久了就会忘,记下来方便自己以后回忆和总结,二是记下来可以加深自己对知识的理解,三是可以知识分享,方便他人。 言归正传,今天…...

Mac 下编译 libaom 源码教程
AV1 AV1是一种开放、免版税的视频编码格式,由开放媒体联盟(AOMedia)开发,旨在提供高压缩效率和优秀的视频质量。AV1支持多种分辨率,包括SD、HD、4K和8K,并适用于视频点播(VOD)、直播…...

【成品设计】基于Arduino平台的物联网智能灯
《基于Arduino平台的物联网智能灯》 整体功能: 这个任务中要求实现一个物联网智能灯。实际测试环境中要求设备能够自己创建一个热点,连接这个热点后能自动弹出控制界面(强制门户)。 功能点 基础功能 (60分) 要求作品至少有2个灯…...

安装和配置k8s可视化UI界面dashboard-1.20.6
安装和配置k8s可视化UI界面dashboard-1.20.6 1.环境规划2.初始化服务器1)配置主机名2)设置IP为静态IP3)关闭selinux4)配置主机hosts文件5)配置服务器之间免密登录6)关闭交换分区swap,提升性能7&…...

VLAN:虚拟局域网
VLAN:虚拟局域网 交换机和路由器协同工作后,将原先的一个广播域,逻辑上,切分为多个广播域。 第一步:创建VLAN [SW1]dispaly vlan 查询vlan VID(VLAN ID):用来区分和标定不同的vlan 由12位二进制构成 范围: 0-4…...

利用可解释性技术增强制造质量预测模型
概述 论文地址:https://arxiv.org/abs/2403.18731 本研究提出了一种利用可解释性技术提高机器学习(ML)模型性能的方法。该方法已用于铣削质量预测,这一过程首先训练 ML 模型,然后使用可解释性技术识别不需要的特征并去…...

FlexMatch: Boosting Semi-Supervised Learning with Curriculum Pseudo Labeling
FlexMatch: Boosting Semi-Supervised Learning with Curriculum Pseudo Labeling 摘要:引言:背景3 flexMatch3.1 Curriculum Pseudo Labeling3.2 阈值预热3.3非线性映射函数实验4.1 主要结果4.2 ImageNet上的结果4.3收敛速度加速4.4 消融研究5 相关工作摘要: 最近提出的Fi…...
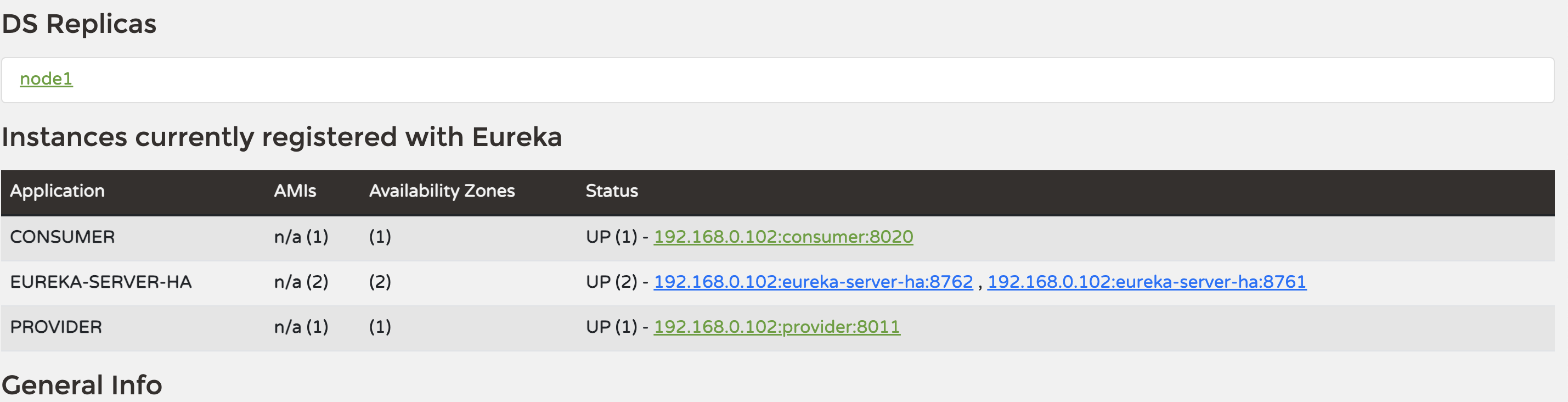
Spring Cloud 3.x 集成eureka快速入门Demo
1.什么是eureka? Eureka 由 Netflix 开发,是一种基于REST(Representational State Transfer)的服务,用于定位服务(服务注册与发现),以实现中间层服务的负载均衡和故障转移ÿ…...
线性代数 矩阵
一、矩阵基础 1、定义 一组数按照矩形排列而成的数表;形似行列式,区别点是 矩阵行列式符号()或[]| |形状方阵或非方阵方阵本质数表数属性A|A|是A诸多属性中的一种维度m *n (m 与n可以相等也可以不相等)n*n 同型矩阵 若A、B两个矩阵都是mn 矩阵&#x…...
)
用Python和OpenCV手把手教你搞定自动驾驶图像坐标系转换(附NuScenes数据集实战代码)
用Python和OpenCV手把手教你搞定自动驾驶图像坐标系转换(附NuScenes数据集实战代码) 自动驾驶技术的核心在于让车辆"看懂"周围环境,而坐标系转换正是连接物理世界与数字世界的桥梁。想象一下,当一辆自动驾驶汽车行驶在…...

基于AutoHotkey的Windows桌面自动化工具开发实战
1. 项目概述与核心价值最近在整理个人项目库时,翻到了一个挺有意思的“老伙计”——cua_desktop_operator_skill。这个项目名听起来有点拗口,直译过来是“CUA桌面操作员技能”。乍一看,可能会让人联想到某种工业控制台的专用软件。但实际上&a…...

如何3分钟搭建智能手机号定位系统:免费归属地查询终极指南
如何3分钟搭建智能手机号定位系统:免费归属地查询终极指南 【免费下载链接】location-to-phone-number This a project to search a location of a specified phone number, and locate the map to the phone number location. 项目地址: https://gitcode.com/gh_…...
)
别再拷贝exe到NXBIN了!用批处理文件搞定NX二次开发外部exe的环境变量(附VS2015/NX12配置)
告别手动拷贝:用批处理智能管理NX二次开发环境变量 每次修改完NX二次开发的外部exe程序,都要手动拷贝到NXBIN目录?这种重复劳动不仅低效,还容易导致版本混乱。其实只需一个简单的批处理脚本,就能彻底解决环境变量配置问…...

Lingoose:轻量级LLM编排框架的设计哲学与工程实践
1. 项目概述:从“Lingo”到“Goose”,一个轻量级LLM编排框架的诞生最近在折腾大语言模型应用开发的朋友,估计都绕不开一个核心问题:如何高效、优雅地编排和串联多个LLM调用、工具调用以及数据处理流程?当你从简单的单次…...

基于MCP与Apify构建AI驱动的投资另类数据研究工具
1. 项目概述:当投资研究遇上AI代理如果你是一名量化研究员、对冲基金分析师,或者只是一个对金融市场充满好奇、希望用数据驱动决策的独立投资者,那么你肯定对“另类数据”这个词不陌生。传统的财报、股价、宏观经济指标,这些“传统…...

ARM Debug Interface v5.1架构解析与调试实践
1. ARM Debug Interface v5.1架构深度解析1.1 调试接口技术演进与核心价值ARM调试接口(ADI)技术历经多次迭代,v5.1版本作为当前主流标准,在嵌入式系统调试领域确立了关键地位。调试接口本质上是处理器核与外部调试工具之间的标准化通信桥梁,其…...

开源可视化利器:用声明式数据驱动构建交互式技术解释图
1. 项目概述:一个将复杂概念可视化的开源利器最近在整理技术分享材料时,我一直在寻找一种能直观展示复杂系统架构或算法流程的工具。传统的流程图工具要么太笨重,要么定制化程度不够,直到我遇到了nicobailon/visual-explainer这个…...

FPGA与GPU在OSOS-ELM算法中的性能对比与优化
1. 项目概述在边缘计算和实时信号处理领域,极端学习机(ELM)因其独特的训练机制和高效的计算性能而备受关注。OSOS-ELM作为ELM的一种变体,通过在线顺序学习机制进一步提升了算法的实用性。这项研究聚焦于FPGA和GPU两种硬件平台在执行OSOS-ELM算法时的性能…...

MacOS光标增强工具:命令行驱动,实现自动化与个性化配置
1. 项目概述:当光标成为生产力工具如果你是一名长期在macOS上工作的开发者、设计师或者文字工作者,你肯定对系统自带的光标功能又爱又恨。爱的是它简洁流畅,恨的是它在某些高强度、多任务场景下显得力不从心。比如,当你需要在多个…...